가설 트롤리선의 위치 / 장력 혼합제어
홍 정 표†
(원고접수일:2009년 4월 7일, 원고수정일:2009년 6월 5일, 심사완료일:2009년 6월 25일)
Hybrid Control of Position/Tension for a Stringing Troy Wire
Jeng-Pyo Hong†
Abstract:As a stringing troy wire is installed by manual operation, it is necessary to scheme the automatic system for stringing troy wire. To accomplish a task of this kind, in this paper an approach to designing controllers for the hybrid Position/Tension control of a stringing troy wire is presented.
Position control system is designed based on equation of dc motor and motion equation of robot, it is controlled by feedback with a detected speed dc motor. Tension control system is designed based on equation of ac servomotor for generating torque and dynamic equation of a troy wire, it is controled by feedback with a detected tension.
The control parameters is determined by simulation in independence operation of each system.
To suppress a mutual interference that the disturbance occur in operating of two task at same time. Dynamic hybrid control is proposed by feed forward compensator with a disturbance accelerator and a step torque at start. The operation of proposed system is simulated and experimented, results is verified the utilities.
Key words:a stringing troy wire(트로이선), The hybrid Position/Tension/control(위치장력 혼합제어)
†교신저자(동의 과학대학 전기공학과), E-mail [email protected], Tel: 011-880-6481
기호설명
: 전류 피드백 계수
: 전류 피드백 이득
: 토크 정수
: 유기전압 정수
: 합성 관성 모멘트
: 구동륜의 반경
: 기어의 감속비
x : 고정점에서 차대의 이동거리
: 로봇 주행속도
: 와이어 장력
: 치차비
: 장력발생 구동 휠 반경
: 장력발생부 관성 모우먼트
: 와이어의 길이
: 장력발생 전동기의 토크
: 영계수
: 케이블 단면적
: 구동 휠의 동마찰력
: 동마찰 정수
: 와이어 풀림속도
: 피드포워드 량
: 가속도 피드포워드 계수
: 차대 가속도
: 전동기 출력 토크 스텝
: 이동 시작 때 토크 스텝 피드포워드 계수
: 이동 변위
1. 서 론
최근, 인간에 위험한 작업이나 인간의 출입이 불 가능한 장소에서의 작업은 로봇이 대신 작업을 행 하여 인간이 위험에 노출되지 않기를 희망한다. 그 러나 인간이 하는 모든 작업을 로봇이 하도록 하는 것은 많은 문제점이 있기 때문에 현재에는 한정된 장소에서만 작업로봇이 활약하고 있다.
복합작업은 혼합(hybrid)제어에 의해 2-3개 작 업의 복합화 연구가 행하여지고 있지만 인간을 대 신할 정도의 성능을 갖는 제어방식은 아직 확립되 지 않은 것이 현재상황이다[1, 2].
전차 트롤리선, 송전선 및 광케이블 등의 가설작 업은 산업 현장에서 필요한 작업이고 일반적으로 윈치 크레인에 의해 수동으로 운전자의 경험적 지 식에 의해 작업이 행해지고 있다. 이러한 작업에서 주된 목적은 드럼에서 와이어 케이블이 풀리는 동 안 장력이 일정히 유지되도록 제어하는 것이다. 이 러한 가설작업을 자동화하기 위해서는 장력유지와 이동의 두 작업이 필요하다. 전차 트롤리선(이하 와이어 케이블이라 함) 가설 작업에서 장력제어만 하는 단일 작업의 연구는 있지만 장력의 세기도 제 어하는 혼합제어는 매우 어려울 뿐만 아니라 이에 대한 연구는 아직 행해지지 않고 있다[3].
일반적으로 와이어 케이블 등을 가설할 때는 2개 이상의 복합작업을 하여야하고 이 동작은 협조제어 가 필요하다. 또한 와이어 케이블 가설을 위한 작 업로봇은 2차륜에 의한 1차원의 이동과 가설 와이 어 케이블의 장력제어를 동시에 행할 필요가 있다.
장력/이동을 동시에 제어하는 작업로봇은 전차 트 롤리선의 교체작업이나 가설에 매우 유용하게 사용 될 것이다.
로봇에 의해 2개 이상의 복합작업을 할 때 서로 간섭이 생긴다. 간섭을 억제하는 제어에 관한 연구 는 위치/힘의 제어[1], 힘/자세 제어[2] 등에서 연구 되고 있다. 그러나 가설되는 와이어의 장력은 그 세 기가 비선형이기 때문에 제어가 복잡하여 단독 제어 대상으로 연구되고 있지만[3] 장력제어와 다른 작업 을 복합한 연구는 아직 행하여지지 않고 있다.
본 연구의 목적은 현재 수동으로 가설되고 트롤 리선 가설작업을 자동화하고 장력/이동의 두 작업 에서 발생하는 간섭이 억제되는 트롤리선 가설 장 치의 개발이다.
본 논문은 트롤리선 가설작업을 위한 위치/장력 제어 시스템의 구성을 나타내고 가설 트롤리선의 장력일정 유지와 이동의 비간섭 혼합제어 방법을 나타낸다. 이동용 DC 전동기 방정식과 이동에 관 한 운동방정식에서 위치제어 시스템이 구성되고 토 크 발생용 AC 서보전동기와 와이어 케이블의 운동 방정식에서 장력제어 시스템 구성을 나타내었다.
위치제어는 직류 전동기 속도 피드백에 의하고 장 력제어는 장력 피드백으로 행한다. 이동과 장력제 어 시스템은 독립된 동작의 시뮬레이션에 의해 제 어요소 파라미터가 결정되었다.
혼합제어는 이동과 장력제어의 두 작업을 동시에 행할 때 발생하는 외란의 상호 간섭을 억제하기 위 해서 가속도 및 이동 시작점의 스텝토크를 피드포 워드에 의해 소멸시키고 마치 제어장치가 단독으로 동작하는 것처럼 비간섭 제어한다. 제안한 비간섭 혼합제어 방법이 시뮬레이션과 실험을 통해 고찰하 고 그 유용성을 나타내었다. 실제 산업사회에 응용 분야는 전차 트롤리선의 가설과 교체 작업 및 광케 이블의 가설 등에 적합하다.
2. 작업로봇
작업로봇은 이동시스템과 장력제어 시스템으로 구성되고 동작은 2차원의 이동이 가능하고 이동 중 에 와이어를 일정 장력(등 장력)으로 당기는 작업 이다. 이동시스템은 알루미늄 프레임으로 된 높이 약 70cm의 차대(Body)이고 이동방법은 차륜을 사용하고 좌우에 구동륜이 2개, 전후에 방향을 자 유로 변하게 할 수 있는 보조륜이 2개가 있다. DC 전동기 축에는 감속기(20:1)가 직결되어 있고 구 동륜의 동력 전달장치는 체인을 사용한다. 로봇 최 대 속도는 1[m/sec] 이고 최대 가속도는
sec이다.
장력제어 시스템의 장력발생은 교류서보전동기 를 사용하고 이것의 출력토크는 구동 활차에 구동 토크를 발생한다. 장력 검출은 로드셀(load cell) 로 하고 장력발생 전동기의 토크는 30:1의 감속기 를 통하여 구동 휠에 전달되며 와이어 인출 최고 속도는 로 한다.
2.1 이동제어 시스템 모델
작업로봇 주행은 DC 전동기의 속도제어에 의해 목적의 위치에 이동한다. 전동기 자신의 속응성과 정상특성을 개선하기 위해 전류를 검출하고 배 하여 피드백 한다. 이 경우 주행 전동기 전달함수 는 식 (1)이다.
(1)
로봇 이동거리는 식 (2)이다.
lim (2)
속도제어는 입력한 속도 지령에 추종하도록 속도 피드백하고 토크 외란에 의한 영향을 억제하고 목 적거리에 이동하기 위해 PI제어한다. 이 때 전동 기 입력 전압은 식 (3)이다
∙
(3)
2.2 장력제어 시스템 모델
장력발생 교류 서보전동기는 HA-FH23이고 입 력을 전압[V]로 하고 출력을 토크[ kgf] 로 하여 측정한 주파수 특성에서 식 (4)와 같이 모델링 된다.
G( s) = 0.4e- 0.002s 1 + ( 1/350 )s
1 + ( 1/90) s (4) 토크제어기에 의한 전동기 발생토크는 지령전압 에 직접 비례하고 비례정수C1= 7.16[kgf /V] 이 다. 와이어는 드럼에서 vw속도로 풀리면서 일정 장력으로 당겨지고 길이와 무게 중심이 변해도 모 양은 변화지 않고 수하특성이 없는 것으로 가정한 다. 와이어 운동 방정식은 탄성한계 내에서 당길 때 발생하는 외형 응력은 훅 법칙에서 식 (5)이다.
TW= ( x - l )
l ES (5)
장력은 식 (5)에서 식 (6)가 된다.
(6)
장력은 로봇 주행속도에 직접 관계하고 그 영향 이 와이어 길이에 따라 변화는 것을 알 수 있다.
장력계의 운동 방정식은 식 (7), 식 (8)이 된다.
(7)
≧ (8)
2.3 간섭억제 제어
장력은 와이어의 이동 시작 때 길이와 와이어의 신장을 포함한 실장에 의해 크게 변화고 비선형이 다. 때문에 로봇을 혼합제어 할 때 이동과 장력이 서로 비간섭 제어기구로 하기 위해 피드포워드 형 2자유도 제어방식을 제안한다.
식 (5)을l, x 의 관계식으로 변형하고 양변을 2
회 미분하면 식 (9)이다.
(9)
식 (9)에서 차대의 가속도와 와이어 장력이 선형 관계로 되기 위해서는 토크지령에 피드포워드 할 량은 차대의 가속도에 가속도 피드포워드 계수를 곱해야 됨을 알 수 있다(식 (10)의 1항). 또 차대 의 이동 초기 장력계에 미치는 영향을 제거하기 위 해서 이동지령을 내고 나서 차대가 동작 할 때까지 응답의 지연이 있기 때문에 출발 시점의 스텝토크 피드포워드 한다(식 (10)의 1항). 따라서 비간섭 화 제어시스템을 구축하기 위한 피드포워드 보상은 식 (10)이다.
∙ ∙ (10)
3. 혼합 제어 시스템 구성
3.1 위치/장력 혼합제어
Fig. 1은 앞에서 유도한 위치제어 시스템과 장 력제어 시스템에 기초하여 구성한 트롤리선 가설 혼합제어 블록선도이다. 이동제어 시스템은 식 (1), 식 (2) 및 식 (3)에 의해 구성한다.
Fig. 1 The proposed hybrid tension/mobile control for stringing troy wire.
장력제어 시스템은 서보 전동기 모델 식 (4), 와 이어 운동방정식 식 (5), 식 (7) 및 식 (8)으로 구 성되고 장력 측정은 로드셀에 동활차를 연결하여 측정한다. 비간섭 제어는 식 (10)에 의해 구성한
다. 장력제어는 장력을 측정하여 지령치와 비교한 오차에서 제어출력을 구하고 속응성과 정상특성을 개선하기 위해서 PID 제어한다.
3.2 시뮬레이션과 실험
그림 2에 모델링한 각 부분 운동방정식의 프로그 램은 C++에 의해 작성하고 블록마다 목적파일을 모아서 이후 추가 작성에 유연하게 대응할 수 있도 록 한다. 이동 시스템의 속도제어는 PI 제어하고 파라미터는 DC 전동기 스텝응답이 20% 오버슛 조건을 갖고 속응성과 정상특성이 양호한 ,
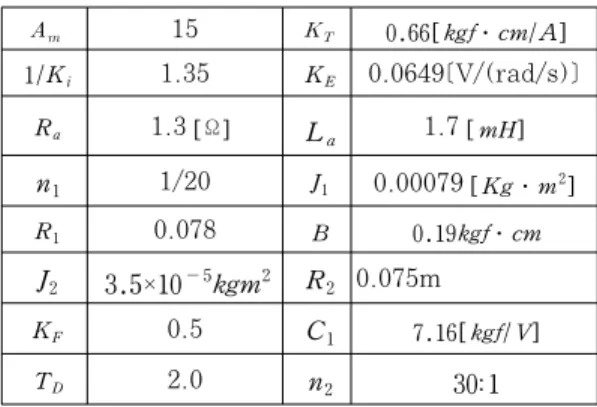
은 채택한다. 장력제어는 PID제어하고 파 라미터는 이동용 DC전동기가 오버슛이 생기지 않 는 조건에서 , 및 을 채 택한다. 그리고 목표장력은 T*W= 6kgf이고 운전 조건은 와이어 풀린 길이 l = 1.2m, l = 0.4m에 서 시작한다. Table 1은 이동 시스템과 와이어 케 이블의 장력시스템의 파라미터 정수이다.
Table 1 Parameters of mobile system.
15 0.66[ kgf⋅cm/A]
1/Ki 1.35 KE 0.0649[V/(rad/s)]
Ra 1.3[ Ω ] La 1.7[ mH ]
n1 1/20 J1 0.00079[ Kg ⋅m2]
R1 0.078 B 0.19kgf⋅cm
J2 3.5×10- 5kgm2 R2 0.075m
KF 0.5 C1 7.16[ kgf/V]
TD 2.0 n2 30:1
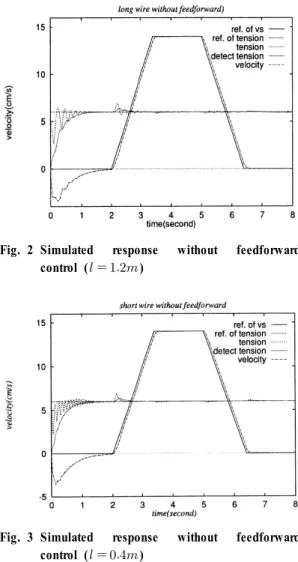
Fig. 2, 3은 이동조건 l = 1.2m, l = 0.4m일 때 간섭억제를 위한 피드포워드는 하지 않고 혼합 제어 한 경우이고 모든 파라미터는 표1, 표2의 것 을 사용한다. 그래프는 위에서 차례로 속도 지령 치, 차대의 속도, 장력 지령치, 실제의 장력 및 로 드셀을 통한 검출 토크를 나타낸다. 이결과 장력 응답은 차대 이동 시작점에서 오버슛이 발생함을 알 수 있다.
Fig. 2 Simulated response without feedforward control ( )
Fig. 3 Simulated response without feedforward control ( )
Fig. 4 Simulated response with feedforward control ( )
Fig. 5 Simulated response with feedforward control ( )
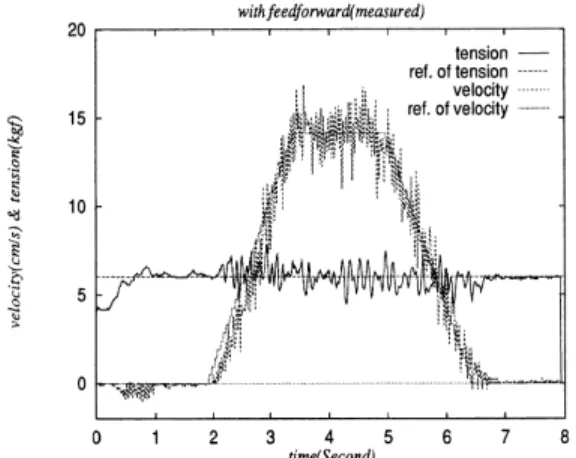
Fig. 4, 5 피드포워드를 한 혼합제어 응답을 나 타낸다. 피드포워드 량은 시뮬레이션에 의한 시행 착오의 결과 정상오차를 1%이하까지 억제 가능한
, 로 결정하였다. 이것은
은 기준으로 한 것이다. 그래프는 위에서 차례로 속도 지령치, 장력 지령치, 실제의 장력, 로드셀 (Load cell)을 통과한 검출 토크, 차대의 속도를 나타낸다. 이결과 장력응답은 피드포워드를 하지 않은 것 보다 차대 이동 시작점에서 오버슛이 감소 함을 알 수 있다.
Fig. 6과 7은 l = 1.2m 일 때 피드포워드 없이 실험 한 것과 피드포워드 있는 혼합제어 하였을 때 실험한 시스템 응답이며 위에서 대차 속도측정치,
Fig. 6 Experimental response without feedforward control ( )
기준속도, 장력측정치 및 목표장력을 나타낸다. 시 뮬레이션 응답과 같이 장력응답은 차대 이동 시작 점에서 오버슛이 발생함을 알 수 있다.
Fig. 7 Experimental response with feedforward control ( )
Fig. 8, 9는 l = 0.4m로 하여 피드포워드 없이 혼합제어 한 것과 피드포워드 있는 혼합제어 하였 을 때 응답으로 장력측정치, 기준 목표장력, 대차 속도 측정치 및 기준 속도를 나타낸다.
여기서 제어 파라미터는 을 기준으로 했기 때문에 는 가 3배로 되어 식 (5)에 서 알 수 있는 것과 같이 장력 TW의 강도도 3배 로 된다. 이 때문에 의 경우는 파라미터 가 최적으로 되지 않아 응답에 진동이 생기고 있는 것을 알 수 있다.
Fig. 8 Experimental response without feedforward control ( )
Fig. 9 Experimental response with feedforward control ( )
이상 실험 결과에서 피드포워드 없을 때 로봇 이 동 시작점에서 장력응답은 큰 오버슛을 나타낸다.
그러나 피드포워드 있을 때는 로봇 이동 시작점에 서 오버슛이 소멸되는 것을 볼 수 있다. 이상에서 시뮬레이션 응답과 실험응답은 일치하고 피드포워 드의 효과가 입증되었고 제안한 로봇 시스템의 유 용성이 검증되었다.
4. 결 론
본 논문은 가선 케이블의 장력제어 모델과 로봇 차대의 이동제어 모델에 기초하여 전차 트롤리선 가설 작업 로봇의 구성을 나타내고 가선 와이어에 대하여 장력일정 유지와 이동의 혼합제어 방법을 제안하였다. 이동용 DC 전동기의 토크 방정식과 이동에 관한 운동방정식에서 이동시스템이 구성되 고 토크 발생용 AC 서보전동기와 와이어 케이블의 운동 방정식에서 장력제어 시스템의 구성을 나타내 었다. 그리고 피드포워드의 도입으로 위치/장력에 관한 혼합제어에서 간섭억제를 나타내었다. 시뮬레 이션과 실험을 통하여 그 유용성이 검토되었다.
Reference
[1] Di Xiao, Bijoy K. Ghosh, Ning Xi, and T. J. Tarn, “Sensor-based hybrid
position/force control of a robot manipulator in an uncalibrated environment.” IEEE Transactions on Control Systems Technology, Vol. 8, No. 4, pp. 635-645, July 2000.
[2] Luigi Villani, Ciro Natale, Bruno Siciliano and Carlos Canudas de Wit,
“An experimental study of adaptive force/position control algorithms for an industrial robot,” IEEE Transactions on Control Systems Technology, Vol. 8, No. 5, pp. 777-786, September 2000.
[3] Hakan Koc, Dominique Knittel, Michel de Mathelin, and Gabriel Abba,
“Modeling and robust control of winding systems for elastic webs,” IEEE Transactions on Control Systems Technology, Vol. 10, No. 2, pp.
197-208, March 2002.
[4] Randolph Cabell, Dan Palumbo, and Jeffrey Vipperman “A principal component feedforward algorithm for active noise control: Flight test results,” IEEE Transactions on Control Systems Technology, Vol. 9, No. 1, pp.
76-83, January 2001.
[5] Mehrzad Namvar and Farhad Aghili,
“Adaptive force-motion control of coordinated robots interacting with geometrically unknown environments,”
IEEE Transactions on Robotics, Vol.
21. No. 4, pp. 678-694, August 2007.
저 자 소 개
홍정표 (洪正杓)
2008년 현 동의과학대학 전임강사, 부 경대학교 기계공학부 박사, 1998년 부 경대학교 전기공학과 졸, 2001 부산대 학교 대학원 공학석사, 관심분야: 퍼지 시스템설계, 전동기 벡터제어, 리럭턴스 전동기 제어설계.