MMS로부터 취득된 LiDAR 점군데이터의 반사강도 영상과 UAV 영상의 정합을 위한 특징점 기반 매칭 기법 연구
Feature-based Matching Algorithms for Registration between LiDAR Point Cloud Intensity Data Acquired from MMS and Image Data from UAV최윤조1) · Mohammad Gholami Farkoushi2)· 홍승환3)· 손홍규4)
Choi, Yoonjo·Mohammad Gholami Farkoushi·Hong, Seunghwan·Sohn, Hong-Gyoo
Abstract
Recently, as the demand for 3D geospatial information increases, the importance of rapid and accurate data construction has increased. Although many studies have been conducted to register UAV (Unmanned Aerial Vehicle) imagery based on LiDAR (Light Detection and Ranging) data, which is capable of precise 3D data construction, studies using LiDAR data embedded in MMS (Mobile Mapping System) are insufficient.
Therefore, this study compared and analyzed 9 matching algorithms based on feature points for registering reflectance image converted from LiDAR point cloud intensity data acquired from MMS with image data from UAV. Our results indicated that when the SIFT (Scale Invariant Feature Transform) algorithm was applied, it was able to stable secure a high matching accuracy, and it was confirmed that sufficient conjugate points were extracted even in various road environments. For the registration accuracy analysis, the SIFT algorithm was able to secure the accuracy at about 10 pixels except the case when the overlapping area is low and the same pattern is repeated. This is a reasonable result considering that the distortion of the UAV altitude is included at the time of UAV image capturing. Therefore, the results of this study are expected to be used as a basic research for 3D registration of LiDAR point cloud intensity data and UAV imagery.
Keywords : Mobile Mapping System, Unmanned Aerial Vehicle, Point Cloud Intensity Data, Reflectance Image, Feature Point Extraction
초 록
최근 3차원 공간정보에 대한 수요가 증가함에 따라 신속하고 정확한 데이터 구축의 중요성이 증대되어 왔다. 정
밀한 3차원 데이터 구축이 가능한 LiDAR (Light Detection and Ranging) 데이터를 기준으로 UAV (Unmanned Aerial Vehicle) 영상을 정합하기 위한 연구가 다수 수행되어 왔으나, MMS (Mobile Mapping System)로부터 취득
된 LiDAR 점군데이터의 반사강도 영상을 활용한 연구는 미흡한 실정이다. 따라서 본 연구에서는 MMS로부터 취
득된 LiDAR 점군데이터를 반사영상으로 변환한 데이터와 UAV 영상 데이터의 정합을 위해 9가지의 특징점 기반
매칭 기법을 비교·분석하였다. 분석 결과 SIFT (Scale Invariant Feature Transform) 기법을 적용하였을 때 안정적
으로 높은 매칭 정확도를 확보할 수 있었으며, 다양한 도로 환경에서도 충분한 정합점을 추출할 수 있었다. 정합 정
확도 분석 결과 SIFT 알고리즘을 적용한 경우 중복도가 낮으며 동일한 패턴이 반복되는 경우를 제외하고는 약 10
픽셀 수준으로 정확도를 확보할 수 있었으며, UAV 영상 촬영 당시 UAV 자세에 따른 왜곡이 포함되어 있음을 감안
할 때 합리적인 결과라고 할 수 있다. 따라서 본 연구의 분석 결과는 향후 LiDAR 점군데이터와 UAV 영상의 3차원
정합을 위한 기초연구로 활용될 수 있을 것으로 기대된다.
핵심어 : 모바일 매핑 시스템, 무인항공기, 점군데이터, 반사영상, 특징점 추출
453 Received 2019. 11. 02, Revised 2019. 11. 20, Accepted 2019. 11. 29
1) Member, School of Civil and Environmental Engineering, Yonsei University (E-mail: [email protected]) 2) School of Civil and Environmental Engineering, Yonsei University (E-mail: [email protected]) 3) Member, Stryx Inc. (E-mail: [email protected])
4) Corresponding Author, Member, School of Civil and Environmental Engineering, Yonsei University (E-mail: [email protected])
https://doi.org/10.7848/ksgpc.2019.37.6.453 Original article
This is an Open Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License (http://
creativecommons.org/licenses/by-nc/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
Journal of the Korean Society of Surveying, Geodesy, Photogrammetry and Cartography, Vol. 37, No. 6, 453-464, 2019
1. 서 론
최근 3차원 공간정보에 대한 수요가 증가하고 있으며, 이러 한 공간정보가 실생활과 연계됨에 따라 실제 공간상의 변화를 반영할 수 있는 신속하고 정확한 데이터 구축의 중요성이 증 대되고 있다. 또한 이동수단에 내비게이션 센서를 포함한 다중 센서를 탑재하여 데이터를 취득하는 MMS (Mobile Mapping System)의 활용성이 증가하는 추세에 있으며, 레이저 관측 및 항법 센서의 정확도가 향상됨에 따라 이동식 레이저 스캐너 는 모든 MMS의 주요 구성요소 중 하나가 되었다(Hong et al., 2017).
LiDAR (Light Detection and Ranging)는 고출력의 펄스레 이저를 이용하여 물체에 반사되어 돌아오는 레이저 빔의 시간 을 측정하여 거리정보를 취득하는 기술이다(COMPA, 2017).
LiDAR에 의해 취득된 점군데이터는 반사점으로부터 정확한 3 차원 데이터를 취득할 수 있으나, 차량에 탑재된 센서에 의해 데 이터를 취득하기 때문에 다른 물체에 의해 시야가 가려지거나 건물 지붕과 같은 경우에는 데이터 취득에 어려움이 있다. 반면 UAV (Unmanned Aerial Vehicle)를 이용하여 지상정보를 취득 할 경우에는 일반적으로 상공에서 촬영이 이루어지기 때문에 건물지붕 등 지상에서는 취득하기 어려운 정보에 대한 데이터 취득이 가능하다. 하지만 네트워크와 위성신호 강도가 약할 수 있는 도시지역에서는 오차가 수직방향에서 수 미터까지 발생 할 수 있다(Park et al., 2019). 이러한 경우 지상기준점 측량을 통해 UAV 영상의 파라미터를 보정하는 과정이 요구되는데 지 상기준점 측량에는 인력 및 시간 소요가 크다.
효율적으로 지상기준점을 추출하기 위해 UAV 영상과 광 학 참조영상의 정합을 위한 매칭 기법을 개발하기 위한 연구가 수행되어 왔으며(Conte and Doherty, 2008; Tsai and Lin, 2017;
Nho, 2018), 추출된 정합 쌍을 이용하여 UAV 파라미터 보정을 통해 정사영상을 생성할 수 있다. Yang and Chen (2015)은 광학 영상과 LiDAR 점군데이터의 융합은 기하학적 영역과 스펙트 럼 영역에서 모두 상호보완적이라고 하였으며, 항법장치를 탑 재한 MMS는 지물의 3차원 점군데이터를 실세계 좌표로의 정 밀한 보정이 가능함에 따라 지상기준점으로 활용이 가능하다.
LiDAR 점군데이터와 광학영상을 정합하기 위한 연구는 크게 세 가지로 구분할 수 있다. 첫 번째는 지물의 선형정보 를 이용하는 방법으로, 점군데이터로부터 건물을 분리하여 선 형정보를 추출하는 연구가 진행되었다(Yang and Chen, 2015;
Liu et al., 2016). 두 번째는 점군데이터로부터 DSM (Digital Surface Model)을 생성하고, 이를 이용하여 영상정합을 수행 하는 연구가 수행되어 왔다(Palenichka and Zaremba, 2010;
Abayowa et al., 2015; Persad and Armenakis, 2016). 점군데이 터로부터 생성된 DSM은 지표면이 유의한 높이 차이를 나타낼 경우 효율적으로 특징점의 추출이 가능하지만, 높이 차이가 존재하지 않는 지역에서는 적용이 어려울 수 있다(Persad and Armenakis, 2016). 세 번째로는 점군데이터가 포함하고 있는 반사강도 기반의 반사영상(reflectance image)을 생성하여 정 합점을 추출하는 연구가 수행되었다(Böhm and Becker, 2007;
Abedini et al., 2008). 원근시점(perspective view)에서 취득된 지상 레이저 스캐너(TLS: Terrestrial Laser Scanner) 데이터 를 대상으로 연구가 수행되어 왔으며, LiDAR 거리영상(range image) 보다 반사영상에서 많은 특징점이 추출됨을 확인하였 다(Abedini et al., 2008).
이와 같이 최근 3차원 공간정보의 활용성이 증대됨에 따라 UAV 영상과 LiDAR 데이터를 정합하기 위한 연구가 활발하게 이루어지고 있으며, MMS로부터 취득된 데이터의 정확도가 향 상됨에 따라 도로정보를 활용한 기준점 추출방법을 개발하기 위한 연구가 필요한 시점이다. 점군데이터와 영상 데이터를 정 합하기 위해 점군데이터의 선형정보를 이용하거나 DSM 데이 터로 변환하여 특징점을 추출하는 경우가 대부분이다. 하지 만 이러한 경우에는 대상지역 내에서 높이 차이가 존재할 경 우에만 특징점 추출에 적용이 가능하며, 도로와 같이 높이 차 이가 존재하지 않은 지역에서는 적용에 어려움이 있다. 점군데 이터를 반사영상으로 변환하여 적용하는 경우에는 주로 원근 시점에서 취득된 점군데이터를 대상으로 적용되어왔으며, 지물 의 반사특성에 따라서 특징점 추출의 결과가 달라질 수 있다.
MMS로부터 취득된 LiDAR 점군데이터는 정밀한 도로 상의 3차원 데이터 구축이 가능하지만, 도로의 경우에는 높이의 차 이를 이용하여 정합점을 추출하기에는 어려움이 있다. 하지만 각 점은 스캔 대상 표면의 레이저 반사정도를 표현하는 강도 (intensity)값을 포함하고 있으며, 도로 아스팔트의 경우에는 낮 은 반사강도 값을 갖는 역청(bitumen)이 주재료로 구성되는 반 면에 노면표시는 역반사하는(retro-reflective) 재질로 구성되어 있다(Kim, 2005; Guan et al., 2014). 따라서 이러한 반사강도 값 의 차이를 이용하면 도로 노면으로부터 유효한 특징점 추출이 가능하다.
따라서 본 연구에서는 MMS로부터 취득한 3차원 LiDAR 점 군데이터를 정사영상과 같은 평면시점(top view)에서 바라본 2 차원 반사영상으로 변환한 후, UAV 영상과 LiDAR 반사영상 데이터의 정합 가능성을 검증하고자 하였다. LiDAR 반사영상 과 UAV 영상의 정합을 위한 특징점 기반의 매칭 기법을 상호 비교·분석하고자 하였으며, 매칭 정확도와 정합 정확도의 두 가 지 방법을 이용하여 정확도를 평가하였다.
455
2. 연구의 방법
MMS로부터 취득된 LiDAR 점군데이터와 UAV 영상의 매 칭 기법 분석을 수행하기 위한 연구의 흐름은 Fig. 1과 같다.
MMS로부터 취득된 3차원 LiDAR 데이터와 UAV 영상을 정합 하기 위한 정합점을 추출하기 위해 본 연구에서는 3차원 점군 데이터로 구성된 LiDAR 데이터를 평면시점 영상으로 변환하 여 매칭 기법을 적용하였다. 이후 잘못된 정합쌍을 제거하기 위 해 RANSAC (RANdom SAmple Consensus) 알고리즘을 적용 하였으며, 최종적으로 추출된 정합쌍을 이용하여 변환계수를 추정하였다. 이를 기반으로 매칭 정확도와 정합 정확도의 두 가 지 측면에서 정확도 평가를 수행하였다.
Fig. 1. Study flow
2.1 분석 데이터 개요
본 연구에서는 MMS로부터 취득된 LiDAR 점군데이 터와 UAV 영상을 이용하여 정합점을 추출하고자 하였다.
LiDAR 장비를 통해 취득되는 데이터는 레이저 광 펄스가 물체에 반사되어 돌아오는 정보를 이용하여 3차원 모델을 구성하며, Fig. 2(a)와 같이 MMS 차량이 지나가는 경로에 따라 가까운 지역의 경우에는 밀도가 높은 점군데이터의 취 득이 가능하지만 차량에서 멀어질수록 레이저 광선이 충분 히 도달하지 못하기 때문에 점군데이터의 밀도가 낮아지는 것을 확인할 수 있다. UAV 영상의 경우에는 Fig. 2(b)와 같 이 상공에서 촬영이 이루어지기 때문에 평면시점에서의 지 상정보 취득이 용이하며, 특히 도로 상황에 대한 정보 취득 이 가능하다.
(a) MMS point cloud data (b) UAV image data Fig. 2. Example of MMS point cloud and UAV image data
2.2 MMS 점군데이터의 2차원 영상 변환
3차원 점군데이터와 2차원 영상데이터의 정합점을 추출하 기 위해서는 다양한 표고로부터 정보를 추출하는 것이 용이하 기 때문에, 건물 등과 같이 표고가 변하는 지점의 정보를 활 용하기 위해 점군데이터로부터 DSM을 생성하여 매칭 기법을 적용하는 연구가 주로 이루어져 왔다(Persad and Armenakis, 2016; Abayowa et al., 2015). 하지만 DSM과 2차원 영상 사이의 매칭을 수행할 경우, 건물과 같이 높이 차이가 분명하게 나타나 는 지역에서는 일정 수준의 성능이 확보될 수 있지만, 논, 밭, 도 로 등 평탄한 지역에서는 적용이 어려울 수 있다. MMS와 같은 도로 노면을 중심으로 데이터를 취득하는 경우 노면에 대해서 는 밀도 높은 데이터의 취득이 가능하며, 노면과 노면표시의 반 사특성을 이용하여 정합점의 추출이 가능하다.
LiDAR 점군데이터를 영상 데이터로 변환하기 위해 일반적 으로 가장 많이 사용하는 방법 중 하나로 점 데이터를 격자 형 식으로 변환하는 방법이 있다(Fernandez et al., 2007). 따라서 본 연구에서는 점군데이터를 격자 형식으로 변환하기 위해 격 자영상을 생성하고 점군데이터로부터 반사강도 값을 추출하여 반사영상을 생성하였다. 본 연구에서 사용한 원 LiDAR 점군데 이터는 약 5cm 간격으로 구성되어 있으며, 이에 따라 2차원 영 상을 구성하기 위하여 5cm 격자영상을 구성하였다. 또한 본 연 구에서는 도로 노면으로부터 정합점을 추출하고자 하였으며, 도로의 경우 지물 중에서도 가장 낮은 곳에 위치할 가능성이 높다. 따라서 이와 같이 구성된 5cm×5cm의 격자에 해당되는 반사강도를 할당하기 위하여 각 격자에 해당하는 점군데이터 중 표고 Z값이 가장 낮은 점의 반사강도 값을 적용하였다.
(a) MMS image data (b) Histogram from MMS image Fig. 3. Example of MMS image data and histogram
Journal of the Korean Society of Surveying, Geodesy, Photogrammetry and Cartography, Vol. 37, No. 6, 453-464, 2019
MMS로부터 취득한 LiDAR 데이터는 도로에서 먼 외부 지 역 또는 일부 도로 지역에서 반사정보를 취득하지 못할 수 있으 며, 이로 인해 5cm×5cm 격자 내에 반사강도가 없는 빈 격자가 존재할 수 있다. 본 연구에서는 도로 노면 표시로부터 특징점을 검출하고자 하였으며, 도로 상에 이러한 빈 격자가 존재할 경우 현저한 값을 가지는 빈 격자가 특징점으로 검출될 수 있다. 이 는 결국 데이터 내에 빈 격자가 다수 존재할 경우 특징점 기반 의 매칭 결과에 영향을 미칠 수 있다는 것을 의미한다. 이러한 문제를 해결하기 위해 각 픽셀이 포함하고 있는 반사강도의 통 계값을 이용하고자 하였다.
분석에 사용된 MMS 데이터의 경우에는 도로 노면을 중심 으로 데이터가 구축되어 있으며, 이에 따라 MMS 반사영상은 도로 노면으로부터 취득된 반사강도 정보가 대부분을 이루고 있을 가능성이 높다. 따라서 Fig. 3과 같이 MMS 반사영상에 대 한 히스트로그램을 작성한 후 빈도수가 가장 높은 반사강도 값 을 빈 픽셀에 부여하였다. 이를 통해 오검출되는 특징점의 수를 현저하게 저감시킬 수 있을 뿐만 아니라 노면 표시 정보를 이용 하여 보다 정확한 정합점 추출이 가능할 수 있다.
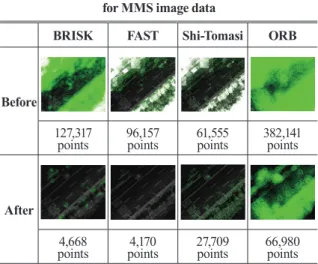
Table 1은 MMS 반사영상에 대한 전처리 적용 전과 후를 비 교한 결과이다. 전처리 적용 전 특징점 검출 결과를 살펴보면 빈 픽셀이 다수 존재하는 지역에서 다수의 특징점이 검출된 것을 확인할 수 있으며, 이러한 특징점들은 정합점 추출 결과에 영향 을 줄 수 있을 뿐만 아니라 불필요한 연산과정을 수행하게 된다.
본 연구에서 제안한 전처리 방법을 LiDAR 데이터에 적용한 결 과 추출된 특징점의 수는 최대 20배 이상 감소된 것을 확인할 수 있으며, 도로 노면 표시에 대해 특징점이 보다 뚜렷하게 검출 된 것을 확인할 수 있다(Table 1).
Table 1. Example of results before and after preprocessing for MMS image data
BRISK FAST Shi-Tomasi ORB
Before
127,317
points 96,157
points 61,555
points 382,141 points
After
4,668
points 4,170
points 27,709
points 66,980 points
2.3 특징점 기반 영상매칭 기법
본 연구에서는 MMS에서 취득한 점군데이터의 반사영상과 UAV 영상과의 정합점 추출을 위하여 기존에 잘 알려져 있는 특징점 기반의 매칭 기법을 적용하였다. 특히 BRISK (Binary Robust Invariant Scalable Keypoints), FAST (Features from Accelerated Segment Test), Harris corner, Shi-Tomasi, MSER (Maximally Stable External Regions), ORB (Oriented FAST and Rotated BRIEF), SURF (Speed Up Robust Features), KAZE, SIFT의 총 9가지 매칭 기법을 비교·분석하였다.
Harris and Stephens(1988)는 Moravec(1980)이 제안한 영상 에서 윈도우를 이동시킬 때 모서리점에서는 모든 방향으로 영 상변화가 커진다는 기본 개념을 바탕으로 Harris corner 기술 자를 개발하였다. Harris corner 기술자는 Moravec의 모서리 기술자를 개선한 알고리즘으로 밝기 정보의 비교가 아닌 지 역적 신호의 상호관계를 기반으로 모서리의 강도를 비교하기 때문에 회전과 비율, 조명 및 영상의 노이즈에 대해 매우 강력 한 특징검출 성능을 보여준다(Schmind et al., 2000). Shi and Tomasi(1994)는 Harris corner 기술자를 기본으로 정확도를 개 선하기 위해 Shi-Tomasi corner 기술자를 개발하였다. Harris corner 기술자는 윈도우의 이동에 따른 두 영상 간의 차이에 대한 제곱합(SSD: Sum of Difference)을 이용하여 현저한 값 을 가지는 곳을 모서리로 정의한다. 여기서 특징점을 추출하는 데 있어서 특정 행렬의 고유값(eigenvalue)이 이용되며, Harris corner 기술자의 경우에는 두 개의 고유값에 의해 계산되는 반 면에 Shi-Tomasi corner 기술자는 2개의 고유값 중 작은 고유값 이 특정 임계값보다 큰 경우 특징점으로 분류된다.
Lowe(2004)이 제안한 SIFT 알고리즘은 가장 널리 알려진 특 징점 검출 및 서술 알고리즘이다. 기존의 Harris corner 기법이 가지고 있는 영상의 스케일 변화에 민감한 문제를 해결하기 위 하여 가우시안 차분 검출기(DoG: Different-of-Gaussian)를 기 반으로 이미지 내에서 뿐만 아니라 스케일 축으로도 코너성이 극대인 점을 찾는 방법이다. SIFT는 스케일 변화에 영향이 적은 특징점을 추출할 수 있다는 장점이 있으나, 계산비용이 높다는 특징을 가지고 있다(Tareen and Saleem, 2018). SURF 알고리즘 은 연산량을 감소시키기 위해 특징점을 추출하고 기술자를 생 성하는 과정에서 적분 영상(integral image)을 사용하였다. 검 출된 특징점 중심에서 주 방향성(dominant orientation)에 대한 각도를 추출하고 하위영역 내에서 기울기 정보를 표현 벡터로 사용한다는 점에서 SIFT와 유사하나, SIFT는 필터 사이즈를 고정시키고 영상 스케일을 변화시키면서 특징을 추출하는 반 면에 SURF는 영상 스케일을 고정시키고 박스 필터 크기를 변 경하면서 적용한다는 점에서 차이가 있다. ORB 알고리즘은 연
457 산량이 많은 SURF와 SIFT를 보완하기 위해 개발되었으며, 특
징점의 주요 방향각을 계산하여 이진 스트링 추출 시에 반영함 으로써 기존의 알고리즘에 방향성을 추가한 것이 가장 큰 특징 이다 (Tareen and Saleem, 2018).
MSER은 허프 변환을 이용한 영역 검출과는 다르게 윤곽선 이미지를 사용하지 않고, 이미지 자체를 이용하여 영역을 검출 하는 방법으로 다른 각도에서 촬영된 두 영상 사이의 정합점을 찾기 위해 제안되었다(Matas et al., 2004). MSER 검출 방법은 어파인(affine) 영역 검출 방법들 중에서 크기 변화와 회전에 매 우 강한 특징을 가지고 있다(Mikolajczyk et al., 2005). FAST 알 고리즘은 주변 픽셀 간의 밝기 값 차이를 이용하여 빠르게 특징 점을 검출하는 방법이다(Rosten and Drummond, 2006). FAST 알고리즘은 단순한 픽셀 밝기 값의 비교를 통해 특징점을 검 출하기 때문에 영상이 포함하고 있는 노이즈에 민감하며 스케 일 변화를 고려하지 못한다는 특징이 있다(Kim et al., 2012).
BRISK 알고리즘의 기술자는 영상회전 불변성을 만족시키기 위해 각 특징점의 고유 방향성(characteristic direction)을 식별 하는데 기초를 두고 있으며, 스케일과 회전에 불변하는 특징이 있다(Verma and Chandran, 2016). KAZE 알고리즘은 비선형 확산 필터링(non-linear diffusion filtering)을 통해 비선형 스케 일 공간(non-linear scale space)을 이용하며, 특징 기술자는 검 출된 각 특징을 중심으로 원형 영역에서 지배적인 방향을 찾음 으로써 회전 불변성의 속성을 도입하였으나 비선형 스케일 공 간의 구축으로 인해 계산비용이 높다(Alcantarilla et al., 2012).
2.4 RANSAC 알고리즘
매칭 기법을 이용하여 추출된 정합쌍에는 잘못된 정합쌍이 포함될 수 있으며, 이러한 오정합쌍을 제거하기 위해 본 연구에 서는 RANSAC (RANdom SAmple Consensus) 알고리즘을 적 용하였다. RANSAC 알고리즘은 Fischler and Bolles(1981)에 의 해 제안되었으며, 이상치를 포함하고 있는 초기 정합쌍에 대해 오정합쌍을 제거하기 위한 방법이다. 이 기법은 무작위로 선택 된 최소의 관측값을 이용하여 모델 변환계수 파라미터를 추정 하고, 다른 정합쌍이 이 모델을 지원하는지 여부를 확인함으 로써 수행된다(Kim and Im, 2003). 모델 변환계수는 Eq. (1)의 호모그래피 행렬(H)을 통해 구할 수 있다. 특정 횟수동안 이러 한 절차를 반복수행하고, 가장 큰 지지를 받는 최적의 모델을 선택한다.
or
(1)
Where X1 and Y1 are the coordinates of the feature point of the previous frame, and X2 and Y2 are the coordinates changed by the homography matrix.
X2 와 Y2가 정합되었던 좌표와 유클리디언 거리를 통해서 가 장 차이가 작은 모델을 찾아서 최종 정합쌍을 추출하게 된다 (Park et al., 2015).
2.5 정확도 평가 방법
본 연구에서 적용된 각 매칭 기법과 RANSAC 알고리즘을 통해 추출된 최종 정합쌍에 대한 정확도를 평가하기 위해 매 칭 정확도와 정합 정확도의 두 가지 방향으로 분석을 수행하 였다. 매칭 정확도를 측정하기 위해 주로 사용되는 방법은 추 출된 정합쌍에서 참인 정합쌍의 수와 오정합쌍의 수를 이용 하여 구할 수 있다(Mikolajczyk and Schmid, 2005; Miksik and Mikolajczyk, 2012; Peng et al., 2016). 또한 이종 영상의 정합 정확도를 확인하기 위해 RMSE (Root Mean Square Error)가 일반적으로 가장 많이 사용되며(Li et al., 2009; Tsai and Lin, 2017), 이에 따라 본 연구에서는 다음과 같이 정확도 평가를 수 행하였다.
2.5.1 매칭 정확도 산정
Lindeberg(2015)는 매칭 성공 기준을 정하기 위해 각 영상에 서 추출된 정합점을 중심으로 원형범위를 설정하고 변환계수 를 통해 변환된 정합쌍의 중복도를 이용하여 매칭 성공여부를 판단하였다. 본 연구에서는 이러한 개념을 기반으로 기준 정합 점을 중심으로 임계값을 부여하여 참인 정합쌍을 추출하였다.
분석에 사용된 각 영상으로부터 검사점을 추출하고 이를 이 용하여 어파인 변환계수를 산정하였다. 검사점을 이용하여 산 정된 어파인 변환계수를 UAV 영상으로부터 추출된 정합점에 적용하였으며, 이때 변환된 UAV 영상의 정합점이 MMS 영상 의 정합점을 기준으로 특정 범위 내에 포함되면 참인 정합쌍으 로 간주하였다. 본 연구에서 사용된 UAV 영상의 경우 촬영각 도에 따라 왜곡 정도가 심할 수 있다. 따라서 충분한 범위를 임 계값으로 설정하고자 하였으며, 매칭 기법을 통해 MMS 영상 에 대해 추출된 정합점으로부터 20픽셀(약 1m) 이내로 들어오 면 참값으로 산정하였다. 매칭 정확도를 구하는 방법은 식 (2) 와 같다.
or
(2)