헬리콥터 주로터 조종 시스템 회전형 스와시플레이트 피로 안전수명 평가
§김동철*†· 이판호* · 강신현* · 최영돈**· 김태주***
* 현대위아(주), ** 고려대학교 기계공학과, ***한국항공우주연구원
Fatigue Safe Life Evaluation of Rotating Swashplate of Helicopter Main Rotor Control System
Dong Chul Kim*†, Pan Ho Lee*, Shin Hyun Kang*, Young Don Choi** and Tae Joo Kim***
* HYUNDAI WIA Corporation
** Dept. of Mechanical Engineering, Korea Univ.
*** Korea Aerospace Research Institute
(Received April 12, 2011; Revised November 22, 2011; Accepted November 24, 2011)
- 기호설명 - F Static : 정적하중
F Dynamic : 동적하중 Fty : 항복강도 F.L.L : 피로한도 하중 HCF : 고주기 피로 사이클
K : 하중 증가 계수 LCF : 저주기 피로 사이클 M.S.F : 피로한도에 대한 안전율 R : 하중비(R=FMax/FMin) S∞ : 피로한도
αA : 하중 적용 기울기 각도
σeq : 등가응력
σSTA : 정적응력
σDYN : 동적응력
σ∞ : 안전곡선 피로한도 ω : 회전위상각도
Key Words : Fatigue Safe Life(피로 안전 수명), Fatigue Test(피로 시험), Main Rotor Control(주로터 조종), Pitch Rod Assy(피치로드 조립체), Rotating Swashplate(회전형 스와시플레이트)
초록: 주로터 조종 시스템은 헬리콥터의 추력 및 조종력을 담당하는 헬리콥터의 핵심 구성품이다. 주로 터 조종 시스템은 스와시플레이트 조립체, 시져 조립체, 피치로드 조립체, 가이드 등으로 구성되어 있으 며 추력 및 조종력 등 다양한 하중에 견디고 최적화된 피로 안전 수명을 만족시켜야 한다. 이 시스템 구성품 중 회전형 스와시플레이트는 피치로드 하중과 회전형 시져 하중에 지배적인 영향을 받는 핵심 구성품이다. 본 논문에서는 주로터 조종 시스템의 회전형 스와시플레이트 구성품에 대하여 피로 시험과 FEM 결과 비교를 통해 결과의 정확성을 입증하고, 이를 기반으로 수명을 평가하여 피로 안전수명을 도 출하였다.
Abstract: The main rotor control system is an important structural part of a helicopter that manages the thrust and control force of the helicopter. The main rotor control system consists of a swashplate assembly, scissor assembly, pitch rod assembly, guide, etc. The main rotor control system must endure various loads, such as the thrust and control force, and must meet the optimized fatigue safety life. The rotating swashplate is an important structure influenced by the pitch rod load and rotating scissor load. In this paper, the accuracy of a result about the rotating swashplate part of the main rotor control system is proven through comparison between fatigue test and FEM results. Based on this result, we estimate the lifetime and deduce the fatigue safe lifetime.
§ 이 논문은 2011 년도 대한기계학회 CAE 및 응용역학부문 춘계학술대회(2011. 4. 14.-15., SETEC) 발표논문임
† Corresponding Author, [email protected]
© 2012 The Korean Society of Mechanical Engineers
1. 서 론
헬리콥터는 로터 시스템과 함께 블레이드를 회전 시켜서 양력을 얻어 비행하는 형식의 항공기를 가리 킨다. 헬리콥터는 일반적인 고정익 항공기와는 달리 회전하는 로터 시스템에서 대부분의 양력 및 추력을 얻는다. 헬리콥터는 형태에 따라 하나의 주로터 (Main Rotor) 와 하나의 꼬리로터(Tail Rotor)를 갖는 단식 주로터 헬리콥터(Conven-tional Helicopter)와 두 개의 앞뒤 주로터를 가지는 탠덤(Tandem) 헬리콥터, 두 개의 좌우 주로터를 가지는 사이드 바이 사이드 (Side by Side) 헬리콥터 등이 존재한다. 또한 추력을 증가시키기 위한 보조장치를 부착한 복합형 헬리콥 터(Compound Helicopter)와 양쪽 블레이드에 배치된 로터를 비행 중에 기울일 수 있는 틸트 로터(Tilt rotor) 등이 존재한다. 이렇게 주로터 조종 시스템은 헬리콥터의 핵심 부품으로 스와시플레이트 조립체, 시져 조립체, 피치로드 조립체, 가이드 등으로 구성 되어 있으며 추력 및 조종력등 다양한 하중에 견디 고 최적화된 피로 안전 수명을 만족시켜야 한다. 이 시스템 구성품 중 회전형 스와시 플레이트는 피치로 드 하중과 회전형 시져 하중에 지배적인 영향을 받 는 핵심 구성품이다. Shim 등(1) 은 연구 결과를 통해 헬리콥터 로터 스와시 플레이트 정적 시험을 위한 치구 설계 시험 활용 방안의 예를 제시하였으며, Oh 등(2) 은 헬리콥터 주로터 조종 중 회전형 스와시 플 레이트와 비회전 스와시 플레이트의 정적 구조시험 및 절차 방법을 제시하였다. 그러나 주로터 조종 구 성품과 관련하여 구조, 피로해석 결과와 시험 결과 와의 정확성 입증 및 피로 안전수명 도출에 관한 연 구는 미비한 실정이다. 본 논문에서는 주로터 조종 시스템 중 핵심 구성품인 회전형 스와시플레이트 구 성품에 대하여 피로 시험과 FEM 결과 비교하여 결 과의 정확성을 입증하고, 이를 기반으로 수명을 평 가하여 피로 안전 수명을 도출하고 개발 연구 기반 을 확립하고자 한다.
2. 본 론
2.1 회전형 스와시플레이트 구조
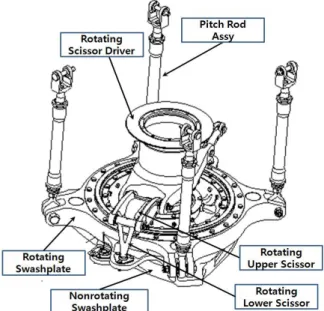
주로터 조종 시스템은 크게 회전형 스와시플레 이트, 비회전형 스와시플레이트 회전형 시져, 비회 전형 시져, 피치로드 조립체 등으로 구성되어 있 다. Fig. 1 은 주로터 조종 시스템의 형상을 나타낸 것이다. Fig. 2 는 주로터 조종 시스템 중 핵심 구 성품인 회전형 스와시플레이트의 형상을 나타낸
Fig. 1 Main rotor control system configuration
Fig. 2 Rotating swashplate configuration 것이다. 회전형 스와시플레이트는 추력, 조종력 등 의 복합적 하중 중에서 피치로드 하중과 회전형 시져 하중에 지배적인 영향을 받는 핵심 구성품이 다. 본 연구에서 개발하고자 하는 회전형 스와시 플레이트의 설계 요구 수명 시간은 운행 시간 기 준 5,000 시간 이상을 만족하여야 한다. 그림에 표 시된 동그라미 영역은 Fretting 영역으로 러그에 해당된다. 러그는 헬기 힌지점에서 힘의 전달을 주고 받는 역활을 하는 부분으로 다른 부품과 조 립되어 Fretting 영향이 나타날 수 있는 부분이다.
Fretting 영역을 제외한 나머지 부분은 Without Fretting 영역에 해당된다.
Load
Number Load Case Remarks
1 F1 Static (N) + K [F1 Dynamic X cos (ω X t )] (N)
Pitch rod load 2 F1 Static (N) + K [F1 Dynamic X cos (ω X t+90 )] (N)
3 F1 Static (N) + K [F1 Dynamic X cos (ω X t+180 )] (N)
4 F1 Static (N) + K [F1 Dynamic X cos (ω X t-90 )] (N)
5 F2 Static (N) ± K X F2 Dynamic
Rotating scissor load
6 - (F2 Static (N) ± K X F2 Dynamic) Fixed Area
F Static : Static load , F Dynamic : Dynamic load, K : Load increment factor, ω : Rotating Phase Angle , αA : Applied Load Tilt Angle
N : Load Unit
Fig. 3 Rotating swashplate load conditions(1 phase) 2.2 회전형 스와시플레이트 하중 조건
Fig. 3 은 회전형 스와시플레이트 하중 방향을 나타낸 것이며, Table 1 은 회전형 스와시 플레이트 에 적용되는 하중 값을 수식화 하여 나타낸 것이 다. 그림에 나타난 바와 같이 회전형 스와시플레 이트는 피치로드 하중과 시져 하중을 받고 있으며 특히 4 개의 러그에 작용되는 피치로드 하중에 지 배적인 영향을 받는다.
2.3 유한요소법 적용 및 해석 결과 2.3.1 유한요소 모델링
Fig. 4 는 구조해석을 위한 3 차원 모델링을 나타 낸 것으로 그림(a)는 주로터 조종 조립체, 그림(b) 는 조립체 중 회전형 스와시플레이트를 나타낸 것 이다. 구조해석은 다물체 구조해석 프로그림인 SAMCEF 6.1 상용프로그램을 사용하여 해석을 수 행하였다. Fig. 5 는 격자를 나타낸 것이며 격자 형 태는 2 차 사면체 요소를 적용하였다.
No. Item Number of nodes Number of
Elements
1 Rotating Swashplate 49,332 28,625
2 Nonrotating
Swashplate 215,857 135,178
3 Outer retainer 12,742 6,209
4 Inner retainer 10,906 5,248
5 Outer Shim 3,787 1,540
6 Inner Shim 2,918 1,140
7 Outer
Bushing 6,228 2,982
8 Inner Bushing 7,498 3,660
9 Bearing 7,755 3,881
10 Total 317,023 188,463
Table 3 Material property summary table
No Item
Modulus of Elasticity
(GPa)
Poisson Ratio
Yield Strength
(MPa) Ultimate Strength (MPa)
Mean Fatigue Limit (MPa)
1 AL7175 70.33 0.33 434 503 120
2 AISI4340 200 0.32 758 1027 362
Table 4 Material of main rotor swashplate assy
No. Item Component name Remarks
1 AL7175
Rotating Swashplate Nonrotating Swashplate
Outer Shim Inner Shim
2 AISI4340
Outer retainer Inner retainer OuterBushing Inner Bushing
Bearing
(a) (b)
Fig. 4 Modeling of main rotor control assy and rotaing swashplate
Fig. 5 Mesh of main rotor control assy and rotaing swashplate
Table 2 는 주로터 조종 조립체 격자 개수를 나 타낸 것이며 총 188,463 개의 요소를 사용하였다.
이중 회전형 스와시플레이트의 격자 개수는 49,332 개의 요소를 사용하였다. Table 3 은 해석에 필요한 물성치를 나타낸 것이며, 물성치는 MIL- HDBK-5H 에 명시된 규격을 사용하였다. 본 연구 대상인 회전형 스와시플레이트 재질은 AL7175 재 질을 사용하였다.
2.3.2 경계조건
주로터 조종 시스템은 피치로드 하중, 액츄에이 터 하중, 회전형 및 비회전형 시져 하중 등 복합 적인 하중이 작용되는 메커니즘을 가지고 있다.
따라서 회전형 스와시플레이트의 물리적 메커니즘 을 획득하기 위해 회전형 스와스플레이트 구성품 을 독립적으로 해석하면 물질의 본질적 거동 및 특성들을 정확히 파악하기가 어렵다. 따라서 주로 터 조종 시스템은 주요 구성품들이 조립된 상태인 다물체 구조해석을 수행하여야 각 구성품에 대한 정확한 물리적 특성을 파악할 수 있다. 따라서 본 연구에서는 주로터 조종 시스템을 조립체 상태로 해석한 다물체 구조해석을 수행하였다. 각 구성품 에 접촉 면적은 접촉조건(Contact condition)을 적용 하였다. 연구 대상인 회전형 스와시플레이트 구성 품은 피치로드 및 회전형 시져 하중을 적용하였고, 엑츄에이터 하중이 적용되는 비회전형 스와시플레 이트 러그부에는 회전방향으로의 시험 고정 역할 및 회전 방향으로 동일한 하중을 적용하기 위해 고정부(Fixed part)를 적용하였다. 또한 피치로드 하 중이 회전시 적용되는 효과를 적용하기 위해 Fig.
3 및 Table 1 과 같이 각 러그에 코사인(Consine) 곡선의 위상차 하중을 적용하였다. 또한 실제 주 로터 조종 시스템은 조종력 제어 역할을 하기 때 문에 회전형 스와시플레이트 러그에 적용하는 피 치로드 하중은 일정한 각도로 지속적으로 작용되 지 않고 일정한 범위 이내에서 각도가 실시간으로 변화하며 작용된다. 따라서 비행 조건 중 주로터 조종 시스템에 가장 치명적인 조건이 작용된 실제 기울기 각도 αA 를 동시에 적용하여 하중을 부가 하였다.
2.3.3 해석 결과
Fig. 6 과 Fig. 7 은 회전형 스와시플레이트 구성 품의 취약 영역(Critical area) 및 취약 영역에서의 응력 값을 나타낸 것이다. 그림에서 알 수 있듯이 Without fretting 영역인 몸체 영역에서 응력 집중이 발생됨을 알 수 있다.
Fig. 6 Critical point area of rotaing swashplate and Max.
principle stress
Fig. 7 Critical point area of rotaing swashplate and Min.
principle stress
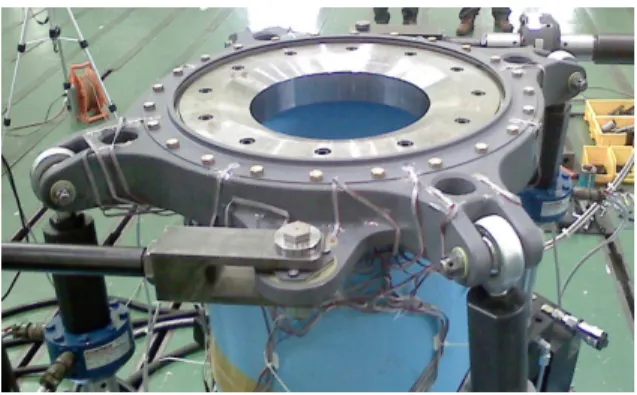
Fig. 8 Fatigue test equipment for rotating swashplate
이것은 피치로드 하중이 러그 영역에 적용됨에 따라 인장 및 압축 하중이 작용하여, 축하중 및 굽힘모멘트가 작용되어 회전형 스와시플레이트 몸 체에 응력이 집중되는 것이다
본 구성품은 회전체로 대칭 형상이기 때문에 시 스템 특성상 최대 주응력 지점이 발생하면(Fig.
6) 대칭 기준으로 반대편 같은 위치(Fig. 7) 지점에 최소 주응력이 발생하게 된다. 이렇게 각 그림에 서 표시된 부분은 대칭 영역이면서 반복 인장 및 압축 하중에 의하여 취약 지점이 발생되게 되며, Fig. 6 과 Fig. 7 에서와 같이 취약 부분(Critical point)에서 파손이 예측되었다.
Fig. 9 Fatigue test load condition for rotating swashplate (R= - 0.62)
Fig. 10 Fatigue test results for rotating swashplate
2.4 피로시험 및 결과 2.4.1 시험 방법
Fig. 8 은 회전형 스와시플레이트 피로시험 장치 를 나타낸 것이고, Fig. 9 는 피로시험 하중 값을 나타낸 것이다. 피로하중 값은 정적 하중(Static Load)이 압축 하중 상태로 작용된 상태에서 동적 하중(Dynamic Load)을 적용하여 조합된 하중을 러 그에 부과하였다. FMax는 12,101N 이며 FMin는 - 19,443N 으로 피로 반복 하중이 적용되었다. 시험 시 일정 사이클 수에서 파손이 되지 않을 경우 Table 1 에 나타낸 바와 같이 동적 하중 계수 (K) 값을 적용하여 피로 가속화 시험을 단계적으로 수 행하였다. 피로 시험은 S-N 피로 시험법을 채택하 였다. S-N 피로 시험법이란 해당 구성품의 피로 물성치 등 피로 특성치 값을 획득할 목적으로 파 괴가 일어날 때 까지 시험을 수행하는 방법이다.
획득된 피로물성치의 통계적 분석을 통하여 파손 확률이 3σ 이하가 될 수 있는 Safe S-N curve 를 생 성한 후, 하중스펙트럼에 대해 누적 손상을 계산
swashplate
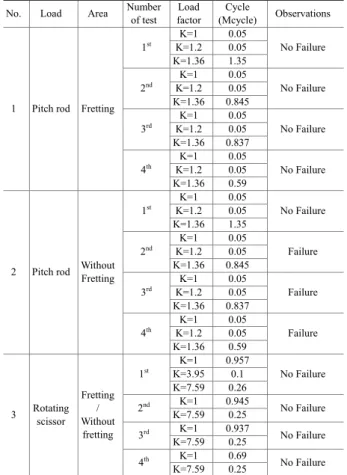
No. Load Area Number of test
Load factor
Cycle
(Mcycle) Observations
1 Pitch rod Fretting 1st
K=1 0.05
No Failure K=1.2 0.05
K=1.36 1.35
2nd
K=1 0.05
No Failure K=1.2 0.05
K=1.36 0.845
3rd
K=1 0.05
No Failure K=1.2 0.05
K=1.36 0.837
4th
K=1 0.05
No Failure K=1.2 0.05
K=1.36 0.59
2 Pitch rod Without Fretting
1st
K=1 0.05
No Failure K=1.2 0.05
K=1.36 1.35
2nd
K=1 0.05
Failure K=1.2 0.05
K=1.36 0.845
3rd
K=1 0.05
Failure K=1.2 0.05
K=1.36 0.837
4th
K=1 0.05
Failure K=1.2 0.05
K=1.36 0.59
3 Rotating scissor
Fretting / Without
fretting 1st
K=1 0.957
No Failure K=3.95 0.1
K=7.59 0.26
2nd K=1 0.945
No Failure K=7.59 0.25
3rd K=1 0.937
No Failure K=7.59 0.25
4th K=1 0.69
No Failure K=7.59 0.25
하고 선형손상법칙(Miner's rules)(3) 에 따라 피로 수명을 계산하였다.
2.4.2 시험 결과
Fig. 10 은 회전형 스와시플레이트 피로 시험 후 구성품의 파손 형태 및 위치를 나타낸 것이며, Table 5 는 피로시험 결과 값을 표로 정리한 것이 다. 해석을 통해 Fig 10 에 표기된 #21 지점 혹은
#9 지점에서 파손이 예측되었고, 실제 시험에서
#21 지점에서 파손이 발생되어 해석의 타당성을 입증하였다. 따라서 #21 및 #9 지점 이 대칭 영역 이면서 각각 취약 영역 임을 알 수 있다. 또한 피 치로드 하중에 영향을 미치는 몸체 영역에서 파손 이 발생되었기 때문에 회전형 스와시플레이트는 회전형 시져 하중 보다 피치로드 하중에 지배적인 영향을 받는다는 것을 알 수 있었다. 또한 러그 등 Fretting 영역 보다는 몸체인 Without fretting 영 역에서 좀더 구조 및 피로특성적으로 취약함을 알 수 있다. 이 결과를 통해 피치로드 하중에 의한 굽힘모멘트가 회전형 스와시플레이트에 치명적인 영향을 준다는 것을 알 수 있었다.
2.5 해석 및 피로시험 결과의 신뢰성 입증 Fig. 6, Fig. 7 의 구조해석 결과와 Fig 10 의 피로 시험 결과를 분석해 보면 해석에서 예측했던 취약 부위는 피로시험 확인 결과 일치함을 확인할 수 있었다. 이를 통해 조립체 해석인 다물체 구조해 석의 신뢰성을 입증할 수 있었다. 이러한 신뢰성 에 기반을 둔 다물체 해석 기법은 다양한 로터 시 스템 개발에 적용이 가능하게 되었다.
2.6 피로수명 평가
일반적으로 HCF 와 LCF 를 구분하는 Cycle 기 준이 약간씩 차이가 있으나 헬리콥터 피로수명 계 산 시 구분 기준은 106 cycle 이다. 또한 본 연구에 접근하고 있는 HCF 와 LCF 영역에서의 피로수명 예측 접근 방법은 차이가 있다. 회전 구성품에 의 해서 유발되는 로터 사프트, 블레이트, 댐퍼, 스와 시플레이트, 시져 등은 하중스펙트럼들이 저하중 고주기(HCF) 영역에서 피로 특성에 지배적으로 영향을 미친다. LCF 는 헬리콥터가 이륙, 비행, 착 륙의 기동 등 운용 조건에서, 전반적인 영향을 받 으며 고하중 저주기(LCF) 영역에 영향을 미친다.
따라서 피로수명 시, HCF 와 LCF 영역을 각각 나 누어 계산하며 각각을 합하여 실제 피로 수명을 예측하였다.
Fig. 11 은 회전형 스와시플레이트 구성품의 평 균 곡선(Mean curve)과 안전 곡선(Safe curve) 의 S- N curve 를 나타낸 것이다. Mean curve 는 재질 물성 치 특성에 관한 S-N curve 이며, 안전 곡선(Safe curve) 의 S-N curve 는 헬리콥터 설계상 안전 설계 를 위해 산포도 계수(Scatter factor), 표면 조도 계 수(Surface roughness factor), 표면 처리 계수(Surface treatment factor)등의 계수를 평균 곡선(Mean curve) 에 적용하여 생성된 curve 로 피로 해석 수명 도출 시 사용된다.
S-N curve 는 stromeyer equation 을 이용하여 생성 하였으며 식은 다음과 같다.
S / S∞ = 1 + A / Nα (1) where : S∞ = Fatigue limit
A, α = Coefficients depending on materials S∞ = S (Nf) (2) where Nf = 107 (Steel material)
Nf = 108 (Aluminum material)
회전형 스와시플레이트는 고주기(HCF, High Cycle Fatigue) 사이클과 저주기(LCF, Low Cycle Fatigue) 사이클에 각각 영향을 받으나, 특히 고주 기 사이클에 지배적인 영향을 받는다.
Fig. 11 AL7175 S-N curve of rotating swashplate
Fig. 12 AL7175 L-N curve of rotating swashplate
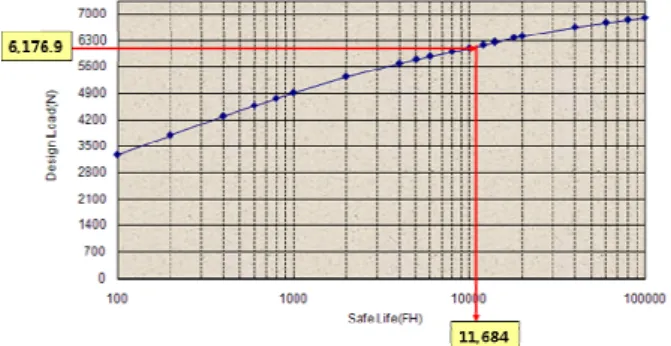
Fig. 13 Safe life and desidgn load curve of rotating swashplate for HCF safe life calculation
Fig. 14 S-N curve of rotating swashplate for LCF safe life calculation
각 주기에 대해 피로수명 평가를 수행한 후 조합 하여 계산하였다.
고주기(HCF, High Cycle Fatigue) 사이클에 대한 계산 내용은 다음과 같다. FEM 해석 결과를 통해 획득한 SM(Stress Multiplier)를 이용해 Static stress 와 Dynamic stress 를 구한 후, 식 (3)을 이용하여 Equivalent stress 값을 구한다.
σeq = σDYN / [1 - (σSTA / Fty)] (3) where σeq = Equivalent stress
σSTA = Static stress σDYN = Dynamic stress Fty = Yield Strength
Fig. 12 는 피로해석 시 수명을 계산하기 위해 S- N curve 를 L-N curve 로 변환하여 생성된 Curve 이 다. 하중 스펙트럼 및 요구 수명, 사이클수, % time, 안전계수 등이 결합되어 이를 선형 손상 법칙 (Miner's rules)(3) 적용을 통하여 Total damage=1 이 되는 L-N curve 및 Fatigue limit 을 획득하고 여기 서 Design Load 를 구한다. 여기서 Design Load 란 피로 요구 한계 수명에 지탱할 수 있는 하중으로 표현된 대표적인 피로한계 값을 말한다. Fig. 12 에 서 Solid triangle 로 표시된 데이터는 실제 헬기 운 용 하중을 각각 L-N curve 에 나타낸 것이며 각 하 중 스펙트럼에 대해 L-N curve 의 Safe curve 에 적 용하여 각각의 운용 조건에 Damage 를 획득하기 위한 것이다. 각 하중 별 획득된 Damage 를 모든 운용 조건에 대해 획득한 후 Miner rule 을 이용하 여 Total Damage 를 획득하고 이를 바탕으로 피로 수명을 예측하였다.
안전 피로 한계의 안전율은 식 (4)로부터 구할 수 있다.
M.S.F = ( σ∞ / σeq ) - 1 (4) where σ∞ = Safe curve fatigue limit
M.S.F = Margin of Safety for Fatigue limit F.L.L = Design Load X (1 + M.S.F) (5) where F.L.L= Fatigue limit Load
F.L.L(Fatigue limit Load) 은 실제 피로 한도에 지 탱할 수 있는 실제 피로 한계 하중을 말하는 것으 로 식 (5)를 통해 구한다. Fig. 13 은 고주기(HCF) 사이클 영역에서 피로수명 평가를 위해 Design Load 에 대응하는 Safe Life 값을 Curve 로 나타낸 것이다. 식 (5)로부터 구한 F.L.L 을 y 축에 적용하 여 고주기(HCF) 사이클 영역에서의 피로수명 값 을 획득하였다. 여기서 획득된 피로수명 값은
Fig. 14 는 저주기(LCF) 사이클 영역에서 피로수 명 평가를 위해 나타낸 S-N curve 이다. 저주기 사 이클 영역에서도 FEM 해석 결과를 통해 획득한 SM(Stress Multiplier) 를 이용해 Static stress 와 Dynamic stress 를 구한 후 식 (3)을 이용하여 Equivalent stress 값을 계산하였다. 이때 적용된 하 중은 하중스펙트럼에서 최대 정하중과 최대 동하 중을 적용하여 Static stress 와 Dynamic stress 및 Equivalent stress 값을 도출하는 것이기 때문에 고 주기 사이클 영역에서의 결과 값과는 다르다. 획 득된 Equivalent stress 값은 Fig. 14 의 S-N curve 의 y 축에 적용하여 대응되는 허용사이클 수(Allowable Mcycle) 를 획득한 후 식 (6)과 (7)을 이용하여 저 주기(LCF) 사이클 영역에서의 피로수명 값을 획득 하였다. 여기서 획득된 피로수명 값은 33,741hr 이 다.
LCF Safe Total Damage
= Required MCycle / Allowable MCycle (6) LCF Safe Life
= Required Fatigue Life / LCF Safe Total Damage (7) Total Safe Life = 1 / [ (1/HCF) + (1/LCF) ] (8) 고주기 및 저주기 사이클이 복합적으로 적용된 피 로 수명은 식 (8)을 통해 계산할 수 있으며, 여기 서 획득된 총 피로 안전 수명 값 8,678 시간 을 얻을 수 있었다. 따라서 설계 요구 조건인 5,000 시간 이상을 만족하여, 요구조건에 부합하는 회전 형 스와시플레이트를 개발하였다.
3. 결 론
주로터 조종 시스템의 구성품인 회전형 스와시 플레이트는 추력, 조종력 등의 복합적 하중 중에 서 피치로드 하중과 회전형 시져 하중에 지배적인 영향을 받는 핵심 구성품으로 피치로드 하중에 지 배적인 영향을 받으며 피치로드 하중에 의한 굽힘 모멘트가 회전형 스와시플레이트에 치명적인 영향 을 준다는 것을 알 수 있었다. 또한 러그 등 Fretting 영역 보다는 몸체인 Without fretting 영역 에서 좀더 구조 및 피로 특성적으로 취약함을 알 수 있다.
본 연구에서 다물체 구조해석의 접근 방법을 이 용해 구성품의 취약 부위를 예측할 수 있었다. 그 리고 피로 시험과 해석 결과 값의 비교 검증을 통
해 결과의 정확성을 입증할 수 있었다. 이를 통해 복합한 구성품의 다물체 구조해석 방법을 확립할 수 있었으며 피로수명을 HCF 와 LCF 를 각각 분 리하여 수명을 도출하는 피로 안전 수명 평가 방 법을 제시하였다. 이를 토대로 주로터 조종 시스 템 개발 시, 다물체 구조해석 적용한 해석의 응용 연구 기반을 확립하였으며, 확립된 계산 방법을 통해 피로 안전 수명 평가 적용이 가능하게 되었 다.
후 기
본 연구는 지식경제부 한국형헬기 민군겸용구성 품 개발 사업 수행의 결과 중 일부임.
참고문헌
(1) Shim, J.-Y., Oh, J.-M., Kim, T.-J., Kim, S.-J. and Kim,
S.-H., 2009, "Design of Test set-up for Helicopter Rotor Swashplate Structure Test," KSME 09CA052, pp.
230~233.
(2) Oh, J.-M., Shim, J.-Y. and Hwang, G.-C., 2009,
"Static structure Test for Main Rotor Swashplate of Helicopter," KSAS09-2222, pp.235~238
(3) Miner, M. A., 1945, "Cumulative damage in fatigue,"
Trans. ASME, J. Appl.Mech., Vol.12, pp.159~164 (4) Oh, M.-S., Kim, H. and Park, J., 2007, "A Study of
Fatigue Load for Rotor Blades of the Utility Helicopter," Proceedings of KSME Spring Annual Meeting 2007, pp.749~754.
(5) Kee, Y., Kim, S.-H., Jung, J.-K. and Heo, J.-W., 2010,
"Flaw Tolerant Safe Life Evaluation of Composite Rotor Blades," Proceedings of KSME Fall Annual Meeting 2010, pp. 489~494.
(6) Kim, S., Song, K., Choi, H., Kim, E. and Park, B., 2008, "Design of Whirl Tower Test Facility for Helicopter Rotor System," Proceedings of KSME Fall Annual Meeting 2008, pp.484~487.