http://dx.doi.org/10.5369/JSST.2017.26.6.432 pISSN 1225-5475/eISSN 2093-7563
자동차 조향장치용 TAS module을 위한 Multi-track Encoder기반 신호처리보드의 구현
우승탁
1,+
· 한춘수2
· 백준병2
· 이상훈1
· 정민우1
· 추성중1
· 박재률1
· 유종호1
· 정상훈1
· 김주영1
Preliminary study of Angle sensor module for Vehicle Steering System Based on Multi-track Encoder
Seong Tak Woo
1,+
, Chun Soo Han2
, Jun Byung Baek2
,Sang-hoon Lee1
, Min Woo Jung1
, Sung Joong Choo1
, Jae Roul Park1
, Jong-Ho Yoo1
, Sanghun Jung1
, and Ju Young Kim1
Abstract
As 4.0 industry has been developed, research on a self-driving car technology and related parts of an automobile has been highly investigated recently. Particularly, a TAS(Torque Angle Sensor) module on steering wheel system has been considered as a key tech- nology because of its precise angle, torque detection and high speed signal processing. The environmental assessment is generally required on the TAS module to examine high resolution of angle/torque detection. In the case of existing TAS module, angle detection errors has been occurred by back-lash on main and sub gear in addition to complicated structure caused by gears. In this paper, a struc- ture of the TAS module, which minimizes the numbers of components and angle detection errors on the module compared with the existing TAS module, for vehicle steering system based on a Multi-track Encoder has been proposed. Also, angle detection signal pro- cessing board, and key technology of the TAS module were fabricated and evaluated. As a result of the experiments, we confirmed an excellent performance of the fabricated signal processing board for angle detection and an applicability of the fabricated angle detection board on the TAS module of vehicles by the environmental assessment an automobile standard.
Keywords: EPSS, TAS module, Multi-Track Encoder, Self-driving Car, Steering angle sensor
1. 연구배경
최근 자율주행 자동차 기술의 발전과 함께 LiDAR, ECU 및 첨단 조향제어 장치 등 관련 부품의 선진화 연구가 지속 적으로 수행되고 있다[1-11]. 특히, 자동차내 수반되는 조향 장치는 자동차의 안정성과 성능을 좌우하는 핵심 부품으로써 , 정확한 각도 검출 및 빠른 데이터 처리를 통해 자동차의 진 행방향과 회전각도를 적시에 제어하는 중요한 역할을 수행하 고 있다[12-16].
더욱이, 운전의 편의성과 안정성을 향상시키는 전자제어 조향 장치(EPSS:Electric Power Steering System)의 구성품인 TAS (Torque Angle Sensor) module 은 스티어링 휠 하단부에 장착되 어 조향 속도, 방향, 각도를 측정하는 SAS(Steering Angle Sensor) 와 조향축에 걸리는 토크를 측정하는 STS(Steering Torque Sensor) 를 통합한 지능형 자동차용 센서모듈로써 이에 대한 관심이 증 가하고 있는 추세이다[15].
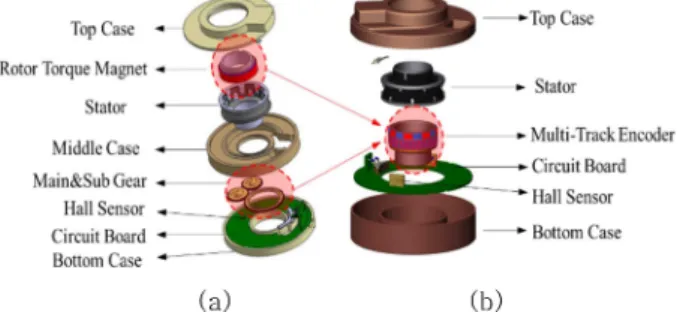
본 논문에서는 기존의 TAS module 보다 각도검출 분해능이 우수하며 구조의 단순화를 통해 모듈의 다운 사이징이 가능한 Multi-Track Encoder(MTE) 기반 TAS module의 구조를 제안하 고, 핵심요소기술중 하나인 고 분해능의 각도검출 신호처리모듈 을 구현하여 평가하였다. 제안한 구조의 TAS module 및 기존 제품의 개념도는 Fig. 1과 같다. 제안한 TAS module은 MTE를 적용, 자기식 비접촉 센싱을 통해 조향각도 및 토크를 직접 검 출함으로써 검출부 및 모듈의 소형화가 가능하며, 고 분해능의 자기검출용 디지털 홀센서를 이용하여 기존 제품 보다 우수한 각도 분해능을 가진다.
Fig. 1 과 같이 기존 TAS module은 메인 및 서브 기어가 회전 할 때의 기어 비를 통해 각도검출 및 연산을 수행하게 되며, 이 때 기어가 맞물리면서 발생하는 Back-lash에 의해 각도검출오차
1경북 IT 융합산업기술원 (Gyeongbuk Institute of IT Convergence Industry Technology)
25, Gongdan 9-ro 12-gil, Jillyang-eup, Gyeongsan-si, Gyeongsangbuk-do 38463, Korea
2한국 SKF 씰㈜ (SKF Sealing Solutions Korea Co., Ltd.)
40, Nongongjungang-ro 45-gil, Nongong-eup, Dalseong-gun, Daegu, Korea
+Corresponding author: [email protected]
(Received: Oct. 26, 2017, Revised: Nov. 27, 2017, Accepted: Nov. 28, 2017)
This is an Open Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License(http://creativecommons.org/
licenses/bync/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
가 발생하는 단점이 있다[16]. 이러한 단점을 극복하기 위해 제 안한 구조의 TAS module은 MTE를 통해 기어 없이 비접촉 방 식으로 홀센서를 통해 회전에 따른 각도 및 토크 검출이 가능 하다. 이에 따라 제안된 TAS module구조는 gear가 없어 back- lash 가 발생하지 않으며, 또한 비접촉 방식을 통해 고속회전시 에도 MTE로부터 각도 검출이 가능하다. 일반적으로 기존 조향 장치모듈은 gear회전으로 인해 2000~3000°/sec의 검출속도 한 계가 따르지만 본 논문에서 제안하는 TAS module 구조는 속도 의 영향을 받지 않는 장점이 있다[17]. 본 논문에서는 제안한 구 조의 TAS module의 실현을 위해 핵심 요소기술인 MTE와 디 지털 홀센서가 내장된 신호처리모듈을 구현하여 각도검출특성 을 분석하였으며 평가를 통해 기존 제품 대비 우수한 성능을 확 인하였다.
2. 요소기술의 구현
2.1 Multi-track Encoder 설계
각도 검출에 있어 가장 중요한 요소부품중 하나인 Multi-track Encoder 의 경우 회전에 따른 균잃한 자계의 형성이 중요하다.
본 논문에서는 높은 자계특성 및 최적화된 규격을 가지는 MTE 설계를 위해 유한요소해석 프로그램(Flux, CEDRAT) 을 이용하 여 track간격 및 재질에 따른 특성을 분석하였다. 각도 검출용 2-track 과 토크 검출용 track을 각각 32pole, 31pole, 그리고 16pole 로 설계하였으며, 토크 및 각도 track간 1 ~ 3mm 간격을 변경 함으로써 특성을 분석하였다. 해석을 위해 설계된 Multi-track Encoder 구조는 Fig. 2와 같으며, 결과는 Table 1과 같다. 해석을
위해 사용된 Encoder magnet의 재질은 Ferrite로 하였으며, 두 Angle track 중심에서 수직으로 1 mm 떨어진 점에서 Torque track과의 간격에 따라 변화되는 자계를 측정하였다. Table 1의 결과를 통해 간격에 따라 최대 6 Gauss 의 차이를 보였으며, 이 는 디지털 홀센서의 최저 입력 감도 188Gauss를 고려하면 큰 영향을 미치지 않는 수준이다. 다만, Torque track과 Angle track 간 간격이 1 ~ 2mm 이내로 좁으면 극성의 방향에 따라 형성된 자계가 서로 쇄교하여 상쇄될 수 있는 문제가 있다. 따라서, 본 논문에서는 Torque 및 Angle track 간의 간격을 유한요소해석 을 통해 검증된 거리인 3 mm로 하여 Multi-track Encoder를 제 작하였다. 제작된 Multi-track Encoder의 사진은 Fig. 3과 같다.
유한요소해석에서 적용된 Ferrite(89.7%), NBR계열 고무 (10%), SUS304(0.03%) 를 이용하여 제작하였으며, 외경 49 mm, 내경 45 mm. 높이 20 mm로 제작되었다. MTE의 외형 바인더 역할을 하는 NBR계열의 고무를 첨가함으로써 Ferrite 의 소결 상태 및 제작 용이성을 극대화 하였으며, SUS304를 첨가하여 내식성 및 내산화성을 최적화 하였다. 시뮬레이션 결 과를 바탕으로 제작된 MTE의 angle track 중심(공극:1 mm) 에서 자력은 평균 260 Gauss로 Table 1의 시뮬레이션 결과보 다 약 30 Gauss 낮게 측정되었으나 이는 디지털 홀센서의 입 력 감도보다 약 70 Gauss 높은 수준으로 MTE 회전에 따른 데이터 검출은 문제가 되지 않는다.
2.2 각도 검출 연산 기술
일반적으로 자동차용 조향장치내 TAS module은 장치내 메 인 및 서브기어의 비에 따라 출력된 신호를 Arctan 연산을 통 해 절대위치를 검출하게 된다. 이러한 연산은 신호처리 구현 Fig. 1. (a) Conventional torque angle sensor and (b) proposed torque
angle sensor based on multi-track encoder schematic.
Table 1. Magnetic flux of MTE according to distance of between angle and torque track.
Distance [mm]
Magnetic flux [Gauss]
1 295.8
2 292.9
3 289.8
Fig. 3. Picture of fabricated the Multi-track encoder.
Fig. 2. Design of finite-element analysis for Multi-track encoder.
방법이 비교적 간소하고 이를 통해 프로세서 연산시간이 짧은 장점을 가지고 있다[18,19]. Arctan 연산의 기본 수식은 아래 와 같다.
if (1)
if (2)
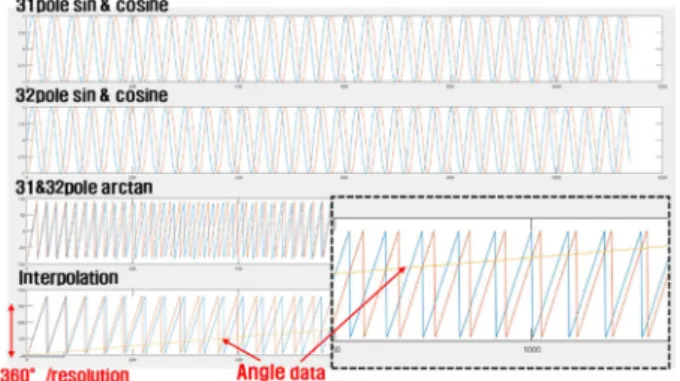
수식(1), (2)에서 A와B는 각각 pole pair된 MTE를 통해 측정 된 sine, cosine신호이다. 본 논문에서는 수식(1), (2)에 기반하여 31, 32pole pair 로 설계된 MTE가 360° 회전하였을 때 검출되는 각도 데이터를 MATLAB 프로그램을 이용하여 정성적으로 시 뮬레이션 하였으며, 그 결과는 Fig. 4와 같다.
sine 신호가 양수 또는 음수에 따라 연산되는 각도 데이터는 아래의 Fig. 4의 세번째 그래프와 같이 삼각 톱니파형을 따른 다. 31, 32pole pair로부터 측정 및 연산된 각 데이터들의 차를 통해 Fig. 4의 마지막 그래프처럼 y축의 각도 데이터(yellow line) 가 도출된다.
2.3 각도검출모듈 구현
MTE pole pair 의 law data를 통해 시뮬레이션된 각도 값의 실 제 검증을 위해 각도검출모듈을 제작하였으며, 홀센서가 실장되
는 센서부와 신호처리IC가 실장되는 신호처리부를 각각 구현하 였다. 구현된 각각의 보드는 Fig. 5 (a), (b)와 같다.
센서부의 디지털 홀센서(IC-MU, IC-haus)를 통해 MTE의 회전에 따른 magnetic flux를 측정하게 되며, 내부에 실장된 Arctan 연산 프로토콜을 통해 변환된 Angle binary data는 신호처리부 MCU(ATmega328, Atmel)에 전송되어 연산됨으 로써 각도값으로 도출된다. 디지털 홀센서는 15bit의 분해능 으로 설정되었으며, 이는 약 0.01°의 각도 분해능을 가진다.
자동차 조향 장치 모듈에 직접 적용하기 위해서는 신호처리 보드의 규격 및 디자인이 추가적으로 고려되어야 하지만 본 논문에서는 실험의 편의를 위해 홀센서 및 신호처리보드로 각각 구현하였다.
2.4 시험환경
본 논문에서는 구현된 각도검출모듈의 정량적 평가를 위해 테 스트베드를 제작하여 평가하였으며, 제작된 테스트베드는 Fig.
6과 같다.
일반적으로 기존 자동차 조향장치모듈들은 0.1~0.2°의 각도 분해능을 가진다[13,14,17]. 본 논문에서 구현된 각도검출모듈은 최대 0.01°의 각도 분해능을 가지며 구현된 모듈을 평가하기 위 해 최대 0.05°급의 분해능을 가지는 스텝모터 및 엔코터를 통해 테스트 베드를 제작하여 검증하였다. 10°간격 범위로 모터를 구 동하여 엔코더 및 제작된 각도검출모듈로부터 측정되는 각도 데 φ deg [ ] 1 90 o B
A ----
⎝ ⎠ ⎛ ⎞
1 –
tan +
= A 0 ≥
φ deg [ ] 2 270 o B A ----
⎝ ⎠ ⎛ ⎞
1 –
tan +
= A 0 <
Fig. 4. Result of angle detection simulation based on MATLAB.
Fig. 5. Fabricated angle sensor module; (a) Hall sensing part and (b) signal processing part.
Fig. 6. Fabricated test-bed and Experimental environment picture.
Fig. 7. Experimental environment blockdiagram.
이터를 각각 비교하였다. 각도 검출 모듈의 시험 환경블럭도는 Fig. 7과 같다. 평가에 사용된 스텝모터(A15K-S545, Autonics) 는 0.05°분해능으로 구동되도록 설정하였으며 이를 검증 할 수 있는 기준 각도 검출용 엔코더(E60H-20-8192, Autonics)는 0.044°
의 분해능으로 구동되도록 설정 하였다. PC기반 신호발생 및 수 집장치 및 모터 드라이버(MD5-HF14, Autonics)를 통해 스텝모 터로 PWM신호를 인가하여 구동하였으며, 모터 구동과 함께 설 정된 각도에 따라 샤프트축은 회전하도록 구현하였다. 이때 샤 프트 축에는 기준 각도 검출을 위한 중공형 엔코더와 제작된 MTE, 그리고 MTE와 공극 1 mm의 거리에 구현된 각도검출모 듈의 디지털 홀센서를 위치 시켰다. 그리고 기준 각도 검출용 엔코더와 제작된 각도검출모듈을 통해 샤프트 축의 회전하는 각 도 데이터를 획득 하였다.
3. 시험 결과
3.1 각도 검출의 평가
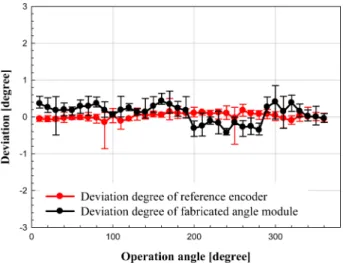
테스트 베드를 통해 평가된 실험결과는 아래의 Fig. 8과 같다.
스텝 모터를 통해 구동된 각도의 검증을 위해 상용 엔코터를 이 용하여 기준 각도를 측정하였으며, 구현된 TAS module용 신호 처리 보드의 측정 데이터와 비교하였다.
Fig. 8 에서 엔코더의 기준 각도 데이터는 0 ~ 360°범위, 10°
간격에서 평균 0.07°의 편차로 측정되었으며, 본 논문에서 구 현한 각도 검출 신호처리보드의 경우 평균 약 0.2°의 편차로 측정 되었다. 이는 상용 엔코더 데이터보다 약 0.13°차이를 보 이지만 현존하는 최고 성능 수준인 TAS module(Bourns社)의 편차 특성 0.5°와 비교하였을 때 6 dB 이상의 개선된 특성을 보인다[17]. 또한, 스텝 모터, 기준 각도 검출용 엔코더 및 구 현된 각도검출 신호처리보드의 샤프트 결합 상태에 따른 영향
을 고려했을 때 구현된 신호처리보드의 각도 검출 성능은 상 용 제품과는 유사한 특성이라 볼 수 있다. 더욱이, 실제 자동 차에 장착가능하도록 신호처리보드의 규격화 및 최적화가 추 가적으로 이루어진다면, 각도 검출 편차는 보다 개선 할 수 있 을 것이다.
3.2 각도검출모듈의 환경 신뢰성 평가
3.2.1 전자파방사 평가
구현된 TAS module용 각도검출보드의 환경 신뢰성 평가를 위해 전자부품 규격 CISPR22 기준에 의거 전자파 방사 시험을 수행하였다. 구현된 각도검출보드의 전자파 방사 시험 환경 및 측정 시료 사진은 Fig. 9 (a), (b)와 같으며, 측정된 시험 결과는 Fig. 10과 같다.
전자파 방사 시험은 공인시험기관의 밀폐된 전자파 차폐실에 서 수행하였으며, 구현된 모듈의 동작에 따라 측정거리 10 m, frequency 30 ~ 230 MHz 구간에서는 40 uV/m, 230 MHz 이상 구간에서는 47 uV/m 방사 기준으로 측정하였다. 시험 결과를 통해 64 MHz에서 약 43 uV/m로 측정되었으나 나머지 전구간 에서는 평균 20 uV/m로 기준을 충족하였다. 64 MHz의 전자파
Fig. 8. Verified result of the proposed angle sensor module by test- bed.
Fig. 9. (a) Electromagnetic Experimental environment and (b) Fab- ricated angle module.
Fig. 10. Electromagnetic experimental result of fabricated angle sen-
sor module.
방사 데이터는 신호처리보드의 clock 생성 주파수 16 MHz의 four-harmonics 영향이며, 이는 저전력 automotive용 crystal IC 적용을 통해 충분히 극복 할 수 있다.
3.2.2. 열충격 시험 평가
또한, TAS module이 자동차내 삽입되었을 때 과열에 따른 특 성 평가를 위해 자동차용 전자기기 환경시험 ES954000-10규격 에 의거하여 공인시험기관을 통해 구현된 각도검출보드의 열충 격 시험을 수행하였으며, 수행된 열충격 시험 환경 및 동작 평 가 사진은 Fig. 11 (a), (b)와 같다. 시험은 -40 ~ +85
oC 의 구간 에서 50 cycle 동안 온도 변화에 따른 각도검출보드의 동작 유 무를 평가하였으며, -40
oC 에서 30 min., +85
oC 에서 30 min., 온 도이동구간 5 min.을 1 cycle로 설정하였다.
시험 평가를 통해 열충격 시험 50 cycle 전·후 각도검출모듈 의 동작을 PC기반 데이터 검출을 통해 확인하였으며, 이를 통 해 구현된 각도검출보드의 자동차 규격에 따른 온도 특성 기준 에 부합됨을 알 수 있다.
4. 결론 및 고찰
본 논문에서는 기존의 main 및 sub gear 기반의 조향장치모 듈보다 구조 및 구성요소가 단순하고 각도검출 분해능이 우수 한 MTE 기반 TAS module의 구조를 제안하였으며, 핵심요소기 술인 고 분해능의 각도검출 신호처리모듈을 구현하여 평가하였 다. 제안된 MTE기반 TAS module 은 기존 상용 제품이 가지는 gear 맞물림에 따른 back-lash문제가 없다는 장점이 있으며, 특 히 실험에 사용된 MTE는 유한요소해석을 통해 Angle/Torque track을 최적화 하였다. 또한, 각도검출 모듈은 디지털 홀센서를 이용 15bit의 약 0.01° 각도 분해능을 가지게 구현되었으며, 이 는 기존 상용 제품들의 0.1~0.2°급 보다 약 20 ~ 26 dB 높은 분 해능을 가진다. 정량적인 평가를 위해 모터 및 엔코더로 구성된 테스트베드를 통해 기존 제품들보다 6 dB높은 0.05°의 각도 분 해능 범위로 구현된 각도검출모듈을 평가하였으며, 실험결과를 통해 구동된 각도 조건에서 각도 검출 편차 약 0.2°의 우수한
성능을 확인하였다. 이는 기존 상용 자동차 조향장치 모듈과 비 교하였을 때 약 6 dB 이상의 수준으로 실험환경 개선 및 보드 최적화가 이루어진다면 좀더 개선될 수 있을 것이다. 또한, 공 인시험기관을 통해 자동차규격에 의거한 전자파 방사 및 열충 격 시험을 수행하여 검증 하였다. 수행된 시험평가를 통해 구현 된 자동차 TAS module용 각도검출모듈이 환경 신뢰성면에서 적합한 특성을 가지는 것을 확인하였다.
본 논문에서 구현 및 평가한 각도검출 신호처리보드는 실험 을 통해 우수한 각도 분해능 및 검출 정확도 성능을 검증하였 다. 하지만 여전히 추가적인 연구 및 검증이 요구된다. 첫째, 기 존 자동차용 조향장치모듈에 필요한 토크검출기능 및 규격의 최 적화가 필요하다. 설계된 MTE의 torque track을 활용한 검출 기 법이 구현되어야 하며, 이를 검출하기 위한 자동차규격의 linear 홀센서 적용이 요구된다. 둘째, AEC-Q100 기준 기반의 Automotive IC 적용을 통해 저전력화 및 자동차 전자부품 세부 규격화 검증 이 요구된다. 앞서 평가된 전자파 방사 실험을 통해 알 수 있듯 이 디지털 홀센서와의 시리얼 통신을 위해 사용되는 crystal IC 의 낮은 전자파 방사 특성이 요구된다. 셋째, 각도 분해능의 경 우 신호처리모듈의 전력소모를 고려한 최적의 범위 선정이 필 요하며 특히, 국내 자동차 기업에서 요구하는 사양을 반영하여 설정될 필요가 있다. 현재 개발 및 양산 되고 있는 TAS module 의 경우 대부분 0.1 ~ 0.2°의 각도 분해능을 가지고 있으며, 이 러한 기술 동향을 고려하였을 때 6 ~ 10 dB내의 범위로 분해 능이 개선될 필요가 있다. 특히, 고 분해능과 동시에 각도 검출 편차를 최소화함으로써 검출 정확도의 성능 향상이 요구된다.
본 논문을 통해 구현된 각도 검출 신호처리보드의 경우 각도 검 출 편차는 약 0.2°로써 상용 제품과 비교하여 동등수준 이상의 성능을 보이지만 시험평가환경개선 및 모듈 최적화를 통해 성 능을 향상 시킬 필요가 있다. 넷째, 제안한 각도검출모듈의 분 해능은 0.01°수준으로 기존 상용 제품에 비해 높은 분해능을 가 지고 있다. 이러한 성능은 실제 자율주행에 따른 조향각 검출 기능보다 자동 주차 시스템과 같은 정밀한 각도 검출이 요구되 는 환경에 적용될 수 있다. 특히, 능동 주차 시스템의 경우 고 정밀의 조향각도 정보가 요구되는데 운전자가 설정한 지점에 주 변 장애물을 감지하여 최적의 조향각도를 연산, 자동차 바퀴의 선회를 최적화 하는데 도움이 될 수 있다[20]. 향후, 제안한 각 도 검출 신호처리 회로기판과 MTE, stator, collector 등의 TAS module 요소부품을 결합하여 실차 적용시 각도 분해능에 따른 연산 처리 속도 및 자동 주차 반경 및 효율에 대한 검증 연구 가 필요하다. 끝으로, 자동차 부품의 경우 열저항성, 전자파 특 성 뿐 아니라 내진동특성 등의 환경 본 논문에서는 구현된 각 도 검출 신호처리보드의 전자파 방사 및 열충격 특성을 통해 전 자회로가 가지는 환경 신뢰성 특성을 분석하였다. 하지만 실제 자동차에 적용될 경우 주행중 발생되는 진등 특성에 대한 내구 특성에 대한 신뢰성 검증이 매우 중요하다. 특히, MTE와 홀센 서 간의 공극변화가 없어야 하며 이를 검증 할 수 있는 내진동 Fig. 11. (a) Themal shock Experimental environment of fabricated
angle sensor module and (b) operating verification.
특성이 요구된다. 따라서, 신호처리보드 및 MTE 외 요소부품들 은 결합하여 내진동 및 복합 진동에 대한 검증 연구가 요구된다.
고 분해능 TAS module의 최종 목적은 급성장하고 있는 자율 주행 자동차 기술에 부합하여 조향 장치 또는 메인 ECU가 최 소의 연산을 통해 목표로 하는 조향각도를 검출하는데 있다. 따 라서, 신호처리IC 또는 모듈의 전력소모특성, 그리고 모듈을 구 성하는 요소 부품의 규격화를 통해 최적의 각도 분해능 선정 연 구가 동반될 필요가 있다. 또한, 자율주행 자동차 기술의 발전 과 더불어 자동차 안전기능규격(ISO26262)에 부합하는 오작동 및 에러 검출이 가능한 지능형 조향 장치 모듈에 대한 개발 필 요성이 요구되고 있으며, 이에 따라 국내·외 자동차 부품업계 및 연구소를 중심으로 반도체 SoC기술, MEMS 기술의 적용으로 대응하고 있다. 본 논문에서 선행연구된 MTE 기반 TAS module 용 신호처리보드를 기반으로하여 모듈의 최적화 및 실차 평가 등의 검증이 추가적으로 수행된다면 다가오는 자율주행 자동차 시대에 대응하여 관련 산업 핵심 요소 기술로써 주목 받을 것 으로 기대된다.
감사의 글
본 연구는 중소벤처기업부 한국산업기술진흥원 월드클래스 300 R&D 사업(S2521249)의 지원을 받아 수행되었습니다.
REFERENCES