ELA: 가변 형상 구조로봇의 자율주행을 위한 실시간 장애물 회피 기법
ELA: Real-time Obstacle Avoidance for Autonomous Navigation of Variable Configuration Rescue Robots
정 해 관
1
, 현 경 학2
, 김 수 현3
, 곽 윤 근4
Hae Kwan Jeong
1
, Kyung Hak Hyun2
, Soo Hyun Kim3
, Yoon Keun Kwak4
Abstract
We propose a novel real-time obstacle avoidance method for rescue robots. This method, named the ELA(Emergency Level Around), permits the detection of unknown obstacles and avoids collisions while simultaneously steering the mobile robot toward safe position. In the ELA, we consider two sensor modules, PSD(Position Sensitive Detector) infrared sensors taking charge of obstacle detection in short distance and LMS(Laser Measurement System) in long distance respectively. Hence if a robot recognizes an obstacle ahead by PSD infrared sensors first, and judges impossibility to overcome the obstacle based on driving mode decision process, the order of priority is transferred to LMS which collects data of radial distance centered on the robot to avoid the confronted obstacle. After gathering radial information, the ELA algorithm estimates emergency level around a robot and generates a polar histogram based on the emergency level to judge where the optimal free space is.
Finally, steering angle is determined to guarantee rotation to randomly direction as well as robot width for safe avoidance. Simulation results from wandering in closed local area which includes various obstacles and different conditions demonstrate the power of the ELA.
Keywords:
ELA(Emergency Level Around), Obstacle Avoidance, USAR(Urban Search and Rescue)
1. 서 론
구조로봇은 지진이나 화재, 건물 붕괴와 같은 재난이 발생했을 때 인간 대신 재난 환경에 투입되어 추가 인 명피해를 차단함과 동시에 희생자의 위치와 상태를 파 악하고, 조종자의 명령에 따라 조치를 취하는 특수목적 용 로봇이다. 이러한 구조로봇은 사회 안전과 복지 향 상을 목표로 하는 USAR(Urban Search and Rescue)의 개 념으로 현재 세계 각국에서 개발 및 응용되고 있다.
구조로봇 관련 연구는 정해진 작업 환경에서 높은 신 뢰 수준의 주행성을 발휘할 수 있는 메커니즘 개발에 초점을 두고 발전해왔다. 구조로봇의 메커니즘은 대형 에서 중·소형으로, 보행형(Leg Type)에서 바퀴형(Wheel
Type)과 트랙형(Track Type)을 거쳐 단위형(Modular Type)으로 진보하고 있는 가운데 가장 많은 사례를 보 유하고 있는 것은 트랙형 메커니즘이다. 트랙형 구조로 봇은 현재까지 개발된 구조로봇의 종류 중 가장 많은 수를 차지하고 있는 형태로 탱크의 무한궤도를 기본으 로 하며 구현 시 제어가 용이하고, 설계 단계에서 이미 험로 주행까지 고려하므로 실내/외를 막론하고 탁월한 주행 성능을 보장한다는 장점이 있다. 대표적인 응용 사례로는 iRobot의 Packbot(2000)을 들 수 있다. Packbot 은 USAR 및 군사 활용 목적으로 개발되어 9·11 테러 시 탐색 위주의 구조작업과 미군의 아프가니스탄 주둔 시 기지 주변 정찰 등으로 활용된 바 있다. 이 외에도 Micro-VGTV(Inuktun, 1995), Talon(Foster and Miller, 2000), Solem(Foster and Miller, 2000), Urbot(SPAWAR, 2001) 등의 트랙형 구조로봇이 탐색 및 환자이송의 구조작업을 보 조한 기록이 있다
[1]
.
※ 본 연구는 한국과학기술원 국방무인화기술 특화연구센터를 통한 국방과학연구소 연구비 지원으로 수행되었음.
1,2
한국과학기술원 기계항공시스템학부 기계공학전공 박사과정3,4
한국과학기술원 기계항공시스템학부 교수모색하는 것이다. 따라서 이러한 기능이 원만하게 이루 어지려면 센서 정보의 신뢰성을 바탕으로 한 장애물 극 복 및 회피 기능이 가장 먼저 구현되어야 한다. 이에 본 연구에서는 센서 정보만을 이용하여 주변 환경을 올바 르게 인식하고 대처하는 주행로봇의 장애물 회피 기술 에 맥락을 두고, 재난 환경으로의 구조로봇 투입 시 신 속하게 작업 구역을 유랑(Wandering)할 수 있는 새로운 개념의 실시간 장애물 회피 기법을 소개한다.
2. 시스템 개요
본 장에서는 구조로봇의 구체적인 활용 시나리오와 Testbed로 생각하고 있는 주행로봇 VSTR(Variable Single- tracked Robot)에 대해 소개한다.
구조로봇이 재난 환경에 투입되어 구조작업을 수행할 때에는 조종자와 로봇간의 가변적 주종 관계를 토대로 진행된다. 예를 들면 초기에 로봇이 외부로부터 투입되어 첫번째 작업 구역에 도달하기까지는 조종자가 주가 되어 로봇의 이동 경로를 지시한다. 그러나 로봇이 정해진 작 업 구역에 도착한 이후부터는 로봇이 주가 되어 자율주 행을 수행하면서 희생자를 찾아 유랑하고, 이는 한 구역 에 대한 작업이 완료될 때까지 계속된다. 그리고 다음 구 역으로 이동할 시에는 다시 조종자가 주가 되어 로봇을 다음 구역으로 안내한 뒤 이전과 같은 과정이 반복된다.
이러한 일련의 과정이 순조롭게 진행되기 위해서는 험지 에 대한 적응성과 생체 신호를 감지할 수 있는 센서의 장착, 조종자와 로봇간의 통신, 지혈이나 구호 물품 조달 을 위한 Dexterous Manipulator, 그리고 자율적인 장애물 극복 및 회피 기능 등이 선행되어야 한다. 여기서 자율적 인 장애물 극복 및 회피 기능은 로봇이 작업 중 불시에 맞닥뜨리게 되는 장애물에 대해 극복이나 회피 여부를 스스로 결정한 뒤 행동하는 것으로 구조작업의 신속성을 유지하고 신뢰성을 향상시키는 역할을 한다.
본 논문에서는 구조로봇의 자율적인 장애물 극복 및
그림 2. PSD 센서 시스템을 이용한 장애물 인식
회피 기능을 구현하기 위해 제작된 트랙형 주행로봇 VSTR을 소개한다. 그림 1은 VSTR의 구동부 형상에 따 른 2가지 주행모드를 보여준다. 그림에서 알 수 있듯이 VSTR은 가변 형상 단일 트랙 메커니즘을 기본으로 설계 되어 평상시에는 납작한 형태로 주행하다가 계단과 같은 장애물이 나타나면 구동부 형상을 변형하여 극복할 수 있는 구조를 갖고 있다. 선행 연구에서는 VSTR의 자율 적인 장애물 극복을 그림 2와 같은 PSD(Position Sensitive Detector) 센서 시스템을 이용하여 구현하였다. 이 시스템 은 로봇 앞부분에 장착되어 전방에 존재하는 장애물의 높이
h
와 경사각γ
을 다음과 같이 예측할 수 있도록 해준다.α
h
sini d
h
h
= + (1) cos )( sin tan
1
l h
h
d d
d
=
−
−α
γ α
(2)이후에는 장애물의 높이와 경사각 및 각각에 대한 문턱 값(Threshold)
ψ h 1
,ψ h 2
,ψ a
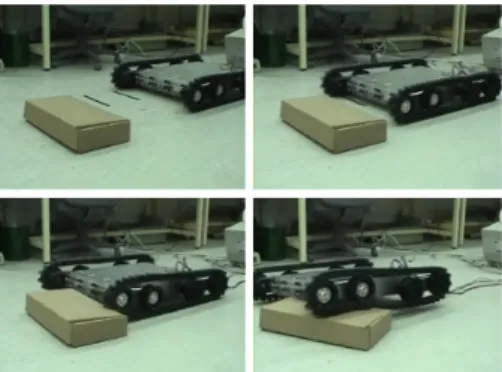
를 통해 현재 맞닥뜨린 장애 물이 주행모드 변형으로 극복 가능한지의 여부를 그림 3 과 같은 주행모드 결정 알고리즘으로부터 판단한 뒤 자 율적인 장애물 극복을 수행한다. 그림 4와 그림 5는 각각 낮은 높이의 장애물과 계단 장애물에 대한 VSTR의 자율 적인 장애물 극복 과정을 보여준다[2]
.그림 3. VSTR의 주행모드 결정
한편 자율적인 장애물 회피 기능은 극복이 불가능한 장애물에 대하여 선택되는 가상의 주행모드로 로봇과 주 변 장애물간의 방사형 거리를 추출할 수 있는 LMS(Laser Measurement System)를 추가로 장착했을 때 가능해진다.
이 때 주의해야 할 점은 전방의 장애물을 안전하게 회피 하면서도 신속성을 잃지 말아야 한다는 것이다. 기존의 구조로봇 기반 장애물 회피 기능은 대부분이 조종자에 의해 수행되었기 때문에 안전한 회피는 보장할 수 있었 으나 신속성은 보장할 수 없었다. 또한 작업 내내 조종자 가 카메라와 같은 시각 센서로 주변 환경을 확인해야 하 기 때문에 효율이 낮다는 단점도 있다. 따라서 조종자의 부담을 덜어줌과 동시에 작업의 정확성과 효율을 향상시 키기 위해 자율적인 장애물 회피 기능은 반드시 구현되 어야 한다.
3. ELA(Emergency Level Around) 본 장에서는 구조로봇을 위한 실시간 장애물 회피 기 법 ELA(Emergency Level Around)를 소개한다. 주행로봇 의 실시간 장애물 회피는 전역 경로계획(Global Path Planning)과 함께 자율주행을 위한 필수 요소로 각광받 고 있는 가운데 현재까지 VFF(Virtual Force Field)
[3]
, VFH(Vector Field Histogram)[4]
, DWA(Dynamic Window Approach)[5]
, ND(Nearness Diagram)[6]
등의 알고리즘이 개 발되어 실험적인 검증까지 마친 상태이다. 그러나 이러 한 기법들은 모두 출발점과 목표점이 존재하는 환경에 서 로봇이 목표점까지 얼마나 빨리 그리고 부드럽게 이 동하는지에 초점을 두고 있어서 센서에 탐지되는 모든 장애물과 로봇 자신의 위치를 바탕으로 최적의 경로를 생성해야 하는 번거로움이 있다. 그러나 구조로봇의 장 애물 회피는 작업 구역 내에 목표점이 존재하지 않고,그림 4. VSTR의 낮은 높이 장애물 극복
그림 5. VSTR의 계단 장애물 극복
전방의 장애물이 극복 가능한 장애물이라면 주행모드 변형을 통해 극복함으로써 신속성을 유지해야 하므로 일반적인 주행로봇의 장애물 회피와는 기본 배경이 다 르다고 할 수 있다. 또한 VSTR의 장애물 회피는 제자 리 회전을 통한 조향을 기본으로 하기 때문에 속도나 가속도와 같은 동역학 요소를 배제해도 된다는 장점이 있다.
지금부터 소개하는 ELA는 VSTR의 자율적인 장애물 극복 기능과 연동하여 국소 지역에서의 자율주행을 가 능케 한다. 우선 VSTR의 주행모드 결정 과정에서 장애 물 회피가 결정되면 LMS를 이용하여 로봇과 주변 장애 물간의 방사형 거리
d 를 구하고, 이로부터 Emergency i
LevelF 를 다음과 같이 정의할 수 있다. i
max
1
d
F i
= −d i (3)
여기서
d max 는 LMS의 최대 탐지 거리를 뜻하므로 F i
는 0과 1사이의 값을 갖게 된다. 한편 VSTR의 주행속도가
약 0.5m/sec임을 감안하면 VSTR로부터 2m 정도의 거리를
두고 존재하는 장애물은 그리 위협적이지 않다고 할 수 있다.
명령할 수 있는 것이다.
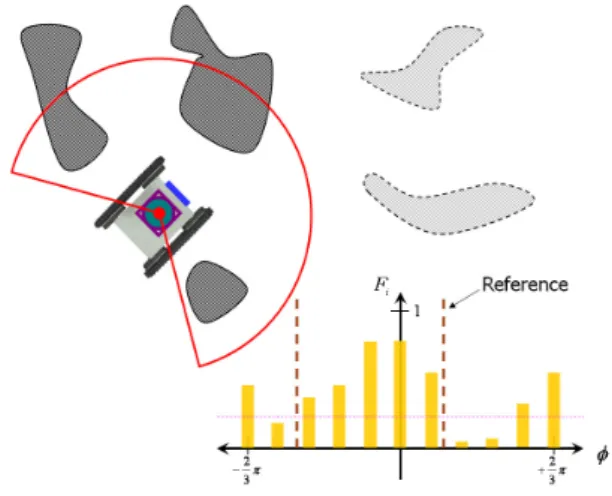
한편 위 내용을 반영하여 조향 영역에 대한 Emergency Level을 도식화하면 Polar Histogram이 완성된다. Polar Histogram은 로봇의 현재 진로 방향을 중심으로 왼쪽과 오른쪽의 장애물 배치 및 위험 수준을 보여준다. 이 때 현재 진로 방향에서 양 방향으로 가장 가깝게 문턱값 미만의
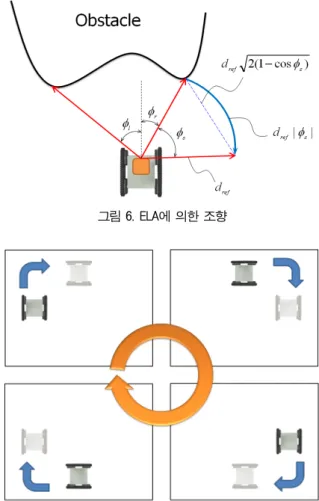
F i 가 출현하는 때의 조향각(Steering Angle)을 찾아 회피 대상 장애물의 경계로 규정하고, 이 중 현재 진로 방 향과 가까운 쪽의 경계를 조향 기준 φ ref 으로 삼는다. 이는 장애물을 최대한 작은 조향각으로 안전하게 회피하기 위한 수단이다. 이후에는 다음을 만족하는 φ s 를 찾는다.
ε
φ = +
− s R
ref w
d 2 ( 1 cos ) (4)
위 식에서
d ref 는 φ ref 에서의 로봇과 장애물간의 거리이 고 w R 은 로봇의 너비이다. 이는 그림 6과 같이 로봇이 조 향을 위해 회전할 때 로봇 너비 이상의 공간을 확보하기 위한 과정이다. 그리고 ε 은 로봇 너비 요소인 현의 길이 가 로봇 너비보다 확실히 크게 함으로써 안전성을 확보하 는 보정 상수이다. 따라서 위 식에 의하여 조향을 수행한다 면 가까운 거리에 있는 장애물에 대해서는 큰 조향각을 내 고 , 비교적 먼 거리에 있는 장애물에 대해서는 작은 조향각 을 내게 될 것이다. 한편 φ s 이 구해지면 최종적인 조향각 φ 은 다음과 같이 정의될 수 있다.
φ δ φ
φ = + +
2
s
ref (5)
반시계 방향의 조향을 기준으로 했을 때 위의
δ 는 로봇이 왼쪽으로 회전할 때에는 0과 π / 2 사이의 값을, 오른쪽으로 회전할 때에는 − π / 2 와 0 사이의 값을 갖는 Random Variable이다. 이는 로봇이 Local Minimum에 빠지지 않으면서 전체적으로 구석구석 돌아다닐 수 있는 요소를 삽입한 것이다. 예컨대 장애물이 산재해있지 않은 직사각
그림 6. ELA에 의한 조향
그림 7. Random Variable 배제 시의 Local Minimum
형 작업 구역의 경우, 로봇이 작업 구역 경계에 수직으로 맞닥뜨리면 δ 를 고려하지 않은 상황에서 90 ˚ 에 가까운 조향각을 내면서 회전할 것이다. 그리고 이후에는 작업 구 역 경계에 항상 수직으로 맞닥뜨리게 되고, 이에 대한 대처 또한 동일할 것이므로 로봇은 그림 7과 같이 작업 구역 주 위만 돌게 되는 Local Minimum에 빠지게 된다. 한편 δ 를 고려하지 않은 상황에서 장애물을 만난다면 충돌을 피할 수 있는 최소의 조향각을 통해 회피할 것이므로 로봇의 이 동 경로가 장애물의 외곽을 추종하게 되어 작업 구역 전체 를 봤을 때 장애물과 장애물 사이의 공간을 배제하는 결과 를 초래할 수 있다. 따라서 최소의 조향각을 추구한다는 원 칙 하에 작업 구역을 골고루 유랑할 수 있도록 하는 Random Variable δ 를 고려하는 것이 타당하다. 지금까지 설명한 내용을 바탕으로 ELA의 알고리즘을 정리하면 다음 과 같다.
A. 장애물 회피 결정
B. LMS를 통한 로봇과 장애물 간의 방사형 거리 측정
그림 8. ELA의 순서도
C. Emergency Level
F i 를
정의하고 문턱값ψ ϕ 을
대입한 Polar Histogram 작성D. 현재 진로 방향을 기준으로 양 방향에서 가장
가깝게
문턱값 미만의F i 가
출현하는 조향각을장애물
경계로 규정E. 장애물 경계 중 현재 진로 방향과 가까운 것을 조향
기준으로
선정F. 로봇의 너비 이상의 공간 확보를 위한 조향각
φ s
정의G. Random Variable
δ 를
고려한 최종 조향각φ
정의그림 8은 ELA의 전 과정을 VSTR의 자율적인 장애물 극복 기능이 포함된 Main Loop의 연동을 고려하여 순서 도로 표현한 것이고, 그림 9는 ELA에 의한 장애물 회 피 과정을 도식화한 것이다. 위의 논리에 의하면 VSTR 의 주행은 PSD 센서 시스템의 장애물 인식에 의한 직 진 주행과 LMS 및 ELA에 의한 회전으로 모든 이동 경 로를 표현할 수 있다. 즉, 임의의 작업 구역에서 출발한 VSTR이 장애물을 만날 때까지 직진하다가 장애물을 만 나면 장애물 극복과 회피 중 하나를 선택하여 극복하는 경우에 대해서는 주행모드 변형과 함께 직진 주행을 고 수하고, 회피하는 경우에 대해서는 ELA의 구동과 함께 회전을 모색하는 것이다.
그림 9. ELA에 의한 VSTR의 장애물 회피
ELA는 기존의 장애물 회피 기법과 비교해볼 때 구현 의 용이성, 적은 계산량, 로봇의 형상이나 동역학 요소 등에 구애 받지 않는다는 점 등의 장점이 있다. 또한 알 고리즘의 특성상 구조작업 외에 정찰, 위험물 탐지 등 의 용도로도 활용될 수 있을 뿐 아니라 청소로봇의 주 행 성능 향상으로 인한 서비스 개선에도 이바지할 수 있을 것으로 사려된다. 한편 알고리즘의 구조로 볼 때 ELA는 VFH와 그 맥락이 유사하지만 목표점 기반 주행 이 아닌 상황에서 주변 환경이 매우 혼잡할 때에도 안 정적으로 적용할 수 있다는 점에서 차별성이 있다 하겠 다. 또한 ELA는 자율주행과 더불어 조종자 기반 주행 이 곁들여진 Shared Control까지 고려한다면 보다 고난이 도의 작업을 완수할 수 있을 것이다.
4. 모의실험 결과
본 연구에서는 개발된 ELA의 실용성을 검증하기 위 해 다양한 조건에 대하여 모의실험을 수행하였다. 작업 구역의 형태는 정사각형으로 가정하였으며 VSTR의 실 제 크기를 고려하여 장애물과의 간섭 여부를 점검하였 다. 또한 ‘PSD 센서 시스템 기반 주행(검은색)’과 ‘LMS 기반 주행(녹색)’을 구분하여 ELA가 구동되는 시점을 확인하였다.
4.1 초기 위치 변화
작업 구역 내에서 로봇의 초기 위치가 ELA 기반의 장애물 회피에 어떤 영향을 미치는지 알아보기 위한 모 의실험을 수행하였다. 그림 10은 로봇의 초기 위치 (x
0
,y0
)가 각각 (28.5,7), (2,2.5), (12.5,22.5)일 때의 진행 상(a)
(b)
(c)
그림 10. 초기 위치 변화에 따른 ELA의 성능 검증 ((a): (28.5,7), (b): (2,2.5), (c): (12.5,22.5))
황을 보여준다. 이 때 작업 구역의 크기는 30m x 30m로 동일하며 3개의 장애물이 같은 위치에 존재할 경우를 기준으로 한다. 이로부터 초기 위치가 어디든 로봇은 작업 구역을 골고루 유랑하게 된다는 것을 알 수 있다.
4.2 장애물 개수 변화
본 장에서는 작업 구역 내의 장애물 개수가 결과에 어떤 영향을 미치는지 알아본다. 그림 11은 이전과 똑 같은 작업 구역 30m x 30m에서 장애물의 개수를 3, 5, 7 개로 변화시켰을 때의 결과를 보여준다. 장애물은 사각 형 기반의 다양한 형태를 지니고 초기 위치도 무작위로 선택된다. 그 결과 장애물의 개수가 증가할수록 로봇이
(a)
(b)
(c)
그림 11. 장애물 개수 변화에 따른 ELA의 성능 검증 ((a): 3개, (b): 5개, (c): 7개)
골고루 유랑하는 것을 알 수 있었다. 이는 장애물이 많 을수록 ELA의 구동 횟수가 많아지기 때문이다.
4.3 작업 구역 크기 변화
본 장에서는 작업 구역의 크기가 ELA의 성능과 어떠 한 관련이 있는지 살펴본다. 이는 ELA가 협소한 구역 부터 넓은 구역까지 모두 아우를 수 있는지의 여부를 확인하기 위함이다. 그림 12는 각각 10m x 10m, 30m x 30m, 50m x 50m의 작업 구역에 대한 5개의 장애물 회피 결과이다. 이로부터 VSTR은 ELA를 기반으로 주행할 때 작업 구역 크기에 영향을 받지 않고 동일한 성능으 로 안전하게 장애물을 회피함을 알 수 있다.
(a)
(b)
(c)
그림 12. 작업 구역 크기 변화에 따른 ELA의 성능 검증 ((a): 10m x 10m, (b): 30m x 30m, (c): 50m x 50m)
5. 결 론
본 논문에서는 구조로봇의 자율주행이라는 큰 목표 아래 Testbed로 고려하고 있는 트랙형 주행로봇 VSTR 을 위한 장애물 회피 기법 ELA를 소개하였다. ELA는 VSTR의 회전 시 요구되는 조향각을 최소화한다는 원칙 하에 작업 구역을 골고루 유랑할 수 있는 요소를 삽입 하여 다양한 환경에서도 강건한 결과를 보일 수 있는 장애물 회피 기법이다. ELA의 성능 검증을 위해 실시한 모의실험에서는 시스템 외부의 다양한 변인에 대해서도 로봇이 안정적인 성능을 보이며 장애물을 회피함을 알 수 있었고, 이로써 구조작업에의 응용에 무리가 없음을 확인하였다. 향후에는 VSTR의 자율적인 장애물 극복
기능과 함께 ELA 기반의 자율적인 장애물 회피 기능을 연동하여 국소 지역에서의 자율주행을 실험적으로 확인 하는 과정이 수반되어야 할 것이다.
[1] Z. Wang and H. Gu, “A Review of Locomotion Mecha- nisms of Urban Search and Rescue Robot”, Industrial Robot: An International Journal, vol. 34, no. 5, pp. 400-411, 2007
[2] 최근하, “장애물 탐지에 의한 가변 트랙형 주행로봇의 주행모드 제어”, 한국과학기술원 석사학위논문, pp.
65-80, 2007
[3] J. Borenstein and Y. Koren, “Real-time Obstacle Avoidance for Fast Mobile Robots”, IEEE Transactions on Systems, Man and Cybernetics, vol. 19, no. 5, pp. 1179- 1187, 1989
[4] J. Borenstein and Y. Koren, “The Vector Field Histogram – Fast Obstacle Avoidance for Mobile Robots”, IEEE Journal of Robotics and Automation, vol. 7, no. 3, pp. 278-288, 1991
[5] D. Fox, W. Burgard and S. Thrun, “The Dynamic Window Approach to Collision Avoidance”, IEEE Robotics &
Automation Magazine, vol. 4, no. 1, pp. 23-33, 1997 [6] J. Minguez, “Nearness Diagram (ND) Navigation:
Collision Avoidance in Troublesome Scenarios”, IEEE Transactions on Robotics and Automation, vol. 20, no. 1, pp. 45-59, 2004
[7] I. Ulrich and J. Borenstein, “VFH*: Local Obstacle Avoi- dance with Look-Ahead Verification”, Proceedings of the 2000 IEEE International Conference on Robotics and Automation, vol. 3, pp. 2505-2511
[8] I. Ulrich and J. Borenstein, “VFH+: Reliable Obstacle Avoidance for Fast Mobile Robots”, Proceedings of the 1998 IEEE International Conference on Robotics and Automation, vol. 2, pp. 1572-1577
곽 윤 근
1974 서울대학교 기계공학과(공학사)
1978 The Univ. of Colorado at Boulder(공학석사) 1981 The Univ. of Texas at
Austin(공학박사) 1985~현재 한국과학기술원 기계항공시스템학부 교수 관심분야 : 주행로봇, 감성로봇
관심분야 : 로봇 메커니즘 설계 및 제어
현 경 학
2003 부산대학교 기계공학부(공학사)
2003~현재 한국과학기술원 기 계항공시스템학부 기계 공학전공 박사과정 관심분야 : 감성로봇을 위한 음성 기반 감정 인식
공학전공 박사과정
관심분야 : 주행로봇의 장애물 극복 및 회피