A Study on the Action Scheme based on Context Awareness of Moving Wall for Smart Home
2006
A Study on the Action Scheme based on Context Awareness of Moving Wall for Smart Home
2007 6
2006
2007 7
감사의 글
우선 저에게 대학원에 입학하여 공부하고 또 지금까지 지도해주시고 논문까 지 잘 마치도록 인도해주신 김기두 교수님, 강동욱 교수님 그리고 정경훈 교수 님께 진심으로 감사 드립니다. 그저 배우겠다는 열정 하나를 크게 봐 주신 분이 있는 것이 저에게는 너무나 큰 영광이었습니다. 공부하면서 많은 부족한 부분이 있음에도 불구하고 계속적인 충고와 관심을 부어 주셔서 어떻게 감사를 드려야 될지 모르겠습니다. 또한 좋은 논문이 되도록 격려와 관심을 가져주신 김현수 교수님과 오정헌 박사님께 감사의 마음을 전합니다. 그리고 대학원 생활의 시작 부터 모든 일에 많은 도움을 주신 김수남 박사님께 진심으로 감사 드립니다.
2년 동안 저와 잘 지내준 실험실의 하나밖에 없는 동기인 준환이형과 후배지 만 항상 친구 같았던 성열이형, 희석, 금희, 이주, 진영 그리고 학부생이지만 많 은 일을 함께 했던 우리 외진이에게도 감사를 전하고 앞날이 창창하길 바랍니 다. 그리고 졸업하신 선배님들 모두에게도 감사를 드립니다.
대학원 생활 처음부터 저와 함께 지능형 홈 산업화 지원 프로잭트를 진행하 며 수고해준 다른 과 대학원생들에게도 감사 드리며 센터 직원분들께도 감사 드립니다.
힘든 나날 중에도 옆에서 지켜보며 심적으로 안정을 주었던 친구 하용, 진혁, 내윤, 성민등 그동안 함께 했었던 친구들에게도 영원한 우정을 기리며 고맙다는 말을 전하고 싶습니다.
마지막으로 철없는 아들을 적극 믿어주시고 끝없는 사랑을 주신 부모님 그리 고 부족한 동생을 잘 뒷바라지 해준 누나와 매형에게도 고마움을 전하며 이 논 문을 바칩니다.
이천 칠년 칠월 멀티미디어통신/신호처리 실험실에서 논문을 마치며...
차 례
차례 ···
그림 차례 ···
표 차례 ···
요약 ···
서론 ··· 1
상황인식 ··· 3
2.1 정의 ··· 3
2.2 응용 ··· 4
2.3 국외 기술 현황 ··· 6
2.3.1 Georgia Tech Future Computing Environment Group ··· 6
2.3.2 RCSM(Reconfigurable Context Sensitive Middleware) ··· 6
2.3.3 Aura ··· 6
2.3.4 SOCAM ··· 7
2.3.5 Ubiquitous Home ··· 7
2.4 국내 기술 현황 ··· 7
스마트홈 구성 요소 기술 ··· 9
3.1 위치 인식 ··· 9
3.1.1 무선 주파수 신호(Radio Frequency) ··· 9
3.1.2 적외선 신호 ··· 10
3.1.3 위성 위치 인식 시스템 GPS ··· 10
3.1.4 초음파 신호 ··· 10
3.1.5 압력 센서를 이용한 위치 인식 ··· 10
3.1.6 카메라를 이용한 위치 인식 ··· 11
3.1.7 PIR 센서를 이용한 위치 인식 ··· 11
3.1.8 모션센서를 이용한 위치 인식 ··· 11
3.2 UPnP(Universal Plag and Play) ··· 12
3.2.1 UPnP 구성요소 ··· 12
3.2.1.1 UPnP 디바이스 ··· 12
3.2.1.2 UPnP 컨트롤 포인트 ··· 13
3.2.2 UPnP 동작 단계 ··· 13
3.2.2.1 발견(Discovery) 단계 ··· 13
3.2.2.2 기술(Description) 단계 ··· 13
3.2.2.3 제어(Control) 단계 ··· 13
3.2.2.4 이벤팅(Eventing) 단계 ··· 14
3.2.2.5 프리젠테이션(Presentation) 단계 ··· 14
3.3 상황인식 학습 시스템 ··· 14
3.3.1 시스템 구성도 ··· 15
3.3.2 하드웨어 구성 모듈 ··· 15
3.3.2.1 컨텍스트 획득 및 제어 모듈 ··· 15
3.3.2.2 컨텍스트 데이터 통신 모듈 ··· 15
3.3.2.3 컨텍스트 데이터베이스 관리 모듈 ··· 16
3.3.3 소프트웨어 에이전트 ··· 16
3.3.3.1 컨텍스트 통신 에이전트 ··· 16
3.3.3.2 컨텍스트 데이터베이스 에이전트 ··· 16
3.3.3.3 사용자 선호도 추론 에이전트 ··· 16
3.3.3.4 서비스 에이전트 ··· 16
3.3.4 학습 및 서비스 실행 흐름도 ··· 17
3.4 RFID 시스템 ··· 17
3.4.1 RFID 시스템 구조 ··· 18
3.4.2 RFID 시스템에 기반을 둔 무선 센서네트워크의 구성 ··· 18
무빙월(Moving Wall) ··· 21
4.1 정의 ··· 21
4.2 용도 ··· 22
4.3 무빙월의 지능 등급 ··· 24
4.3.1 퍼지이론 고찰 ··· 24
4.3.1.1 퍼지측도(Fuzzy Measure) ··· 25
4.3.1.2 퍼지적분(Fuzzy Integral) ··· 26
4.3.2 구성요소 정의 ··· 27
4.3.2.1 지능성 구성요소 도출 및 정의 ··· 27
4.3.2.2 지능 등급 부여 모델 ··· 30
4.3.3 무빙월 지능 등급 ··· 31
무빙월 제어를 위한 상황인식 시스템 ··· 34
5.1 실험 환경 ··· 35
5.2 실험 측정 ··· 38
결론 ··· 43
참고문헌 ··· 45
Abstract ··· 48
부록 ··· 50
A 스마트홈 제어를 위해 구축되어 있는 홈페이지 ··· 50
B 약어 모음 ··· 51
그림 차례
그림 2.1 상황인식 활용 예 ··· 5
그림 3.1 학습시스템 네트워크 구조 ··· 14
그림 3.2 컨텍스트 학습 시스템 알고리즘 ··· 17
그림 3.3 RFID 시스템 구성도 ··· 19
그림 3.4 RFID 시스템 지원 무선 센서네트워크 구성도 ··· 20
그림 4.1 학교, 연회장에서 활용되고 있는 무빙월 ··· 22
그림 4.2 지능형 공간 시스템 ··· 23
그림 4.3 도출된 지능성 구성요소 ··· 27
그림 4.4 지능 등급 판정 ··· 33
그림 5.1 무빙월 테스트 베드 ··· 34
그림 5.2 무빙월 테스트 베드의 환경 센서 및 RFID Reader 설치 위치 ··· 35
그림 5.3 평균 CO2 농도 ··· 36
그림 5.4 평균 온도 ··· 37
그림 5.5 평균 습도 ··· 37
그림 5.6 세계 각국의 CO2에 대한 최대허용 한계농도와 실내 환경기준 ··· 38
그림 5.7 무빙월 동작 ··· 39
그림 5.8 무빙월을 이용한 공간 활용 방안 예 ··· 41
그림 A.1 홈페이지 메인 화면 ··· 50
표 차례
표 2.1 스마트홈의 환경에서의 상황 ··· 4
표 4.1 지능성의 구성요소 및 정의 ··· 28
표 4.2 Control & Decision ··· 29
표 4.3 Man-Machine Interface ··· 29
표 4.4 Self-Sensing ··· 30
표 4.5 Knowledge & Learning ··· 30
표 4.6 지능 등급 부여 모델 ··· 31
표 4.7 무빙월 측정 예 ··· 32
요약
유비쿼터스 기술을 이용한 스마트홈의 구현을 위한 연구는 인간들의 좀 더 편하고 즐겁고 안전한 삶을 위해서 꾸준히 진행되어 오고 있다. 그러나 기존의 연구는 개별적인 스마트 기기간의 단순한 네트워킹이나 조작의 편리성 증진을 목적으로 하고 있기 때문에 이러한 스마트홈은 실용성을 살린 주택 이라기보다 는 첨단가구, 가전 전시장과 같은 느낌이 든다. 최근에는 이를 넘어서서 사용자 상황에 맞춰 스스로 조절하는 능력을 가진 시스템이 요구되고 있으며, 무빙월, 슬라이딩 도어등 공간 활용도를 높이는 연구가 많은 주목을 받고 있다.
본 논문에서는 스마트홈의 공간 활용도를 높이기 위해 사용 환경 및 사용자 상황에 따른 무빙월의 동작 방안을 연구하였다. 먼저 무빙월의 편리성과 유용성 을 객관적으로 쉽게 판단하기 위해 퍼지이론을 적용하여 지능 등급을 결정하는 방법을 제시하였다. 또한, 이러한 공간 활용을 높이기 위하여 스마트홈 센터 내 에 무빙월을 설치하여 동작 방안을 제시하였다. 테스트베드의 구축을 통하여 환 경 센서를 이용한 CO2 농도등 환경변수의 변화를 측정하고 동시에 RFID를 통 한 사용자의 위치 변화를 실험 하였다.
구성원의 상황을 인식하여 동작하는 무빙월을 통하여 유비쿼터스 주택들이 보다 나은 삶을 위한 환경을 만들 수 있음을 볼 수 있다.
키워드: 상황인식, 무빙월, 스마트홈, 지능 등급
Ⅰ. 서 론
사람들은 다른 사람을 대할 때나 환경에 적응할 때 그 때의 상황을 파악하여 행동하게 된다. 예를 들면 귀가 안 좋은 사람과는 수화로 이야기를 하고, 조용한 장소에서는 목소리를 낮춰서 이야기 하는 것처럼 인간은 주변 상황에 따른 행동 을 한다. 하지만 사람과 달리 컴퓨터는 자연스럽게 주변 정보를 파악하지는 못 하며, 주변 상황의 함축적인 의미를 이해하기 보다는 인간이 지시한 사항에 따 라 결정하고 작동하는 스스로 적응할 수 없는 한계를 지금까지도 가지고 있다.
이러한 현실에서 현재의 컴퓨팅 디바이스와 네트워크 기술의 발전은 과거의 컴 퓨터 한계를 극복할 수 있는 원동력이 되고 있다.
IT 기술의 급속한 발달과 초고속망을 통한 인터넷 보급에 힘입어 기업이나 공 공기관의 사무실 중심으로 구축되던 네트워크 환경이 가정으로 확산되어 주택과 주택의 내부를 구성하는 전자기기들이 네트워크로 연결돼 홈네트워크가 유비쿼 터스의 주요 구현 대상공간으로 대두되고 있다. 현재 시범적이긴 하지만 활발히 구축되고 있는 홈네트워크 시범주택은 건설, 가전, 통신네트워크, 소프트웨어 솔 루션 회사 등이 모두 참여하는 디지털 컨버전스의 대표적 응용분야이기도 하다.
특히, 홈네트워크가 어떤 일들을 가능하게 하는지에 대해서 다양한 기관이 제 시한 시나리오를 분석하여 보면 유비쿼터스 환경 하에서 상황을 인식하여 (context awareness) 사용자의 사용성과 편리성을 높일 수 있는 똑똑한 홈네트워 크를 사용하고 있다. 또한, 똑똑한 홈네트워크를 구현하기 위해서 지능형 홈을 구성하는 각각의 기기에 대해서도 지능성이 중요한 요소가 된다.
유비쿼터스 시대에는 다양한 컴퓨팅 디바이스를 통해서 주변 상황에 대한 정 보를 보다 쉽게 제공받고 이에 따라서 다양한 기기를 제어할 수 있게 될 것으로 전망된다. 이것은 스마트 기기들과 같은 사물들이 상황정보를 인식하고 판단하 여 인간에게 보다 능동적이고 유용한 서비스를 제공할 수 있게 된 것을 의미하 기도 한다. 이와 같은 상황인식 기술은 현재 많은 분야에 걸쳐 연구되고 있다.
그러나 이러한 위치인식을 위한 주택들은 실용성을 살린 주택보다는 첨단가 구, 가전 전시장과 같은 느낌이 든다. 비싼 마감재나 제품을 적용하기 보다는 공간 활용도를 높여 입주자들이 편하게 살 수 있는 주택을 만드는데 주력해야 할 것이다. 이러한 연유로 무빙월(moving wall)을 설치해 간단한 조작만으로 주 택 공간에 변화를 줄 수 있는 지능형 평면으로 거실과 방을 설계 하면 보다 공간 활용도가 증가한다.
본 논문에서는 이러한 공간 활용을 높이기 위한 시나리오를 통해 무빙월과 센서를 이용한 위치 인식을 이용해 유비쿼터스 환경의 주택들이 보다 나은 삶 의 환경을 위한 방안을 제시하고 정확한 위치 인식을 위한 센서의 활용 방안 을 제안한다.
Ⅱ. 상황인식
2.1 정의
앞으로 다가올 유비쿼터스 시대의 응용 및 서비스는 컴퓨팅 및 커뮤니케이션 능력을 가진 스마트 객체들이 동적인 환경 변화를 인식하고 이에 적응할 수 있 는 상황인식 특성을 갖게 될 것이다. 여기서 다뤄지고 있는 상황이란 다양한 관 점에서 바라볼 수 있는데, 그중에서 가장 보편적인 것이 A. K. Dey에 의해서 다음과 같이 정의되었다[1].
“상황정보는 객체의 상황을 특징지을 수 있는 가용한 모든 정보라 할 수 있다. 여기서 객체는 사용자와 응용 사이의 상호작용에 관계된 사 람, 장소, 사물 등을 의미한다.”
즉, 상황정보는 사용자가 상호 작용을 하는 시점에서 가용한 거의 모든 정보라 고 할 수 있다. 또한, 상황정보는 응용 운용 환경의 일부로 사물이 감지할 수 있는 정보를 가지는데, 일반적으로 사람, 그룹, 객체의 위치, 식별, 활동, 상태 등을 포함한다[2]. 상황인식 서비스는 이러한 상황정보의 수집 및 교환을 통해 상황을 인식하고, 해석 및 추론과 같은 처리 과정을 거쳐 사용자에게 이에 관련 된 정보나 서비스를 제공한다.
이 외에도 상황인식 컴퓨팅(context awarecomputing)은 1994년 Schilit와 Theimer 에 의하여 논의되었으며, 그 당시 상황인식 컴퓨팅을 ‘사용 장소, 주변 사람과 물체의 집합에 따라 적응적이며, 동시에 시간이 경과되면서 이러한 대상의 변화 까지 수용할 수 있는 소프트웨어’로 정의하였다[3][4][5]. 그리고 이후의 지나친 특정적인 정의를 제외하고 가장 개선된 상황인식은 ‘사용자의 작업과 관련 있는 적절한 정보 또는 서비스를 사용자에게 제공하는 과정에서 상황을 사용하는 경
우 이를 상황인식 시스템으로 정의’할 수 있다. 이러한 상황의 종류는 일반적으 로 5개의 분야로 분류할 수 있으며, 스마트홈의 환경에서는 표 2.1과 같이 적용 된다[6].
표 2.1 스마트홈의 환경에서의 상황
상황 분류 스마트홈의 환경에서의 상황
사용자 상황 • 신원 상황(ID, 이름)
• 신체 상황(맥박, 혈압, 체온, 음성)
물리적 환경 상황
• 공간 상황(위치, 방향, 속도) • 시간 상황(일자, 시각, 계절) • 환경 상황(온도, 습도, 조도, 소음) • 활동 상황(인접인, 행동, 일정)
컴퓨팅 시스템 상황
• 가용 자원(배터리, 디스플레이, 인터넷, 시스템) • 가용 상황(자원, 장비, 시설)
• 접근 상황(사용자, 허용정보, 인접성)
사용자-컴퓨터 상호 작용 • 이력 상황(사용자, 서비스, 시간) • 장애 상황(시간, 사용자, 서비스)
기타 미분류 상황 • 기타 미분류 상황
2.2 응용
상황인식은 다음과 같은 분류를 통하여 특징이 되는 경향을 추출하고 이를 일반화시켜 상황인식의 응용으로 접근할 수 있다[7][8].
① 사용자에게 정보와 서비스 제공
② 사용자를 위한 서비스 자동 실행
③ 이후 검색을 위한 상황 정보의 표시
이러한 일반화된 상황인식의 분류를 통하여 상황인식 서비스가 지원해야 하 는 행동과 특징, 그리고 이를 수행하기 위한 요구사항을 개발자가 쉽게 결정할 수 있게 된다. 상황인식 서비스가 지원해야 하는 행동과 특징, 그리고 이를 수 행하기 위한 요구사항을 개발자가 쉽게 결정할 수 있게 된다. 상황인식 서비스 개발자는 설계에서 실제 구현으로 연결되는 과정에서 두 가지 접근 방법을 이 용할 수 있다. 하나는 설계자가 구조적인 응용 또는 특징을 조합하여 응용을 구 축하는 접근 방법과 다른 하나는 설계자가 대상이 되는 응용을 좀 더 높은 차 원에서 생각할 수 있도록 추상화 하는 접근 방법이다.
이러한 접근 방법을 지원하는 기술로는 상황인식 응용 개발 도구 기술이 요 구 되는데 이 기술에 포함될 내용으로는 상황의 획득과 접근, 상황인식 응용에 독립적인 상황인식 정보의 저장, 배포 및 실행이 포함되어야 한다. 또한 상황 정보의 추상화를 위한 기술, 상황 정보를 해석하는 기술, 그리고 유사한 상황 정보를 수집 하는 기술의 3가지 기술 요소가 기본적으로 필요하며, 이에 따른 다양한 연구가 진행되었다[9][10][11]. 그림 2.1은 이러한 상황 인식을 위치인식 및 다른 상황들을 인식하여 서버에서 제어할 수 있는 시스템들의 예를 나타낸 것이다.
바이오 리듬에 따른 뮤직 테라피 제공
온도/습도/Co2 센서
바이오리듬 날씨 정보 주식 정보 뉴스 정보 외출복 코디 추천 음식 정보
지능형 정보 검색 서버/
Context Aware 지능형 정보 검색 서버/ 서버
Context aware 서버 RG
그림 2.1 상황인식 활용 예
2.3 국외 기술 현황
2.3.1 Georgia Tech Future Computing Environments Group
국외에서 상황인식 기반 기술에 대하여 진행하는 대표적인 기관으로는 미국 의 Georgia Tech Future Computing Environments Group이 있다. 이 연구기관의 대 표적인 결과물로는 ContextToolkit (CT)[6]이 있는데, CT는 센서로부터의 정보를 상황화시키는 상황도구(contextwidget), 여러 개의 상황도구들로부터 정보를 취합 하는 서버, 또한 상황도구나 서버로부터의 상황을 다시 취합하여 고수준의 상황 으로 처리하는 해석기로 구성되어 있다. CT는 이 세 가지 주 컴포넌트를 이용 하여 응용에 필요한 상황을 제공하긴 하지만 각 응용에 특화된 상황 제공에 대 한 연구는 아직 미비한 실정이다.
2.3.2 RCSM(Reconfigurable Context Sensitive Middleware)
애리조나 주립대에서는 상황의 효율적인 처리를 위한 상황 기반 인터페이스 정의 언어(interface definition language)를 새롭게 설계하고 있으며, 현재 진행 중 인 대부분의 상황인식 관련 프로젝트는 각종 상황의 표현과 이기종 장치간의 상황 전달에 관한 표준화와 이를 위한 세부모듈에 대하여 연구하고 있다.
2.3.3 Aura
카네기 멜론 대학에서는 유비쿼터스 환경의 구축을 위한 프로젝트로서 Aura 를 진행 중이다. Aura 프레임워크에서는 전체적으로 각 모듈의 협동을 관리하는 작업관리자, 상황을 감지하는 상황 감시자, 각 환경에서의 가능한 서비스를 관 리하는 환경 관측자, 그리고 서비스를 제공하는 서비스 제공자가 각각의 물리적 인 유비쿼터스 환경에 존재한다. 이 프로젝트는 사용자의 이동성을 지원하면서
사용자가 원하는 서비스를 끊김 없이 제공하는 것을 주목표로 하고 있다.
2.3.4 SOCAM
싱가포르 국립대학에서는 스마트홈 환경에서 빠르게 어플리케이션을 만들고 빠르게 표본을 만들기 위해 상황인식을 위한 인프라스트럭처를 제안하였다. 시 멘틱 웹(Semantic Web)과 OWL(Ontology Web Language)을 이용한 온톨로지 기반 의 모델을 제안하여 컨텍스트 공유와 컨텍스트 추론을 가능하게 하였다. 분산된 컴포넌트 사이의 통신은 Java RMI를 이용하였고, 컴포넌트 실행을 위해서는 Java Virtual Machine이 필요하다.
사용자의 여러 가지 컨텍스트를 이용하여 사용자의 상황을 추론하고 미리 사 용자가 정의한 법칙(rule)에 의해 서비스를 제공한다[12].
2.3.5 Ubiquitous Home
일본 정보통신 연구소에서는 다양한 관점에서의 홈서비스 연구를 위해 다양 한 센서들을 사용하여 사용자의 컨텍스트를 파악하였다. 사용자의 위치를 파악 하기 위해 바닥 압력센서와 RFID(Radio Frequency Identification) Tag를 사용하였 다. 사용자의 메일과 냉장고 식품들을 사용자와 가장 가까이에 있는 모니터를 통해 보여줌으로써 위치기반의 서비스를 제공하였다[13].
2.4 국내 기술 현황
한편 국내에서는 전반적으로 상황인식 기반 기술에 대한 연구가 미비한 실정 이다. 상황 정보를 추론할 수 있는 추론 기술과 관련된 추론 기법 연구는 기존 의 자연언어처리 분야에서 많은 연구가 되었으며, 전문가 시스템, 문서분류 시 스템이나 문서 요약기와 같은 세부 분야에서 지식 추출, 탐색, 추론, 문제해결
등을 위하여 적용되었다. 그러나 상황을 처리하는 상황 관리에 대한 연구와 상 황을 이용한 추론 기법에 대한 연구가 미비한 상황이다.
광주과학기술원에서는 통합된 어플리케이션 서비스 모델(ubiHome)을 개발하 여 지능적인 상황인식을 이용함으로써 각 사용자에게 영화, 메일, 카메라 모니 터링 등 사용자 중심의 개인화된 서비스를 제공하였다. 사용자가 ubiKey라는 열 쇠를 사용함으로써 개인화된 서비스를 제공하지만 집안 내에서 동시에 여러 사 람을 위한 서비스를 제공하지 못한다[14].
이와 같이 스마트홈에 관련된 연구가 많이 진행되고 있다. 스마트홈 연구에 대한 경향을 살펴본 결과 하드웨어와 소프트웨어를 하나의 객체와 같은 에이전 트화 시키는 경향을 볼 수 있고, 통신과 컨텍스트 데이터 표현에서의 표준화되 는 경향을 볼 수 있다. 그리고 사용자 중심의 서비스 구현에 대한 연구가 많이 이루어지고 있다.
하지만 아직까지 한 공간에서 다중 사용자를 위해 서비스를 제공하는 스마트 홈 시스템에 관한 연구가 없으며, 위치를 세부적으로 적용한 연구도 없다. 서비 스 측면에서도 사용자에게 실질적으로 필요하기 보다는 구축된 인프라스트럭처 를 활용할 수 있는 서비스를 구현하였다. 그리고 서비스를 구현하기 위해 특정 기기에 맞는 어플리케이션을 제작하여 사용하였다.
Ⅲ. 스마트홈 구성 요소 기술
3.1 위치 인식
위치 인식은 스마트홈의 컨텍스트를 이용한 서비스 구현에서 가장 중요한 컨 텍스트 중 하나이다. 스마트홈의 지능을 최대화시키는 가장 필수적인 서비스 중 의 하나가 집안 내부에서 사용자의 정확한 위치 추적이다. 왜냐하면 그런 시스 템을 통해서 스마트홈은 사용자의 명령에 반응하여 서비스를 제공하는 것이 아 닌 지능을 가지고 능동적으로 결정하여 사용자에게 서비스를 제공할 수 있기 때문이다[15].
하지만 집안에서의 사람의 위치를 정확히 파악하는 것은 쉬운 일이 아니며 사용자의 개인 사생활 침해 우려도 있기 때문에 민감한 문제이다. 이것을 해결 하기 위해서는 다각적인 기술의 접근이 필요하다.
지금까지 연구된 위치인식에 관한 기술들을 알아보겠다. 무선 통신을 이용한 거리 측정은 주로 도착시간 또는 도착 시간의 차이를 이용하여 거리를 측정하 게 된다. 그리고 카메라, 압력 센서, PIR 센서 등을 이용한 위치 인식 방법들이 있다.
3.1.1 무선 주파수 신호(Radio Frequency)
위치 인식 시스템에서 저주파 센서는 418MHz, 433MHz, 900MHz의 주파수를 사용한다. 이 기술의 장점은 센서의 값이 저렴하고 사용하기 편리하다. 하지만 정확도 측면에서 도착 시간의 차이를 이용할 경우 1m에 정확도를 나타내고 신 호에 세기를 이용할 경우 3m의 정확도를 나타낸다[15]. 이 수준의 정확도는 스 마트홈에서 사용하기에 적합하지 않다.
3.1.2 적외선 신호
적외선 추적 시스템은 적외선 파장을 방출하는 장치를 이용하게 되고, 도착시 간을 계산하여 위치를 파악하게 된다. 하지만 이 장치는 빛의 간섭을 받아 정확 도에 심한 영향을 준다[15].
3.1.3 위성 위치 인식 시스템(GPS)
위성 위치 확인 시스템은 원래 군사용 차량, 함정, 항공기 등의 위치 측정을 위하여 구축되었다. 하지만 현재는 민간에서도 사용할 수 있도록 공개되어있다.
따라서 자동차에 탑재하는 항법 장치, 선박이나 헬리콥터 등의 항법 장치 등에 사용된다.
이 시스템은 4개의 위성으로부터 전달되는 송신 주파수(1,575.42MHz, 1,227.6MHz)를 수신하여 위치를 계산할 수 있다. 하지만 세계적으로 가장 좋은 위치 확인 시스템(GPS: Global Positioning System)의 정확도는 10m이다[15].
3.1.4 초음파 신호
40Khz에서 130Khz까지의 주파수를 사용하는 초음파 센서로 도착 시간을 이용 하여 거리 정보를 알아낼 수 있다. 이 거리 정보는 삼각법을 이용하여 계산되 고, 정확도는 약 3cm이다[15].
3.1.5 압력 센서를 이용한 위치 인식
집안의 모든 바닥에 압력 센서를 설치하여 위치를 파악하게 된다. 사람의 위 치뿐만 아니라 가구 및 다른 물체들의 위치도 파악할 수 있다. 하지만 전체적인 설치의 불편함과 비용이 문제가 된다. 광주과학기술원의 ubiHome[14]과 일본의
Ubiquitous Home[13]에서 사용되었다.
3.1.6 카메라를 이용한 위치 인식
카메라를 이용하여 위치를 확인하는 방법은 계속해서 카메라로 영상을 촬영 하고 이전 영상과 현재 영상을 영상 처리 기법을 이용하여 변화된 영상을 파악 함으로써 물체의 움직임을 감지할 수 있다[16]. 영상 데이터 처리를 위한 컴퓨 터 성능과 영상 데이터 전송을 위한 빠른 통신 속도가 구현의 문제점이 될 수 있다. 그리고 사생활 침해의 우려가 있다.
3.1.7 PIR(Pyroelectric infrared)센서를 이용한 위치 인식
여러 개의 PIR센서를 사용하여 사용자의 움직임을 감지한다[17]. PIR센서가 움직임을 감지하면 그 센서가 측정 할 수 있는 범위 내에 움직이는 물체가 있 다는 것을 의미한다. 하지만 정확한 위치를 파악하기 어려우므로 여러 개의 센 서를 사용하여 교차되는 부분의 위치를 파악한다. PIR센서의 저렴한 가격으로 인한 장점이 있다. 하지만 사람의 움직임을 대략적으로 감지함으로 인해 정확한 위치 추적이 어렵다. 보정 알고리즘을 적용하더라도 동선을 개선할 수 있지만 사용자 위치의 정확도를 획득하기는 어렵다. 그리고 여러 개의 센서를 사용하면 정확도는 높아지지만 여러 개의 센서를 사용함으로써 네트워크 구성이 복잡해 진다.
3.1.8 모션센서를 이용한 위치 인식
모션센서는 방향을 감지하는 지자기센서와 움직임을 감지하는 가속도 센서나 자이로 센서로 이루어져 있다. 먼저 방향을 감지하는 지자기센서는 지구의 자기 장을 감지하여 나침반과 같이 동서남북을 정보를 알 수 있고, 가속도 센서는 보
통 압전재료(전기신호에 따라 수축, 팽창하는 것)에 가속을 발생시키면 힘이 걸 려서 전하가 발생하는 원리를 가지고, 회전각 가속도 센서인 자이로 센서는 회 전하는 각의 수직방향으로 코리올리스 힘(지구 자전의 각속도와 그에 따른 원심 력으로 인하여 회전하고 있는 물체 위에서 운동하는 물체에 작용되는 가상적인 힘으로서 운동하는 물체의 속력에 비례하고 운동 방향에 수직으로 작용하는 힘) 이 발생하게 되면 이 수직 힘을 가속도 센서와 마찬가지 원리로 감지하는 원리 를 가집니다.
3.2 UPnP(Universal Plag and Play)
집안 내에서 가전기기들을 네트워크로 연결시키기 위해 여러 가지 통신 방식 들이 사용되는데 현재 이더넷, 블루투스, 무선 랜, IEEE 1394, PLC, UWB 등 그 전송 데이터 및 환경 특성에 맞는 통신 방식이 다각적으로 사용되고 있다. 그리 고 연결된 가전기기들의 원활한 네트워크 관리를 위해서 미들웨어가 필요하게 되는데 현재 UPnP[18][19], Jini[20], HAVi[21] 등이 사용되고 있다. 이중에 UPnP 는 컴퓨터에 연결된 하드웨어를 자동으로 인식하는 기술인 PnP(Plug and Play)기 능을 네트워크로 연장하여 통신이 가능한 장치가 네트워크에 연결되었을 때 이 장치를 인식하고 관리하며 사용자가 이 장치를 제어할 수 있는 인터페이스를 자동으로 제공해주는 역할을 한다.
인텔사에서는 UPnP 명세서에 맞게 "Intel UPnP SDK for Linux"[22]를 개발하 여 제공함으로써 개발자들이 쉽게 UPnP를 사용하여 네트워크를 구축할 수 있는 기반을 제공한다[23].
3.2.1 UPnP 구성요소
3.2.1.1 UPnP 디바이스
UPnP 디바이스는 이 장치가 제공해 줄 수 있는 서비스 목록을 서비스 명세서
로 가지고 있다. 따라서 UPnP 네트워크에 연결되었을 때 자신의 서비스 명세서 를 각 UPnP 컨트롤 포인트에 전달하여 디바이스 아이디와 속성, 서비스 항목 등을 알 수 있게 한다.
3.2.1.2 UPnP 컨트롤 포인트
UPnP 컨트롤 포인트는 UPnP 네트워크에 연결된 UPnP 디바이스들을 검색하 여 그것들을 제어하는 기능을 가진 컨트롤러이다. UPnP 컨트롤 포인트가 UPnP 디바이스들을 찾아낸 이후에는 디바이스 명세서를 획득하여 관련된 서비스 항 목을 얻고, 그것을 바탕으로 UPnP 디바이스를 제어할 수 있다. 그리고 UPnP 디 바이스를 이벤트 서버에 등록하여 UPnP 디바이스의 상태가 변경될 때 마다 생 성되는 이벤트를 받아 볼 수도 있다.
3.2.2 UPnP 동작 단계
3.2.2.1 발견(Discovery) 단계
이 첫 번째 단계에서는 UPnP 컨트롤 포인트가 네트워크에 접속해있는 UPnP 디바이스와 그것이 제공하는 서비스를 탐색한다. UPnP 디바이스는 그것이 제공 하는 서비스 항목들을 멀티캐스트 방법으로 통보한다.
3.2.2.2 기술(Description) 단계
UPnP 컨트롤 포인트가 관련된 UPnP 디바이스와 서비스 항목들을 찾으면 그 것의 완전한 디바이스 명세서를 요구한다. 이 디바이스 명세서는 디바이스 아이 디 제어 항목, 이벤팅 항목 등을 XML(Extensible Markup Language)형식으로 제 공한다.
3.2.2.3 제어(Control) 단계
이 단계에서는 UPnP 컨트롤 포인트를 통해 UPnP 디바이스의 상태에 변화시
켜서 UPnP 디바이스가 제공하는 서비스를 제어하는 단계이다.
3.2.2.4 이벤팅(Eventing) 단계
UPnP 컨트롤 포인트가 흥미 있는 서비스 상태에 대해 동기화하는 과정이다.
UPnP 컨트롤 포인트는 특정 서비스 항목에 대한 이벤트 서버에 등록을 하면 서 비스의 상태가 변화되었을 때 이벤트 통보를 받는다.
3.2.2.5 프리젠테이션(Presentation) 단계
UPnP 디바이스가 표준 HTML(Hypertext Markup Language)형식으로 작성된 문 서를 제공하여 UPnP 디바이스를 제어하고 상태를 확인할 수 있는 사용자 인터 페이스를 제공한다.
3.3 상황인식 학습 시스템
그림 3.1 학습시스템 네트워크 구조
상황인식을 이용한 가전기기 제어를 위해서는 학습이 가능한 시스템을 고려 하여야 한다. 가정 내에는 인간의 편리한 생활을 위해 여러 가지 가전제품이 있 으며 이제는 사용 편의성을 넘어 사용자가 제어하기 전에 사용자의 의도를 파
악하여 자동으로 제어해주는 시스템이 필요한 것이다. 그림 3.1은 상황인식 학 습 시스템을 위한 집안 내부의 구성도이다.
3.3.1 시스템 구성도
사용자 컨텍스트를 기반으로 집안 내에 존재하는 컨텍스트를 학습하는 시스 템을 구현하고자 한다. 우선 각종 전자 제품과 그것의 제어신호, 사용시간, 사용 자와 그 사용자의 위치가 주 컨텍스트 데이터베이스로 저장이 된다. 시스템이 사용자에게 서비스를 제공할 경우, 사용자의 위치를 기반으로 하여 저장된 사용 자의 데이터베이스를 이용한 추론을 통하여 사용자가 가장 선호하는 서비스를 실행하는데 그 목적을 두고 있다.
이런 목적을 두고 학습 시스템을 만들기 위해 크게 3가지 하드웨어 모듈을 이용하여 네트워크를 구성하였고 학습 프로그램을 구성하기 위해 크게 4가지의 소프트웨어 에이전트로 구성을 하였다.
3.3.2 하드웨어 구성 모듈
3.3.2.1 컨텍스트 획득 및 제어 모듈
이 모듈은 사람과 집안의 정보와 관련된 컨텍스트를 획득하거나 컨텍스트를 전송하여 집안의 가전기기를 제어한다. 주로 센서가 이 모듈에 포함되며 사용자 의 위치, 가전기기의 제어신호와 관련된 컨텍스트를 획득하는데 사용된다.
3.3.2.2 컨텍스트 데이터 통신 모듈
컨텍스트 획득 모듈에서 획득한 컨텍스트 신호를 네트워크상에서 서로 통신 할 수 있는 컨텍스트 데이터 신호로 변환시키고 통신이 가능하게 해주는 모듈 이다. IR신호를 받아들이고 IR신호로 제어되는 장치를 제어하기 위한 IR송수신 기 모듈, 각종 센서에서 획득한 신호를 UART(Universal Asynchronous
Receiver/Transmitter)신호로 변환하여 UART통신을 가능하게 하는 모듈, UART 신호를 TCP/IP(Transmission Control Protocol/Internet Protocol) 또는 UPnP신호로 변환시켜서 TCP/IP 통신과 UPnP 통신을 가능하게 하는 모듈이 여기에 해당된 다.
3.3.2.3 컨텍스트 데이터베이스 관리 모듈
컨텍스트 데이터 통신 모듈을 통해 수신한 컨텍스트 데이터를 저장하고 사용 자의 선호도를 추론하는데 사용되는 모듈이 여기에 해당된다.
3.3.3 소프트웨어 에이전트
3.3.3.1 컨텍스트 통신 에이전트
각종 센서와 여러 가지 디바이스 상호간에 통신이 가능하게 해주는 에이전트 이다. 주로 UART통신, TCP/IP 통신, UPnP 통신 등이 여기에 해당된다.
3.3.3.2 컨텍스트 데이터베이스 에이전트
각종 컨텍스트 데이터들을 데이터베이스로 저장해주는 에이전트이다. 표준화 와 온톨로지 활용을 위해 주로 XML을 이용하게 된다.
3.3.3.3 사용자 선호도 추론 에이전트
컨텍스트 데이터베이스 에이전트에 저장된 사용자의 컨텍스트를 분석하여 사 용자의 선호도를 추론하는 에이전트이다.
3.3.3.4 서비스 에이전트
추론된 데이터를 이용하여 사용자가 원하는 서비스를 제공해주는 에이전트이 다.
3.3.4 학습 및 서비스 실행흐름도
그림 3.2 컨텍스트 학습 시스템 알고리즘
그림 3.2는 서버에서 컨텍스트 신호를 획득하였을 때 컨텍스트 데이터 처리 알고리즘을 나타낸 것이다. 우선 수신된 컨텍스트 데이터를 확인하여 컨텍스트 신호가 가전기기를 제어한 신호인지 사용자의 위치를 파악한 신호인지를 파악 한다. 제어신호이면 그때의 컨텍스트 즉, 사용자, 사용자의 위치, 시간, 제어한 장치의 상태 등을 컨텍스트 데이터베이스에 저장한다.
수신된 신호가 위치 신호일 경우에는 사용자의 컨텍스트 데이터베이스를 추 론 사용자가 가장 선호하는 서비스를 실행해준다.
3.4 RFID 시스템
3.4.1 RFID 시스템 구조
RFID 시스템은 태그, 리더, 서버(미들웨어 및 응용서비스 플랫폼)로 구성되고, 유무선 통신망과 연동되어 사용한다. 태그는 객체를 구별할 수 있는 데이터를 가지고 객체 상에 위치하고 있으며, 에너지 자원의 보유 여부에 따라 수동형 태 그와 능동형 태그로 구분한다. 수동형 태그의 경우 리더로부터 에너지를 공급받 으며 통신 범위는 1m 이내이다. 능동형 태그의 경우는 에너지 자원을 가지고 있어 수십 ~ 수백 m의 통신 범위를 갖는다. RFID 리더는 태그가 가진 데이터를 읽어 들여 객체를 인식하고, ONS(Object Naming Service) 서버와 PML(Product Markup Language) 서버를 통해 객체에 대한 정보를 획득한다[24]. 그림 3.3은 RFID 시스템의 구조를 보여주고 있다.
2. Request IP Addrress 3. Replay IP Address
4. RFID code 5. PML-Data
ONS Server
PML Server RFID Reader
1. RFID Code
RFID Tag
그림 3.3 RFID 시스템 구성도
3.4.2. RFID 시스템에 기반을 둔 무선 센서네트워크의 구성
리더와 단일 홉에서만 인식이 가능한 RFID 태그는 리더와 멀리 떨어져 있을
경우 태그를 읽어 들이지 못하여 객체를 인식할 수 없는 문제를 유발한다.
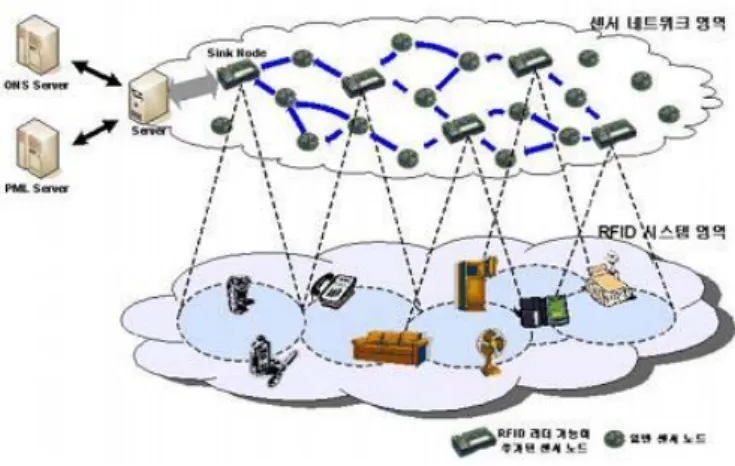
RFID 태그의 인식범위는 수동형 태그인 경우는 1m 이내이고, 능동형 태그의 경 우는 수십~수백 m 이기 때문에[24][25] 대상 지역이 이 범위보다 넓을 경우 고 정된 위치에서 전체 객체에 대한 정보를 얻을 수 없다. 이러한 문제는 무선 센 서 네트워크의 멀티 홉 통신을 이용해 해결할 수 있다. 센서 네트워크를 구성하 는 노드에 RFID 태그를 읽는 기능을 부과하여, RFID 태그를 읽어 들이고, 이를 멀티 홉 통신을 이용하여 목적지에 전달할 수 있다. 이는 무선 센서 네트워크가 원거리에 있는 RFID 태그 정보를 원하는 시스템이나 사용자에게 거리에 대한 투명성을 제공하는 것이다[26].
이러한 RFID 시스템을 지원하는 센서 네트워크는 상황 인지를 위한 범위 제 약이 없는 RFID 인식 기능을 제공할 뿐만이 아니라, 센서 네트워크 고유 기능 과의 융합으로 발전된 상황 인지 시스템을 제공한다. 센서 네트워크가 수집하는 온도, 습도 등의 환경 정보를 RFID 시스템의 객체 인식 기술과 함께 고려하면 새로운 상황 인지를 가능하게 한다. 예를 들면, 같은 온도와 습도를 가지는 환 경도 존재하는 객체가 식료품일 경우와 아닐 경우에 따라 다른 의미를 가질 것 이며, 같은 식료품일 경우에도 부패가 빠른 것과 아닌 것에 따라 그 의미가 달 라질 것이다.
이와 같이 RFID 지원 센서 네트워크는 RFID 시스템과 센서 네트워크가 상호 보완적으로 통합되는 것이고, 이것의 실현은 센서 노드와 RFID 리더의 하드웨 어적 결합으로 가능해진다. RFID 리더는 대상 지역에 존재하는 객체의 태그를 읽어 들이고, 이를 노드에 전달하고, 센서 노드는 센서로부터 들어온 데이터와 함께 태그 정보를 무선 통신을 통해 베이스 노드로 전달함으로써 센서 온도, 습 도, 조도와 같은 환경 정보와 함께 객체 정보를 획득할 수 있게 한다. 그림 3.4 는 RFID 시스템 지원 무선 센서네트워크의 구조도를 보여주고 있다.
그림 3.4 RFID 시스템 지원 무선 센서네트워크 구성도
Ⅳ. 무빙월(Moving Wall)
4.1 정의
근래 들어 기술의 발달과 함께 주거 생활의 발달이 함께 이루어져 왔다. 이러 한 주거 생활의 발전은 지능형 주거 환경으로 많은 변화를 꾀하고 있고, 그러한 변화는 분양원가를 높이는 결과를 초래하게 되었다.
많은 대형건설사들이 나타내고 있는 미래형 주택 전시관을 가보면 실용성을 살린 주택 보다는 첨단가구, 가전 전시장 같다는 느낌이 든다. 이렇게 비싼 마 감재나 제품을 적용하기 보다는 공간 활용도를 높여 입주자들이 보다 편하게 살 수 있는 아파트를 만들기 위해서 나타난 방식이다.
이러한 유비쿼터스 기술을 채택한 주택이 널리 보급 되면서 같이 발달을 하 는 지능형 기술들을 건설사에서는 어느 기술 하나라도 배제 할 수가 없다. 그래 서 우리는 같은 평형이라도 조금 더 저렴하고 분양 원가를 절감할 수 있는 주 택을 건설할 수 없을까 하고 개발된 것이 공간의 활용도를 높이는 방법이다. 이 는 보다 낮은 평형을 보다 넓은 느낌을 갖고 살 수 있도록 하는 소비자를 위한 하나의 주택의 변화이다. 그리고 아파트는 이웃집과 집 내부 구조가 똑같기 때 문에 거주민의 개성을 발휘할 여지가 없다. 그러나 신개념 아파트는 이 같은 통 념을 편견으로 바꾸고 있다. 컨버터블 하우징(Convertible Housing)은 간단한 조 작만으로도 아파트 내부 구조를 입주민의 입맛에 맞게 바꿀 수 있는 것과 같은 시스템이 개발이 되었다. 이는 움직이는 벽인 무빙월과 투명도가 조절되는 글라 스 및 스마트 조명과 혁신적인 가구 등이 복합 적용됐기 때문에 가능해졌다.
이 중 무빙월은 현재 많은 건설사들이 최신형 아파트에 적용하여 진행 중인 건설방법이고, 현재 주택 외에 회사나 학교 등 많은 곳에서 활용이 되고 있는 실정이다. 그림 4.1은 현재 무빙월이 사용되고 있는 학교와 연회장의 예를 나타 낸다.
그림 4.1 학교, 연회장에서 활용되고 있는 무빙월
그림 4.1과 같이 무빙월은 공간을 나누거나 합하여 사용할 수 있게끔 용도에 맞게 쉽고 편리하게 활용할 수 있다. 국내의 한 기업에서는 입주 후 최소 비용 으로 자신의 취향에 맞는 아파트로 꾸밀 수 있는 상품을 내놓을 것을 목표로 하고 있다. 이는 미래주택에서 침실은 잠만 자는 공간이 아니라 언제든지 원하 는 공간으로 활용될 수도 있다는 점을 암시하고 있다. 예를 들어 무빙월을 통해 거실을 독립된 공간으로 분리 활용할 수 있으며, 실내공간과 테라스 사이 벽을 제거해 실내에서도 옥외의 상쾌한 기운과 야경을 즐길 수 있다. 그리고 벽체 수 납식 슬라이딩 가구 등을 적용해 공간을 더욱 여유 있고 깨끗하게 활용할 수 있다.
4.2 용도
단순한 무빙월 만을 사용 하는 것은 건축적인 측면에서 적용되는 것이고 우 리는 이러한 무빙월을 상황인식 기술과 결합한 지능적인 주택 시스템 개발을 본 논문에서는 연구하였다. 그림 4.2는 댁내에 설치 된 온도, 습도, CO2 센서를 통해 수집된 정보와 사람의 이동에 따른 쾌적한 공간을 확보하기 위한 무빙월 의 이동을 나타내고 있다.
온도/습도/Co2 센서
지능형 정보 검색 서버/
Context Aware 서버
RG Internet
Zigbee
Zigbee
Zigbee
사람
센서를 통한 위치 인식
그림 4.2. 지능형 공간 시스템
다음은 위에서 제시한 두 가지 기술을 결합하여 실생활에서 유용하게 사용할 수 있는 응용 예를 나열 하였다.
① 방범
충격센서 및 모니터링 시스템을 통해 수집된 정보를 침입 시 인체 및 단말기 에 부착된 RFID 태그를 인식 못 할 경우 가족 구성원에게 무선인터넷 단말기를 통한 음성(경고음), 화상전달, SMS 전송, 및 중요시설에 대한 무빙월 이동.
② 방재
외출 및 취침 때 화재 발생 시 댁내에 설치된 화재 감지 센서가 정보를 수집 하여 자동 경보 기능 또는 무빙월 이동 및 가족구성원에게 무선인터넷 단말기 를 통해 SMS 문자 전송 기능.
③ 지능형
댁내에 설치된 온도, 습도, CO2 센서를 통해 수집된 정보와 사람의 이동에 따른 쾌적한 공간을 확보하기 위해 RFID 인식을 통한 무빙월의 이동.
④ 환경
무빙월은 주방과 거실 사이에 설치가 되어서 손님을 초대해 음식을 준비할 때나 기타 주방에서 음식을 준비할 때 발생하는 소리와 냄새 등을 차단.
4.3 무빙월의 지능 등급
근래 많은 스마트 기기들이 등장 하면서 우리는 이러한 스마트 기기들의 등 급을 결정하기 위해 각각의 기기에 지능 등급을 부여하고 있다. 이는 지능형 홈 서비스와 기기에 대해서 편리성과 유용성을 객관적으로 손쉽게 판단할 수 있다.
그리고 지능형 홈 기기 개발/제조업체는 지능형 홈 기기의 개발 목표와 수준을 구체적으로 결정하여 기술개발, 제품개발, 제조의 투자 예측가능성을 높일 수 있다. 지능형 홈 응용시스템(서비스) 개발업체는 서비스 기획과 개발에 있어서 서비스 구성에 참여하는 기기의 지능성 기준을 설정하여 비즈니스모델의 구체 성과 성공가능성을 높여 지능형 홈 산업화 촉진의 계기를 마련하기 위해 이러 한 지능 등급을 부여한다.
지능형 홈기기의 지능성 평가방법에 있어 지능의 높고 낮음과 같은 언어적 변수를 애매성(Fuzziness)으로 간주하고 이를 수치화하기 위하여 측정도구로 퍼 지적분을 사용한다.
4.3.1 퍼지이론 고찰
퍼지이론은 1965년 L. A. Zadeh 교수가 제안한 퍼지집합(Fuzzy Set)을 시초로 하여 그 후 퍼지이론(fuzzy theory)과 퍼지측도(fuzzy measure)이론 등으로 발전되 어 왔으며, L. A. Zadeh 교수가 제시한 퍼지이론은 애매하게 표현된 현상의 불 확실한 상태의 자료에 대해서 보다 명확한 분석결과를 얻을 수 있도록 하기 위 한 것이다. 또한 평가에 있어서 주관적인 척도는 가법성(additivity)을 만족하지 못하는 경우가 많다. 이러한 경우의 척도를 구성하기 위하여 퍼지측도(fuzzy
measure)가 제안되어 있고[27] 비가법(non-additivity)적인 평가방법으로 퍼지적분 (fuzzy integral)이 제안되어 있다. 여기서 퍼지적분에 의한 평가방법이라는 것은 가법성을 가지지 않는 평가기준의 중요도를 가법성을 만족하지 않는 주관적인 척도를 취급하는 퍼지측도로 하고, 퍼지적분에 의하여 종합평가하는 방법이다.
여기서 주목할 점은 퍼지측도는 가법적인 경우를 특별한 경우로 포함하고 있다 는 것이다. 이러한 이유로 퍼지적분은 그 실용적인 가치가 인식되어 왔다.
4.3.1.1 퍼지측도(Fuzzy Measure)
Sugeno(1974)에 의해 처음 소개된 퍼지측도는 가법성을 만족하지 않고, 단조 성만을 고려한 일종의 집합치 함수이다. 그리고 확률측도의 확장개념으로서 특 히 가법성을 만족하지 않는 비가법적인 평가문제에 있어 대단히 효과적인 측도 로 알려져 있다[28]. 퍼지측도는 어떤 집합 X에서, 그 부분집합을 T로 하는 경 우, T에서 [0, 1]에의 집합 함수 g가 다음의 3가지 성질을 가진 경우 g를 퍼지측 도로 정의 한다.
→
① ∅
②
③ ∈ ⊂ → ≤ (4.3.1)
즉, 퍼지측도 g(A)는 X의 임의의 부분집합 A에 대한 주관적인 평가값이라 할 수 있다. 그러나 퍼지측도에서는 가법성이 성립하지 않으므로 각 원소의 측도를 알아도 부분집합 A의 측도를 알 수 없다. 따라서 각 원소의 척도로부터 집합 A 의 척도를 일정한 법칙으로 정하는 것이 가능한 , 퍼지측도(확률척도)가 고안 되었으며, 그 정의는 다음과 같다[27].
∪
단 ∈ ∩ ≺ ≺ ∞ (4.3.2)
4.3.1.2 퍼지적분(Fuzzy Integral)
퍼지적분은 주관적인 판단이 개입되는 평가문제에서 유용하게 이용되므로, 의 사결정(decision making) 문제, 비선형 분류(nonlinear classification) 문제들과 같은 데이터 마이닝(data mining)이나 정보 융합(information fusion)분야[29]뿐 아니라 어떤 대상을 평가하는 방법으로 다양한 분야에서 이용되어왔다[30].
퍼지측도로 평가한 것은 적분을 통해서 전체구간 혹은 일부구간의 총합치를 구해야 한다. 그런데 퍼지측도를 이용한 경우에는 비가법성이 존재하므로 일반 Lebesque적분을 사용하여 그 합을 구할 수 없다. 이를 위해서 많은 방법들이 이 미 제안되어 있지만, 본 논문에서는 Sugeno 퍼지적분과 Choquet 퍼지적분에 대 하여 알아보고자 한다.
MIQ(Machine Intelligence Quotient) 측정방법에 있어서 Bien te al.은 Sugeno 퍼 지적분과 Choquet 퍼지적분을 제안하였다[31]. 이에 따르면 Sugeno의 퍼지 적분 은 어떤 대상을 여러 항목(또는 관점)에 대해서 평가()하고 각 항목의 중요 도( )에 차이가 있을 때 이들 평가치를 종합하는데 이용될 수 있다. 따라서 신뢰성이 요구되는 주관적(subjective) 평가에 바람직하며, Choquet 퍼지적분은 확 률척도에 가까운 해석이 가능하며, 일반적으로 종합적인 수행결정을 필요로 하 는 객관적(objective) 평가에 적용될 수 있다고 하였다. 1994년 Ralescu에 의하며 Choquet 퍼지적분은 불확실성이나 애매성을 다룰 수 있다고 하였다.
• Sugeno Fuzzy Integral(가법형)
∘ · (4.3.3)
• Choquet Fuzzy Integral(이산형)
≥ ≥ ··· ≥
·
(4.3.4)
4.3.2 구성요소 정의
앞서 살펴본 관련 연구를 통하여 지능형 홈기기의 지능성 측정을 위한 지능 성의 구성요소를 도출하고, 각각의 요소에 대하여 본 연구에 맞게 재정의 하고 자 한다.
이렇게 도출된 지능성 구성요소를 토대로 측정모델을 설계하고 모델의 측정 에 있어서 지능의 높고 낮음의 애매성에 대하여 퍼지니스(Fuzziness)를 이용하여 정량화를 위한 Sugeno 퍼지적분과 Choquet 퍼지적분을 이용한다. 마지막으로 설 계된 지능 등급 부여모델에 대하여 무빙월을 대상으로 측정과정의 예를 들어 설명하기로 한다.
4.3.2.1 지능성 구성요소 도출 및 정의
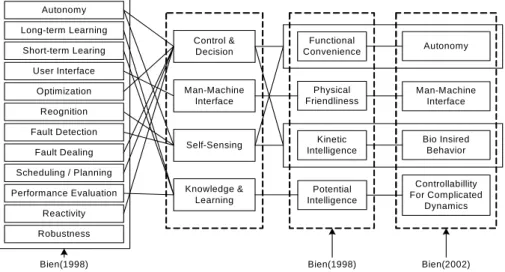
앞서 살펴본 바와 같이 J. N. Bien이 제시한 지능성 구성요소를 토대로 하여 Control & Decision, Man-Machine Interface, Self-Sensing, Knowledge & Learning 등 4개의 지능성 구성요소를 도출하였으며, 그 결과는 다음 그림 4.3과 같다.
Autonomy Long-term Learning Short-term Learing
User Interface Optimization
Reognition Fault Detection
Fault Dealing Scheduling / Planning Performance Evaluation
Reactivity Robustness
Control &
Decision
Man-Machine Interface
Self-Sensing
Knowledge &
Learning
Functional Convenience
Physical Friendliness
Kinetic Intelligence
Potential Intelligence
Autonomy
Man-Machine Interface
Bio Insired Behavior
Controllabillity For Complicated
Dynamics
Bien(1998) Bien(1998) Bien(2002)
그림 4.3 도출된 지능성 구성요소
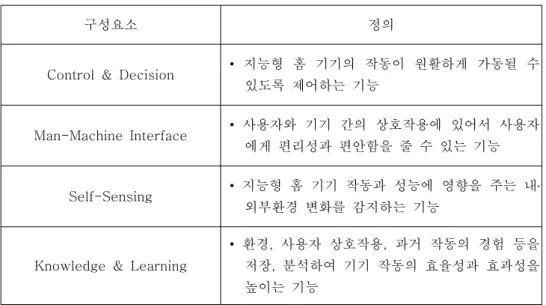
도출된 4개의 지능성 구성요소를 표 4.1과 같이 정의하였다.
표 4.1 지능성의 구성요소 및 정의
구성요소 정의
Control & Decision • 지능형 홈 기기의 작동이 원활하게 가동될 수 있도록 제어하는 기능
Man-Machine Interface • 사용자와 기기 간의 상호작용에 있어서 사용자 에게 편리성과 편안함을 줄 수 있는 기능
Self-Sensing • 지능형 홈 기기 작동과 성능에 영향을 주는 내․
외부환경 변화를 감지하는 기능
Knowledge & Learning
• 환경, 사용자 상호작용, 과거 작동의 경험 등을 저장, 분석하여 기기 작동의 효율성과 효과성을 높이는 기능
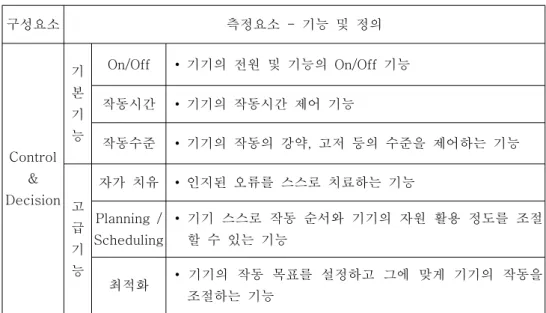
이렇게 정의된 구성요소 각각에 대하여 기본기능과 고급기능으로 분할하며, 세부 측정요소에 대하여 표 4.2 ~ 표 4.5와 같이 재정의 하였다. 표 4.5에 보는 바와 같이 Knowledge & Learning은 구성요소 자체가 고급기능으로 판단되어 기 본기능은 배제하였다.
표 4.2 Control & Decision
구성요소 측정요소 - 기능 및 정의
Control
&
Decision 기 본 기 능
On/Off • 기기의 전원 및 기능의 On/Off 기능
작동시간 • 기기의 작동시간 제어 기능
작동수준 • 기기의 작동의 강약, 고저 등의 수준을 제어하는 기능
고 급 기 능
자가 치유 • 인지된 오류를 스스로 치료하는 기능 Planning /
Scheduling
• 기기 스스로 작동 순서와 기기의 자원 활용 정도를 조절 할 수 있는 기능
최적화 • 기기의 작동 목표를 설정하고 그에 맞게 기기의 작동을 조절하는 기능
표 4.3 Man-Machine Interface
구성요소 측정요소 - 기능 및 정의
Man- Machine Interface
입 력
Manual Input • 사용자가 수동으로 기기제어를 할 수 있는 Interface 구현기능
터치스크린 • 터치스크린을 통한 기기작동 음성인식/음성합성 • 사용자의 음성을 인식하는 기능
출 력
Text Display • 기기의 작동 및 상태를 문자로 보여주는 기능 멀티미디어
디스플레이
• 멀티미디어(사진, 음악, 동영상 등)를 사용자에게 디스플레이 하는 기능
Visualization • 3D로 사용자에게 보여 주는 기능 음성합성 • 사용자에게 음성으로 알려주는 기능
표 4.4 Self-Sensing
구성요소 측정요소 - 기능 및 정의
Self- Sensing
기 본 기 능
전 력 • 기기 작동시 이용되는 전력을 인식하는 기능 시 간 • 기기의 작동 시간을 인식하는 기능
온 도 • 기기의 내/외부의 온도를 감지하는 기능 양 • 사용자 및 물체의 양을 인식하는 기능
고 급 기 능
Fault Detection • 기능적 결함을 스스로 감지하는가 여부 위 치 • 사용자 및 물체의 위치를 인식하는 기능 움 직 임 • 사용자 및 물체의 움직임을 인식하는 기능
ID 식별 • 사람, 물체에 대한 구별능력이 있는가 여부
표 4.5 Knowledge & Learning
구성요소 측정요소 - 기능 및 정의
Knowledge
& Learning
Pattern 저장
• 작동에 이용된 모든 패턴의 자료를 정보화하는 기 능
• Error의 발생과 처리에 관련된 이력의 저장
패턴분석 및 학습 • 축적된 패턴 정보를 분석하여 지식을 생성․축적하는 기능
추론 및 제안 • 패턴분석 결과와 지식을 활용하여 기기 점검 제안 이나 자율작동을 가능하게 하는 기능
4.3.2.2 지능 등급 부여 모델
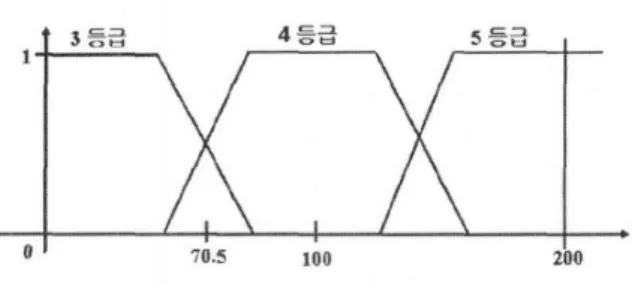
표 4.6은 평가대상 기기의 지능성 등급을 나타내었다. 전체적으로 0등급부터 5등급까지의 등급이 부여되며, 0, 1, 2, 3등급은 구성요소의 기본기능을 만족하
는 가의 여부에 의해서 결정되고, 3, 4, 5등급은 주로 고급기능 측정요소의 측정 값을 퍼지적분 결과값에 의해서 등급이 부여된다.
표 4.6 지능 등급 부여 모델
구분 구성요소 측정요소
Step 1 Accessibility • 지능형 홈 네트워크와 연결성 여부 Step 2 기본측정요소
선택 • 대상기기 평가에 적합한 기본측정요소 선택 Step 3 Basic Comtrol
& Interface
• 기기의 작동을 제어할 수 있는 기본적 기능과 작동제 어를 위한 기본적 인터페이스의 여부
Step 4 Basic Sensing • 지능형 홈 기기의 작동과 성능에 영향을 주는 내부, 외부환경 변화의 기본적 감지 기능
Step 5 고급측정요소의 선택
• 4개의 지능성 구성요소에서 대상기기 평가에 적합한 고급측정요소 선택
Step 6 측정요소의 평가
• 선택한 측정요소에 대해서 평가하되, 각 평가치는 정 규화하여 같은 종류에 속하는 기기의 평균값이 0.5정 도 되도록 한다.
• Direct Method 객관적으로 정량적 측정이 가능한 요 소의 평가
• Indirect Method 전문가의 설문에 의한 평가 Step 7 요소평가결과의
통합
• Fuzzy Intergral 방법에 의하여 각 요소 평가치를 통 합한 하나의 수치를 계산한다.
Step 8 등급의 부여 • 계산된 수치로 지능성 등급(3~5)의 부여
4.3.3 무빙월 지능 등급
무빙월을 이용한 지능 등급 부여 모델의 측정 예를 제시하고자 한다. 무빙월 의 기능은 아직 실현화 되지 않았지만, 미래 지능형 무빙월의 기능으로 예상되 는 기능을 포함하고 있으며, 이에 맞추어 측정항목을 구성하였다. 표 4.7은 앞서 제시한 표 4.6의 Step 1 ~ Step 4까지의 전개 과정이다. 3가지 구성요소의 기능 중에서 무빙월에 해당하는 기능들이 측정요소이며 현재 측정대상인 가상의 무
빙월이 기본기능을 모두 만족하였다고 가정하였다. 만약 Step 3 ~ Step 4에서 측 정요소 중 한 가지라도 만족되지 못한다면 다음 단계로 넘어갈 수 없으며 만족 되지 못한 단계에 따라 지능은 1등급 혹은 2등급으로 판정한다.
표 4.7 무빙월 측정 예
구분 구성요소 측정요소 Y/N
Step 1 Accessibility 홈 네트워크와의 연결성이 있는가? Y
Step 3
Control과 Interface의
기본기능
기본적으로 작동제어의 기본기능과 인터페이스 가 있는가?
Control의 기본기능
On/off Y
작동시간 Y
작동수준 Y
Man-machine interface의
기본기능
Text Display Y Manual
Input Y
Step 4 Self-Sensing 의 기본기능
지능형 홈기기의 작동 과 성능에 영향을 주는 내부, 외부환경 변화의 기본적 감지 기능이 있 는가?
내부
전력 Y
시간 Y
외부
움직임 Y
양 Y
Step 5 ~ Step 7의 측정은 표 4.2 ~ 표 4.5의 구성요소 중 무빙월에 해당하는 측정요소의 중요도( )와 측정값()를 설정하여, Sugeno 퍼지적분과 Choquet 퍼지적분인 식(4.3.3)과 식(4.3.4)에 대입하여 지능지수를 계산한다.
마지막으로 Step 8에서 지능 등급을 판정하는데, 무빙월의 경우 어느 한 가지 기능이 무빙월의 전체 성능을 좌우하거나 의미가 없어지는 성격이 크지 않기 때문에 Choquet 퍼지적분 값으로 지능을 판정한다. 측정된 지능지수는 그림 4.4 를 통하여 퍼지등급을 결정 할 수 있다.
그림 4.4 지능 등급 판정