IEG 환경지질연구정보센터
6
0
0
전체 글
(2) 스의 송수신 과정을 거쳐서 획득하게 되 며, 획득한 데이터를 처리하여 연속적인 영상을 얻게 된다. 하지만 획득된 데이터 사이에 일정한 시간 간격이 존재하여도 낮은 해상도의 연속적인 영상을 형성할 수 있다. 이러한 특징을 이용하여 그림 1 에 나타낸 것처럼 데이터 획득을 하지 않 는 시간 간격(gap) 동안에 다른 지역의 정 보를 획득하여 넓은 지역의 영상을 한 번 에 획득하는 SAR 시스템의 동작방식을 스캔(scan)모드라고 한다.. 서 영상을 획득하게 된다.. 그림 2. SPECAN Quick-Look Processor. 그림 1. ScanSAR 영상획득 방법. 이러한 스캔모드에서 획득된 데이터는 개별적으로 영상(sub-swath)을 획득한 후 에 넓은 지역의 영상(wide-swath)을 형성 하게 된다. 3. SPECAN Quick-Look Processing SPECAN 알고리즘을 이용한 Quick -look 신호처리 과정의 블록다이어그램을 그림 2에 나타내었다. 거리압축은 주로 RDA(Range-Doppler Algorithm), CSA (Chirp-Scaling Algorithm)등과 동일한 방식으로 정합필터(matched filter)를 사용 하지만, 방위압축은 SPECAN 알고리즘만 의 독특한 방식을 사용한다. SPECAN 알 고리즘의 방위압축은 선형 RCMC(Linear Range Cell Migration Correction)를 적용 한 후에 Deramping과 FFT 과정을 거쳐. 이 과정에서 선형 RCMC로 인한 영상 의 품질저하가 발생하지만, 계산과정이 간 단하므로 Quick-look 처리에는 매우 적합 한 방식이다. (1) From convolution to SPECAN 복조과정을 거친 방위방향의 수신신호는 다음과 같이 나타낼 수 있다.. . . (1). 여기서 는 방위시간(azimuth time)을 나 타내며, 는 방위방향의 주파수 변조율 (azimuth FM rate)을 나타낸다. 이 신호를 방위압축하기 위한 정합필터 는 다음과 같다.. . . (2). 또한, 방위 압축된 신호는 (1)식과 (2)식 의 convolution이 되며 다음과 같이 표현 된다..
(3) . . . . . (3). . 지며 다음과 같다.. (2)식을 (3)식에 대입하고 간단히 하면 다음과 같다. ×. . . . . . 위 식을 살펴보면 목표물의 위치에 해 당하는 위상성분(phase-term)과 수신신호 에 적용되는 deramping성분, 그리고 푸리 에 변환(Fourier transform)으로 이루어진 것을 알 수 있다. 즉, 방위 시간에 대하여 deramping과 FFT를 수행하면 방위압축을 수행할 수 있다. 한편, 목표물의 위치에 해당하는 위상성분은 multi-look 영상을 형성할 때는 사용되지 않지만, single-look complex output이 필요한 경우에는 위상 보정(phase compensation)을 수행해야 한 다. (2) Azimuth FFT SPECAN 알고리즘을 이용하여 연속적 인 영상을 획득하기 위해서는 방위방향에 서 FFT를 취하는 위치와 FFT결과에서 연속적인 영상에 포함되는 Good-points를 선택하는 과정이 필요하다. 스트립모드에서는 임의의 FFT 개수를 선택할 수 있으며, 스캔모드에서는 시스템 에서 설정된 데이터의 개수 이하로 선택 할 수 있다. FFT를 취하는 개수( )와 방위방향에서의 목표물 노출 시간( ), 그 리고 PRF(pulse repetition frequency), 방 위방향의 주파수 변조율( )이 주어지면, 각각의 FFT에서 얻어지는 Good-point의 수( )는 다음과 같이 주어진다. (5) 각각의 FFT에서 취해진 개의 데이. . . 터가 정해지면 연속적인 영상을 획득하기 위한 다음 FFT의 위치는 로 주어 . 위에서 주어진. (6). 에서는. 각각의. FFT 결과에서 마지막 Good-point와 다음 FFT의 처음 Good-point는 동일한 목표물 로 설정되어 있다. 즉, 각각의 FFT에서 ( -1)개의 샘플을 획득하게 되면 연속 적인 영상을 형성할 수 있다. 위에서 언급했듯이 스캔모드에서는 와 가 시스템 상에서 설정되어 있 다. 따라서 각 sub-beam의 PRF와 버스 트를 구성하는 pulse_count를 이용해서 를 계산한 후에 Good-points를 추출하여 영상을 획득하게 된다. (3) Time Domain Linear RCMC RCMC는 선형부분만 수정하게 되며, 선 형 RCMC를 수행하는 skewing과 deskewing과정이 포함되어 있다. Zero-Doppler 시간이 인 목표물에 대 한 선형 RCM 성분은 다음과 같다. (7) 여기서. 과. 은. 위성의. effective_. velocity와 effective_squint_angle을 나타 낸다. 선형 RCMC는 위상이동(phase -shift) 또는 보간법(interpolation)을 이용 하여 수행할 수 있지만, 거리이동(range -shift)만으로도 Quick-look 신호처리에서 는 충분한 영상을 획득할 수 있다. 선형 RCMC를 수행하면 목표물은 cross-range domain으로 이동하게 되며, 방위 압축을 수행하면, 선형 RCMC로 인 하여 같은 range-gate에 위치하던 목표물 들이 서로 다른 range-gate에 위치하게 된다. 이러한 거리이동을 보상하기 위해서.
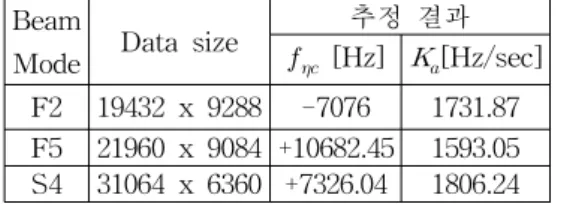
(4) deskewing을 수행하게 되며, 방위압축을 수행하고 획득된 결과 영상에서 선형 RCM 만큼의 거리이동을 통하여 수행할 수 있다. 4. 실험 및 결과 SAR 위성으로부터 수신된 신호자료에 서 영상을 획득하기 위해서는 데이터를 분리하는 과정과 도플러 정보를 추출하 는 부분이 선행되어야 한다. 실험에서는 스트립모드에서 획득된 Radarsat-1의 raw 제품을 이용한 도플러 정보 추출 결과와 스캔모드에서 획득된 raw 제품을 이용하 여 Quick-look 신호처리를 수행한 결과를 보여준다. 실험에 사용된 raw 제품에 대 한 정보는 표 1에 나타내었다. 표 1. Radarsat-1 raw data 정보. 1. 빔 모드. 궤도 정보. Fine Beam 2. # 34522 Ascending. 2. Fine Beam 5. # 39421 Descending. 3. Standard Beam 4. # 37849 Ascending. 4 ScanSAR Narrow B. # 14625 Descending. 4.1 신호자료 및 도플러 정보 추출 CEOS raw 제품에 대한 데이터 분리과 정과 도플러 정보 추출 과정은 다음과 같 다. 구현된 프로세서는 신호처리만을 수행 하도록 구성되어 있으므로, Data File과 Leader File 만을 사용하게 된다. 우선 header정보와 auxiliary정보에서 신 호처리에 필요한 파라미터들과 위성의 자 세정보를 추출하였고, Leader File에서 위 성의 위치벡터와 시간정보를 추출하였다. 추출된 파라미터와 자세정보, 그리고 위치 정보를 활용하여 기하학적 모델을 구성하 고, 구성된 기하학적 모델과 Rx_window_ start_time으로부터 Data_window_start_. time을 획득하게 된다. 여기서 획득된 Data_window_start_time을 이용하여 전체 영상에 대한 Doppler-surface을 구성하였 다. 한편, 신호자료에서 ACCC(Average Cross Correlation Coefficient)를 이용하여 기저대 중심주파수(baseband centroid)를 획득(Madsen,1989)하여 기하학적 모델을 이용한 Doppler-surface에 대한 편이 (offset)값을 구하여 보정하게 하였다. 편이 값을 구하는 과정에서 영상의 중 심지역에 대한 데이터에서 단 하나의 값 을 추출하여 사용하므로, 전체 영상에서 값을 추출하는 과정에서 소요되는 많은 시간을 절약할 수 있다. 또한 Doppler -surface도 기하학적 모델에서 얻어진 영 상의 중심에 대한 상대적인 값을 그대로 사용하여 영상전체에서 도플러 중심 주파 수의 변화에 해당하는 다항 계수(polynomial coefficient)를 구할 필요 없이 매 우 짧은 시간동안에 전체 영상에 사용되 는 도플러 정보를 획득 할 수 있다. 4.2 도플러 정보 추출결과 표 2는 위의 방법으로 구해진 스트립모 드 데이터에 대한 도플러 정보를 보여주 며, 그림 3, 그림 4, 그림 5는 추출된 값과 테스트 프로그램(CSA, RDA, SPECAN)을 이용하여 영상을 제작한 결과를 보여준다. 실험 결과 스캔모드에서 주로 사용되는 Standard beam 뿐만 아니라, Fine beam 에서도 영상을 제작하기에 충분한 값을 제공함을 확인할 수 있었다. 표 2. 도플러 정보 추정 결과 Beam Mode. Data size. 추정 결과 [Hz] [Hz/sec]. F2. 19432 x 9288. -7076. F5 S4. 21960 x 9084 +10682.45 31064 x 6360 +7326.04. 1731.87 1593.05 1806.24.
(5) 그림 3. 테스트 프로그램을 이용한 영상형 성, Fine5, CSA, 2-Look, 5120x4096. 그림 5. 테스트 프로그램을 이용한 영상형 성, Standard4, CSA, 4-Look, 6144x3072. 5. 결 론. 그림 4. 테스트 프로그램을 이용한 영상형성, Fine2, RDA, 2-Look, 4096x4096. 4.3 ScanSAR 영상 형성 결과 그림 6은 ScanSAR 신호자료에 대한 Quick-look 영상형성 결과를 보여준다. 형 성된 영상은 각각의 sub-beam에 대한 개 별 영상을 나타내며, 하나의 전체영상을 형성하기 위해서는 기하보정과 영상합성 과정이 필요하지만, 본 연구에서는 신호처 리 과정만을 수행하였다. SPECAN Quick -look Processor는 각각의 sub-beam에 대한 모든 신호처리가 메모리에서 진행되 도록 설계되어 있어서 영상형성 과정을 수분이내에 처리하도록 하였다.. 본 논문에서는 스캔모드에서 획득된 Radarsat-1 신호자료에 대하여 SPECAN 알고리즘을 이용한 Quick-look 신호처리 를 수행하였다. 스캔모드는 스트립모드, 스팟모드(spotlight-mode)와 함께 매우 중 요한 영상획득 방식이며, 구현된 알고리즘 은 국내의 SAR 관련 연구에 많은 기여가 있을 것으로 예상된다. 본 논문을 통해서 구현된 프로세서는 영상을 확보하기에는 무리가 없다. 하지만 SPECAN 알고리즘은 선형 RCMC를 사용 하기 때문에 Quick-look 또는 실시간 처 리(Real-time processing)를 이용한 브라 우징 기능에 적합한 알고리즘이므로, 높은 해상도의 영상 또는 SLC제품을 생성하기 위해서는 보다 정확한 신호처리 알고리즘 이 필요하다. 향후 CSA와 SPECAN 알고리즘이 결합 된 ECS(Extended Chirp Scaling Algorithm)을 이용한 ScanSAR 신호처리를 진 행할 계획이며, 신호처리뿐만 아니라 영상 처리 과정도 포함된 통합 SAR 프로세서 를 개발할 계획이다..
(6) (a) beam_selector : 2. (b) beam_selector : 1. (c) beam_selector : 0. 그림 6. ScanSAR 영상 형성 결과, Radarsat-1 SCNB, Descending orbit.. 사 사 Radarsat-1 Fine5, ScanSAR raw 데이터 는 (주)쎄트렉아이에서 제공받았음. 참고문헌 Ian G. Cumming, 2004, A Spatially Selective Approach to Doppler Estimation for Frame-Based Satellite SAR Processing, IEEE Transactions on Geoscience and Remote Sensing, Vol,42,No.6. S.Madsen, 1989, Estimating The Doppler. Centroid of SAR Data, IEEE Transactions on Aerospace and Electronic Systems, Vol.AES-25, No.2. Ian G. Cumming,Frank H.Wong 2005, Digital Processing of Synthetic Aperture Radar Data-Algorithms and Implementation. Artech House. 고보연, 김만조, 이석호, 2005, Radarsat-1 신호처리 S/W 개발 및 검증, Korean Journal of Remote Sensing, Vol.21, No.2, pp.163~171..
(7)
수치


관련 문서
본 논문에서는 효율적으로 문서 요약을 하기 위해 문서에 존재하는 대표 키워드 를 추출하며 추출된 대표 키워드를 상위 키워드와 하위 키워드로 나누는 방법을 ,
단일 카메라와 단일 랜드마크를 이용한 비전 실내 측위를 위해, 관련 연구 [30] 에서 는 호모그래피 [31] 기반 영상처리 알고리즘을 이용하여 로봇에 설치된 카메라와 QR
ㅇ (민간 작은 생활문화공간 지원) 인천시의 브랜드 사업인 ‘천 개의 문화오 아시스 사업 ’ 등 민간의 작은 생활문화공간 지속 발굴 및 활동 지원
따라서 본 논문에서는 콘텐츠를 직접적으로 분석하기 위한 방법으로 콘텐츠를 구성하는 텍스트와 이미지를 함께 이용하여 콘텐츠 간 유사도를 측정하고 추천
따라서 본 연구는 다양한 보건계열학과 학생들을 대상으로 구강건강행위 를 조사하고 관련 요인을 파악하고자 수행하였다... 05로 하였다.연구
본 논문에서는 로봇 환경에서의 텐서 기반 다선형 주성분 분석기법에 의한 동 영상 기반 연속적인 얼굴에 대하여 인식 방법을 제시하였다.. 로봇 환경에서의
발 부착형 IMU 를 이용한 보행 방향과 허리 부착형 IMU 를 이용한 보행 방향의 성능 을 분석하기 위해서 서로를 비교하는 실험을 수행하였다 실험 결과들은 보행자의 방.
따라서,본 논문에서는 엘보우 내부에 감육 결함을 가공한 실 배관 시편을 이용한 파열시험을 수행하여,감육 결함의 기하학적 형상과 하중 형태에
