Vol.11, No.6, pp.10-16 (2017) https://doi.org/10.20910/JASE.2017.11.6.10
멀티콥터 풍동시험
황승재1,†· 조태환2· 김양원2 · 정진덕2
1,한국항공우주연구원 항공연구본부 공력성능연구팀
2한국항공우주연구원 항공연구본부 공력성능연구팀
Multi-copter Wind-tunnel Test
SeungJae Hwang1,†, TaeHwan Cho2 , YangWon Kim2 and JinDeog Chung2
1Korea Aerospace Research Institute, Aerodynamics Research Team
2Korea Aerospace Research Institute, Aerodynamics Research Team
Abstract
In order to improve the safety of the multi-copter, Korea Aerospace Research Institute (KARI) performed a wind-tunnel test using an octocopter with the maximum takeoff weight (MTOW) of 28 kg. The wind-tunnel test was performed with three different RPM ranges, 3,500, 4,500 and 5,500 rpm, and three different wind speeds, 3.5, 5 and 7 m/sec. The tested range of the angle of attacks was –40° to 20° degree and ±90°
degree. Vortex ring state (VRS) of the tested multi-copter was located around the vertical descending speed of 6 m/sec and the decrement of thrust was about 13 % at the time of testing. Compared with the single propeller wind-tunnel test result, the propeller efficiency of the octocopter dropped to 10 to 15% depending on the propeller RPM. It is hypothesized that the obtained aerodynamic characteristics by the wind-tunnel test will be used to improve the performance and wind resistance of the multi-copter.
초 록
한국항공우주연구원(KARI)이 보유하고 있는 개방형 풍동에서 최대이륙중량 28 kg급 옥터콥터 (octocopter)를 시험모델로 상승·하강기류, 측풍, 전단류와 같은 악기상에 대한 대처 능력을 향상 시키고 와류고리상태(VRS)와 같은 공기역학적 현상을 규명하여 와류고리상태(VRS) 진입 예방 및 탈출할 수 있 는 기술들을 연구하고자 풍동시험을 수행하였다. 소형무인기 풍동시험은 풍속 3.5, 5, 7 m/sec, 회전수 3,500, 4,500, 5,550rpm 조건에서 받음각 –40°~+20° 도, ±90° 도, 요각 0° 도와 45° 도로 변화시켜가며 6분 력을 측정하여 공력 DB를 작성하였다. 멀티콥터 수직 하강 시험 시 하강속도 6 m/sec에서 와류고리상 태의 최고점(VRS peak)이 나타나고, 이 때 약 13 % 정도의 추력감소가 나타났다. 프로펠러 및 동체 상 호 간섭에 의한 성능저하 여부를 판단하기 위해 프로펠러 조합을 변화시켜가며 시험을 수행한 결과 단 일 프로펠러 대비 최대 15 % 정도의 성능 저하가 있음을 확인할 수 있었다. 이번 시험으로 확보한 자 료들은 소형무인기 운용 시 경험하게 되는 악기상에 대처하여 안전성과 생존성을 증대시키기 위한 기 술개발 기초자료로 활용될 예정이다.
Key Words : Multi-copter(멀티콥터), Windtunnel Test(풍동시험), VRS(와류고리상태), Turbulence(난류), Gust(돌풍)
Received: Sep. 14, 2017 Revised: Nov. 10, 2017 Accepted: Nov. 15, 2017
† Corresponding Author
Tel: +82-042-870-3567, E-mail: [email protected]
Ⓒ The Society for Aerospace System Engineering
1. 서 론 최근 멀티콥터의 활용 분야가 군사적 목적 이외에 영상 촬영, 드론 레이싱과 같은 취미생활 등 다양한 분야로 활성화가 되면서 멀티콥터의 안정성이 더욱 문 제가 되고 있다. 더구나, 드론을 활용한 무인 택배나 인명 구조, 재난 감시 등 생활 밀착형 용도로 활용하 기 위해서는 현재의 멀티콥터 한계를 뛰어 넘는 안정
성이 요구된다. 멀티콥터는 강한 상승기류, 건물사이에 서 발생하는 전단류, 돌풍 등의 악기상에서 와류고리 상태(Vortex Ring State)에 진입하는 경우가 종종 발 생하며, 진입 시 비행력을 회복하지 못하고 추락하는 경우가 많다. 최근에는 이런 한계를 극복하고 멀티콥 터의 운용성과 안정성을 확장하기 위해 난류발생장치 를 이용한 멀티콥터 풍동시험[1], 실시간 바람 측정 장치를 이용한 바람저항성능(wind resisting performance)을 높이는 연구[2], 멀티콥터 제어법칙 개선[3], 저 레이놀즈 유동조건에서 프로펠러 성능 개 선[4], 등 많은 연구들을 진행하고 있다. 한국항공우 주연구원(KARI)에서도 소형무인기 운용 시 경험하게 되는 상승·하강 기류, 측풍, 전단류와 같은 악기상에 대한 대처 능력을 향상시키기 위한 기술을 개발하기 위해, KARI의 개방형 풍동을 이용하여 멀티콥터의 공 기역학적 현상을 규명하고 이를 바탕으로 와류고리상 태(VRS) 진입 예방 및 진입 시 탈출할 수 있는 기술 들을 연구하고자 풍동시험을 수행하였다. 멀티콥터의 공력특성을 예측하고 6분력에 대한 공력 DB를 확보하 기 위한 풍동시험은 NASA[5]에서 수행한 시험을 바 탕으로 풍속, 회전수(RPM), 받음각(α), 요각(β)을 변수 로 하여 공력특성을 측정하였다.
2. 멀티콥터 풍동시험
2.1 풍동시험 장치
멀티콥터 풍동시험은 로터 후류에 의한 유동장 교란 현상을 최소화하기 위해 KARI가 보유하고 있는 개방 형 풍동 시험부에서 수행하였다. 시험모델이 시험부 중심에 위치하도록 하기 위해 시험부 바닥에 원통형 지지대를 설치하였고, 지지대 상부에 회전기능을 갖는 회전부(rollhead)를 설치하였다. 회전부는 롤(roll) 방 향 회전을 구현하기 위한 기어박스, 멀티콥터 시험모 델에 작용하는 힘과 모멘트를 측정하기 위한 6분력 로 드셀(loadcell) 및 시험모델을 연결하기 위한 연결부 (model adapter) 등으로 구성하였다. 자세한 시험장치 구성은 Fig. 1을 통해 확인할 수 있다.
시험모델에 작용하는 힘과 모멘트를 측정하기 위한 6분력 로드셀은 HMB사 MSC10 Series 제품으로 Fig. 1을 통해 확인할 수 있다. 시험에 사용한 로드셀
의 하중범위와 정밀도는 Table 1을 통해 확인할 수 있다. 지속적인 멀티콥터를 이용한 풍동시험을 수행하 기 위해 무인기에 사용하는 배터리를 대신하여 외부 전원 공급 장치를 사용하여 시험을 수행하였다. 외부 전원 공급 장치는 다우 나노텍사의 DAP-60110R 제 품으로 DC output 0~60 V까지 가변이 가능하며, 전 류는 110 A까지 사용이 가능한 제품으로 배터리팩과 동일한 운용 조건을 지속적으로 만들어 낼 수 있다.
시험 조건인 프로펠러 회전수(RPM)를 실시간으로 관 찰하기 위해 각각의 프로펠러 지지대(arm)에 광센서를 부착하여 각 시험조건에서 운용되고 있는 개별 프로펠 러의 회전수를 측정하도록 시험 장치를 구성하였다.
a) Multi-copter supporting device
b) rollhead c) loadcell Fig. 1 Rollhead and Supporting Device
Table 1 Loadcell Range and Accuracy
Load Range Accuracy Normal force (Z) 500 kg 0.05 % Side force (Y) 100 kg 0.05 % Axial force (X) 100 kg 0.05 % Pitching moment(My) 49 N·m 0.05 % Yawing moment(Mz) 49 N·m 0.05 % Rolling moment(Mx) 49 N·m 0.05 %
프로펠러 상호간 간섭효과를 분석하기 위해 프로펠 러 단독성능시험 장치를 따로 구성 하였다. 프로펠러 추력 측정을 위해 다셀 제품의 1축 로드셀(loadcell)을 지지부에 설치하였다. 사용된 로드셀은 다셀(주)에서 생산된 제품으로 50 kg·f까지 측정이 가능하다. 실시 간 회전수(RPM) 측정을 위해 광센서를 프로펠러 지지 대(arm)에 부착하여 정확한 회전수를 측정할 수 있도 록 시험 장치를 구성하였다. 구축한 프로펠러 단독시 험 장치는 Fig. 2를 통해 확인할 수 있다.
Fig. 2 Propeller Wind-tunnel Test Rig
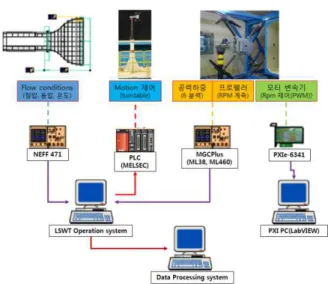
비행체 및 프로펠러의 받음각 변경은 PLC로 제어되 는 회전판을 사용하여 구현하였으며, 회전각은 인코더 (encoder)를 사용하여 측정하였다. 압력과 온도 등 시 험부 운용조건은 해당 센서 및 NEFF471을 통해 측정 하였다. 시험모델의 힘과 모멘트는 MGCPlus-ML38 모듈을 사용하여 측정하였으며, 프로펠러 회전수 (RPM) 신호는 MGCPlus-ML460 모듈을 사용하여 측정하였다. 프로펠러 회전수 제어를 위한 PWM 신호 는 NI-PXI를 사용하여 구현하였다. 10 Hz로 7초 동 안 측정한 데이터 값의 평균을 취하여 시험데이터로 사용하였다. 풍동시험에 사용된 계측 및 제어장비는 Fig. 3을 통해 확인할 수 있다.
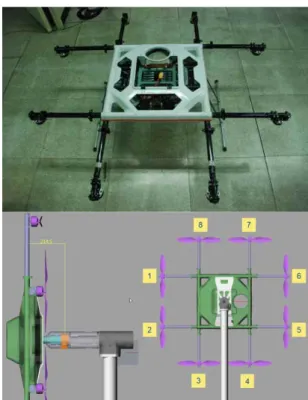
소형무인기 풍동시험을 위해 선정한 비행체는 ㈜성 우에서 농약살포용 무인기로 개발한 옥터콥터 (octocopter) 모델로서 상용기체의 일부분을 수정하여
Fig. 3 KARI’s Low Speed Wind-tunnel System
풍동시험용 모델로 사용하였다. 기존 FCC와 배터리팩 을 제거한 후 제어 및 신호계측 전원라인이 들어갈 수 있는 구조로 내부구조를 변경하였고, 모터 회전수 (motor RPM) 제어를 위한 변속기 제어신호를 외부로 부터 공급 받을 수 있도록 시스템을 개조하였다. 프로 펠러의 정확한 회전수 측정을 위하여 별도의 브라켓을 제작하여 프로펠러 지지대(arm)에 부착하였으며, 광화 이버 센서(오토닉스, FD-320-05)와 앰프(오토닉스, BF5R-S1_Single display type)를 조합하여 회전속도 를 측정하였다. 실 비행과는 달리 풍동시험에서는 비 행체에 부가되는 모든 힘이 기체-지지부 연결부에 부 가되므로 결합 부분의 구조강성을 보강하기 위해 별도 의 브라켓을 제작하여 기체 밑면에 부착하였다. 결합 부위 브라켓은 비행체 공력특성에 미치는 영향을 최소 화하기 위해 Fig. 4와 같이 기체 밑면 형상을 유지하 는 형상으로 제작하였다. 시험에 사용된 프로펠러 제 어 및 측정 장치는 총 4개의 신호를 제어할 수 있으 나, 대상 비행체는 8개의 프로펠러를 가지고 있으므로 비행체 프로펠러를 1,2번, 3,4번, 5,6번, 7,8번과 같이 4쌍으로 묶어 각 쌍별로 회전수 제어 및 회전수 측정 이 가능하도록 장치를 구성하였다.
2.2 풍동시험 조건
멀티콥터 풍동시험은 KARI가 보유하고 있는 개방형 풍동에서 수행하였다. 개방형 풍동의 시험부 크기는 5(W) x 3.75(H) x 11(L) m이고, 풍속은 3~68 m/sec까지 가능하며 난류 강도(Turbulence intensity)
Fig. 4 Renovated Wind-tunnel Test Model
는 0.25 %이다. 멀티콥터 풍동시험 시 수직 상승조건 (받음각 -90°도)과 수직 하강조건(받음각 +90°도)의 구현과 멀티콥터 구동 시 발생하는 다운워시 (downwash)가 다시 프로펠러 회전면으로 유입되어 유동장이 실제 운용환경과 다르게 교란되는 현상을 최 소화하기 위해 시험모델을 시험부의 바람의 방향과 직 각이 되도록 설치하여 시험을 수행하였다. 개방형 풍 동의 시험부에 설치된 옥터콥터(octocopter) 모델은 Fig. 5를 통해 확인할 수 있다.
Fig. 5 Octocopter Wind-tunnel Test Model
단일(Single) 프로펠러 시험은 풍속 0, 3.5, 5, 10 m/sec에서 모터 회전수 3,000rpm, 4,000rpm, 5,000rpm의 세 경우에 대해 받음각 –90°~+90° 도 (-20°~+20° 도는 2° 도 간격, ±20°~±90° 도는 5°
도 간격)로 변화시켜 가며 시험을 진행하였다.
전기체 시험은 개방형 풍동의 안정성을 고려한 최저 속도인 3.5 m/sec부터 시작하여 시험기체의 진동과 구조적 안정성 확보가 가능한 풍속인 7 m/sec 내에서 풍속 0, 3.5, 5, 7 m/sec에서 모터 회전수를 3,500rpm, 4,500rpm, 5,500rpm의 세 경우에 대해 받 음각(α) –40°~+40° 도(-20°~+20° 도는 2° 도 간격,
±20°~ ±40° 도는 5° 도 간격), 요각(β) 0° 도와 45°
도 두 가지 경우로 변화시켜 가며 시험을 진행하였다.
수직하강 시 와류고리상태(VRS)를 풍동시험으로 구현 하기 위해 받음각 +90° 도에서 회전수(RPM)를 4,000rpm으로 고정하고 풍속을 0~8 m/sec으로 변화 시켜 가며 시험을 진행 하였다. 수직상승 시 공력성능 변화를 측정하기 위하여 받음각 -90° 도에서 회전수 (RPM)를 5,500rpm으로 고정하고 풍속을 5~9 m/sec 으로 변화시켜 가며 시험을 진행 하였다.
프로펠러 상호 간섭에 의한 효율저하 여부를 판단하 기 위하여 프로펠러 4, 6, 8개의 경우를 회전수를 3,000~6,000rpm 으로 변화시켜 가며 시험을 진행하 였다.
3. 멀티콥터 풍동시험 결과
풍동시험 모델로 선정한 옥터콥터는 전후좌우 대칭 을 가지는 형상으로 피치(pitch) 각을 변화시켜 가며 확보한 공력 DB가 롤(roll) 각과 요(yaw) 각을 변화시 켜 가며 시험한 공력 DB와 별 차이가 없는 걸로 판단 하여 피치 각 변화에 대한 풍동시험만 진행하였다. 회 전수 변화는 앞쪽 프로펠러 4개와 뒤쪽 프로펠러 4개 를 쌍으로 묶어 실제 멀티콥터 운용 회전수 범위인 3,500rpm, 4,500rpm, 5,500rpm에서 풍속 3.5, 5, 7 m/sec에서 6분력을 측정하여 공력 DB를 확보하였다.
처음 시험계획은 받음각 –40°~+40° 도(-20°~+20°
도는 2° 도 간격, ±20°~ ±40° 도는 5° 도 간격)에서 시험하며 공력 DB를 작성할 계획이었으나, 받음각 +20° 도(pitch up 상태) 이후 기체진동이 심하게 발생
하여 시험의 안전성을 고려하여 –40°~+20° 도 (-20°~+20° 도는 2° 도 간격, -20°~ -40° 도는 5°
도 간격)로 받음각 범위를 좁혀 풍동시험을 수행하였 다. 전방 프로펠러 후류가 후방 프로펠러에 미치는 현 상을 고려하기 위해 요각(β) 0° 도와 45° 도 두 경우 를 추가하여 시험을 수행하였다. 자세한 풍동시험 시 험 결과는 Fig. 6을 통해 확인할 수 있다.
Fig. 6 Octocopter Wind-tunnel Test Results [RPM 3,500/4,500/5,500 & Wind 3.5/5/7 m/sec]
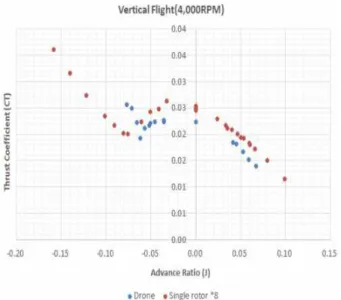
프로펠러 및 동체 상호간섭에 의한 성능저하 여부를 판단하기 위해 프로펠러 단독시험, 동체 단독시험, 전 기체에서 프로펠러 4개, 6개, 8개 조합의 풍동시험을 수행하였다. 프로펠러 단독성능시험 결과는 Fig. 7을 통해 확인할 수 있다. 단일 프로펠러 성능시험결과를 100으로 놓고 프로펠러 상호간섭 효과 시험결과를 보 면 프로펠러 단면으로 유입되는 인플로우(inflow) 교란 과 기체와 프로펠러 지지대(arm)의 진동으로 인한 교 란 등 복합적인 요소로 인해 최대 15 % 정도의 성능 저하가 발생한 걸로 판단된다. 프로펠러 상호간섭 시 험결과는 Fig. 8을 통해 확인할 수 있다.
Fig. 7 Single Propeller Wind-tunnel Test Results
Fig. 8 Propeller Efficiency Test Results
멀티콥터 수직상승 시 공력 DB 확보와 수직하강 시 발생할 수 있는 와류고리상태(VRS)를 재현하기 위해 풍동시험을 수행하였다. 프로펠러 단독시험결과는 수 직하강 조건(프로펠러 회전수 4,000rpm)에서 하강속 도 7.5 m/sec(VRS peak)에서 와류고리상태에 의한
약 20 % 정도의 추력감소가 나타났다. 하강속도 10 m/sec 이후부터는 하강속도가 증가함에 따라 추력이 증가하고 있으며, 풍차제동상태(windmill brake state) 로 진입하는 것으로 판단된다. 시험결과는 Fig. 9를 통 해 확인할 수 있다. 전기체 수직하강 시험에서는 하강 속도 6 m/sec(VRS peak)에서 와류고리상태(VRS)에 의한 약 13 % 정도의 추력감소가 나타났다. 시험결과 는 Fig. 10을 통해 확인할 수 있다. 전기체 시험 역시 하강속도 8 m/sec 이후부터는 풍차제동상태(windmill brake state)에 진입하여 추력 증가가 예상되나 기체 진동 및 시험 안전성을 고려하여 풍동시험을 수행하지 는 않았다. 단일 프로펠러시험(7.5 m/sec, 와류고리상 태 진입에 의한 20 % 추력 감소)에 대비해 전기체 시 험결과(6 m/sec, 와류고리상태 진입에 의한 13 % 추 력 감소)를 비교 분석해 보면 전기체가 더 낮은 속도 에서 와류고리상태에 진입함을 알 수 있다. 시험결과 들은 Fig. 11을 통해 확인할 수 있다.
Fig. 9 Single Propeller VRS Test Results
Fig. 10 Octocopter VRS Wind-tunnel Test Results
Fig. 11 VRS Wind-tunnel Test Results Comparison
4. 결 론
한국항공우주연구원(KARI)이 보유하고 있는 개방형 풍동에서 옥터콥터(octocopter)을 시험모델로 6분력 측정을 하여 소형무인기 공력 DB 확보와 와류고리상 태(VRS) 진입 및 공기역학적인 물리현상을 분석하기 위한 풍동시험을 수행하였다. 시험결과 프로펠러 상호 간섭 효과에 의한 단일 프로펠러 대비 최대 15 % 정 도의 효율 감소를 확인하였다. 또한, 단일 프로펠러시 험 시 회전수 4,000rpm에서 하강속도 7.5 m/sec에서 와류고리상태 최고점(VRS peak)이 나타나고 이때 와 류고리상태 진입에 의한 20 % 정도의 추력이 감소 하였다. 단일 프로펠러시험과 동일한 시험조건에서 전 기체 시험을 수행한 결과 하강속도 6 m/sec에서 와류 고리상태 최고점(VRS peak)이 나타나고 이때 와류고 리상태 진입에 의한 13 % 정도의 추력이 감소하였다.
단일 프로펠러에 비해 전기체 시험 시 와류고리상태 진입에 의한 추력 감소량은 적으나 와류고리상태 진입 속도는 빨라져 하강속도 6 m/sec에서 와류고리상태 최고점이 나타남을 확인할 수 있었다. 이번 시험으로 확보한 시험자료들은 향후 소형무인기 운용 시 경험하 게 되는 상승·하강 기류, 측풍, 전단류 등 악기상에 대 처하여 안전성과 생존성을 증대시키기 위한 기술개발 기초자료로 활용될 예정이다.
후 기
본 연구는 과학기술정보통신부 재원으로 한국연구재 단, 무인이동체미래선도핵심기술개발사업단의 지원을 받아 수행되었음.(No. 2016M1B3A1A03937671)
References
[1] D. Kubo, "Dynamic Response Evaluation of Small Multirotor in Wind Tunnel with Gust Generator" The 2016 Asia-Pacific International Symposium on Aerospace Technology, October 25-27, 2016
[2] T. Yamamoto, T. Higuchi, F. Nagasaki and S. Ueno,
"Development of Multirotor with Wind Resisting Performance," The 2016 Asia-Pacific International Symposium on Aerospace Technology, October 25-27, 2016
[3] Jae-Hyun Jin and Jin-Hee Jo, "A Test Bench with Six Degrees of Freedom of Motion For Development of Small Quadrotor Drones," Journal of Aerospace System Engineering, vol. 11, No. 1, Februrary, 2017.
[4] Senghyung Yun and Cheolheui Han "Aerodynamic Design and Performance Analysis of a Propeller at Low Reynolds Number Flow Conditions," Journal of Aerospace System Engineering, vol. 9, No. 1, pp.7-11, March, 2015.
[5] C. Russel, J. Jung, G. Willink and B. Glasner, 2016,
"Wind Tunnel and Hover Performance Test Results for Multicopter UAS Vehicles," AHS 72nd Annual Forum, May 16-19, 2016

![Fig. 6 Octocopter Wind-tunnel Test Results [RPM 3,500/4,500/5,500 & Wind 3.5/5/7 m/sec]](https://thumb-ap.123doks.com/thumbv2/123dokinfo/5101951.326810/5.892.128.380.307.1068/fig-octocopter-wind-tunnel-test-results-rpm-wind.webp)