Journal of Institute of Control, Robotics and Systems (2011) 17(4):295-298 DOI:10.5302/J.ICROS.2011.17.4.295 ISSN:1976-5622 eISSN:2233-4335
I. 서론
(robust)
(invariance) .
[1-3].
.
0 .
0 .
,
[4-6]. 2
.
.
0 .
DC motor .
문제 정의 II.
(canonical form)
2 .
* (Corresponding Author)
: 2010. 12. 19., : 2010. 12. 27., : 2010. 12. 29.
, , :
([email protected]/[email protected]/[email protected])
(1)
∈, ∈,
,
,
. , .
.
≦ ≦
(2)
,
(signum function) . (2)
1 . .
Design of Elliptical Sliding Surface Guaranteeing Finite Time Convergence
, , *
(Young-Hun Jo1, Yong-Hwa Lee1, and Kang-Bak Park1)
1Korea University
Abstract: Almost all of control methods proposed so far have been designed such that the overall system guarantees asymptotic stability. It implies that the output converges to zero but not reaches to zero in a finite time. In many actual cases, however, it is preferable to design the controller such that the output gets to zero in a finite time. In this paper, we proposed a novel elliptical sliding surface. To show the effectiveness of the proposed method, experimental results are given.
Keywords: elliptical sliding surface, SMC (Sliding Mode Control), finite time convergence
Copyright© ICROS 2011
-3 -2 -1 0 1 2 3
-3 -2 -1 0 1 2 3
x
x dot r
d
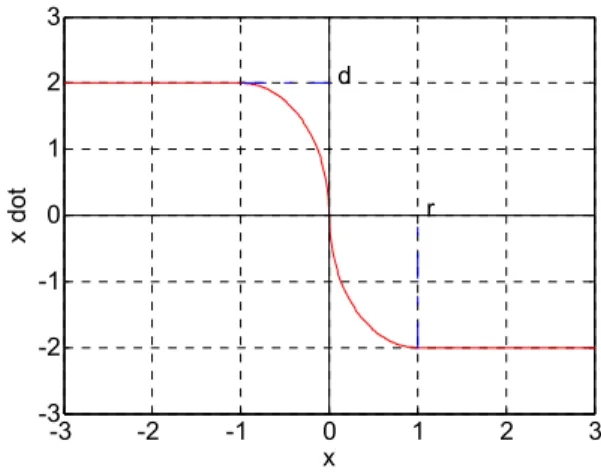
1. .
Fig. 1. The elliptical sliding surface.
296 조 영 훈 이 용 화 박 강 박, ,
(2) ,
0 .
.
제어기 설계 III.
, ,
0 .
정리 1: ,
, ,
.
: , (2) .
. (3) ,
(4)
. ,
.
(5)
■
,
. 0
.
정리 2: ,
, ≦ , 0 .
증명: ≦ , (2) .
(6)
,
() .
, (6) .
⇔
⇔
⇔
(7)
⇔
⇔
.
,
0 .
≦
(8)
■ (8)
,
.
,
(signum function)
.
정리 3: (1) ,
0 .
(9)
, ()
.
≦
(10)
증명: .
. (11)
, .
(12)
(12) , 0
() .
≦
(13)
. ≦ (11)
.
(14),
(6) .
.
유한 시간 수렴을 보장하는 타원형 슬라이딩 모드 제어기의 설계 297
(15)
(15) (14) ,
.
(16)
(11) (16) .
(13) ,
(5) ,
0 (8) ,
0 . ■
실험 결과 IV.
DC
. DSP TMS320F2812 ,
, , .
1 msec. ,
.
,
. 2
.
,
.
,
.
.
.
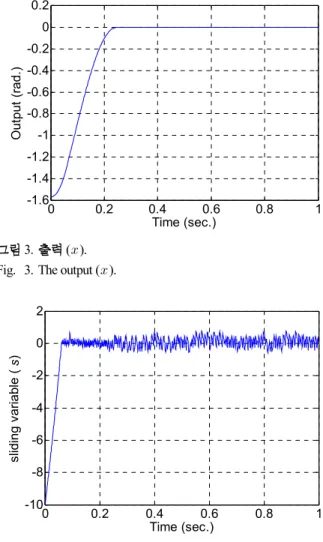
3 .
0 .
4
-1.6 -1.4 -1.2 -1 -0.8 -0.6 -0.4 -0.2 0 -2
0 2 4 6 8 10 12
output (rad.)
angular velocity (rad./sec.)
2. ( ).
Fig. 2. The phase portrait (conventional method).
0 0.2 0.4 0.6 0.8 1
-1.6 -1.4 -1.2 -1 -0.8 -0.6 -0.4 -0.2 0 0.2
Time (sec.)
Output (rad.)
3. ().
Fig. 3. The output ().
0 0.2 0.4 0.6 0.8 1
-10 -8 -6 -4 -2 0 2
Time (sec.)
sliding variable ( s)
4. ().
Fig. 4. The sliding variable ().
-1.6 -1.4 -1.2 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 -2
0 2 4 6 8 10 12
output (rad.)
angular velocity (rad./sec.)
5. .
Fig. 5. The phase portrait.
298 조 영 훈 이 용 화 박 강 박, ,
. ,
,
. 5
(signum function)
, ,
.
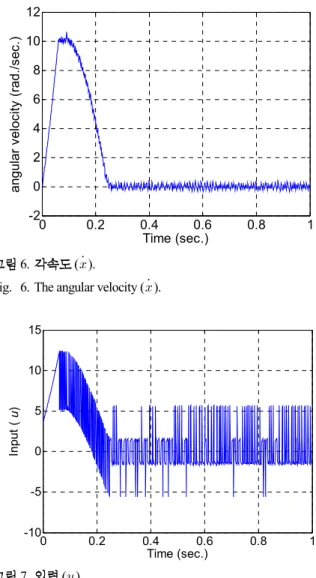
6 ,
, 0.05 ~ 0.1
.
7 .
.
V. 결론
.
0
. .
[1] V. I. Utkin, “Variable structure systems with sliding mode,” IEEE Trans. on Automatic Control, vol. 22, no.
2, pp. 212-222, Apr. 1977.
[2] J. Y. Hung, W. Gao, and J. C. Hung, “Variable struc- ture control: a survey,” IEEE Trans. on Industrial Electronics, vol. 40, no. 1, pp. 2-22, Feb. 1993.
[3] C. Edwards and S. K. Spurgeon, Sliding Mode Control, Taylor & Francis Ltd, 1998.
[4] M. Zhihong, A. P. Paplinski, and H. R. Wu, “A robust terminal sliding mode control scheme for rigid robotic manipulators,” IEEE Trans. on Automatic Control, vol.
39, no. 12, pp. 2464-2469, Dec. 1994.
[5] L. Wang, T. Chai, and L. Zhai, “Neural-network based terminal sliding-mode control of robotic manipulators in- cluding actuator dynamics,” IEEE Trans. on Industrial Electronics, vol. 56, no. 9, pp. 3296-3304, Sep. 2009.
[6] Y. Feng, J. Zheng, X. Yu, and N. V. Truong, “Hybrid terminal sliding-mode observer design method for a per- manent-magnet synchronous motor control system,” IEEE Trans. on Industrial Electronics, vol. 56, no. 9, pp.
3424-3431, Sep. 2009.
조 영 훈 2009
. 2009 ~
.
, .
이 용 화 2010
. 2010 ~
.
, .
박 강 박 1990
( ). 1992
(KAIST) (
). 1997 . 1997
~1999 2
. 1997 12 ~1999 2
(KIT) . 1999 3 ~
. , ,
, .
0 0.2 0.4 0.6 0.8 1
-2 0 2 4 6 8 10 12
Time (sec.)
angular velocity (rad./sec.)
6. ().
Fig. 6. The angular velocity ().
0 0.2 0.4 0.6 0.8 1
-10 -5 0 5 10 15
Time (sec.)
Input ( u)
7. ().
Fig. 7. The input ().