Research Paper 지상무기 부문
단위임무 기반 로봇의 임무 계획 및 자동화 임무 관리 방법론
이호주1)․박원익*,1)․김도종1)
1)국방과학연구소 국방무인기술센터
Unit Mission Based Mission Planning and Automatic Mission Management for Robots
Ho-Joo Lee1)․Won-Ik Park*,1)․Do-Jong Kim1)
1)Defense Unmanned Technology Center, Agency for Defense Development, Korea
(Received 2 October 2013 / Revised 8 January 2014 / Accepted 17 January 2014)
ABSTRACT
In this paper, it is suggested a method of mission planning and management for robots based on the unit mission. In order to make robots execute given missions continuously as time goes by, a new concept for planning the mission which is composed of one or more unit missions and an automatic mission management scheme are developed. For managing robot’s missions in real time, six management methods are devised as well in order to cope with the mismatches, which occur frequently during the mission execution, as to the initial plan. Without the operator’s involvement, any mismatch can be adjusted automatically by applying one of the mission management methods. The suggested concept of mission planning and mission management methods based on the unit mission are partially realized in the Dog-Horse robot system and it is checked that it can be a viable one for developing effective robot operation systems.
Key Words : Robot(로봇), Mission Planning(임무계획), Mission Management(임무관리), Autonomous Navigation(자율주행)
1. 서 론
미래전은 지상․공중․해상 외에도 사이버 및 우주 를 포함한 5차원의 전장에서 원거리/비대칭의 분산전 력을 활용하여 개별 플랫폼(Platform) 보다는 네트워크 중심전(NCW : Network Centric Warfare)으로 변화될 것
*Corresponding author, E-mail: [email protected]
Copyright ⓒ The Korea Institute of Military Science and Technology
이다. 네트워크 중심전의 구성요소에는 유인체계 외에 도 무인체계가 고려되고 있으며, 최첨단 과학기술의 발전 및 인명 중시 사상이 보편화되면서 그 중요성이 부각되고 있다. 한국군은 최근 무인체계의 군사적 활 용을 위하여 그 운용개념 정립 및 전력화를 점진적으 로 고려하고 있는데, 그 예로써 합참의 ‘합동개념요구 능력서(합동무인전투)’를 들 수 있다. 다양한 무인체계 중에서도 무인차량은 감시경계, 전투 및 특수(지뢰탐 지 등) 분야에서 그 활용도가 높다. 현재 국방과학연
Fig. 1. Mission construction by combining unit missions 구소를 중심으로 추진되고 있는 견마형 로봇(이하 ‘견
마로봇’) 기술개발 사업은 향후 무인차량에 적용 가능 한 핵심 로봇기술을 개발함으로써 무인체계의 군사적 적용을 기술적 토대를 마련하고 있다.
무인체계 또는 로봇의 군사적 활용으로 기대되는 효과로는 전투원의 피해를 최소화하고 필요시 병력을 대체할 수 있으며, 나아가서는 유인 보조 및 무인체계 간의 협업을 통하여 전투시너지효과를 창출할 수 있 다. 하지만, 그것의 실질적인 발휘를 보장하기 위해서 는 무인체계 운용을 위한 임무계획 관련 기술의 개발 이 요구된다. 우선 다수의 로봇을 대상으로 각각의 로 봇에 대하여 다중 임무를 부여하는 임무계획 및 그 관리가 필요하다[1]. 이는 적시적절한 운용자 개입 또 는 필요시 자동적인 임무계획의 수정/변경을 통하여 임무 수행의 단절을 방지하고 적정 수준의 로봇의 자 율성을 보장하기 위함이다[2].
본 논문에서는 무인차량 외에도 다양한 로봇에 적 용 가능한 로봇의 임무계획과 그 자동화 관리 방법을 제안한다. 제안된 방법의 기본 개념은 우선 로봇에게 부여 가능한 최소 단위의 임무 구성요소를 단위임무 (unit mission)로 식별하고 그것들의 조합으로 임무를 구성하는 것이다. 또한, 임무계획 방법은 로봇이 임무 를 수행함에 있어서 계획 대비 불일치가 발생할 경우 운용자 개입 없이도 그 불일치를 해소하기 위하여 임 무계획의 수정/변경 및 단위임무별로 그 수행 특성을 고려하여 로봇의 운용모드를 자동적으로 최적 설정하
는 방법을 포함한다.
본 논문의 구성은 다음과 같다. 2장에서 단위임무를 기반으로 임무를 구성하는 개념과 그 방법에 대하여 기술하고, 3장에서는 실시간적으로 임무 수행 간에 있 어서 계획 대비 불일치가 발생되는 경우에 대한 임무 관리 방법론을 제안한다. 4장에서는 제안된 방법론을 견마로봇의 지통통제스테이션에 구현한 결과를 보여 준다. 마지막으로, 결론은 마지막 5장에 기술하였다.
2. 단위임무 기반 로봇의 임무 계획
로봇에게 부여 가능한 임무는 그 로봇의 개발 목적, 형상, 크기, 자율수준 등 여러 가지 고려요소에 따라 서 결정된다. 로봇을 운용함에 있어서 그 임무는 특정 시간 및 장소에서 하나의 유형(또는 종류)의 단편적인 것일 수도 있으며[3], 필요시 운용자 개입을 최소화하 면서 시간 순차적․지속적으로 여러 가지 것들일 수 도 있다. 일반적으로 임무는 유인체계에서도 확인되듯 이 서로 상이한 수행 특성을 갖거나 독립적인 하나 이상의 일 또는 과업(task)으로 구성된다. 본 논문에서 는 임무의 구성요소를 단위임무(UM : Unit Mission)로 식별하여 그것들을 조합함으로써 임무를 계획하는 방 법을 제안한다.
단위임무 기반의 임무를 구성하는 방법은 로봇의 임 무장비 관리, 전원관리 등 운용성 측면에서도 매우 유
Fig. 2. An example : the description of a mission planning 리하다. 로봇이 각각의 단위임무를 수행할 때 그 수행
특성을 고려하여 운용모드 및 임무장비 관련 설정을 변경, 적용할 필요가 있는데, 단위임무 기반으로 임무 를 계획할 경우, 각 단위임무에 가장 부합되는 임무장 비 및 운용모드를 사전에 최적화 설정하고, 상이한 단 위임무가 수행될 때 자동적으로 변경 적용하도록 함 으로써 불필요한 운용자 개입을 줄일 수 있기 때문이 다. 일례로, 견마로봇의 경우에는 단위임무를 이동감 시, 고정감시, 이동, 지뢰탐지, 대기의 다섯 가지로 식 별하였으며, 각 단위임무별로 운용모드를 최적 설정한 후, 단위임무가 전환될 때 자동적으로 변경 적용하도 록 설계한 바 있다. 이 때 이동을 포함하는 단위임무 에 대해서는 그에 부합되는 경로 생성을 포함할 것이
요구된다[4-6].
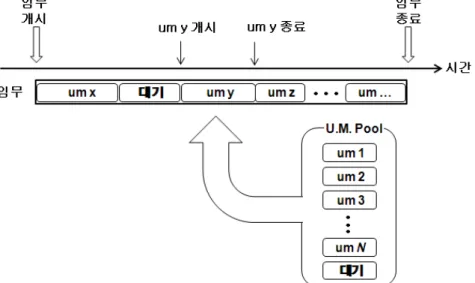
단위임무를 조합하여 로봇의 임무를 구성하는 방법 은 Fig. 1로 표현될 수 있다. 로봇의 임무는 사전에 식별된 단위임무 풀(U.M. Pool)에서 그 임무 달성에 필요한 단위임무들을 선택하여 배치하는 것으로 이해 될 수 있다. 그림에서는 N개의 단위임무들 외에 ‘대 기’라는 단위임무를 추가로 식별하였는데, 그 이유는
임무의 수정/변경과 밀접한 관련이 있기 때문인데, 다 음 장에서 기술한다.
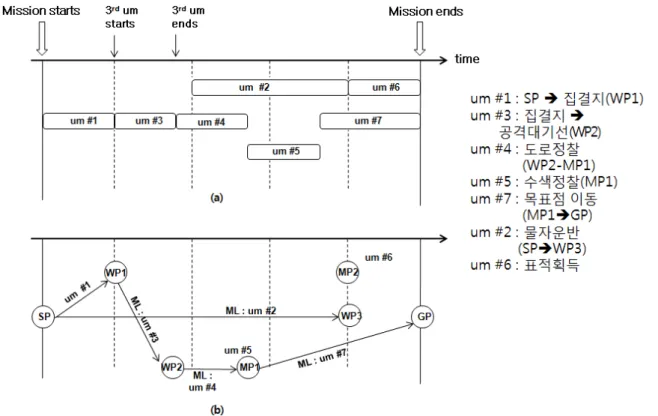
운용자가 로봇의 임무를 계획함에 있어서 그것에 대한 표현 방법도 고려할 필요가 있다. 임무가 하나의 단위임무로만 구성되지 않고 다수 개로 구성되며, 그 것들을 두 대 이상의 로봇을 통합 운용함으로써 수행 하도록 임무를 계획할 경우에는 더욱 그러하다. Fig. 2 는 7개에 단위임무로 구성된 임무를 표현하는 두 가 지 예를 보여준다. 그 7개의 단위임무들은 각기 그 수 행 장소 및 개시/종료시각이 상이하다. 수행되는 장소 를 보면, 출발지(SP : Starting Point), 집결지(WP1), 공 격대기지점(WP2), 임무점 #1(MP1), 임무점 #2, 물자운 반 지점(WP3) 및 목표지점(GP)으로서 7개의 장소로 구분된다. 이와 같은 임무를 Fig. 2-(a)와 같이 차트형 으로 표현하면, 각각의 단위임무가 수행되는 개시/종 료시간은 도시되나, 그 장소 및 타 단위임무와의 상관 관계를 나타내기에는 제한이 있다. 반면, Fig. 2-(b)는 네트워크형으로 임무를 표현한 것이다. 단위임무와 관 련된 장소를 노드(node)로, 이동과 관련된 사항을 아 크(arc)로 정의함으로써, 장소, 시간 정보 외에도 아크
의 방향성을 통하여 노드 간의 상관관계도 추가할 수 있다. 임무를 계획하기 위한 그 표현 방법은 이 외에 도 다양하나, 본 연구에서는 문제 제기 정도의 수준으 로 한정 기술한다.
3. 자동화 임무 관리 방법론
로봇의 임무를 계획한 후에 수행하는 단계에서 그 임무 수행 상태의 모니터링 및 임무의 관리는 적용되 는 임무 관리 방법에 의거 관련 장치들의 상호 작용 으로 가능하다. 임무 관리에는 임무의 수정/변경, 임무 의 취소, 재계획 등 여러 영역들이 포함된다. 본 연구 에서는 단위임무 기반의 임무 계획 방법에 의한 임무 를 수행함에 있어서 운용자 개입 없이도 지속적인 임 무 수행을 가능하도록 하는 임무 관리 방법론을 제안 한다. 그것은 단위임무에 대하여 각종 제약조건을 고 려하여 운용자 개입 없이도 실시간적으로 자동적인 임무의 수정, 변경, 취소 등에 대한 것으로서, 단위임 무의 관리를 통하여 전체적인 임무 관리가 가능하도 록 해준다.
단위임무 관리를 위하여 6가지의 임무 관리 방법을 제안한다. 그것들은 대기(stand-by), 견인(pull), 연장 (extension), 순연(deference), 취소(cancel) 및 단축(cut)이 다. 그 중 세 가지를 Fig. 3-(a)를 참조하여 구체적으로 살펴보면, 단위임무 x가 계획된 종료시점보다 조기에 종료될 경우(가), 그에 후속하는 단위임무 y를 계획된 시간에 수행하기 위하여 ‘대기 ’라는 단위임무를 삽입 (나)하여 단위임무 y의 개시시각을 준수하거나; 단위 임무 y의 개시시각을 단위임무 x의 종료 시각으로 변 경 적용하고 조기 수행하도록 단위임무 y를 ‘견인 ’하 거나(다); 단위임무 x가 조기 종료 가능함에도 불구하 고 후속하는 단위임무 y의 개시시점까지 지속하도록 그 종료시각을 수정함으로써 ‘연장 ’(라)할 수도 있다.
또한, Fig. 3-(a)과는 반대의 경우로서, Fig. 3-(b)를 참고로 나머지 세 가지 임무 관리 방법에 대하여 설 명한다. 단위임무 x가 계획된 종료시각보다 지연 종료 되는 경우(가)에 그 후속하는 단위임무 y의 개시시각 을 x의 종료시점으로 수정함으로써 y를 ‘순연 ’하거나 (나); 후속하는 단위임무 y를 수행하지 않기 위하여
‘취소 ’하고(다) 대기하거나; 후속하는 단위임무의 개 시시각을 x의 종료시점으로 변경하여 그 수행시간을
‘단축 ’(라)할 수도 있다.
제안된 임무 관리 방법에 의거 필요에 따라 운용자 개입 없이도 (단위)임무 관리를 가능하도록 하기 위하 여 아래와 같이 관련 부호를 정의하고 각 방법을 수 리적으로 정의함으로써 그 조건이 충족되면 적용함으 로써 로봇의 임무 관리를 자동화할 수 있다.
단위임무 i ( )
의 개시시각
의 종료시각
의 지속시각, 즉
max 의 최대 가능 지속시간
min 의 최소 요구 지속시간
≻ 두 단위임무 사이의 선후관계, 즉 ≻′
는 가 ′에 선행함을 의미
∅ 설정 값 없음
임무 관리 방법에 대하여 적용되는 조건은 두 개의 과업 와 ′를 대상으로 기술하며, 그 선후관계는
≻′과 같다.
대기
) ( i.e.,
, s' e
s' i i
i not t t
t ≠φ ← (1)
견인
φ
φ ≠
=
← e e' '
s' i & i & i
i t t m
t (2)
연장
]
satisfying
, when
or
&
[
&
max ' s
' e
' e
' max
' e' e s
'
i i i i
i i i
i i
m t t t
m m t
t t
≤
−
∃
≠
=
=
←
φ φ φ
(3)
순연
ime) duration t fixed
a (i.e.,
&
&
e' '
e
s'← i i =φ i ≠φ
i t t m
t
(4)
단축
] when
) ( satisfying
or [
&
min ' min
s ' e ' e '
' e' e s'
φ φ
≠
≥
−
∃
≠
←
i i
i i i
i i i
m m
t t t
t t t
(5)
(a) Cases of the delayed completion of a unit mission : stand-by, pull, extension
(b) Cases of the early completion of a unit mission : deference, cancel, cut Fig. 3. Concept of the automatic mission management
취소
]
when
) ( satisfying
[no
&
&
or ) (
min '
min s '
e ' e '
e ' e ' s'
e s'
φ φ
≠
≥
−
≠
←
←
i
i i i i
i i i
i i
m
m t t t
t t t
t t not
(6)
단위임무의 수정/변경은 그에 대하여 후속하는 하나 의 단위임무를 대상으로 제한할 수도 있으며, 필요시 후속하는 전체에 대해서도 적용할 수 있다. 이는 사전 에 운용자가 설정함으로써 가능하다. 또한, 임무에 포 함된 어떤 단위임무에 대하여 그 개시/종료/지속시간 과 관련된 제약을 고려함으로써 단위임무별로 수정/변 경 범위를 전체적 또는 부분적으로 설정 가능하도록 함은 실제 상황을 반영하여 단위임무 고유의 수행 특 성을 고려하기 위함이다.
Fig. 4. Procedure of the mission management
임무를 계획한 후, 그 실행에 있어서 어떻게 임무 관리가 수행되는지에 대한 그 절차는 Fig. 4와 같다.
로봇이 임무를 개시하여 수행함에 있어서, 현재 수행 하고 있는 단위임무가 마지막 것이면 그것이 종료됨 과 동시에 임무가 종료된다. 만일, 임무 수행에 있어 서 계획 대비 불일치 또는 예기치 못한 상황이 발생 되면 운용자 개입을 통하여 해결할 수도 있도록 적시
적절한 개입을 보장하여야 한다. 하지만 어떤 사유로 인하여 계획 대비 불일치가 발생되는 상황에서도 운 용자 개입 없이 지속적으로 임무가 수행되어야 될 때, 앞서 기술된 6가지 임무 관리 방법의 적용을 통하여 해결 가능하다.
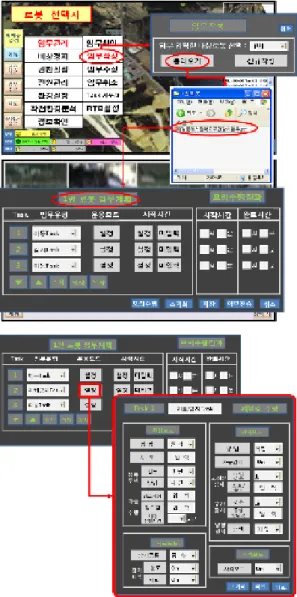
Fig. 5. User Interfaces of the mission planning &
management for the Dog-Horse robot
4. 실험적 구현 결과
제안된 단위임무 기반의 임무 계획 및 관리 방법은
견마로봇의 원격통제스테이션에 부분적으로 구현하여 그 효용성을 확인하였다. Fig. 5는 구현결과의 일부를 보여준다(구현결과에 대한 보안상의 이유로 그림의 해 상도를 조정하였음). 임무 계획 및 관리와 관련된 메뉴 는 원격통제스테이션에서 주변에 배치된 핫키(hotkey) 및 화면 상의 터치버턴을 통하여 접근 가능하다. 일례 로, 운용자가 특정 로봇을 선택한 후 임무를 계획할 경우, 기 식별된 단위임무들 중에서 그 임무 달성에 필요한 하나 또는 그 이상의 것들을 순차적으로 선택 하고 각각에 대하여 필요시 시간적 제약조건을 입력할 수 있다.
또한, 견마로봇의 경우에는 임무를 계획한 결과를 저장하고 불러올 수도 있으며, 호출한 계획에 대하여 수정도 가능하다. 주요시설에 대한 감시경계를 주요 목적으로 운용되는 견마로봇의 경우에는 운용자 개입 없이도 지정된 경로 또는 경유점을 따라 지속적으로 감시경계 임무를 수행하여야 하는데, 주의를 끌만한 상황이 아닐 경우 사실상 운용자 개입을 필요로 하지 않는다. 제안된 임무 계획 및 관리 방법의 적용을 통 하여 단절 없이 주야간 시설 감시경계 임무를 지속할 수 있음을 확인하였다.
5. 결 론
본 논문에서는 로봇이 수행하는 임무를 계획함에 있어서, 그 임무의 구성요소인 단위임무(Unit Mission) 를 식별하고 그것들의 조합으로 임무를 구성하는 방 법과, 계획 대비 불일치나 예기치 못한 상황이 발생될 경우 적시 적절한 운용자 개입을 보장하거나 아니면 운용자 개입 없이도 단위임무의 자동적인 수정/변경을 통하여 임무를 지속할 수 있도록 하는 임무 관리 방 법을 제안하였다.
제안된 방법의 적용을 통하여 불필요한 운용자 개 입을 방지할 수 있으며, 운용자 개입을 필요로 하지
않는 한 최초 계획 대비 불일치가 발생되더라도 자동 적으로 임무를 수정/변경함으로써 지속적인 임무 수행 가능하다. 또한, 단위임무 기반의 임무 계획 방법은 단위임무별로 운용모드를 사전에 최적화하여 자동적 으로 적용 가능하므로 전원관리 등 보다 효과적인 로 봇 운용을 가능하게 해 준다. 제안된 방법론은 견마로 봇에 부분적으로 구현되어 그 효용성을 확인하였으며, 본 연구 결과는 향후 로봇협업, 임무최적화 등 로봇의 임무통제 관련 분야에 활용될 수 있을 것이다.
References
[1] Kramer, T. A., et al., SPIE Unmanned Systems Technology VIII, 2006.
[2] Thorpe, C. et al., “Unmanned Ground Vehicle System Perception for Outdoor Navigation,” Technical Report TEC-0114, 1995.
[3] Ho-Joo Lee, Young-il Lee, Myung-Chun Lee,
“Mission Oriented Path Generation for Unmanned Combat Vehicle Based on the Mission Type and Multiple Grid Maps,” Journal of the Korea Institute of Militaty Science and Technology, Vol. 13, No. 2, pp. 180-187, 2010.
[4] Ho-Joo Lee, Young-il Lee, Yong-Woon Park, “User Interface for Unmanned Combat Vehicle Based on Mission Planning and Global Path Planning,” Journal of the Korea Institute of Militaty Science and Technology, Vol. 12, No. 6, pp. 689-696, 2009.
[5] Giesbrecht, J., “Global Path Planning for Unmanned Ground Vehicle,” DRDC Suffield TM 2004-272, 2004.
[6] Stentz, A., “Optimal and Efficient Path Planning for Partially Known Environments,” Proceedings of IEEE International Conference on Robotics and Automation, 1994.