풍력에너지저널 pp. 65~72
반잠수식 풍력터빈 공진 회피 제어 알고리즘 설계
김관수
*
․김정태*
․김현종*
․박종포**
Design of Resonance Avoidance Control Algorithm for Semi-submersible Wind Turbine
Kwansu Kim
*
, Jungtae Kim*
, Hyunjong Kim*
and Jongpo Park**
Key Words : Resonance avoidance (공진회피), Control (제어), Semi-submersible (반잠수식), Floating wind turbine (부유식 풍력터빈), Damage equivalent load (손상등가하중), Fatigue load (피로하중)
ABSTRACT1)
In this paper, a resonance avoidance control algorithm was designed to suppress the resonance phenomenon acting on the tower of a semi-submersible wind power system. Floating wind systems have some parts that need to be redesigned due to interface problems between the floater and turbine. In particular, the resonance of the tower is a serious issue, and a tower redesign process is generally conducted. Since the target wind power system has operating point in which resonance easily occurs due to the frequency of wind, it is difficult to satisfy design life requirements. Therefore, in this study, DNV GL Bladed wind turbine design software was used to analyze the performance of the control algorithm in wind conditions that frequently produce resonance. The results showed that the maximum load and fatigue load of the bending moment in the side-side direction of the tower base were reduced by 21.84 % and 48.05 %, respectively.
기호설명
: 적분 게인 [Nms/rad]
: 비례 게인 [Nm/rad] : 발전량 [W]
: 반력 토크 지령 [Nm]
: 정격 반력 토크 [Nm]
: 발전기 속도 [rad/s]
: 정격 발전기 속도 [rad/s] : 피치 각 [deg]
: 최대효율 피치 각 [deg]
: 피치 각 지령 [deg]
: 출력계수 [.] : 발전기 속도 오차 [rad/s]
: 최적모드 게인 [Nm/(rad/s)^2]* 고등기술연구원, 풍력에너지전환연구팀
** 고등기술연구원, 풍력에너지전환연구팀 (교신저자) E-mail : [email protected]
DOI : https://www.doi.org/10.33519/kwea.2020.11.4.007 ISSN : 2093-5099 (Print), 2733-9467 (Online) Received : November 26, 2020, Revised : December 8, 2020 Accepted : December 9, 2020
1. 서 론
부유식 풍력발전 시스템은 공력, 유체력, 계류력, 유
연체 동역학 및 제어 기술 등이 하나로 접목된 다양한
공학적 지식을 요구하는 시스템이다. 부유식 풍력발전
시스템은 부유체 제조사에서 수치 해석 및 수조실험
등을 통해 충분히 검증이 수행된 부유체에 상용 해상
풍력터빈을 결합하는 형태로 개발되는데 설계 초기부 터 동시에 개발되지 않기 때문에 구조, 진동 측면에서 상당부분 문제점이 발생할 수 있다.
특히 타워에 공진 현상이 발생하면 특정 운전 영역 에서 타워의 진동을 증폭시켜 심각한 스트레스로 작용 하며, 이는 피로 하중의 증가로 이어져 설계 수명을 만족시키지 못하는 결과를 야기할 수 있다 [1]. 부유식 풍력발전 시스템의 공진 현상을 방지하기 위해서는 타 워 재설계를 통해 운전 영역의 회전 주파수에 기인한 가진 주파수와 타워의 진동 모드를 서로 멀어지게 하 는 방법과 동조질량댐퍼(TMD: Tuned Mass Damper) 의 설치로 진동을 막는 방법이 있다 [2, 3]. 타워 재설 계의 경우는 설계 인증을 위한 설계하중케이스(DLC:
Design Load Cases)를 만족시키는 것과 동시에 부유 체의 균형(Balancing), 비용저감 등 고려할 사항이 많 고, 이러한 부분들을 모두 고려하여 재설계가 수행되 어도 공진은 발생될 수 있다. TMD도 결과적으로 비 용 증가로 귀결되는 문제가 있다.
따라서 본 논문에서는 운전 영역에 공진이 발생하 는 부유식 풍력발전 시스템을 대상으로 제어 기술을 통해 공진 현상의 빈도를 낮추어 피로 하중을 저감하 는 것에 초점을 맞추어 연구를 수행하였다. 기존 연구 에서는 육⸳해상 고정식 풍력발전 시스템에 발생하는 공진 문제를 다루었다 [4, 5]. 본 연구에서는 부유식 풍 력발전 시스템에 적용하여 풍력터빈 타워의 공진 문제 가 부유체에 미치는 영향도 검토하였다. 육⸳해상 고정 식 중형, 대형 풍력발전 시스템의 기계적 하중을 줄이 기 위한 시도는 정격 풍속 이상에서 피치 제어를 통한 타워 댐퍼, 개별 피치 제어, 피크 쉐이빙 등이 있다 [6-8]. 이러한 제어 기술은 부유식 풍력발전 시스템에 도 효과적이다 [9, 10]. 또한, 육⸳해상 고정식 풍력발전 시스템과 달리 부유식 풍력발전 시스템은 피치 제어 시 음감쇠(Negative damping)도 고려해야 한다 [11].
하지만, 본 연구의 대상 풍력발전 시스템은 정격 이하 영역에서 공진 현상이 발생되므로 토크 제어에 적용되 는 드라이브트레인 댐퍼만 고려하였다 [12].
본 연구는 공진 회피 제어의 영향을 판단하기 위한 것이므로 공진 현상이 발생되는 대상 풍력발전 시스템 을 선정하였고, 시뮬레이션도 공진 현상이 자주 출현 되는 풍속 조건에서 수행하였다. 또한, 바다 환경은 제 어 알고리즘이 부유체에 미치는 영향을 검토하기 위하 여 파도가 존재하지 않는 조건으로 설정하였다.
2. 본 론
2.1 대상 풍력터빈
Fig. 1 Semi-submersible wind turbine
본 연구에서는 미국신재생에너지연구소(NREL: National Renewable Energy Laboratory)에서 제원을 공표한 반 잠수식 풍력터빈을 대상으로 하였다 [13]. 대상 풍력발 전 시스템은 DeepCwind 컨소시엄에서 제안한 하부구 조물에 NREL에서 제안한 5 MW 고정식 해상풍력터 빈을 결합한 형태로 구성되어 있다 [14].
Fig. 1 은 대상 풍력발전 시스템의 형상을 나타내고 있다. 그림에는 나타나지 않지만 계류시스템도 문헌에 제시된 것과 같이 모델링 되었다 [13].
Table 1 은 대상 풍력발전 시스템의 사양을 나타내
고 있다. 로터와 나셀은 NREL 5 MW 해상 고정식 풍
력터빈의 사양과 동일하지만 타워는 하부구조물이 수
면으로부터 10 m 높이에 위치하고 있어 기존 타워에
비하여 10 m 높이가 감소하였고, 기저부의 직경은 6
m에서 6.5 m로 증가되었으며, 두께는 35.1 mm에서 27
mm로 감소되었다. 이러한 타워의 재설계에 의하여 무
게가 약 28.1 % 감소되었다 [13, 14]. 또한, 타워의 기
저부가 고정된 것과 6자유도 운동을 하는 부유체 위에
설치되는 차이로 인하여 대상 풍력발전 시스템의 타워
1차 진동 모드 주파수는 NREL 해상 고정식 5 MW
풍력발전 시스템에 비교했을 때 0.32 Hz에서 0.42 Hz
로 증가되었다 [14]. 대상 풍력발전 시스템의 타워 1차
진동 모드 주파수 0.42 Hz는 캠벨선도(Campbell
diagram)해석과 타워 기저부의 자기스펙트럼밀도
Description Value Cut-in, Rated Rotor Speed [RPM] 6.9, 12.1
Gearbox Ratio [.] 97:1
Peak Power Coefficient [.] 0.482 Electrical Generator Efficiency [%] 94.4
Rotor Diameter [m] 126
Hub Height [m] 90
Elevation to Tower Base Above SWL [m] 10 Rated Generator Torque [Nm] 43,093 Rated Electrical Power [kW] 5,000
Blade Pitch Rate [deg/s] +8, -8
Nacelle Mass [kg] 240,000
Tower Mass [kg] 249,718
Platform Mass [kg] 13,473,000
Table 1 Wind turbine properties
(ASD: Auto Spectral Density)를 통해 도출되었다.
이는 타워의 공진 현상을 부추기는 결과를 초래하였으 며, 이 부분에 대한 자세한 내용은 다음 절에서 캠밸 선도를 통해 제시하였다.
2.2 캠밸 선도
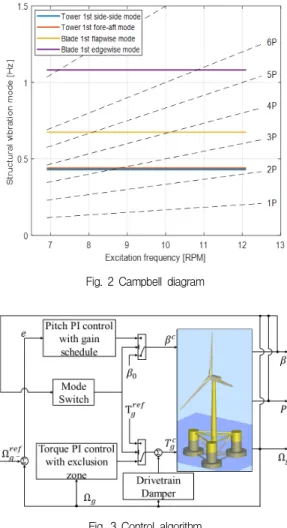
대상 풍력발전 시스템의 공진 문제를 분석하기 위 하여 DNVGL Bladed 4.9v을 통해 캠밸 선도를 작성하 였다. Fig. 2 는 가시성을 위하여 타워와 블레이드 1차 진동 모드만 표현한 캠밸 선도를 나타내고 있다. 블레 이드의 진동 모드 주파수는 로터 회전 주파수의 1배수 하모닉 성분에 가진되고, 본 논문의 주 관심사인 타워 의 진동 모드 주파수는 블레이드 수의 정수배인 3P 성 분의 하모닉 성분으로 가진된다. 캠밸 선도에서 확인 할 수 있듯이 본 논문의 대상 풍력발전 시스템은 약 8.7 RPM 부근에서 타워의 1차 진동 모드와 3P 주파수 가 일치하므로 공진 현상이 예상된다.
정상상태응답 상에서 해당 RPM으로 운전하는 풍속 대는 7-8 m/s로 정격 풍속 이하 영역 한 가운데에 위 치하고 있다. 만약 공진 회피 제어를 사용하지 않는다 면, 평균 풍속이 7.5 m/s인 사이트에서는 타워의 설계 수명 20년을 만족시키기 어려운 시스템임을 예상할 수 있다.
Fig. 2 Campbell diagram
Fig. 3 Control algorithm
이러한 경우 타워의 재설계나 TMD의 설치로 문제점 을 극복할 수 있지만, 경제성이 떨어질 수 있으므로, 본 논문에서는 제어 측면에서 접근하였다.
2.3 제어 알고리즘
본 연구에서 사용된 제어 알고리즘 구조는 Fig. 3
에 제시하였다. 피치 제어 루프에는 부유식 풍력터빈
의 음감쇠 특성을 고려하여 제어 게인을 선정하였고,
게인 스케줄링을 적용하였다. 하지만, 본 연구에서는
공진이 발생하는 정격 이하 영역에 대한 시뮬레이션만
다루므로 피치 제어가 수행되는 결과는 제시되지 않았
다. 따라서 피치 제어를 통해 구현되는 타워 댐퍼, 개
별 피치 제어, 피크 쉐이빙 등의 기계적 하중 저감 제
어 기술은 구현되지 않았으며, 토크 제어에 적용되는
Fig. 4 Torque control strategy
드라이브트레인 댐퍼만 적용하였다.
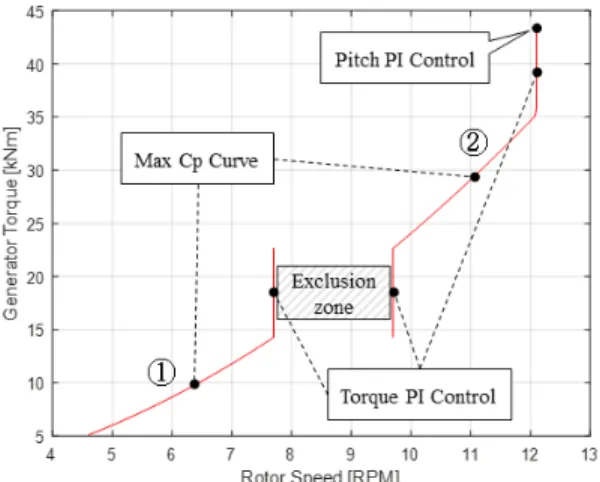
Fig. 4 를 통해서 토크 제어 전략을 확인할 수 있다.
공진 RPM을 회피를 위하여 제외 영역(Exclusion zone)을 의도적으로 만들어 놓았는데, 캠밸 선도를 통 해서 확인한 8.7 RPM을 기준으로
±1 RPM에 수직구 간이 놓인 것을 알 수 있다. 수직구간에 해당하는 RPM에 도달하면 PI 제어를 통해 해당 로터 회전속도 를 유지하기 위한 반력 토크 제어를 수행하며, 특정 반력 토크에 도달하면 토크를 급격히 낮추거나 올림으 로써 공진 주파수를 빠르게 벗어날 수 있다. 로터 회 전 속도가 공진 RPM보다 낮은 경우에는 수직구간이 하나 존재하는 ① 스케줄을 추종하며, 높은 경우에는 2 개의 수직구간이 존재하는 ② 스케줄대로 제어를 수행 하도록 설계하였다.
반력토크 제어 지령은 ① 구간에서 수직 구간 이전 에는 식 (1)과 같이 최대효율 곡선을 유지하기 위한 반력토크가 지령되며, 7.7 RPM에 도달하면 식 (2)에 의해 해당 RPM을 유지하기 위한 PI 제어가 수행된다.
여기서 e는 수직구간에 해당하는 RPM과 측정 RPM과 의 오차를 의미한다.
(1)
(2)
마찬가지로 ② 구간에서는 수직구간 9.7 RPM과 정 격 12.1 RPM에서 식 (2)을 통해 해당 RPM을 유지하 기 위한 반력토크가 지령되며, 그 사이는 식 (1)에 의
해 최대효율 곡선을 유지하기 위한 제어를 수행한다.
또한, 정격 RPM에 도달하고 정격 발전량에 도달하면 정격 반력 토크를 유지한 채 피치 PI 제어가 수행된다.
전체적으로 봤을 때 최대효율 곡선을 벗어나는 구 간이 있기 때문에 발전량 측면에서는 손실이 예상된다.
3. 시뮬레이션
3.1 시뮬레이션 조건
시뮬레이션은 공진 현상을 뚜렷하게 제시하기 위하 여 공진 RPM이 자주 출현되는 평균 풍속 7 m/s, 난 류 강도 18.6 %의 낮은 난류 풍속 조건에서 600 초 수 행되었다. 또한, 해상 상태는 파도의 영향을 제외하기 위하여 파도 존재하지 않는 잔잔한 바다(Calm sea) 조 건으로 설정하였다. 시뮬레이션 결과에 대한 성능 지 표는 풍력터빈 운전 상태와 타워 기저부의 굽힘 모멘 트로 선정하였으며, 제어 알고리즘 변경에 따른 부유 체 운동, 계류선 장력을 확인하였다.
3.2 시간 영역 결과
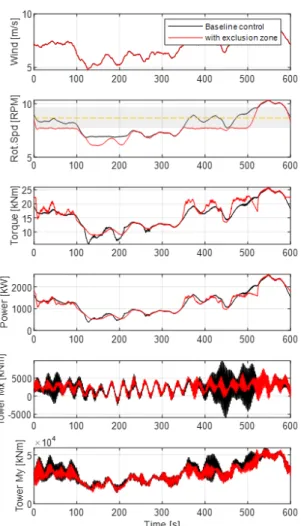
Fig. 5 는 공진 회피 제어의 적용 전⸳후에 대한 풍 력터빈 운전 상태와 타워 기저부의 굽힘 모멘트 시계 열 결과를 나타내고 있다. ‘Baseline control’은 드라이 브트레인 댐퍼만 적용된 상태이며, ‘with exclusion zone’은 드라이브트레인 댐퍼와 공진 회피 제어가 적 용되어 있다. 피치 각은 적용 전⸳후가 동일하게 최대효 율 피치 각(
)으로 동일하게 유지하므로 그림에는 제 시하지 않았다. 로터 회전속도의 경우 공진 회피 제어 를 수행하지 않을 때는 공진이 발생하는 8.7 RPM 부 근에서 운전 중임을 확인할 수 있다. 하지만 공진 회 피 제어를 수행했을 때는 해당 RPM에 도달하지 않도 록 7.7 RPM을 유지하기 위해 PI 제어를 통해 반력 토 크를 조절 중임을 확인할 수 있다. 공진 회피 제어를 통해 0 초에서 100 초 사이, 350 초에서 530 초 사이 에서 타워의 좌⸳우 방향(Side-side, Tower Mx), 전⸳후 방향(Fore-aft, Tower My)의 굽힘 모멘트 진동 성분 의 진폭이 크게 저감 됨을 확인할 수 있다.
Fig. 6 은 공진 회피 제어의 적용 전⸳후에 대한 부
유체 6자유도 운동과 계류선 장력을 시계열로 나타내
고 있다.
Fig. 5 Operation condition of wind turbine
대부분의 부유체 운동은 적용 전⸳후에 대하여 유의 미한 차이가 보이지 않았으며, 피치 운동의 경우만 공 진 회피 제어를 적용했을 때 근소하게 저감되는 것으 로 나타났다. 계류선의 장력은 저주파수라 명확하진 않지만 공진 회피 제어를 통해 근소하게 저감되는 경 향을 보이고 있다.
시계열 데이터에 대한 정량적 비교 결과는 3.4절에 서 구체적으로 다루었다.
3.3 주파수 영역 결과
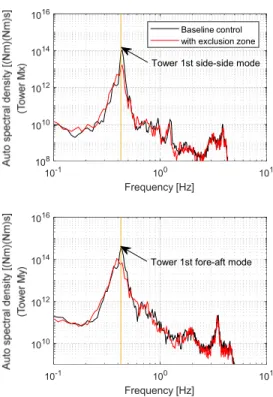
본 논문의 주요 하중요소인 타워의 굽힘 모멘트 성 분에 대한 자기 스펙트럼 밀도를 Fig. 7 에 제시하였 다. 공진 회피 제어를 적용하였을 때 타워 기저부의 좌⸳우, 전⸳후 방향 굽힘 모멘트의 ASD에서 타워 1차
S u rg e [ m ] S w a y [ m ] H e a v e [ m ] R o ll [d e g ] P it c h [ d e g ] Y a w [ d e g ] M o o r. te n s .1 [k N ] M o o r. te n s .2 [k N ] M o o r. te n s .3 [k N ]
Fig. 6 6-degrees of freedom motion and mooring line tensions
Description Baseline control (A)
with exclusion zone (B)
(B-A)/A [%]
Rotor speed Std.Dev.
[RPM] 1.02 1.03 1.53
Mean Rotor speed
[RPM] 8.12 7.67 -5.62
Power Std.Dev. [kW] 534.62 527.44 -1.34 Mean Power [kW] 1,267.32 1,240.78 -2.09 Max. Tower Mx [kNm] 9,888.63 7,728.83 -21.84 Max. Tower My [kNm] 57,278.7 56,142.4 -1.98 Tower Mx DEL [kNm] 5,720.30 2,971.50 -48.05 Tower My DEL [kNm] 12,943.1 10,639.8 -17.80
Surge [m] 3.69 3.58 -2.09
Sway [m] -0.01 -0.01 -2.82
Heave [m] -8.00 -8.00 -0.00
Roll [deg] 0.10 0.10 3.54
Pitch [deg] 1.42 1.37 -4.06
Yaw [deg] 0.05 0.05 0.30
Mooring tension 3 [kN] 1,322.60 1,315.57 -0.53 Table 2 Quantitative comparison
10 -1 10 0 10 1
Frequency [Hz]
10 8 10 10 10 12 10 14 10 16
Baseline control with exclusion zone
10 -1 10 0 10 1
Frequency [Hz]
10 10 10 12 10 14 10 16
Tower 1st side-side mode
Tower 1st fore-aft mode
Fig. 7 Auto spectral density
진동 모드는 각각 84.3 %, 88.9 % 감소하였다.
구조물에 걸리는 하중 진동 성분이 감소하는 것은 손 상등가하중(DEL: Damage Equivalent Load)의 감소를 의미하므로 피로하중 측면에서 유리함을 예상할 수 있 다.
3.4 정량적 결과 비교
3.2절에 제시된 시계열 데이터에서 제어 알고리즘의 성능을 판단할 수 있는 지표와 부유체 6자유도 운동, 계류선 장력을 Table 2 에 정량적으로 비교 분석하였 다. 풍력터빈의 운전 상태에서는 로터 회전속도, 발전 량, 타워 기저부의 굽힘 모멘트에 대한 결과를 제시하 였으며, 부유체에서는 6자유도 운동과 가장 큰 장력이 발생하는 풍력터빈 정면 방향 계류선에 대하여 공진 회피 제어 적용 전⸳후에 대하여 제시하였다.
로터 회전 속도의 표준편차는 1.53 % 증가하였으며, 평균은 5.62 % 감소되었다. 공진 회피 제어의 적용으 로 최대효율 곡선을 벗어나는 영역이 존재하기 때문에 평균 발전량은 2.09 % 감소되었으며, 표준편차는 1.34
% 감소하였다.
본 논문의 핵심 성능 지표인 타워 기저부 굽힘 모 멘트의 좌⸳우, 전⸳후 방향에 대한 최대 값은 각각 21.
84 %, 1.98 % 감소되었으며, DEL은 좌⸳우, 전⸳후 방향 에 대하여 각각 48.05 %, 17.80 %로 대폭 감소하였다.
공진 회피 제어의 효과가 좌⸳우 방향에 더 효과적임을 알 수 있다.
부유체 6자유도 운동의 경우 저주파수로 운동하는 Surge, Sway는 각각 2.09 %, 2.82 % 감소되었고, Heave는 오차가 거의 발생하지 않았다. 해양 조건을 파도가 존재하지 않는 잔잔한 바다로 설정하였기 때문 으로 판단된다. Roll은 3.54 % 증가하였지만 그 크기가 Pitch에 비교하여 상대적으로 크지 않았다. 부유체 안 정성을 평가하는데 핵심 성능 지표인 Pitch는 4.06 % 감소되어 긍정적인 영향을 미치는 것으로 판단된다.
마지막으로 풍력터빈 정면 방향에 위치한 계류선의 장력의 경우도 0.53 % 근소하게 감소되었음을 확인할 수 있다.
공진 회피 제어가 부유체 6자유도 운동과 계류선
장력에 미치는 영향을 통계적으로 비교하기 위해서는
시뮬레이션 시간을 최소 1시간 이상 수행하여야 유의
미한 결과를 얻을 수 있을 것으로 판단된다.
4. 결 론
본 연구에서는 타워의 공진 현상이 발생하는 부유 식 풍력발전 시스템에 공진 회피 제어 알고리즘을 설 계하고, 이를 적용했을 때 타워 기저부에 발생하는 기 계적 하중이 정량적으로 어느 정도 감소하는지를 시뮬 레이션을 통해 제시하였다. 시뮬레이션은 DNVGL Bladed 4.9 버전을 활용하여 공진 RPM이 자주 출현하 는 풍속 조건에서 수행되었으며, 해상 조건은 공진 회 피 제어 기술에 대한 영향만 확인하기 위하여 파도가 존재하지 않는 환경으로 하였다.
결과에 대한 분석은 시간 영역 결과와 주파수 영역 결과, 정량적 비교 결과를 통해 수행하였다. 핵심 성능 지표인 타워 기저부의 최대하중과 피로하중은 공진 회 피 제어를 적용했을 때, 좌⸳우 방향 굽힘 모멘트는 각 각 21.84 %, 48.05 %, 전⸳후 방향 굽힘 모멘트는 각각 1.98 %, 17.80 % 감소하였다. 공진 회피 제어가 좌⸳우 방향의 진동 성분을 저감하는데 효과적임을 알 수 있 었으며, 공진 RPM을 최대한 머무르지 않도록 하여 공 진 현상의 출현 빈도를 줄였기 때문으로 판단된다. 단, 최대효율 곡선을 일정 부분 벗어났기 때문에 평균 발 전량은 2.09 % 감소되는 결과를 확인하였다.
부유식 풍력발전 시스템은 검증 과정을 충분히 거 친 부유체에 상용 해상 풍력터빈을 결합시키는 형태로 설계되므로 이러한 타워의 공진 문제는 대부분 발생할 수 있으며, 이는 타워의 재설계를 통해 근본적으로 해 결할 수 있다. 하지만 본 연구에서는 제어 측면에서 접근하여 공진 현상 문제를 완화하였다.
비록 본 논문에서는 풍력터빈에 초점을 맞추어 10 분의 시뮬레이션 시간으로 수행하고, 해상 조건을 반 영하지 않았으므로 공진 현상이 부유체 거동에 미치는 영향은 결론 내릴 수 없다고 판단하였다.
향후 연구에서는 이러한 한계점을 고려하여 다양한 시뮬레이션 조건에서 효과를 확인할 계획이며, 정격 이하 영역에서 일반적으로 사용되는 기계적 하중 저감 기술인 드라이브트레인 댐퍼, 공진 회피 제어를 제외 한 새로운 제어 기술에 대한 연구를 수행할 예정이다.
후기
본 연구는 2019년도, 2020년도 산업통상자원부의 재 원으로 한국에너지기술평가원(KETEP)의 지원을 받아 수행한 연구입니다. (No.20193010025810, No.20203040020020)
또한, 본 논문은 2020년 추계 풍력에너지학회에서 발 표되었습니다.
참고문헌