수중 3D 콘텐츠 제작에 관한 연구
김상훈*․김태은**
A study on underwater 3D contents production
Sang-Hoon Kim*․Tae-Eun Kim**
요 약
최근에 3D 콘텐츠에 대한 관심은 점차 늘어나고 있으며 시청자들은 다양한 3D 콘텐츠를 요구하고 있다.
이와 같은 상황에서 수중 3D는 시청자 요구에 부응할 수 있는 하나의 대안이다. 수중은 공기 중과 달리 밀도 가 큰 물을 통과하기 때문에 실제 물체 보다 크고 가깝게 보이는 특성이 있다. 이에 맞게 수중 3D 콘텐츠 제 작을 위해서는 카메라 사이의 간격과 물체사이의 거리 및 컨버전스 값을 새로이 수정할 필요가 있다. 본 논 문에서는 수중이라는 공간이 가지는 특수성에 맞게 최적 입체값 설정 방법을 제시하였다. 또한 수중 3D 콘텐 츠 제작 사례를 통해 수중 3D 콘텐츠 개발 방법을 제시하였다. 이를 통해 수중에서만 볼 수 있는 화려한 색 감, 다양한 해양생물, 심해의 미개척지 등 헤아릴 수 없는 많은 촬영 소재들이 3D 콘텐츠화 될 수 있기를 기 대한다.
ABSTRACT
Recently, the interest of 3D contents are increased and viewers demand a variety of 3D contents. In such circumstances, underwater 3D contents are an alternative to meet the demands of viewers. Cause that underwater mass density is 1.33 times that in air the objects in underwater is bigger and closer in real. Therefore it needs to modify the distance between cameras, the distance to objects and the convergence value. In this paper, we present the method to set optimal depth values with the particularities of underwater space. In addition, through the case of underwater 3D production we present the method of underwater 3D contents development. We expect that a lot of material with colorful, variety marine organism in underwater will be made of 3D contents.
키워드
underwater, depth value, 3D contents, stereo base, convergence 수중영상, 깊이값, 3D 콘텐츠, 축 간격, 컨버전스
* 제주한라대학교 방송영상과 교수([email protected]) ** 남서울대학교 멀티미디어학과 교수([email protected]) 접수일자 : 2012. 05. 08 심사(수정)일자 : 2012. 05. 25 게재확정일자 : 2012. 06. 07
Ⅰ. 서 론
최근 3DTV의 보급과 3D영화의 성공으로 3D 입체 영상에 대한 관심이 높아졌다. 국내에서도 다양한 3D 콘텐츠가 제작되고 있으나 수중 3D에 대한 촬영 기술
과 장비는 아직 미흡한 단계이다. 3D 수중 촬영은 수 중이라는 특수성과 화려한 색감, 다양한 해양 생물, 심해의 미개척지 등 헤아릴 수 없을 정도로 많은 촬 영 소재들이 있다. 이러한 소재들을 3D 콘텐츠화 하 기 위해서는 탁도가 높은 수중에서 스테레오 카메라
의 수평, 수직 정렬을 위한 보정 작업이 필요하며 이 러한 장비들은 수중 하우징을 해야 한다[1]. 현재 수 중촬영에 첫 번째 필수 요소인 수중 하우징의 경우 외국에서 주문 제작된 몇 가지 종류가 있지만 이는 대부분 수평형 방식의 하우징이며, 수중 클로즈업 촬 영에 필수적인 수직리그 방식의 하우징은 전 세계에 서 몇 개의 영화 촬영용 만이 있을 뿐이다. 하지만 이 것들도 부피가 너무 크고 무거워 수중에서 운용하기 에 큰 문제점들을 안고 있다. 지난 10년 동안 국내에 서도 3D 촬영을 위한 장비 개발이 이루어져 왔다.
레드로버는 초기 애니메이션 중심의 콘텐츠 제작에서 점차 실사 위주의 콘텐츠 제작에 대한 수요가 늘어날 것을 예측하고 2006년부터 소형 입체 카메라 리그를 개발해 왔으며 최근에는 2대의 기존 방송용 카메라를 이용한 입체영상 촬영용 카메라 리그를 개발해 판매 하고 있다.
최근에는 영진위의 지원을 받아 레드로버, 스테레 오픽쳐스, 광운대 등이 컨소시엄을 구성하여, 영화 촬 영에 필요한 4가지 종류의 카메라 리그를 개발하고 있으며, 이 가운데 직교형을 판매하고 있다. 국내 3D 촬영 장비의 선두 주자인 리얼스코프 또한 직교 방식 의 리그를 개발해 판매해오고 있다. 최근에는 국내 중 소기업인 투데이C&T가 카메라와 리그를 실시간 자동 으로 연결해주는 3D 촬영 장비를 개발했다. 하지만 이것들도 부피가 너무 크고 무거워 수중에서 운용하 기에 큰 문제점들을 안고 있다. 최근 (주)파티마엔지 니어링에서 수중 3D 촬영용 직교 리그와 하우징을 개 발하였다[1]. 본 연구에서는 수중 3D 촬영 장비를 이 용한 3D 콘텐츠 제작을 위한 입체값 설정 및 수중 3D 콘텐츠 제작 방법을 제안하고자 한다.
Ⅱ. 연구 배경
수중 촬영을 위해서는 수중이라는 공간이 가지는 특성을 이해해야한다. 사진은 일상생활에서 우리가 보 고 있는 물체의 색과 형상을 빛으로 그려내는 결과물 이다. 빛이 물체에 반사되고 흡수되는 정도에 따라 우 리는 사물을 구별할 수 있다. 그런데, 빛은 공기라는 매질을 통과 할 때와 물이라는 매질을 통과할 때 상 당한 차이를 두고 변하게 된다.
빛이 수중에서 어떻게 변하느냐를 완벽하게 이해하 는 것은 수중 사진의 기초이자 어쩌면 모든 것이 될 수도 있다. 빛이 밀도가 다른 매질 속으로 들어가게 되면 진행 방향이 달라지게 되는데
이는 빛의 진행속도가 매질에 따라 달라지기 때문 이다. 공기 중에서 빛의 굴절률을 1이라고 기준할 때, 담수에서는 1.33 해수에서는 1.34라는 굴절률을 가진 다. 수중에서 맨눈으로 사물을 볼 때 사물이 흐릿하게 보이는 이유는 빛이 전해지는 매질의 밀도가 공기보 다 물에서 크므로 물체의 영상이 망막 뒤에 초점을 맺게 하기 때문이다. 그러므로 수중에서 물체를 명확 하게 보기 위해서는 눈앞에 공기층을 만들어야 한다.
이렇게 인위적으로 공기층을 만들기 위해서 필요한 것이 마스크(Mask)이다. 그런데 마스크를 쓰게 되면 공기와 물의 경계면으로 인해 빛이 굴절하게 된다. 이 렇게 굴절된 빛은 물체를 3/4 정도 가깝게 보이게 하 고 실제보다 25%정도 크게 보이게 한다. 물속에서는 렌즈도 눈이 일으키는 것과 같은 굴절을 일으킨다. 공 기라는 매질에 맞게 설계되어 있는 육상용 렌즈를 수 중용으로 사용할 경우 렌즈 앞에 인위적인 공기층을 만들기 위해 하우징을 씌우게 된다. 이때 하우징 안의 공기층과 하우징 밖 물의 경계면에서 빛이 굴절하게 된다. 이러한 굴절로 인해 육상에서 사용하는 렌즈의 화각은 수중에서 폭이 좁아진다[2][3][4].
수중에서는 물의 굴절률(1.33) 때문에 실제의 피사 체보다 4/3배 크게 보이고 거리는 3/4배로 가깝게 보 이게 된다. 수중 촬영에서 이 현상을 이해하는 것이 중요하다. 촬영 시 카메라의 렌즈로 초점을 맞춰야 하 는데 만일 물체와의 실제 거리에 초점을 맞추게 되면 사진은 흐릿하게 나오게 될 것이다. 왜냐하면 눈에 보 이는 거리가 실제 거리 보다 더 가깝기 때문이다. 이 는 3D 촬영에도 그대로 적용 되어야 한다[2][3][4]. 입 체값을 설정하기 위해 대상 물체와의 거리에 따라서 두 카메라 사이의 거리를 조절해야 하는데 실제 거리 보다 화면에 보이는 거리가 더 가깝기 때문에 실제 보다 더 카메라 사이의 간격을 좁혀야 한다. 육상 3D 촬영에 있어서는 촬영 목적에 맞는 카메라 사이의 거 리와 물체 사이 등에 따른 입체값 설정에 관한 연구 가 많이 진행되어 왔으나 수중 3D 촬영을 위한 입체 값 설정 및 콘텐츠 제작에 관한 연구는 많이 이루어 지고 있지 않ㄴ다.
Ⅲ. 수중 3D 입체영상제작 3.1 영상 획득
3D 입체영상을 제작하기 위해서는 일반적으로 수 평식 또는 직교 방식의 리그를 이용하여 영상을 취득 한다. 수중 3D 촬영을 위해서는 앞서 언급한 리그를 수중 하우징 해야만 한다[1]. 국내에서 최초로 개발한 파티마엔지니어링의 수중 3D 촬영 장비를 이용하여 영상을 취득하였다. 그림 1의 (a)는 파티마엔지니어링 의 직교 방식 리그로 파나소닉 HDC-TM700 카메라 두 대를 장착한 모습이고 (b)는 리그를 장착한 하우징 모습이며 하우징 외부에 4개의 조명을 달고 있다. 리 그에 장착된 컨트롤 유닛의 작동 부위를 하우징 외부 에서 컨트롤할 수 있게 제작되었다. 리그 동작 뿐 아 니라 Power ON/OFF, Start/Stop, Zoom In/Out 동기 화를 통해서 하우징 외부에서 두 대의 캠코더를 동시 에 컨트롤할 수 있다.
(a) 직교방식 리그 (b) 하우징 그림 1. 직교 방식 리그 및 하우징 Fig. 1 Vertical type Rig & Housing 3.2 입체값 설정
입체영상을 제작하기 위해서는 인간이 인지하는 입 체감 지각 원리를 이용한다. 인간은 크게 생물학적 요 인에 기인한 단안에 의한 입체감 지각원리와 양안 시 차와 같은 양안에 기인한 요인에 의하여 입체감을 지 각한다. 인간의 두 눈은 평균적으로 6.5cm거리를 두고 떨어져 있기 때문에 두 눈에 보이는 이미지는 약간 다르게 나타난다. 이를 양안 시차(Binocular Disp- arity)라 하는데, 현재 제작 되고 있는 대부분의 입체 영상은 양안에 의해 발생하는 시차를 이용한 제작 방 법을 바탕으로 한다. 또한 인간의 두 눈은 바로 보는 물체의 거리에 따라서 양쪽 눈의 시선이 물체를 향해
서 모이게 되는데 이를 폭주 또는 컨버전스(Conve- rgence)라 한다[5][6][7][8][9].
인간이 입체감을 지각하는 양안 시차와 컨버전스 원리를 이용하여 촬영에 적용한 것이 입체영상이 된 다. 입체 영상 촬영에는 인간의 두 눈을 대신하여 두
그림 2. Convergence 개념도 Fig. 2 Convergence diagram
대의 카메라를 활용 한다. 두 대의 카메라 사이의 거 리를 조절하여 입체감을 설정하며 두 대의 카메라 각 도를 조절하여 광축을 한곳에 모음으로써 컨버전스 역할을 수행하게 된다. 두 대 카메라의 광축이 모이는 한 점을 주시점(Convergence Point) 또는 0점(Zero parallax)라 하며 parallax가 발생하지 않아서 스크린 면이 된다[5][6][7][8][9][10]. 그림 2에서와 같이 주시 점 보다 앞에 있는 물체는 Positive Parallax가 발생하 며 스크린 면 보다 앞으로 튀어 나와 보이고, 주시점 보다 뒤에 있는 물체는 negative parallax가 발생하여 스크린 면 보다 뒤에 들어가 보이게 된다.
스테레오 카메라를 통해서 양안 시차를 발생시키기 위해서는 두 카메라 사이의 간격(interocular distance, 또는 stereo base)을 조절해야 한다. iod(interocular distance)는 초점거리, 카메라로부터 가장 가까운 물체 와의 거리, 카메라로부터 가장 먼 물체와의 거리 등과 같은 변수들로 부터 계산 되어질 수 있다. 일반적인 스테레오 베이스 계산법은 다음과 같다.
×
×
• StereoBase : 두 카메라 사이의 거리
• Focal Length : 카메라의 초점거리
• dMin : 가장 가까운 물체와의 거리
• dMax : 가장 먼 물체와의 거리
MAOFD(Maximum Acceptable On Film Devi- ation)는 좌, 우 영상의 차이로서 다음과 같이 정의된다.
MAOFD(mm) = Fim or CCD width(mm) x SSR
SSR은 stereo separation ratio로서 스크린 사이즈 가 2000(mm)이고 스크린 상에서 좌, 우 영상의 분리 가 70(mm)로 설정하고자 한다면 SSR은 70(mm) / 2000(mm)=0.035가 된다. 따라서 35mm 렌즈에 대해 MAOFD는 35(mm)×0.035=1.225가 된다.
위와 같은 계산 공식을 입체영상 촬영에 적용하기 위한 모바일 어플리케이션이 시중에 나와 있다. 그림 3은 iPhone, iPad 용 입체 계산기 RittaiCalc3D이다.
사용자는 원하는 스크린 사이즈, 가장 가까운 물체, 가장 먼 물체 사의 거리 그리고 카메라 초점 거리를 입력하면 최적의 카메라 사이의 거리(iod)를 계산해서 알려준다[11].
그림 3. RittaiCalc3D 입체 계산기 Fig. 3 RittaiCalc3D 3D calculator
그림 4. RealD 사의 입체 계산기 Fig. 4 RealD 3D Calculator
그림 4는 RealD 사의 입체계산기이다[12].
위와 같은 어플리케이션은 3D 효과에 대한 최적의 매개 변수를 결정하는데 도움을 주지만 수중 3D 촬영 에 있어서는 조명과 빛이 통과하는 매질의 차이 때문 에 생기는 변수를 제대로 반영하기가 힘들다. 공기 중 에서 빛의 굴절률을 1이라고 기준할 때, 담수에서는 1.33, 해수에서는 1.34라는 굴절률을 가진다. 따라서 굴절된 빛은 물체를 3/4 정도 가깝게 보이게 하고 실 제보다 25%정도 크게 보이게 한다. 수중 3D 촬영을 위한 입체값 설정을 위해서는 빛의 굴절률에 따른 변 수를 반영해야한다. 표 1은 수중 3D 촬영을 위한 카 메라 간 거리와 카메라와 대상 물체 거리에 따른 컨 버전스 값을 나타낸다.
그림 5는 47인치 3DTV를 대상으로 2% parallax 값을 주기 위해 40cm 에 컨버전스 포인트를 맞추고 솔베감팽 물고기를 30cm 거리에서 촬영한 영상이다.
그림 5. 스테레오 입체 영상(side by side) Fig. 5 Stereoscopic images(Side by Side)
실제거리 (mm)
화면상 거리 (mm)
카메라 간 거리(mm)
5 10 15 20 25 30 35
200 150 1.91 3.82 5.72 7.63 9.53 11.42 13.30
300 225 1.27 2.55 3.82 5.10 6.36 7.63 8.89
400 300 0.95 1.91 2.86 3.82 4.77 5.72 6.68
500 375 0.76 1.53 2.29 3.06 3.82 4.58 5.34
600 450 0.64 1.27 1.91 2.55 3.18 3.82 4.45
700 525 0.55 1.10 1.64 2.18 2.73 3.27 3.82
800 600 0.48 0.95 1.43 1.91 2.39 2.86 3.34
900 675 0.42 0.85 1.27 1.70 2.12 2.55 2.97
1000 750 0.38 0.76 1.15 1.53 1.91 2.29 2.67
표 3. 대상 물체와 카메라 간 거리에 따른 컨버전스 각도 Table. 3 Convergence angle between object and two cameras
3.3 후반 작업
입체영상(S3D Stereoscopic 3D Image)은 기존 단 일 영상과 달리 좌, 우 두 장의 영상으로 된 쌍이 존 재한다. 입체영상제작 촬영 현장의 여건이나 촬영자의 능숙도 또는 불완전한 리그 시스템 등 여러 가지 요 인에 의해서 좌안, 우안 영상의 기하학적 왜곡과 직교 식 방법으로 촬영했을 경우 하프미러를 이용하기 때 문에 좌, 우 영상의 색상 차가 일반적으로 크게 나타 난다. 이러한 왜곡 현상들은 입체영상을 관람 시 시청 자들에게 피로감을 유발 시키는 원인이 된다. 따라서 입체영상 제작 후반 작업을 통해 피로도를 최소화시 키기 위해 반드시 개선해야한다. 일반적인 후반 작업 워크플로우는 다음과 같다.
Edit Workflow
1) Left / Right Database
2) Timecode Sync / Sound Waveform Sync / Motion Sync
3) Stereo Source Editing 4) Anaglyph Mode
5) Convergence / Alignment / Rotation / Size / Corner Pin- Stereo Correction
6) Side By Side Mode - First Edit Confirm 7) Re-Editing
8) Stereoscopic Color Correction 9) Second Edit Confirm 10) Stereo Mastering
3.3.1 좌, 우 영상 동기화
입체 영상 편집에 가장 중요한 요소 중에 하나가 촬 영된 좌, 우 영상에 대한 동기를 맞추는 일이다. 동일 한 모델의 카메라와 동일 모델의 렌즈, 동기화된 타임 코드, GenLock 신호를 부여한다면 동일한 프레임 특 성을 가진 좌, 우 영상을 얻을 수 있을 것이라 생각되 지만 카메라 자체의 전기적 신호가 완벽하게 일치하 지 않는 원인과 테이프 또는 데이터 기반의 레코딩 과정에서 신호 불일치로 인하여 동기가 맞지 않는 경 우가 발생한다. 이러한 동기 불일치 문제가 발생하였 을 경우 편집 과정에서 그림 6,7에서와 같이 수작업을 통해 필드 단위, 또는 프레임 단위로 삭제하거나 추가 시킴으로서 동기를 맞춰줄 수 있다.
그림 6. Sound Waveform을 이용한 좌,우 영상 동기화 Fig. 6 Synchronization using Sound Waveform
그림 7. Motion 정보를 이용한 좌, 우 영상 동기화 Fig. 7 Synchronization using motion
3.3.2 기하학적 왜곡 보정
3D 입체영상 제작에 있어서 후반 작업의 업무량은 전적으로 영상 획득을 위한 촬영 단계에 달려 있다고 해도 과언이 아니다. 기본적으로 기하학적 왜곡 없이 촬영된 입체 영상은 확실히 후반 작업에서 편집하기 가 수월하다. 그러나 촬영 현장의 여건이나 촬영자의 능숙도 또는 불완전한 리그 시스템 등 여러 가지 요 인에 의해서 좌안, 우안 영상의 기하학적 왜곡이 발생 한다. 기하학적 왜곡은 그림 8,9에서와 같이 수평, 수 직 정렬이 안 맞거나 또는 컨버젼스에 의해 발생하는 키스톤 왜곡과 과도한 입체감을 유발하는 좌,우 영상 의 커다란 변이값이다.
그림 8. Convergence/Alignment 보정 Fig. 8 Convergence/Alignment correction
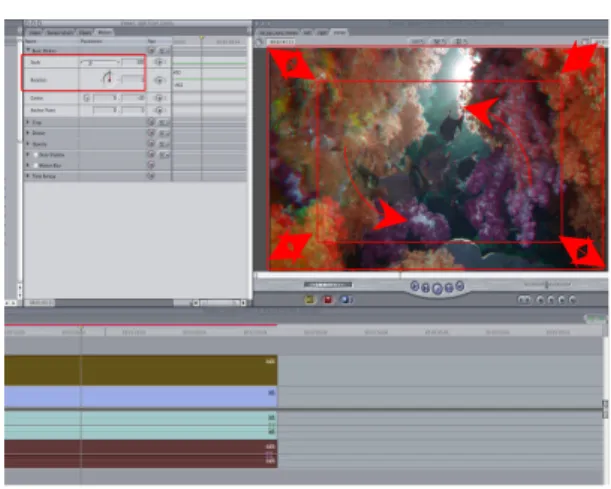
그림 9. Rotation/Size 조정 Fig. 9 Rotation/Size correction
그림 10에서와 같이 입체영상 촬영 방식은 크게 평 행식과 복합식, 폭주식으로 구분되는데 키스톤 왜곡은 폭주(Convergence) 방식, 복합식으로 촬영된 영상에서 발생되는 현상으로 상, 하, 좌, 우 모서리에서 크게 발 생 된다. 이는 촬영 시 관련 정보를 기록해 보정하지 만 영상으로부터 카메라 정보를 계산해 왜곡 정보를 추정하는 기술이 활용되기도 한다.
그림 10. 입체영상 촬영 방식 Fig. 10 Stereoscopic shooting types
그림 11은 폭주 방식으로 촬영된 입체영상에서 키 스톤 왜곡 현상을 보여준다. 그림에서와 같이 수평, 수직 중심선을 중심으로 각 모서리로 갈수록 수직 오 차가 크게 발생되는 것을 확인 할 수 있다. 본 연구에 활용한 3D 촬영 장비는 한쪽 카메라가 고정된 형태의 복합식 리그이다. 따라서 그림과는 달리 한쪽 영상에 서만 키스톤 왜곡이 발생하였으며 그림 12와 같이 편 집 툴의 코너핀 효과를 적용하여 키스톤 왜곡을 보정 하였다.
그림 11. keystone 왜곡 Fig. 11 keystone distortion
그림 12. 코너핀을 이용한 키스톤 왜곡 보정 Fig.. 12 keystone correction using corner pin
3.3.2 색 보정
3D 입체영상을 제작함에 있어서 동기화 작업과 더 불어 중요하게 고려해야 될 부분이 색 보정이다. 시청 자들이 입체영상을 관람할 때 피로감을 느끼는 여러 요인 중 하나이기 때문에 후반 작업에서 좌, 우 카메 라의 색상차를 보정해 줘야한다. 입체영상을 촬영하는 시스템은 크게 수평식 방식과 직교식 방식이 있는데 직교식 방법으로 촬영했을 경우 하프미러를 이용하기 때문에 좌, 우 영상의 색상 차가 일반적으로 크게 나 타난다. 편집 과정에서 이러한 색상차를 보정하기 위 해서는 좌, 우 영상을 동시에 봐가며 보정해야한다.
따라서 색상 차 보정 전 단계로 좌, 우 영상을 side by side 형태로 만들어 준다. 이 후 좌,우 영상에 Color Correction 3-way 적용 색보정을 이용하여 좌
영상을 기준으로 정교하게 좌, 우 영상의 색보정 작업 을 수행하게 된다. 색보정을 수행 한 후 디스플레이 형태에 따라 side by side, 적청방식(anaglyph) 등 다 양한 형태의 3D 파일로 출력을 통해 입체 영상 제작 을 완료할 수 있다.
그림 13. Color Correction 3-way 적용 색 보정 Fig. 13 Color Correction 3-way
Ⅳ. 결론
3D 수중 촬영은 수중이라는 특수성과 화려한 색감, 다양한 해양 생물, 심해의 미개척지 등 헤아릴 수 없 을 정도로 많은 촬영 소재들이 있다. 기존의 육상 3D 촬영에 국한된 연구 및 콘텐츠 제작이 수중으로 확대
되기 위해서는 수중의 특성을 잘 이해하고 수중 3D 촬영을 위한 촬영 문법과 기술들이 꾸준히 연구되어 야 한다. 본 논문에서는 기존 육상 3D 촬영을 위한 입체값 설정 방법을 수중에 맞게 새로운 입체값 설정 방법을 제시하였다. 즉, 해수의 매질에 따른 실제 거 리와 화면상 거리 차가 다름에 따른 입체값 설정을 새로이 적용하였다. 또한 실제 수중 3D 콘텐츠 제작 을 위한 후반 작업을 통해 수중 3D 콘텐츠를 제작하 였다. 제작한 수중 3D 콘텐츠는 지난 시그래프아시아 2010에 전시하여 많은 호평을 받았으며 수중 3D 콘텐 츠에 대한 많은 관심을 확인할 수 있었다. 향후 수중 조명에 따른 입체 효과와 다양한 콘텐츠 제작을 위한 미세 촬영 및 특수 효과에 대한 연구를 통해서 시청 자들에게 피로감은 덜 느끼면서 생동감 있는 수중 입 체 영상 제작이 가능할 것으로 기대된다.
감사의 글
본 논문은 2011년도 남서울대학교 연구년지원으로 수 행되었음.
참고 문헌
[1] http://uwcam.com
[2] 손인식, “텔레비젼 수중촬영기법에 관한연구”, 중앙대학교 신문방송대학원 석사논문 2004.
[3] 이현석, “수중사진의 실제 촬영에 관한 연구”, 경성대 멀티미디어정보예술대학원, 석사학위논 문, 2000.
[4] 박재정, “텔레비전 수중촬영의 전문성 제고를 위한 연구”, 중앙대 신문방송대학원, 석사학위논 문, 2004.
[5] 호요성, 김성열, “3DTV 3차원 입체영상 정보처 리,” 두양사, 2010.
[6] 김상일, "3D방송콘텐츠 제작", 방송공학회지, 15 권, 2호, pp. 7-13, 6, 2010.
[7] 조병철, "3D콘텐츠 제작을 위한 3D 촬영용 리 그 국내외 동향과 활용", 방송공학회지, 15권, 2 호, pp. 60-72, 6, 2010.
[8] 최양현, "입체영상콘텐츠 촬영기술의 워크플로우 에 관한 연구", 한국방송공학회, pp. 50-65, 2009.
[9] 이승현, “3D 콘텐츠 제작 및 편집기술”, 한국방 송공학회, 방송공학회지, 제15권, 제2호, pp. 60- 72, 6, 2010.
[10] Bernard Mendiburu, “3D Movie Making:
Stereoscopic Digital Cinema from Script to Screen,”Focal Press, 2009 Elsevier, Inc.
[11] http://www.nandj.jp/Stereo_3D_and_Mac [12] http://www.reald.com
저자 소개
김상훈(Sang-Hoon Kim)
1999년 인하대학교 전자공학과 (학사)
2002년 : 중앙대학교 첨단영상대학 원(영상공학석사)
2008년 중앙대학교 첨단영상대학원(영상공학박사) 2008년~2009년 성균관대학교 ISRC 연구원
2009년~2010년 연세대학교 TMS기술사업단 연구원 2010년~현재 제주한라대학교 방송영상과 교수
※ 관심분야 : 3D 입체영상, 증강현실(AR), 영상처 리, 컴퓨터 비전 등
김태은(Tae-Eun Kim)
1989년 중앙대학교 전기공학과 졸 업(공학사)
1992년 중앙대학교 전자공학과 졸 업(공학석사)
1997년 중앙대학교 전자공학과 졸업(공학박사) 1995년 삼성전자 휴먼테크논문 대상은상수상 1997년 영상처리관련 3건의 특허취득확정 1993~1996년 한국재단참여연구원
1997~현재 남서울대학교 멀티미디어학과 교수
※ 관심분야 : 멀티미디어시스템, 영상인식, 증강현 실, 웹3D처리기술
![그림 4는 RealD 사의 입체계산기이다[12]. 위와 같은 어플리케이션은 3D 효과에 대한 최적의 매개 변수를 결정하는데 도움을 주지만 수중 3D 촬영 에 있어서는 조명과 빛이 통과하는 매질의 차이 때문 에 생기는 변수를 제대로 반영하기가 힘들다](https://thumb-ap.123doks.com/thumbv2/123dokinfo/5419254.425753/4.765.412.691.747.912/입체계산기이다-어플리케이션은-효과에-최적의-결정하는데-있어서는-통과하는-반영하기가.webp)