Person Tracking by Detection of Mobile Robot using RGB-D Cameras
1)
전체 글
1)
수치
![Fig. 8. ROS Navigation Stack Structure[9] 우선 OpenKinect 커뮤니티에서 제공하는 kinect-v2 드라이 버 라이브러리 freenect2의 소스를 다운로드하여 컴파일 후에 설치한다](https://thumb-ap.123doks.com/thumbv2/123dokinfo/5316510.384729/5.892.154.750.153.411/navigation-structure-openkinect-커뮤니티에서-제공하는-라이브러리-다운로드하여-설치한다.webp)
관련 문서
Global structural analysis model of the 300K VLCC by using the developed method. (Shell element, 1-D
The torque analysis was performed acting on the joint of robot by modeling the kinematics and dynamics of the robot.. Load torque of the joint
Human Actions Tracking and Recogni tion Based on Body Parts Detection via Artificial Neural Network.. ○ 인공 신경망 ->
Human Actions Tracking and Recogni tion Based on Body Parts Detection via Artificial Neural Network.. ○ 인공 신경망 ->
In this paper, we propose a method to guarantee the system life as passive elements by using high efficiency operation and analog devices by tracking
HTTP POST 방식 방식 데이터 데이터 요청 요청 예제 예제 (2) (2).. • InputStream을 통해
[r]
Characterization of the glycoprotein D gene products of equine herpesvirus 1 using a prokaryotic cell expression vector.. Expression of equine herpesvirus-1 glycoprotein D by
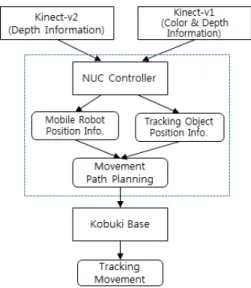
![Fig. 11. Proposed System Structure in Ref. [15]](https://thumb-ap.123doks.com/thumbv2/123dokinfo/5316510.384729/6.892.130.776.158.265/fig-proposed-structure-ref.webp)