Journal of Institute of Control, Robotics and Systems (2015) 21(5):490-495
http://dx.doi.org/10.5302/J.ICROS.2015.15.0018 ISSN:1976-5622 eISSN:2233-4335
실내 비행 로봇을 위한 WPAN 기반 자가 측위 시스템 개발
Development of a WPAN-based Self-positioning System for
Indoor Flying Robots
임 정 민, 정 원 민, 성 태 경*
(Jeong-Min Lim
1, Won-Min Jeong
2, and Tae-Kyung Sung
2,*)
1Institute of Technology, WiFive Co. Ltd.
2Isan Solution
3Department of Information and Communication, Chungnam National University
Abstract: As flying robots are becoming popular, there are increased needs to use themforsuch purposes as parcel delivery, serving in restaurants, and stage performances. To control flying robots such as quad copters, localization is essential. In order to properly position flying robots, many techniques are in development, including IR (infra-red)-based systemswhich catch markers on a flying robot in order that it can position itself. However, this technique demonstrates only short coverage. Furthermore, localization from inertial sensors diverges as time passes. For this reason, this paper suggests a TWR (two-way ranging) based positioning technique.
Despite the weaknesses in currently available TWR system, this paper suggests a self-positioning and outlier detection technique in order to provide reliable position information with a faster update rate. The self-positioning system sends a shorter message which reduces wireless traffic. By detecting and removing outlier measurements, a positioning result with better accuracy is acquired.
Finally, this paper shows that the suggesting system detects outlierssequentially from less than half the number of anchors in localization system according to the degree of outlier in measurement and the noise level. By performing an outlier algorithm, better positioning accuracy is acquired as shown in the experimental result.
Keywords: flying robots, ranging system, outlier detection method
I. 서론
최근 UAV (Unmanned Air Vehicle)의 기술 발전과 더불어 쿼 드콥터와 같은 비행로봇이 대중화되고 있다. 또한 이들을 이 용하여 택배, 식당주문, 그리고 비행로봇 공연등과 같은 다양 한 시장 발굴을 위한 노력이 계속되고 있다. 이들 비행로봇 의 제어를 위해서는, 신뢰성이 높고 고정밀의 측위 기술이 필수적이다. 기존의 실내 로봇의 측위에 관련한 연구들은 주 로 IR (Infra-Red) 카메라를 이용하여 3차원 측위를 수행하였 다[1]. IR 카메라를 이용하면 15m 이하의 작은 워크스페이스 하에서 cm이하의 고정밀 측위가 가능하다[2]. 그러나 IR 카 메라는 고가이고, Active IR 등을 이용하더라도 신호의 도달거 리에 제한이 있다. 또한 관성 센서는 쿼드콥터에 탑재되어 자세 제어에 사용되지만, 이를 이용하여 항법을 수행하면 오 차 누적이 발생하는 문제가 있다[3]. 이러한 오차누적 및 측 위영역 제한 문제를 해결하기 위하여 무선 측위를 이용할 수 있으며, 아직까지 이에 대한 연구는 미미한 실정이다.
WPAN (Wireless Personal Area Network) 기술은 저가로 저속 의 센서네트워크 구축이 가능하고 시스템은 다수의 노드를 지원한다[4]. 이를 이용하게 되면 저렴한 인프라 구축 및 유 지보수 비용 절감이 가능하다. IEEE 802.15.4a 표준은 WPAN
을 이용한 무선측위 표준으로, 이를 이용하면 단말의 위치를 구할 수 있다. 무선측위 기술은 방식에 따라 크게 OWR (One-Way Ranging)과 TWR (Two-Way Ranging)로 나눌 수 있 다. OWR은 단말 A에서 B 혹은 단말 B에서 A로 전파 시간 을 측정하며 서로 동기화된 단말들로부터의 OWR 측정치를 이용하여 위치를 구할 수 있다. 그러나 단말간의 시각 동기 를 위하여 인프라 구축에 많은 노력 및 비용이 소모되며, 이 로 인해 TWR 방식이 선호되고 있다. TWR은 단말 A에서 B 로 그리고 단말 B에서 A로 전파 시간을 측정하며, 이는 RTT (Round-Trip Time)이라고 한다. 이 경우 OWR 방식과 다르게 단말이 동기화되어 있을 필요가 없으므로 비교적 저가로 시 스템 구축이 가능하다. 또한, SDS (Symmetric Double-Sided)- TWR 방식을 사용하면 저가형 클럭에서 발생하는 상대 클럭 드리프트 오차를 효과적으로 제거할 수 있어[5] 고정밀 측위 가 가능하다. 일반적으로 SDS-TWR기법을 사용하면 0.1 ~ 0.7m 내외의 ranging 정확도를 가지며, 커버리지는 100m ~ 880m에 이른다[6,7].
본 논문에서는 실내 비행 로봇의 정밀 측위를 위하여 TWR 방식의 무선측위 기술을 제안하였다. 기존의 TWR 기 반 무선측위 방식은 무선 측정치를 서버에서 계산하는 원격 측위 방식이나, 이를 자가 측위 방식으로 변경하게 되면 무 선 트래픽이 줄어들고 외부 센서와의 융합을 통하여 측위 갱 신률을 높일 수 있다. 또한, 다중경로 측정치가 포함된 Outlier 제거를 통하여 무선측위의 신뢰성을 높일 수 있다.
본 논문의 구성은 다음과 같다. II 장에서는 기존의 TWR 원격측위 방식이 가지는 문제점을 설명하고 이를 해결하기
Copyright© ICROS 2015* Corresponding Author
Manuscript received January 25, 2015 / revised February 9, 2015 / accepted February 26, 2015
임정민: ㈜와이파이브 기술연구소([email protected]) 정원민: ㈜이산솔루션([email protected])
성태경: 충남대학교 정보통신공학과([email protected])
※ 본 연구는 문화체육관광부 및 한국콘텐츠진흥원의 2014년도 문화 기술연구개발지원사업의 연구결과로 수행되었음.
위한 자가측위 프로토콜을 제안하였다. 그리고 III 장에서 TWR 기반 측위 시 다중경로를 검출 및 제거 알고리즘을 제 안하였고 IV 장에서는 시뮬레이션 및 실험을 통하여 성능을 검증하였다.
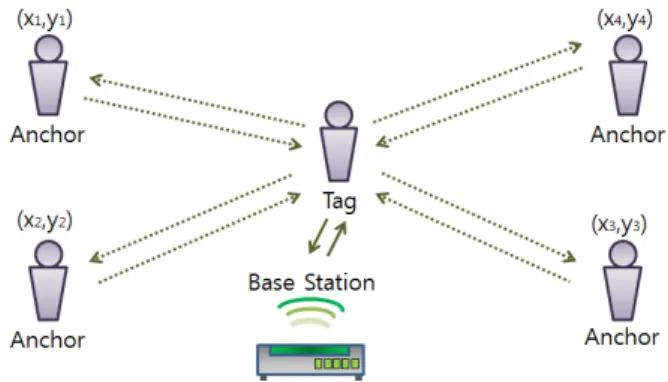
II. 측위 트래픽 저감을 위한 자가측위 프로토콜 개발 TWR 기반 시스템은 태그, 앵커, 베이스 스테이션으로 구 성된다. 초기에 베이스 스테이션(base station)은 태그(tag)를 인 식하고 태그 주변의 앵커(anchor) 리스트를 태그에게 전달하 여 준다. 이후 태그(tag)는 앵커들과 TWR을 수행하여 거리 측정치를 획득한다. 이후 태그는 베이스 스테이션에게 측위 결과를 반환하여 자신을 모니터링 할 수 있도록 한다[8]. 이 러한 데이터의 흐름을 그림 1에 정리하였다.
한편, 이렇게 생성된 TWR 측정치를 이용하여 위치를 구 하기 위해 측위 알고리즘을 수행해야 한다. 측위 알고리즘은 베이스 스테이션 혹은 태그에서 수행될 수 있다. 본 절에서 는 기존의 TWR 기반의 측위 방법론에 대하여 정리한 후, 자 가 측위 프로토콜을 제안한다. 또한 베이스 스테이션에서 측 위가 이루어지는 원격측위 및 태그에서 측위가 이루어지는 자가측위 기법을 비교하였다.
1. TWR 기반 측위 방법
태그와 i번째 앵커 간의 TWR 측정치
ri는 다음과 같이 정의할 수 있다.
2 2 2
( ) ( ) ( )
i
x
ux
iy
uy
iz
uz
iw
ir
= - + - + - + (1)
여기에서 x
u, y
u, z 는 태그의 위치,
ux
i, y
i, z 는 i번째 앵커
i의 위치, w 는 백색 가우시안 잡음이다. 한편, 다중경로가 없
i는 식을 테일러 전개하면 다음과 같다.
0 0 0
ˆ ˆ ˆ ˆ
i u i u i u
i i i u u u
i i i
x x y y z z
x y z
- - -
D
r=
r-
r= D + D + D
r r r
(2)
여기에서
rˆ
i= ( x
u0- x
i)
2+ ( y
u0- y
i)
2+ ( z
u0- z
i)
2이며, x
u0,
0
,
y
uz
u0는 nominal 태그 위치이다. N개의 측정치를 모아서 행렬 형태로 정리하면 다음과 같다.
x H
+ rD = r D r
(3)
여기에서
1 2
.
N
r r r
r
é D ù ê D ú ê ú D = ê ú ê ú ê D ú ë û r
M ,
u
u
u
x
x y
z é D ù ê ú D = D
ê ú ê D ú ë û r
1 2 T
T
T N
h H h
h é ù ê ú ê ú
= ê ú ê ú ê ú ë û r r r M
이며, h = r
iT0 0 0
ˆ ˆ ˆ
i u i u i u
i i i
x x y y z z
é - - - ù
= ê ú
ë û
r
r r r
이고,
(
T)
1 TH
+= H H
-H 이다.
2. TWR 기반 원격 측위 방법
원격측위 시스템에서는 태그의 위치를 베이스 스테이션이 계산해서 돌려주는 구조로, 베이스 스테이션은 앵커 리스트 를 태그에게 전달하여 주고 태그는 이들 앵커리스트에 포함 된 주소의 앵커와 TWR 측정치를 생성하여 베이스 스테이션 에게 전달한다. 이후, 베이스 스테이션은 계산된 위치를 태그 에게 전달하여 주는 구조이다. 태그의 성능이 낮을 경우 원
격측위가 사용되며, 태그를 저가로 제작하려 할 경우에 선호 되는 방식이다. 이 때, 반복되는 부분은 Raw range data, Tag Position, Ack의 세 부분이다. Raw range data는 태그가 앵커 리 스트에 포함된 앵커와 TWR 측정치를 생성한 결과를 전달해 주는 포맷이며 Tag Position은 Raw range data를 통해 계산한 태그의 위치를 전달해 주는 포맷이다. 그림 2에 기존의 원격 측위 프로토콜에 대하여 정리하였으며 반복되는 부분은 음 영으로 표시하였다.
3. TWR 기반 자가 측위 방법
태그가 스스로 자기의 위치를 구할 수 있다고 가정하면 거 리 측정치를 보낼 필요가 없어져 무선 트래픽 총량이 줄어드 는 효과가 있다. 또한 태그 개수가 많아질수록 TWR 기반 측 그림 1. TWR 측정치 기반 측위 시스템 예.
Fig. 1. Location System based on TWR measurements.
그림 2. 원격측위 프로토콜의 예.
Fig. 2. An example of remote positioning protocol.
그림 3. 자가측위 프로토콜의 예.
Fig. 3. An example of self-positioning protocol.
임 정 민, 정 원 민, 성 태 경 492
위 시스템은 위치 갱신율이 저하 되지만 자가측위의 경우에 는 이동체 탑재 센서와의 융합을 통하여 높은 위치 갱신율을 보장할 수 있다. 그림 3은 자가 측위 프로토콜에 대하여 정 리한 것이다. 물론 자가 측위의 경우에는 앵커 리스트 전달 시에 앵커의 주소뿐만 아니라, 앵커의 위치도 포함되어 있어 야 하므로 초기 트래픽은 많을 수 있으나 초기화 후 반복되 는 부분은 아니므로 원격측위에서 자가측위 시스템으로 전 환하면 무선 트래픽을 줄일 수 있다.
III. 3차원 고신뢰 측위를 위한 Outlier 제거 알고리즘 개발 본 절에서는 TWR 측정치를 이용하여 측위를 수행하는 경 우 Outlier의 특징을 분석하고 이를 제거하는 기법을 제안하 였다. 우선, Outlier의 측위 오차에 대한 영향을 설명하였다.
그림 3에서는 태그가 자신의 위치를 구하기 위하여 세 개 의 파란 원과 측정치를 획득하였을 경우를 가정하였다. 태그 가 획득한 TWR 측정치가 각각
r1,
r2, 그리고
r3이라 했 을 때 이 반경의 교차 지점은 태그 위치의 후보군이 되고, 빗금친 영역의 중심은 태그의 위치가 된다. 한편, 1번 앵커와 의 측정치에 다중경로 등의 영향으로 Outlier
g1이 추가로 존 재한다고 가정하면 태그 위치의 후보군은 점으로 표시된 부 분만큼 확장되며, 평균은 태그의 위치에서 벗어나게 된다.
Outlier로 인한 오차는 평균이 0이 아니며, 따라서 바이어스 처럼 존재하게 된다. Outlier로 인한 오차를 경감시키기 위해 서는 Outlier 측정치를 배제하여야 한다. 이를 위하여 Outlier 판별 알고리즘의 설계가 필요하다. Outlier가 포함된 측정치를 제거하는 알고리즘을 설계하기 위하여, 다중경로 등에 의하 여 발생하는 Outlier를 포함하는 거리 측정치를 표시하면 다 음과 같다.
' 2 2 2
( ) ( ) ( )
i
x
ux
iy
uy
iz
uz
i iw
ir
= - + - + - +
g+ (4)
여기에서
gi는 i번째 측정치의 다중경로 오차이다. 다중경로 가 포함되어 있을 시 측위 알고리즘을 이용하여 위치의 변위 량을 구하게 되면 위치 오차의 변위량은 다음과 같이 정리할 수 있다.
x H
+ rH
+ gD = r D + r D r
(5) 여기에서
gr = [
g1 g2 gN]
TL 이다. k번째 측정치에 Outlier 가 포함되어 있다고 가정하고, i번째 측정치를 제외하고 구성 한 행렬이 D x r
i,
i
,
H 그리고 D
gr
i이다.
1. 한 개의 측정치에 다중경로 오차가 발생한 경우 x
iD r
는 i에 의해서 다음과 같이 구할 수 있다.
, ,
i i i i
i
i i
H H i k
x H i k
r g
r
+ +
+
ì D + D ¹
D = í ï
D =
ï î
r r
r r (6)
또한, x D r 와 D x r
i의 차는 다음과 같이 정리된다.
0,
i k
,
i
i k
x x
i k
aì ¹ D - D » í î = r r
(7)
여기에서
aik= H
i+D
gr
i이다. 상기 식에 의하면, 하나의 측정
치에 Outlier가 포함되어 있을 경우 N개의 판별식 중에 k번째 측정치를 제외한 경우만 해가 동떨어져서 위치하는 것을 알 수 있다.
2. 두 개의 측정치에 다중경로 오차가 발생한 경우 k번째 측정치 및 l번째 측정치에 다중경로 오차가 포함되 어 있는 경우를 고려하자.
k l
,
i i i i
l
i i i i
k
i i i
H i k i l
x H i k
H i l
r a a
r a
r a
+ + +
ì D + + ¹ Ù ¹
D = ï í D + =
ï D + =
î r
r r
r (8)
Outlier의 특징을 조사하기 위하여, 다중경로가 포함된 측 정치의 성질을 분석하였다.
0, , ,
k
i i
l i
i k i l
x x i k
i l
aa
¹ Ù ¹ ì ï
D - D » í =
ï =
î r r
(9)
상기 식에 의하면, 두 개의 측정치에 Outlier가 포함되어 있 을 경우 N개의 판별식 중에 k번째 측정치를 제외한 경우와 l 번째 측정치를 제외한 경우 해가 동떨어져서 위치하는 것을 알 수 있으며, 가장 멀리 떨어져 있는 경우는 k번째 측정치 에 그리고 l번째 측정치에 포함된 다중경로의 상대적인 양에 따라 달라진다.
3. 일반적인 경우
Outlier 제거 알고리즘을 수행하였을 때 다중경로가 포함되 지 않은 i번째 측정치를 제거하였을 시에는 D x r
i는 x D r
근처 로 구하여지고 다중경로가 포함된 측정치를 제거하였을 때 는 x D r
와 거리가 발생한다. 다수의 D x r
i가 x D r
근처로 판별 될 경우는 N이 홀수 일 때 (N+1)/2개, N이 짝수일 때는 N/2 개 일 때이다. N개의 측정치 중에서 이 이하의 다중경로 측 정치가 존재할 경우 다음과 같이 Outlier 검출이 가능하다. 상 기와 같은 방식으로 x D r
와 D x r
i의 차이를 구하고 Outlier를 제거한 다음 또 다시 (N-1)개의 측정치를 이용하여 Outlier 제 거를 수행하여 다중경로 오차를 순차적으로 제거할 수 있다.
그러나 앵커의 제거가 DOP (Dilution of Precision)의 큰 변화를 가져온다면 해당 측정치 전체를 사용하지 않음으로써 측위 오차 증가를 막을 수 있다. 여기에서는 다중경로 측정치가 최대 2개까지 포함되어 있고 가정하였다. 한편, 일반적으로
H
+D
rr
와 H
i+D
rr
i는 같지 않으므로, Outlier 검출 시 다음과 같은 시스템 오차가 발생한다.
2
(
i i i i)
T n
n H H H H
E n n
r g r g
s
+ + + +
D = D + D - D + D
é ù
= ë D D û
r r r r
r
r r (10)
만일 Outlier 검출을 위한 문턱값을
sn2보다 작게 설정한다 면, 잘못된 Outlier를 검출할 가능성이 높으므로 문턱값은
2
sn
의 배수보다 커야 한다. 또한, H
+도 H
i+와 같지 않으므 로, 이에 대한 영향을 최소화하기 위한 Outlier 판별식은 다음 과 같다.
( )
T 1( )
i
x x
iQ x x
ij
= D - D r r
-D - D r r
(11)
그림 4. Outlier로 인한 측위 오차에 대한 설명.
Fig. 4. An explanation of location error due to outlier.
그림 5. 두 개의 아웃라이어에 대한 검출 알고리즘.
Fig. 5. Detection algorithm for two outliers.
상기 판별식들로부터 다중경로 측정치를 가려내기 위하여, Classifier를 사용한다. Classifier는
ji를 통계적 특성에 기반하 여 여러 개의 Class로 구분한다. 임의의
sn2로 바운드된 Class 중 가장 크기가 큰 Class를 제외한 다른 Class에서 최대 값을 가지는
ji를 선별하여 제외한다. 만일 시스템이 다수 의 다중경로를 가정한다면, 이러한 Classifier는 반복될 수 있 다. 그림 4에 두 개의 Outlier를 제거하는 알고리즘의 순서도 를 정리하였다.
IV. 제안하는 삼차원 TWR 측위 시스템의 성능검증 및 실험결과 정리
본 절에서는 제안하는 Outlier 제거 알고리즘의 성능을 분 석하기 위해서 기존의 TWR 측정치 기반 측위 시스템에서 시뮬레이션을 수행하였고 실제 측정 데이터를 기반으로 측 위 시스템의 성능을 검증하였다.
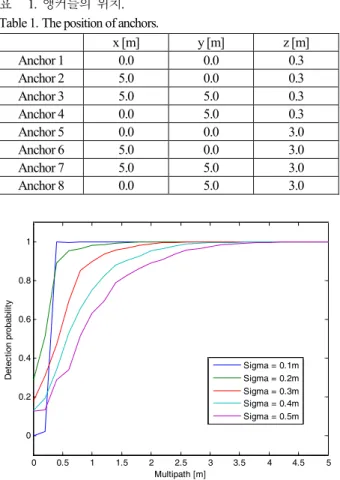
표 1. 앵커들의 위치.
Table 1. The position of anchors.
x [m] y [m] z [m]
Anchor 1 0.0 0.0 0.3
Anchor 2 5.0 0.0 0.3
Anchor 3 5.0 5.0 0.3
Anchor 4 0.0 5.0 0.3
Anchor 5 0.0 0.0 3.0
Anchor 6 5.0 0.0 3.0
Anchor 7 5.0 5.0 3.0
Anchor 8 0.0 5.0 3.0
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
0 0.2 0.4 0.6 0.8 1
Multipath [m]
Detection probability
Sigma = 0.1m Sigma = 0.2m Sigma = 0.3m Sigma = 0.4m Sigma = 0.5m
그림 6. 두 개의 아웃라이어에 대한 검출 알고리즘 수행결과.
Fig. 6. Results of detection algorithm for two outliers.
1. 시뮬레이션을 통한 다중경로 오차의 정도에 따른 Outlier 검출 성능 확인
TWR 측정치에 다중경로가 어느 정도 포함되어 있는지에 따라 검출 확률이 달라진다. 또한 TWR 측정치에 포함된 측 정치 잡음에 의해서도 영향을 받는다. 정량적인 특징을 확인 하기 위하여, 단일 다중경로 측정치를 검출하기 위한 시뮬레 이션을 수행하였다. 앵커의 위치는 표 1과 같이 가정하였다.
그림 6은 다중경로의 수치를 측정치에 포함된 잡음의 파 워 비 마다 0m에서 5m로 변경하면서 도시한 것이다.
시뮬레이션에 의하면 sigma가 약 0.2~0.3m 이하일 때 2m 이상의 다중경로도 검출할 수 있는 것을 확인하였다.
2. 실측 실험 및 측위 결과
본 절에서 제안하는 TWR 측위 시스템의 성능 상향을 위 한 Outlier 검출 알고리즘을 포함한 실험을 수행하였다. TWR 측정치 획득을 위하여 독일 나노트론 사의 Nanotron 5375DK 를 활용하였으며, 이 시스템을 이용하면 1m 오차의 TWR 측 정치를 구할 수 있다. 삼차원 측위를 위하여, 직사각형의 영 역에 그림 7과 같이 여덟 개의 앵커를 배치하였다.
이 때 앵커의 안에서 1m 간격의 측위를 수행하였다. 측정
된 측정치 중 Outlier가 포함되어 있지 않을 시 계산된 위치
는 Outlier 제거 알고리즘을 통과해도 변하지 않으나 측정치
에 Outlier가 포함되어 있을 시 측위 오차가 줄어들어 측위
결과의 신뢰성을 향상시키는 효과가 있다. 이를 표 2에 정리
하였다.
임 정 민, 정 원 민, 성 태 경 494
그림 7. TWR 측위 시스템의 실험 환경.
Fig. 7. Experimental environments for TWR-based positioning.
표 2. 제안하는 알고리즘의 2차원 측위 결과 (괄호 안은 Outlier 제거 전임).
Table 2. The two-dimensional localization result with suggested algorithm.
X=1 X=2 X=3 X=4
Y=1 0.7, 0.9 (1.1, 0.7)
2.4, 1.5 (2.1, 0.6)
3.5, 0.4 (4.4, 0.7)
4.4, 0.6 (3.5, 1.8) Y=2 0.9, 1.7
(0.3, 2.0)
1.8, 1.8 (3.7, 2.7)
2.9, 1.7 (3.0, 1.7)
5.0, 1.7 (5.1, 1.7) Y=3 0.7, 3.7
(0.7, 0.1)
2.8, 3.3 (2.7, 3.5)
3.1, 2.8 (2.7, 3.5)
3.8, 2.3 (4.8, 1.7) Y=4 1.1, 4.3
(1.1, 4.1)
2.1, 4.6 (2.2, 4.5 )
3.3, 4.1 (3.4, 2.7)
4.2, 3.8 (4.6, 3.9) 표 3. TWR 기반 측위 시스템의 측위 오차 비교 (왼쪽 : 제
안하는 알고리즘, 오른쪽 : 기존 알고리즘).
Table 3. Comparison of the positioning error in TWR-based localization system (Left : suggested algorithm, Right : existing algorithm).
X=1 X=2 X=3 X=4
Y=1 0.32 / 0.32 0.64/0.41
0.78/1.43
0.57/0.94 Y=2 0.32/0.700.28/1.84
0.32/0.30 1.04/1.04 Y=30.76/2.92
0.85/0.86 0.22/0.580.73/1.53
Y=4 0.14/0.32 0.61/0.540.32/1.36
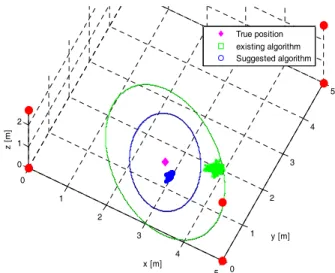
0.28/0.61실험 결과를 분석하면 다음과 같다. 측위 오차가 1m 이상 인 지역에서도 Outlier 제거 알고리즘을 적용하면 측위 정확 도가 1m 이내로 줄어드는 것을 확인하였다. 특히, Outlier가 제거되면 오차 바이어스의 제거와 함께 1m 이상의 측위 성 능이 개선되는 것을 확인할 수 있다. 그림 8은 (3, 1)에서 오 차의 값을 나타낸 것이다.
V. 결론 및 향후 연구 방향
본 논문에서는 비행 로봇의 측위를 위해, WPAN 기반측위 시스템을 제안하였다. 기존의 WPAN 기반 측위 시스템의 성 능을 개량하기 위해, 기존의 원격측위 시스템을 자가측위 시 스템으로 변경하여 통신 트래픽을 저감시켰다. 또한, 다중경 로로 인한 Outlier 검출을 위한 검출 알고리즘을 제안하였고 시뮬레이션 및 실험을 통하여 이를 검증하였다. 다중경로 오
차가 여러 개인 경우에도 N개의 측정치 중 절반 이하의 측 정치에 다중경로가 포함되어 있을 경우 순차적으로 오차를 제거할 수 있다. 실험결과를 통하여 제안하는 알고리즘을 이 용하면 잡음의 표준편차가 약 0.3m 이내일 때 2m 이상의 다 중경로를 제거할 수 있어 고신뢰 측위 결과를 획득할 수 있 음을 확인하였다. 비행 로봇의 측위 갱신률 향상에 대한 연 구가 필요하다.
REFERENCES
[1] J. H. Oh, D. J. Kim, and B. H. Lee, “An indoor localization system for mobile robots using an active infrared positioning sensor,” Journal of Industrial and Intelligent Information, vol. 2, no. 1, Mar. 2014.
[2] J. López, C. Watkins, D. Pérez, and M. Díaz-Cacho,
“Evaluating different landmark positioning systems within the RIDE architecture,” Journal of Physical Agents, vol. 7, no. 1, Jan. 2013.
[3] J. D. Park, M. W. Kim, J. Y. Lee, H. S. Kim, and H. K. Lee, “A study on GPS/INS integration considering low-grade sensors,”
Journal of Institute of Control, Robotics, and Systems (in Korean), vol. 19, no. 2, pp. 140-145, 2013.
[4] D. H. Choi and D. S. Kim, “Wireless fieldbus for networked control systems using LR-WPAN,” International Journal of Control, Automation and Systems, vol. 6, no. 1, pp. 119-125, Feb. 2008.
[5] J. W. Park, J. M. Lim, K. J. Lee, and T. K. Sung, “A two-way ranging WPAN location system with clock offset estimation,”
Journal of Institute of Control, Robotics, and Systems (in Korean), vol. 19, no. 2, pp. 125-130, 2013.
[6] Nanotron Technologies GmbH, White Paper, (2007), nanoNET Chirp Based Wireless Based Networks, Nanotron Technologies GmbH, Alt-Moabit 60, 10555 Berlin, Germany.
[7] www.spoonphone.com
[8] J. M. Lim, K. J. Lee, J. H. Oh, S. H. Yoo, and T. K. Sung,
“Design of cooperative positioning system for indoor/outdoor swarm robots,” The summer conference of The Institute of Electronics Engineers of Korea (in Korean), Jun. 2013.
0 1
2 3
4
5 0 1
2 3
4 5
0 1 2
y [m]
x [m]
z [m]
True position existing algorithm Suggested algorithm
그림 8. TWR 기반 측위 알고리즘의 오차 비교 (x=3m, y=1m).
Fig. 8. Comparison of the TWR-based positioning algorithm at (3, 1).
Jeong-Min Lim, Won-Min Jeong, and Tae-Kyung Sung