동력의지를 위한 BLDCM 구동 시스템 및 상전류 추정 기법
A Brushless DC Motor Drive System and
Phase Current Estimation Method For Active Knee Prothesis
남기준*, 최연범, 정두희 K. J. Nam, Y. B. Choi, D. H. Jung
요 약
본 논문에서는 동력의지를 위한 브러쉬리스 DC 모터 구동 시스템과 DC 링크단의 전류를 이용하여 상전 류를 추정하는 기법을 제안한다. 토크제어를 위해서는 전류 측정이 매우 중요하며 전류 측정 시 스위칭 노 이즈를 최소화하기 위해 전류 센싱 시점은 스위칭 전압 명령에 동기화 되어야 한다. 저가의 시스템, 공간의 절약 그리고 제어의 단순화하기 위해 DC 링크단 전류를 사용한 제어를 실시하였다. 또한 환류 다이오드를 통해 흐르는 전류에서 발생하는 DC 링크단 전류와 상전류간의 오차를 줄이기 위해 Analog MUX를 이용한 상전류 추정방법을 사용하였다. 실험 결과를 통해 제안한 시스템의 유효성을 검증하였다.
ABSTRACT
In this paper, we propose a brushless DC motor drive system for active knee prosthesis and low-cost estimation method for phase current from DC-link current. To control motor torque directly, current sensing is very important and current sensing point should be synchronized with voltage switching command to minimize the effect of switching noise in current measurement, For maintaining small form factor, simplifying control schemes and achieving low-cost system, control schemes using DC-link current are used. Moreover, we incorporated phase current estimation method using analog MUX for minimizing current estimation error between DC-link current and phase current. The validity of the proposed system is verified through experimental works.
Keyword : BLDCM, BLDCM Torque Control, ,DC Link, Analog MUX, RC Filter,
1. 서론
질병이나 사고로 인하여 인체의 기능을 회복 시 켜주기 위한 의족은 기계식이 대부분이다. 기계식 의족의 경우 착용 시 환자의 정상보행은 부드럽지
접 수 일 : 2013.11.20 심사완료일 : 2013.12.10 게재확정일 : 2013.12.20
* 남기준 : 한국산업기술대학교 전자공학과 석사과정 [email protected] (주저자)
최연범 : 한국산업기술대학교 전자공학과 석사과정 [email protected] (공동저자)
정두희 : 한국산업기술대학교 전자공학부 교수 [email protected] (교신저자)
※ 본 연구는 미래창조과학부 및 정보통신산업진흥원의 IT융합 고급인력과정 지원사업의 연구결과로 수행되었음 (NIPA-2013-H0401-13-1006)
못한 편이며 원활한 보행을 위해서는 장기간의 훈 련이 요구된다. 이런 불편함을 개선하기 위하여 각 종 센서를 사용하여 근전도 등의 신호를 기반으로 제어하는 의족에 대한 연구가 활발하게 이뤄지고 있다[1-4].
의족에 사용할 모터는 구동에 필요한 토크 및 속 도 범위를 만족해야 한다. 본 논문에서는 전동의지 구동을 위해 소형화한 브러쉬리스 DC Motor(이하 BLDCM) 구동 시스템을 제안한다. Balogh의 연구 [5]를 이용하여 이를 PWM으로 제어할 소형 MOSFET driver를 설계하고 그 결과를 확인하였다.
토크제어를 위한 전류획득 방법은 상전류 측정과 DC 링크 전류 측정방법이 있다. 시스템의 가격을 낮추고 공간을 줄이기 위해 DC 링크 전류 측정을 택하여 그에 관련한 연구가 이뤄지고 있다[8-9].
본 논문에서는 적용한 DC 링크 전류 제어방식에
대해 설명하고, 모터 제어 IC 및 보호기능, PWM 발생회로와 전체 제어기 블록선도 에 대해 차례로 설명한다. Analog MUX를 이용한 상전류 추정방법 을 제시하고, 이어서 실험 결과를 통해 시스템을 검 증하였다.
2. BLDCM 제어
2.1 BLDCM의 동적방정식 및 제어방식
BLDCM 의 전기적인 동적방정식과 기계적인 동 적방정식은 다음과 같다[6].
(1)
여기서
은 고정자 권선 인덕턴스,
은 고정 자 권선 저항,
는 역기전력 상수,
는 모터의 전기각,
은 역기전력의 형태를 나타내는 전동 기 고유의 함수,
와
는 각각 고정자의 k번째 (k=1,2,3) 상전류 및 상전압,
는 기구부의 등가 회 전관성,
는 기구부의 등가 점성마찰계수,
은 부하토크,
는 전동기에서 발생하는 토크를 나타 낸다.
전동기에서 발생하는 토크
의 식은 다음과 같다.
(2)
수식(2)로부터 임의의 역기전력 형상을 가지는 BLDCM에 대해 토크명령으로부터 전류 명령을 구 할 수 있으며[6] 전류제어가 충분히 빠르게 이루어 진다면 기구제어시스템으로부터 수식(1)의 상단에 표시된 전기적인 동적 방정식을 제거할 수 있다.
본 연구에 사용한 BLDCM의 역기전력 신호 파형 을 홀센서 신호 및 상단 구동 신호 파형과 함께 그 림1에 나타내었다. 본 연구에서는 제어 시스템을 단 순화하기 위하여 3상전류를 직접 제어하는 대신 DC 링크의 전류를 제어하는 방식을 사용하였다. 이러한 제어 방식은 상전류 명령이 계단으로 변화하기 때 문에 전류제어 오차가 불가피하게 발생하고 이로 인해 주기적인 토크 리플이 발생하지만 제어부의
단순함과 기구부 제어 루프에 의한 보상을 통해 전 체 시스템 성능에 문제가 되지 않는 경우 널리 사 용된다.
그림 1. 홀센서 신호(top)와 역기전력 신호 파형 (middle) 및 상단 구동 신호 파형 (bottom)
2.2 모터 제어 IC 및 보호 기능
의족에 사용하는 모터 제어기는 의족이라는 한정 된 공간에 장착되어야 하므로 그 크기를 최소화하 면서 각종 보호기능을 가져야 한다. IPM(Intelligent Power Module)은 이러한 목적으로 전력반도체 소 자와, 제어회로, 구동회로, 보호회로, 제어전원을 단 일 패키지 내에 구성한 것으로써 용도 및 시스템의 요구에 따라서 입출력 전압전류, 제어방식, 형상 및 크기 등이 다양하다[7]. 그러나 가전시장과 같이 대 량 생산이 이루어지는 곳을 주 시장으로 하기 때문 에 본 연구에 적합한 저전압, 고전류 용량의 IPM은 없는 실정이다. 본 연구에서는 대신 전력반도체소자 이외의 부분을 단일 패키지에 구성한 BLDCM 제어 IC인 On semiconductor사의 MC33035를 이용하여 제어 회로를 구성하였다.
MC33035는 기본적으로 3상 MOSFET Bridge을 이용한 BLDCM 구동이 가능하다. 또한, Forward/
Reverse direction, Run enable, Brake 신호를 외부 에서 입력받아 제어하기에 용이하다.
보호 기능으로 Internal Thermal Shutdown, Undervoltage Lockout, Cycle-By-Cycle Current Limiting 기능을 제공하여 고온, 저전압, 과전류로부 터 회로를 보호한다.
2.3 PWM 발생 회로
BLDCM 제어 IC인 MC33035는 속도 제어 기능
을 제공하는데 이러한 속도 제어 기능은 외부의 속 도 명령 입력에 대해 내장된 Error Amplifier를 이 용하여 전압 명령을 생성하고 내부 Oscillator에 의 해 생성된 삼각파와 비교하여 하단 MOSFET에 대 한 PWM 스위칭 명령을 만들어 냄으로써 구현된다.
그러나 의족의 제어를 위해서는 단순한 속도제어 기능 대신 상위제어기에서 직접 전압 명령을 생성 해 주어야 하며 또한 토크 제어를 위해서는 전류 센싱 노이즈를 최소화하기 위해 PWM 스위칭 시점 을 피해 전류 센싱을 해 주어야 한다. 따라서 속도 명령 기준 전압을 조절하여 Full Duty를 만들어 줌 으로써 제어 IC에서 나오는 Full Duty의 하단 구동 신호에 상위제어기에서 만든 PWM 신호를 AND 시켜 하단 브리지 구동 신호를 생성하는 회로를 구 성함으로써 이를 가능하게 하였다.
한편 상위제어기와 MOSFET사이의 배선 및 MOSFET 내부에는 기생용량이 존재하는데 이러한 기생용량과 직렬저항에 의해 스위칭 속도가 느려 지는 문제가 발생하며 제어신호파형의 Ringing 현 상 역시 발생할 수 있다. 이러한 문제를 해결하기 위해 그림2와 그림3과 같이 Bipolar totem-pole driver 및 Turn-off diode를 추가하였다.
그림 2. Bipolar totem-pole
그림 3. turn-off diode
2.4 전체 제어기 블록선도
의족이라는 특수성을 고려하여 공간 절약과 여러 부가 기능의 용이성으로 BLDCM 제어 IC를 사용하 였다. 하지만 이 IC로는 토크제어가 불가능하기 때
문에 별도의 상위제어기(MCU)를 이용하고 각각의 상에 입력되는 전류 값을 전류센서와 Analog to Digital 변환기(이하 ADC)를 사용하여 읽어 들여 토크제어를 할 수 있도록 하였다.
전류 센싱 과정에서 MOSFET의 PWM 스위칭으 로 인하여 노이즈가 유입될 수 있다. 이러한 스위칭 노이즈를 최소화하기 위해서는 PWM에 동기화하여 ON상태의 중간지점에서 ADC의 변환이 시작되도록 해주어야 한다. 그림4는 상위제어기(MCU)에서 PWM 명령이 어떻게 인가되고 전류 센싱이 어떻게 이루어지는지 블록도로 나타낸 것이다. 여기서 ADC는 MCU에 내장된 것을 이용할 수 도 있으며 MCU가 내보내는 PWM 명령의 중앙 지점에 동기 되어 ADC의 변환 시작을 해준다.
그림4. 전체 제어기 블록선도
3. 상전류 추정
3.1 DC 링크 전류 측정
DC 링크단의 전류 제어 방법은 상전류 전류 제 어와 다르게 Freewheeling 동작에 의해 DC 링크 전류값과 모터에 흐르는 상전류 값이 달라지는 문 제가 있다. 그림5는 Freewheeling 동작에서 전류 흐 름 및 DC 링크 전류센서의 위치를 나타낸다. 파란 원은 전류센서의 위치를 나타낸다. Bridge 회로의 하단 스위칭 소자와 Ground 사이에 연결한다.
그림 5. Freewheeling 동작에서의 전류 흐름
BLDCM의 역기전력 및 PWM 듀티비에 따라 상 전류와 DC 링크단 전류간 차이가 발생하고, 이를 look-up table을 이용하여 보상할 수 있지만 디지털 제어 방식에만 적용이 가능하고 다양한 조건에 대 한 실험 및 보상을 위한 테이블 저장을 위한 메모 리가 소요되는 단점이 있다.
그림6은 상위제어기 PWM 신호에 따른 상전류와 DC 링크단 전류의 차이를 보여준다.
그림 6. PWM 동작에 따른 상전류와 DC 링 크단 전류 파형 예
3.2 Analog MUX를 이용한 상전류 추정
Freewheeling 구간에서 상전류는 감쇠되는 파형 을 보이지만 DC 링크단의 전류는 0으로 떨어져 차 이를 보인다. 이를 보안하기 위해 Analog MUX와 RC Filter를 이용하여 이를 보상하였다.
시정수가 큰 RC Filter를 DC 링크단의 전류가 0 인 부분에 연결된다면 전류 센서의 출력 값이 완만 하게 감쇠하여 실제 상전류 값과 유사한 값을 측정 할 수 있다.
다음 그림7 과 같이 PWM의 ON 구간에서는 DC 링크의 전류를 작은 시정수의 RC Filter에 연결하 고, OFF 구간에서 큰 시정수의 RC Filter에 연결하 여 상전류 값을 추정하였다.
그림 7. Analog MUX와 RC Filter를 이용한 상전류 추정 회로
4. 실험 및 결과
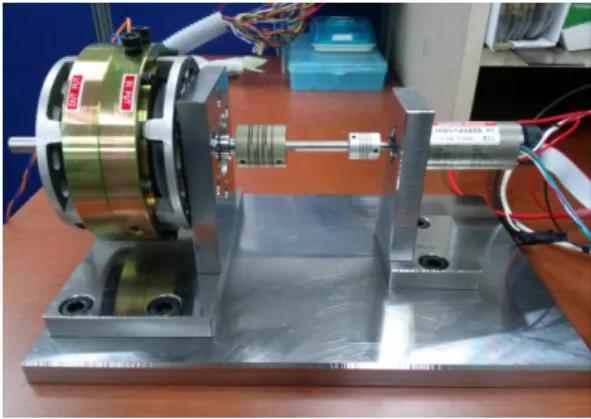
모터의 정역제어, 속도측정, 부하측정 등 을 실험 하기 위해 별도의 축, 커플링 그리고 파우더 클러치 를 이용하여 다음 그림8과 같이 실험 스테이지를 구성하였다.
그림 8. 모터 부하 실험 장치
4.1 동작 실험 결과
PWM인가 신호에 대한 BLDCM의 구동 결과는 MOSFET의 VGS 신호와 PWM 신호를 비교하는 형식으로 확인하였다. 결과는 그림9와 같다(여기서 D는 Duty Ratio를 의미).
시간(50us/div) PWM
신호 (5V/div)
VGS
(10V/div)
그림 9. PWM 신호 및 VGS (D=50)
상단 부분에 위치한 신호가 상위제어기의 PWM 신호이며, 하단 부분에 위치한 신호가 MOSFET의 gate단 입력 신호를 비교한 파형이다.
Rising edge에서 약간의 Delay가 있지만, Falling edge에서 Delay 없이 입력된 PWM과 같은 주기로 구동신호를 출력하는 것을 볼 수 있다.
그림10은 높은 Duty ratio의 파형을 나타낸다.
Duty ratio가 증가하면 이에 따라 전압도 증가하는 것을 볼 수 있다. 마찬가지로 그림11은 낮은 Duty ratio를 보여주며 낮은 전압 레벨을 갖으며 마찬가 지로 입력된 PWM과 비슷한 파형을 나타낸다.
PWM 신호 (5V/div)
VGS
(10V/div)
시간(50us/div)
그림 10. PWM 신호 및 VGS(D=85)
PWM 신호 (5V/div)
VGS
(10V/div)
시간(50us/div)
그림 11. PWM 신호 및 VGS(D=15)
4.2 상전류 추정 실험 결과
제안한 상전류 추정 방식을 위해 상위제어기의 20KHz의 PWM 입력 신호, 상전류, DC 링크 전류, 상위 제어기 PWM에 동기화되어 ON 상태일 때는 1us 의 시정수를 갖는 RC Filter, OFF 상태일 때는 1ms 의 시정수를 갖는 RC Filter를 이용한 Analog MUX 출력을 측정하였다. Analog MUX는 74HC4053을 이용하고, 션트저항은 MHP500R010F 를 이용하여 측정하였다.
그림 12는 각각에 해당하는 값을 오실로스코프를 이용하여 출력한 결과이다. 그림에서와 같이 위에서 부터 상전류, DC 링크 전류, Analog MUX 출력, 상 위제어기 PWM신호 순으로 파형을 나타낸다.
Analog MUX 출력 신호 앞부분에 스위칭노이즈 가 나타나는 부분이 있지만, DC 링크의 출력과 비 교하여, PWM ON 상태는 물론, OFF상태에서도 상전류와 상당히 비슷한 파형을 나타내는 것을 볼 수 있다.
시간(50us/div) 상전류
(5A/div) DC 링크 전류 (5A/div)
MUX 출력 (5A/div)
PWM (5V/div)
그림 12. 상위제어기의 PWM 입력 신호, 상전류, DC 링크 전류, Analog Mux 출력신호
그림13과, 그림14는 상전류의 변화에 따른 DC 링 크 전류와 MUX 출력에 대한 결과이다. 상전류 변 화에 대해서 DC 전류를 사용한 상전류 추정값이 현 재 전류가 흐르는 상의 상전류값의 절대값을 잘 추 정하고 있음을 볼 수 있다.
상전류 (5A/div) DC 링크 전류 (5A/div)
MUX 출력 (5A/div)
PWM (5V/div)
시간(50us/div)
그림 13. 상전류 변화(음의 상전류->오프)
상전류 (5A/div) DC 링크 전류 (5A/div)
MUX 출력 (5A/div)
PWM (5V/div)
시간(50us/div)
그림 14. 상전류 변화(양의 상전류->오프)
5. 결론
전동 의족을 위한 모터 제어 시스템은 의족에 내 장될 수 있도록 소형의 모터를 이용해야 하고, 이를 구동할 Motor driver 역시 소형화가 필요하다. 본 연구에서는 BLDCM 제어 IC와 PWM발생 회로를 이용하여 상위 제어기(MCU)가 직접 토크 제어를 할 수 있는 구동 시스템을 설계하였다.
또한, Analog MUX와 시정수 차이가 큰 RC Filter를 이용하여 상위제어기의 PWM 신호에 동기 화 하여 감쇠율을 조정하는 방법으로 PWM의 ON 상태에 작은 시정수의 Filter를, OFF 상태에서는 큰 시정수의 Filter를 이용하였다.
제안한 추정기술로 Analog MUX의 출력 파형이 상전류의 파형을 작은 오차로 추정함을 보였다.
추후 연구과제는 충분한 부하 실험을 통해 설계 한 회로의 신뢰성을 높여야 할 것이다.
참 고 문 헌
[1] E. C. Martinez-Villalpando,, and Hugh Herr,
“Agonist-antagonist active knee prosthesis: A preliminary study in level-ground walking,"
Journal of Rehabilitation Research &
Development, vol. 46, No.3, pp. 361-373, 2009 [2] Kim, J. H., & Oh, J. H. “Development of an
above knee prosthesis using MR damper and leg simulator”, International Conference on Robotics and Automation, vol. 4, pp.
3686-3691, IEEE. 2001.
[3] Sup, Frank, et al. "Self-contained powered knee and ankle prosthesis: initial evaluation on a transfemoral amputee." International Conference on Rehabilitation Robotics, pp.
638-644, IEEE. 2009
[4] Au, Samuel K., Paolo Bonato, and Hugh Herr.
"An EMG-position controlled system for an active ankle-foot prosthesis: an initial experimental study." International Conference on Rehabilitation Robotics, pp.375-379, IEEE.
2005.
[5] Balogh, Laszlo. “Design and application guide for high speed MOSFET gate drive circuits."
Texas Instruments/Unitrode Corporation,
Power Supply Design Seminar, 2001.
[6] I.J. Ha and C.I. Kang, “Explicit Characterization of All Feedback-Linearizing Controllers for A General Type Brushless DC Motor", IEEE Trans. on Automatic Control, Vol. 39, No.3, pp.673-677, March 1994.
[7] 진승범, “IPM(Intelligent Power Module)의 최신 기술 동향”, 계장기술, pp. 106-113 July 2012 [8] Won, Chang-hee, Joong-Ho Song, and Ick
Choy. "Commutation torque ripple reduction in brushless DC motor drives using a single DC current sensor." Power Electronics Specialists Conference, 2002. vol. 2. pp. 985-990, IEEE.
2002.
[9] Wang, Wei, et al. "Fast Switching Direct Torque Control Using a Single DC-link Current Sensor." Journal of Power Electronics vol.. 12, No. 6, pp. 895-903, 2012.
남 기 준
2013년 2월 한국산업기술대 학교 전자공학부 졸 업(학사)
2013년 3월 - 현재
한 국 산업 기 술대 학 교 전자공학과 석사과정
관심분야 : 임베디드 시스템 제어, 재활공학
최 연 범
2013년 2월 한국산업기술대 학교 전자공학부 졸 업(학사)
2013년 3월 - 현재
한 국 산업 기 술대 학 교 전자공학과 석사과정
관심분야 : 제어공학, 재활공학
정 두 희