AN ACCURACY ASSESSMENT OF 3D GEOPOSITIONING OF WORLDVIEW-1 IN-TRACK STEREO PAIR
Kwan-young Oh 1 and Hyung-Sup Jung 2
1
Dept. of Geoinformatics, University of Seoul, [email protected]
2
Dept. of Geoinformatics, University of Seoul, [email protected]
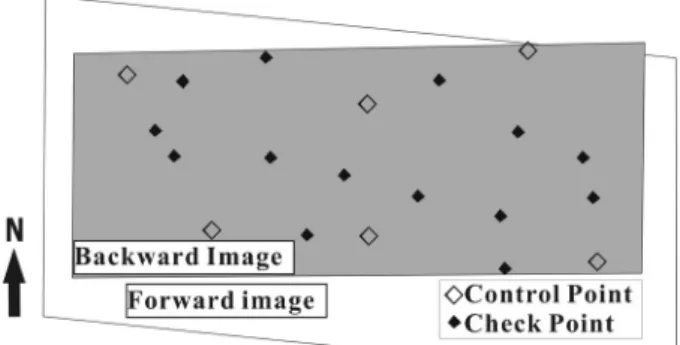
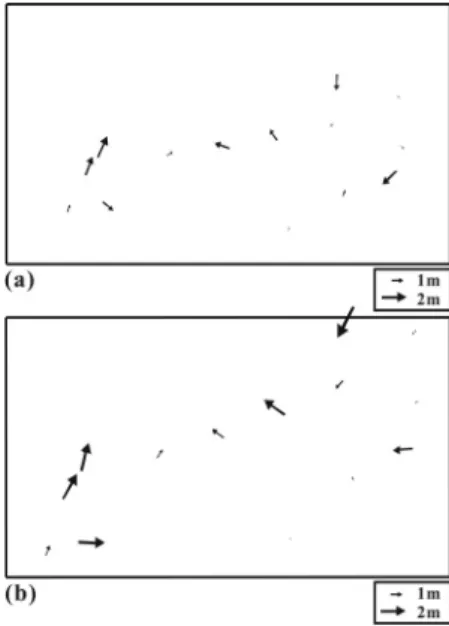
ABSTRACT: The successful operation of the WorldView-1 satellite has enabled the advanced high-accuracy mapping with state-of-the-art geolocation accuracy capabilities and half-meter ground resolution distance (GSD). The in-track stereo capability of the WorldView-1 sensor also provides the good opportunity to generate high-resolution digital elevation model (DEM). The objective of this paper is to evaluate a three-dimensional geopositioning accuracy of the WorldView-1 in-track stereo images to extract precise 3D geolocation. In this paper, we accessed a three- dimensional geopositioning accuracy of the WorldView-1 in-track stereo images using rational polynomial coefficient (RPC) model without ground control points (GCP), and also evaluated using RPC adjustment model with GCP. Three- dimensional positioning accuracy achieved by the adjustment of exterior orientation parameters was improved from 2.84 m, 3.33 m, 1.26 m to 1.33 m, 1.04 m, and 0.84 m in X, Y and Z directions. This result implies that the residual errors of rational function model (RFM) model were effectively removed by the proposed method to yield good three- dimensional geopositioning accuracy.
KEY WORDS: WORLDVIEW-1, RPC, 3D-geopositioning 1. INTRODUCTION
Since the WorldView-1 was launched in September 18, 2007, the WorldView-1 satellite has acquired a large number of high resolution images. These have been used for urban and regional mapping, disaster management, classification, and many other purposes (Poli et al, 2009).
The WorldView-1 is equipped with state-of-the-art geopositioning accuracy capability and exhibits efficient in-track stereo collection. To leverage the WorldView-1 images for applications such as DEM generation, urban monitoring, disaster management, 3D Earth model construction, etc, the sensor model of the ortho- rectification of the images is required, because a well- designed sensor model can ensure 3D reconstruction models and ortho-rectification products generated from images.
Physical sensor models and generalized sensor models are the two broad categories of sensor models (McGlone, 1996). The physical sensor model is most accurate, because it requires various information of the camera, orientation parameters, orbit parameters, etc. There are the bundle adjustment model, line-of-sight vector adjustment model, orbital resection model, etc in this physical sensor model. A generalized sensor model uses the approximate conditional equations. The rational function model (RFM) is one of the generalized sensor models, and is capable of achieving high approximation accuracy. The RFM is generally the ratio of two polynomials calculated from the physical sensor model, which does not reveal the sensor parameters.
Many researchers have previously investigated the RFM. Madani (1999) discussed advantages and disadvantages of the RFM, and compared it with physical sensor models. Fraser et al. (2001) compared the RMF, an extended DLT (Direct Linear Transformation) model, and an affine projection model. Tao and Hu (2002) discussed the 3D reconstruction algorithms based on both
the forward and inverse RFM forms and compared the performance of these two reconstruction methods using several stereo pairs. This RFM model has been the most popular method in orthorectifying high resolution images.
In this paper, we accessed a three-dimensional geopositioning accuracy of the WorldView-1 in-track stereo images using rational polynomial coefficient (RPC) model with and without ground control points (GCP).
2. RATIONAL FUNCTION MODEL WorldView-1 RFM is forward method which can be calculated from ground coordinate (latitude, longitude, height) to image coordinate (column, row). The RPC parameters for the coordinate transformation between ground and image positions are given from Auxiliary file.
In the RFM, image pixel coordinates (c, r) are expressed as the ratios of polynomials of ground coordinates (X, Y, Z). In order to improve the numerical stability of equations, the two image coordinates and three ground coordinates are normalized to fit the range from –1.0 to 1.0 using offset values and scale factors.
For the ground-to-image transformation, the defined ratios of polynomials have the forward form as defined as (Greve et al., 1992; OGC, 1999):
1 , ,
2 , , , 3 , ,
4 , , 1 Let
, , ,to be the un-normalized coordinate values of points in object space. The normalization of the ground coordinates can be computed using the following equations.
,
(2)
, , Z
Where , , , , c = offset values , , , , c = scale values.
Polynomials 1, 2, 3,4 have the general form as follows.
, ,
2 2
2 2
2 2 2
2 2