e + A f e l : 4 E : E l E l Vol.2, No.1 P.48-60
Forward Dynamic ^JE4"f rJg
"l+t e+q :a4q otLl"told
Gomputer Graphic Animation based on Forward Dynamic Simulation
c t r l d
Park, Jihun
* q 4 q r
Hongik University
o!1
3-
ol =Ee d++= d+q f4E {q"x"ldg 6t7l9le 4s.g u}H.g 'tl^16}=ql, ol49 forward dynamic simulation nl dld€ ts*c4 4gc ^l+* 4014. ol *B+ ^!+4q ^l€4olde a+, €444 71444 7l +q4 ail'+g ?7il ++^le + qq..lEdforwarddynamic simulation zlHg 561 tsl ^lE4oJ Fzlql 44q ol+ dzJ+= +49 4*+4. olqd ^lE?4old 7lH"rl dlde ,J.a4 4Bc ^l+4q a+q rqE olq4ol d 71Hg "JEq. 7lB4oJ *Bg Fzl 4q 7l*g +44q {$z}z} olqEXol,g 6}nz} 4= +49 "J+ ^l7l
= a"JEjl, Hld€ e+q +als H+4q 444"J +sE q= aol4. dlqe forward dynamic simulation €
^l++ oflqElol.9g 4tzlE 714 4+q,4571€ 7|zlzl g:e Z+e Ll:-q F49 44*Bg ,I^l6l=ril.
561 d€ 4+4(*+)€ zld 49"ll r{4q E4 €l€.il 4z}g 4qBC 4l^l+4. "l+q + +4 4}q"I +d dE ""l3lrlg" el "^}+el gqd" "{q !_q=4.
Abstract
This paper present a new technique for doing realistic computer animation. The method is based on forward dynamic simulation and nonlinear problem solving (parameter optimization) technique. Objects are modelled physically and simulated faithfully while satisfying kinematic and geometric constraints. This forward dynamic simr.rlation gives us very realistic motions especially for non-voluntary motions. Then we extend simulation technique to do animation using parameter optiniization. The basic idea is to add motion control ov€r'the entire animation. The motion confrol is finding optimal solutions while satisfying user's animation goals. We provide two different animation technique; one is for rigid body without joint actuators and the other is for rigid body with linear joint actuators. To achieve motion contrcl, we conv€rt single sirnulation to single nonliner fimction evaluation while eitler setting initial conditions as variables for the function or allocating control variables in terms of time. This method is presented with two animation examples: dice-magic and human stand-up.
ol tE= 1e{r5 tlE Et=rlt4EE 3E3lrl g+Hlol g4q c"5tflE.
II
I
Computer Graphics Society 48
Computer Graphlcs Anlmation based on Foilald Dynamic Simulatlon
l . A { E
?*el :244 4qolold (computer graphic animatiod4l 9lq^l d++= +49 'J== aol
?s44. d++= F4€ ".lEzl 9i8l^l=, s=
E4€"1 Cq4 ts4C Eles+ +q6l +4. Et 54"llE zlg4ql F4r+ dlxlg4gl t4.l 914.
ul"J4 Fzlg ^!*ol a= 4nl ee, =+EL q4 + 45:7lql q4 gg x|{{ee R!=q^l ql=
€.t:6l3, Hl zlg4 CEe qqt *+el +F7lE Zt.z 9121 Slg a+o14.
o l E l t C?lqg ol${ o[r]uiolC4 ^ l E 4 o l
€el ilol= tL4g 4qg + flL+ s=+.il g q 9 1 4 . + ^l€?Xolde qttl+ C4"il 4e sqq 4 sE"dg t* =21;141 44 qqtJ 54ol t+
9-=4 ++61= aolI, ol tl4g forward
dynamic simulation ol4 +e+. r.el4 olLlulol,g
g ^l€4ol€.t14 *'4 44 zlFztlzl -s+€4. + +qE qqt €4€ "J€a dgs-e €4 4l4zl el elE'ql E+4 +16l= F4g "JE6l B + 9l"l"l
++.
Forward dynamic simulation g ^l+4q {Ll ,Xol€g 421"il= dzl *4. f. ol+= t.zlg Cl 44zl d:l 9*71 q$olEl. Eqs +^L+l7l E4{
a+E ..n4421. €xlzl d +^l9l E *t}r+ ?^l I elilFol F5+ ad.l^l +^l9l€ El+qql e d +, ar+.E. +_s= Bol +471 g6l= tsg "JE z= d,(l e*4. qqBq ^lEJ:lgE ee + +q 4 g4= Eg RIE + 9lC aol4. qzlol^-l +^)
9l= tJd4= 49 forward dynamic simulation4l
4'+4.a, €4= +^l+t Hg "J844= 4e a4 e +s= E4C 4lq4q .Iq'[ol€g ;]44=
ac *+El. 4e +Eql^l "l elE ++4 trE ^il sl adg.s €4e +^l9l Eg "JEol Lll= 4ol El. "l E4lE +El4ss .s.EAg + 9lEi. + + 471 g6lE B.l +*c qql= +e rtg +a, g 4= +.sql^J Bqa++ +ei rtC tB. "||rlo["I d e4= 4+el *+ql ql+ 44 rtg +61= E al.e sE?g + 914. + +qd azlilol^J 6JH el +^)91 E:l= ^lE4olrde = =zl:1 59 o +s E q, tHel El+ tlg alt}6l= aolEl. ol
*+= "J€!4sE ++ 44 rl5ol *61^l +.14 .J 44Ag *zl 961^l= 4E ,*zl 96J 5Bt TlHEol E3-4Et.
2. gH e!+E
ol al4nl forward dynamic simulation9 ol*t
a + q r 4 E . [ t ] o l o l € T l B q l q l t € + g - s . =
4el 99E1. =44 forward dynamic simulation4l Eilt €+Et3l, inverse dynamics9 ol*t rl€4 old 4 olqElol€[34], =4r. controller (4lq7l)
€ ^l+e oilq461.9 714rJ627,n,n]€ azlg 4 ol gEl.
"JH!4g.tr. C4rlg ol++ otq4old TlBe +4:l +tsss +ts + 9=ril, :a t4zl +Bg forward dynamics E ^l+fl5+ 4€ inverse dynamics € ^l+*=+olr, 4€ +Eg olqElol dc al+ F4 dqql ilq^l F4q ^14 +q € 44 lqe + 9:+ fle+ ol4.
o|r-lufiol{ F4el ^14+q €4:l r.Qt F 4 :ilqt20l= El d€ ++.{ Hl dq 4 "+ adg +E eale tslg + gla, .1q401]d g++t + g r ^ld"{ q"t4R} rqg A+E re'lt F4 g +4.il21 9le ++ ^Iol7l€ ^l+4= 49olrl.
+6'1 olel+ 4l4zlE ^l+4= a+q= E+el 5' + s.H.E= A+q sg44q rgt€ols Fq4
= a+e^-ltl6,27], olEe *Bg ^lzt+El €44 d4l 844 r|l+ ril6l7l B4ts6tr, q* qEIEJ + 4 . g "t+71 q6lq F4 4lq= 4 +zlq,.f f + ++ 4lolg actEl. HIEllg. d4 t|21.il E8+
dlolE .zelg ,a+, +* dl d€ *+4 ++4q
=zl4 qq+E--e, 4l-l|,tl{ol *ol a4= edol el4.
2.1 Dynamic Simulation * Animation E *
Dynamic simulation I simulation 6lLzl 4=
Eil+E '; +q Fel +91 +aC r461q DIE"J 4 4 9 + E + * , = u l B * C 4 9 * 2 1 : 1 + q ^ l A.|| 44 +ol7}ts dol 4. Simulation 9 4r&Ee
= r . , i l , + 4 1 , d q E q + € C c A * L o l 9 l o q ,
^J €Lqg €+61ts "J*q^l= =+g telq 4-s-
=. -s.ga4q simulation *4.
2.1.1 34Etl{ qt dynrmig
simulation
ad Eil simulation € llahn[9], Baraffl2l 5 q l el4q a+q f4E4 +"F"1 5."Jg9sq, c q q 4 +ac .*.*^le i gloos drJ4= F4 g A+qe B4g + SlEl. adl €il simulation g q4q Newton 4 Euler eJ B4C ol+4q El + * 4 4 C ' J = r , r.il5.l +e5es € a E q 9g a+, +€€e 4l+Es zl+6J4.t81 0lzl+
modeling ol €+€ +E d+ 't Czl d*.1 'lt'J modeling ol EgtEil, +Eel
"d.l
9= d+tr
49 Computer Graphics Society
Fonrard Dynamic AlEEllol{lE 0ltE! g#El :1rf4 0[Ll40ll{
e l 44, d+ €qFC 2l+6lq +5d 4 4,1 d +dg- 4ltlEir, +€^l"I= ct'"d..el BEIE Rl€
6lq += 4e1 {ES simulation g ^lz}8.}Zl € q.Ig,zl Erll7l "dzlg 4 d+ol "Jq+= Fztl 4 g qel Cil= ,le] +4ol;1l g+=tl. ol q olE A .i 6Jel t€g ol+21 6l= *qg Al.tlE g-c6.1 4.t31 ol q+ iliilgrll simularion g aqCg 71 6l
71 96lq ol+ 4e ^l+el +$ls a4q d46l , 1 q = E J l , + 6 1 + 9 + A o l ^ l + q F ! + A e € + z J .J gol zl+i} q= +d 49 ^l ael +9.s.
simulation g alEJ ^l 4ol 6lEs y+e- ^lrJol 4.-s
€rl.
].;ll g^l simulation .l glq^l qeJ+ d + 6i+=, cil7Jel d+ +-al olEl. "l r+49 ++61 uJ99l, F6J ol rlC"l^] 9 9zl(error) = A4l simulation I :.-e:1 11 9ee 4la1E^lE 5.g4 .J +E/4zl 41 zlzl *Hq ed6lEl. +4q=
CilSE +€,J,.l 4^Izl = {+r+^ilolE}. H}+H g ^l+6lq Czl 6}qg i{t6}= *Bq t4l ql xl
^l I*Ei.
a;ll g'll= simulation 6lz1 9+ 5qs4 modeling 7l B g 4el7lrl7l ,l"Jq q !14.
Robotics Bolol^l 7Ig€ 7l Hg 4el Eil+B B}'l el zl+E€ Tlal *d"J 'l+61= modeling zl pol +, A+El rr.lE +.9-s 7tl*€ F4+zJ modeling zl Bg :l+Ezt 3 "J +eg 6l+61= a ol y+4.t11 :1+ qPe +€.I 4l+g ^l+6lq +
€ 9 z l + E = = e g + 9 4 . t 8 1 . l e l { $ z l z } : l modeling 7l B€g ar+4oe= FoJ+til, 41t4 C " l 9 q ] ' J * " & + : l o l 7 l k l E l . q = E q Thomas I 7l Bt3lle rial*oe= +4 R}, Alat4
4ql +++ matrix 4l4lol f*"1 gEl9q 9q^l Tjltl^l+ol 94 aq= HlC, recursive ,Newton-EulertTl Fg H!+4ss 4l,tl6'l-Bs iJlll
^ltol 3*g *49 r,l=4.
2.1.2 +rll qEg ol+iJ simulation o l +ol= {grl =fllg:.l +4qq +e aerodynamics = Tlul 6lq F+9 ag +ol 71 96ll
^l€.9"1 dor_1, :4 !_€El qol ilzl = g+El.
STGGRAPH F.l g_Eq= .l+ d,J+= +;tlsE el ril+ee +ol4qs 7lE= +fl aol4. +^l q'+9 ^l+6}q olilgel source el sink€ 7l4l ,J++ +4 simulation oj g-E q9gqtl0l, qg ol Hl+ol +lE4= 49 simulation '* EE[33]E
*s.qfl4.
2.1.3 +€C 5? dynamic simulation o l 4e * , J , 4 q , + + 5 + € i l =
Computer Graphics Society
simulation t;l7l I EJ 7l B o g, spring-damper model 4 mesh generation zl B9 ol+6lq lile-]
E l + * 4 4 g + E - l l \ ! 4 . 6 l E l + * z j 4 g ^ l A " l u|4 €tr dynamic simutation g 61711 €rl. ol + otel C+zl= J. Platt, D. Terzopoulost24l Fol4,
^ l + e ] €+4= g= s}CoIE ^l+€4. *Eg dynamic simulation EJ A+, +Eq= El+ *44 9 state vector 9 zzlzl 4*41 tr14 d"Jg H/l qq, 6l+el *g ^l+ +4.I 4-J simulation 4l tiB+ ^ltol 4.,cg7lE. +El.
2.1.4 +q$ dYnamic simulation
ol ElBg ^l* +e 7ll+4 Fel Fg5"I EI + =+ +dg €+Elq, Fg6J/+^l.J +cg E + 9lE+ =+.I EId dynamic model I 6lq, "J + ^J *q4 E.l e_l6t ^lEqj1 Sl4.t3bl qE6J
dynamic model E spring-damper = ^l*61=ti,
dril FCel ++ 4e= ^l+61q. =+ 4ill simularion ar+el tsli/+agss tl"*6'| c+61 4. ol el * =+ .E.gg +e€. zld J.il C^il.I a '*^l A ^I*F"l rB + ;.^I $iil dynamic simulation g ;J4.tl8l q7l^l 'JHl Robotics 49 ,lol dg 34ol actuator += dol q. ol =++
C€ actuator ol -g r|+e robot F9 rotary actuator e+= +sEl. ol +l + aE .$* +ol= ^l +ol rlC.I *g 4+ qq;J .l^il4 €6Jg Eg 7)oJ7l ? 49 "lal 5 E +Ee. El a88J + 9l= ^l E g
4€?Jg s xl {-9.E ?7] 7l 94 z} =+"il g"}
"J?el Eol =Ezl ? "l 6Jg .rleJtr q€ =+c 7ltsJ6l7l 9+ g5ol g.c+71 ? 4.+ 4+^l7l 4 +Ag Bzl=cl Hl*^lzJg 9"l"Jzl ? 5el qel zle€ al*€ + ii4.
2.1.5 Dynamic simulation I rl*t Computer Graphic Animation Computer graphic animation ol flq^l +7lzl
= +d^l= Ezlel Ar+ 4l"lel €elCol4. z1€
el, E'+ olzl E gol 2^ol= 7l B9 key frame * Bse, ol ElHg 5zl9 ag .aejalul ?+=
4.t321(ol *B"l 9iq^l= dynamics E ^l€-6'l;(l g+=El.) ol *Be Fzl 4lol= +61 dEl. 4= + El9 dynamic simulation g ^l+6lq animation al
= *B'JEil, 34 dynamic model I 714 v+^19
*ii zilq animation(dynamic simulation + g6l=
l i 4 g e . i i l q ) e l a + o 1 4 . o l A + 4 q "Jq"l = + Fzl ilEol4. ol 5+ tlizl lil =+
d y n a m i c * 4 4 9 F 6 l E u l C € = q E o l q r , Hl d€ *+ iJ"l qel +€g Tlrl jliil€.ztl
50
Computer Graphics Animaiion based on Forurard Dynamic Simulation
dynamic simulation ql oJqqE, EE| EJ Hl C€ +
€ Fzlol +9-41 q= 4olc|.[park92] cJ$;l ol el t 5-zl5g +ildl El Bzlts 6lEE_, key frame animation 5 El +"1 dq B7l3l7l+. ai+€ +=
zlzlq} Ej€- zlts+ E+5 -H_4= €tl +=il4.
:14+ ol 4"J *Bg +41= ^,ilo] 71 6J=q dEl=
4ol 4. r ol += Fzlol ul .$$ol eg, cost 6Jf E "l+ ul-$$ ol eg global oprima +71 zl dJ=q ,l 71 45iol 4. ol ei + + ;,9 ,rlol 4l 9P 4= dJ { g o l f { a J Q .
"Spacetime constraints"l34] ts key frame zl B 414 dynamics = ^l+61q, F4e1 ec 446J4.
ol ,JBg finite difference zl H9 ^l+Elq, +€
4Eql r.il6J 4+E 9 + 7l+EZ 4lt6J4. qzl ql^J ^ilqde- ^l Ael ;€;tlel +€el 4E"l q, Zl 1!€ 4+E 4 4 7l+EZ ol+6lq inverse dynamics = 2lt6lq, ol Aol cost *+9 "J+s
^l*€4. ol a+ zilAi€ 4+E 9 4 7I+Eel *
g aq6lzl *6'lE, El+7l:.6111 g+El.
IL4C "JB g "Following Footprints of Reality"l2l] 4 94= aoe, ^l Ael 6Bt]el 4 z I 4 E E ^ l + 6 i q a I o l S C E 4 . o l a + , 4 + E 4 + € 4 E = S + o l q E l € - 7 1 E 6 1 4 . o l E J - B E Spacetime Constraints + +^16l/l inverse dynamics E ^l+8lq E4.el ac a4dl=El, F zlol :rF €+ol + polynomial s S.€gEl. ol * B " I ^ - 1 = € d + C + q 6 l 7 l 9 6 l l E 4 B = l E g ^ l
*-JiE' gaJ",rl zl 4, TlElEi4 J9 model g ^l+
6lq 5-zlel 3g +46JEl. q olB"I 9lq^l dynamic simulation I inverse dynamics *+= 7 '-lq 4 e6I= +=ol o g, forward dynamic simulation r+= C Elqlg d= *^19 7li]El.
" i ^ J q * B = e F z i " i l + € € 4 l q d g ^ ) + 6 1 4 , F 4 g 4 l q 6 l ! - - s t r t i 4 g E 4 l q = d 4 . :a314 Spacetime Constraints el 5+ *+=
piecewise linear interpolation g ^l++ +=ol og ul$ol $z|;|{, "Following Footprints of Reality"
el Fzl 6J+= 3 x| polynomial ol 4.
Suboptimal Control[94] 7l Bg E=el z]g'l
^l 4lq+4. 34 dynamics = ^I++ *Bg +€
rorque I "J571 96lq i.+ dag ^liq6}rl "J [20], q7l^l= ^l t9 EE+ *€9 torque *ol
^ i l q d o l g + . " l * 9 d J B E g Fzig tEzl 961 q F+9l ^l zld +EJ Erl^l leialq, elobal optimization ol z|-L dJEi.
E El= *83 local optimization "iEl. ol * Boll^l= 5lz+g ^l zl+El €4zl ?_4dl nelalzl P+-g-s-e-. + a4= ^l ,J59l nilEdC q]+^l 7l 7l -J=4. f.elLl r"JB Exi 571= +l 9lll4. "l zl H4lE forward dynamic simulation g ^l+6J ar+
inverse dynamics oJ ^I*6J a o g 4+4 I +
9lr+. MIT "il^l= 9= robot Eg 7ig6l9=r,ll, ol ag ++Elq animation g 6I94.t271 MIT E d * H l B g r S o l 7 l g 6 J robot * 4lq7l u.ar tJC animation C I6lq forward dynamic simularion'J rl"l 4. ol *Bel e4l dg 4lq7l = local optimization t € + lln global optimization e 9715614= aol El. !t4g +al de :Iol zl =
g =+'J 5zi"JC 9.J aol+* doi4. 971 I oil^l= ol elal +49 g"J Ezll9 .4lq7l 7l €s_61
jL, 4.71 gEil^J= E.Elg ^lq7l7l €S-a}c}. 4 4 9 s= 6JF.il rl6lq vtlqTlTl €.t;14. ol + 4
= dlBg inverse dynamics E,tl$t 4'JEll, University of Pennsylvania ql^l dil6l= "J^i "l El.tl4l =E4gq ol ElBg local optimization I
"l +6lq inverse kinematics Erl€ += aol 4.
ol qEJ €-xl€ +=ri 9lq^l inverse dynamics € 4l +i++s ^)+5lq *9 inverse kinematics oll 6 4zJel 8tl= *ol.I= a.l El. +,zlel +4€- ol+71 9al€, tocA optimization g ^l+6lq dJ f,rJ"l 9lq^l +_E"l Tlzlol d=6iH^l 44el 5L49 t
= = dg *"1 4'J + il4.
Animation g 8,l=Ei ilq^l q€ *Hc cq g a"J7l7l "i+ ?9-614. Animation E6.l ?9
+ 4 4 9 4 B 5 J + E ' F d l 4 g 4 t l t 4 o l s + g
d*, forward dynamic simulation I gdJ6-l=
"JB
g ^l+6lqotEJ da+= Fzlc ec + il4. ^l +9 a+5 4€ zll^ilzl zlujleg s!5q .N=
5zl9 forward dynamic simulation I ^I+6i;tl ?*
o l E €+. + +€ +f.q sa TlBss 6++ a
* z l r * c | . rq + o l + + E g i 1 $ z l $ u l $ z l i
+ .tszlC t5"J r ,-lE forward dynamic simulation g "l *6J computer graphic animation I 6lqoF 6J+.
3. ^tEeflotdE +1il Egg
o l r + 4 9 7 l +Ei "l FqEIC ^l+6lq E4q gEg El + *zj4l o.a +E611 'J4. ol {zJ4l ^i
Newton-Euler[7]4 Generalized Principles of
D',Alemberr olBFg ^)+e + 9l+. ol +rl 6lq + E + E I B * a 4 c 4 7 l 4 t g 7 l = e - e 4 B 6 I E
^l ,J.l EIC gE a!+€ 41t+ + 9l=c]l, ol 4zJ
I forward dynamic simulation ol 4 +q. Forward
dynamics .l^'l= .J +g C5"* F.l +qdg q rA+E- +-s= gti, + H9, +E "l zl4l*==
4+g F6lq 4al6JEl.
3 . 1 7 1 6 l e t 4 E g g
o l r + 4 9 E l 4 € , + Fq +ilg reliE iz:
5g ^l+6lq *:l?l E;IES RlFgE- 4
51 Computer Graphics Societl
I
Forsard Dynamic AllrilOldt ol8f e#q fr[E oflqqol{l
simularion "il +€9= +ag TlElEl ziog "J=
EI. "Jt ol el * €i"I5ol gq 4 g -a C q6l4l simulation 617il q=Eil, ol !+4"1 gq^J *E- d + "i 44 d+q "Jq+iil €4. + c,ilEol gzl
" J + 9 = € g q E i l + 4 1 " + 9 g 4 + 4s-e 4€
4 B A l n 4 4 o ! * E l . + = A + "t 4zl d+^l zl 6l'E+ zj-g-E. ,lel.'lq"l t} "Jg d+ azl ".|4. d + q 4 € 6 1 "Jq+=zl +e +=H4 "JqLle+
ql 44 +Ed+ 9 ,Jzl d+sg- +Hq.
+5 zJxl= Eq 6171 916il^l €zI +c€ ^l
^ ' J q ^ l = + 4 € s s " J + ^ d € c i i l t E + + E l . sdJ Enloil bounding box € 491^l +E +rlg 4e2l '-l=Eil, ol 4lt.il^l= Fzll9 d4€ol ,tJe.
+58'l=zl a^l6iE aol +,c6'lEl. ol +Ae- ++
6l +dJqEs, ol +Bel E_s,:ag +6J t.qol d 'dl +EJ ^la"l *e €.*g 4a4. 4ge <!e6l ,ll 6Eg zlzli;lzl 9l + *Hq4. ol q;J Azl 4 cg g-d^l7lzl 96lq q"l r.qg 7lg"J + 9l -e-+, qzl^l= ol++.1 rl6lq
"dg
+zl g}=
4.
Frilel +4€el +59 4^16171 9l6lq +4
€ 4 4 C A q B + + e 4 . B + 4 € e 1 , i l E o l A + 4 € q l 9 4 . l + 4 z l = € E o i l 4 a l € p l ? : l
= 4 Zldg ?jl+t,J4. 4rI 4lrflel zldq ,{t}q
"l xlErj, ol5 + q- 6)44E +4€ A el ui +"I +aldlE olE +4€e +E(+B) *4"1 9l
= 4o14. + 7]dol A +4€ Ultoil €4lalts4 q+= 4l+617.| 96tl^l= B +4€el ^.ilEol EJE
= 4l4lel €E *^1C +E61tr €El. + ol5 qH ,+4e B el 6J Bg .jr6J6)q, B +4€ql sl4 01 +q zl= €Er+ +4014. ia "J+= zl 4ol ^ll E q l E4 €C9= se ^jTllel € E * " i l + 4 l g q , r dg +4e A e-l LI+.l +4li}= aolEl.
3.2 Ealttrl rEg
E l g e Cr]El 4oJ qg{9 + q € + 4 t rl. zB 2 = El'-lel "J4= olilg *Aoil^l forward dynamic simulation + At+= g€?rl. :z B9 u-21 €21 6171 9l6lq "J4= ol:|fl dru[E :afl4. ^lEr.ll ol dE .371 "il= oJxlzl il E d{lg ai46J a'+ 401 €9 B + ileq, f + {rl fl e 4 g 6 J E l . E l + = 6 l + E E + ^ s a r l g q e +c8i9+. oi el 6J simularion g 6lz1 gal€ gzi .I ql6J C4Et 4Sl t-g"de Elgr+ eEl. ?qol zl+EI= Elt}€- y +ol 4 6ln, olal izl "J *6J g x +ol elr 6izl. 9zl9 dz*9 . ol e| a).a +q zl+EE g el rl4, ej+ql^] ++6I= EJg 7 + 7 + x , y + g g f , , f , 4 + 8 ,
i , : - r n g ' f f , , | : f , z l 9 4 . o l u ] +
ODE(ordinary Differential Equation) 9 =zl fiog +El ^l+ql 44 €.E F4 rtlzJg "J5q tEl. ol +I4.I tr14 "Jzl= :aqB 34EJ simulationol € E+. E.E simulation 4:Jol 9lq^l "l+e+el +E ' l 4zi d+e 4+"I^j a49= TlHg ^l+4q 4 q 6 i q o l e 4 .
r g 1 . "J:l ^lg4ol €
o l Xg 4q'X.l^J Ezle dl+qE, 9|4zl g6i= oltrl* SBEJ "Jol "JC6}E+ d'lqol i}4.
Cl= 5tr r oJ:l7l Z7l +l^le +El I ElEl €q a *ql czl6lsa+ 6l= 41"+=dg 7}6JEL. ol qe
^ilE =dg uj4 rlzlE 4q"Iol€g 6lz1 93il^]
= "J.l^-l 7j€+, 6l+q ^lE4oldg dl4el il+
d 4 l + o q + a , + + + a + 4 4 ; i l 8 * z l q r J 7l HEg ^l+6}qol €'JEl.
3 . 3 7 l + f t 4 r g g
J.;l €.4l€ simulation 6l=El qq^l €.:lE ol ^lE- +€-a €a5lq 919 4+, zl+6+
(kinematics) "J r-B*E *ls-61'}. oJqls ^l*ol 4+ sgeg gq ^l*el gg -r.rll Eile A+
6 ) a 4 +9l= +€-e €A+El. fq+ 4 +€ol F z l g + i l = F : l € q ( 4 E ) " I = + x l r l t l 4 . ol el -J +de S"Jseriq zlE "t +e 5zl € qel ^I+C r.eJElqdl 6JEl.
3.4 =E r{El
.r.41 E,ll ^lE40ld (sel€€)"il^l c4q 4ee ;59 E-E6l7l 9l 6J tsJHe +7lzls +ts + il=EL r a4= ^sAr+ tsqE ^l+61= * B o l ? , F d 4 = + F e * 3 i + E 6 i l 4 C E . 4 q 4 - 9 . e d 4 6 l = , ' J B o l 4 . ^ s q l r + g r l = ^ l + + o l B e + € E l 7 l = f + + , ^ g " d r + g q e l 6 J . 1 € + 4 oJ qlol oe 4+^l alalol 9_4 aei^1 tsl+4 6l :l *6|El. E6J ol *tse {q+ +C +B 'f 6i 4 * B o l o i q 4 .
4 e * B e c q q 4 s e 4 4 6 1 = " J B " J s l , ol 49 Hahn[9]q] e] 6il 'il.J€ 4ol E]. + crlT]
+E6J q fg r + *ol +4E + *El. q7l^.1 e r l 1 ! + 2 = C " I 1 + 2 = . l 4 . l l r , i , Z + itl 6c+el Eel=, 7 qEi= €iil 4El*6Jg + 4'11q, ; 4El= +4 ?C+"1^l +Z ,l4rl'.l3 L}El.rlq, 7 ntrt= +€.s}= zl dg 'atr.il r{rJ
Computer Graphics Society 52
+4 EqE ulul.llz, e ts *E 4l?€, p E ul
*dl+= +4{4. qzlq^l I dz} + ts *E * sl +48 +4dEl. +q= 15 zlel ulzlel B+ rt C + 6 t o l 4 = E i l , . r . E e J, 1 i , , :,
+ * a +
0 t, 0 z ol4. s+ , ts +EE tlel "Jel el qqolq. 1= -t
* 7 "14. =4-!' ;elg Fzll el €-{zt +E-^l t'lrlq :l;<l f}iQ=. 7}C+E}.
' 3 e 1 a d g a ^ 1 4 e * , : B q l e l adol Cg6l 4 e*gd 4l4l€ Ae 4** alolr Alt}ol tE.
€4. =44 =aol "J+48 ul:zel zlzl g*=El=
zl4g 444J. El:l+el + =dg dzltcl.
. n\ (e-a:J
* , ( E - A ) - J
t -
\ l 9 i - 0 l r t x I
h ( E - A ) : 7 , x ( - i )
( : i + r i x h ) t - ( 1 2 + 0 i x r r 1 . n :
- a ( i i + d "i) .;- (3 + nf xv).trt
"l4e-l + 49 C47l +E^l Elrlq zl zl 9+
g g 44t 4"14.
t ( f + - 6 1
" 7 ) - ( f, * - 6 f
, 7 ) t . i : o t ( f , + 7 I " 7) - ( 3 * e f " 7 ) t . ' i : o e z l 4 ' f : ' I x ; o l t , 1 : i x 1-1x i) qq, i = d.il 4ltt€ +E"*olr, y' = a++
+E*o14. l5 7llel B+ol 44 =9C 4, ot4el a A o l CB4Ezl q"J+El.
t i x l ' 1 x i ) t > p t i . i t
ol adol cgdltr Elllel xl= aol.a, zl;
47'lel 4lte s+6lEe 9lel + 21448 Sotlr ol4e-l + 4C Eil.tl tsts4.
rA 2. +87.J + C44 +E4.1
3.5 er| g*E {el
n4l gr[4 "J4+ gEg e +4= Czl6tll
€El. olag :1 €.dl+ :a +el +a^lololl El+q ol fzl|c}zl 4E.ol4. drJ+= ^lE4lolrd +e ql ul"ll"ldg ElTl q4q +5|g 4zl ,rlzlzl 9lt BIBE gg4El. +E' il4et El+zlzls 4s"J- Erl sgg ^l+g + gq Fqdlg 6l+e 4^i 4 *Eg ^l+e + ilEl. se €-{lz} ${rl {zl
€ +El"il qle 44E Es+ril, 4zlg +4 44
I BaraffI3l.ll el-t dl"J qfi,4. f,g 2 = '{ 4l
el czl +Elgl ciilE !.qt4. 7 = a+ eq i 4 " J 4 e l o l r , 7 = a+ zldg 44t4. * gl - = d+ ,14 i, "l^lel + C4= +El.{r, i
= 4 d+ zldel dgolq. E.r,il7l dzl *EI"|lr Ee C4 +E +.I €"1 ++61s.e
d , > 0 , 7 , > 0 , - J d : 0 .
f B 3 . 4 z l € E a l q q e d l A
I,'i: o -
7 ' i : p l ' t ' i l - l
i, P3
53 Computer Graphics Society
Forward Dynamic Allilol{!t ol=e E#El filq olltl[tol{!
i
motion
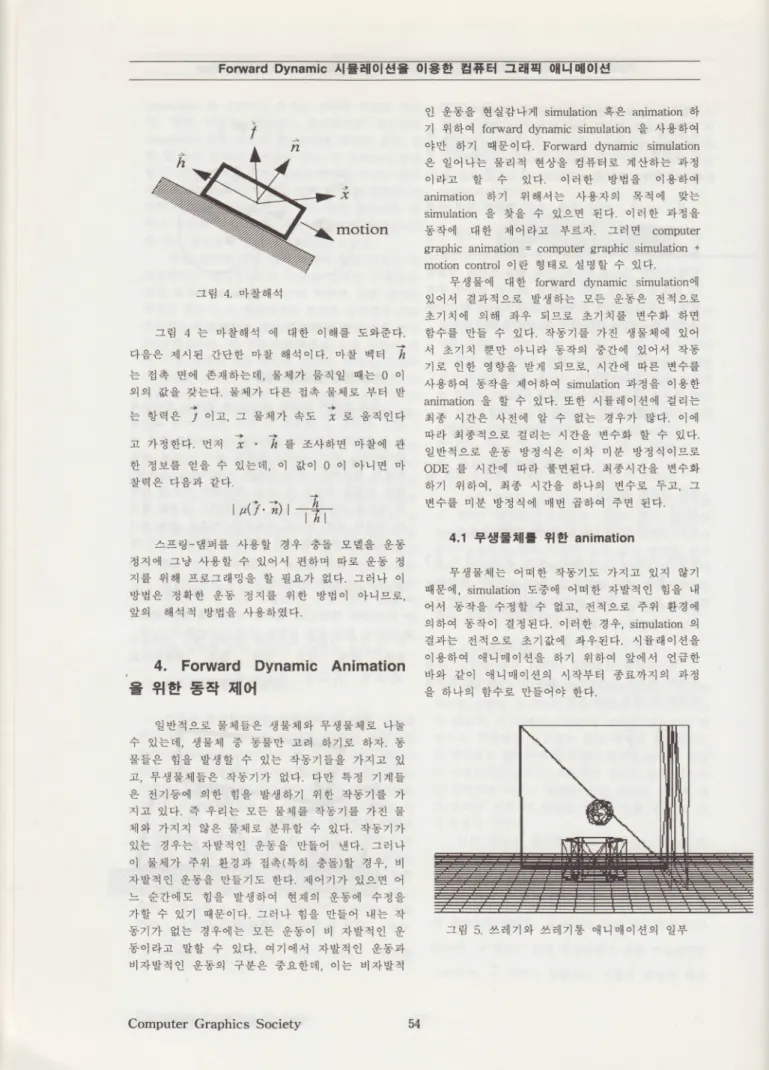
:"8 4. El+44
rB 4 E El+;ll4 oI qlEJ ol 6tg Eele4.
4ge al^l€ zJttJ "ld oil4"lEl. "l* 4rl 7 E d+ tr41 $uN;|iEL €alTt *4oJ q= 0 ol E9 AC +=4. E-4l7l 49 d= E^ils +El tsJ
= s l q e j q o , r g . ^ i l z l + E ; s + 4 " J 4 r. 7lA+E+. dz] ; . i € 4^l6le "l*ql * t ?.rr= €C + 9.1=rtl, o1 at"l 0 ol olqg "l +qe 4g'l AEl.
?
t p G . i ) t - , + ,
I h l
4 g a - g t l E ^ l * g A+ +E sgg S5|
czl ol r* ^I+g + 9lq^J €Elq Eri.e 3E| zJ zl E 9l ut sEf4EJg E €S-zl S4. :t44 ol o l H e a + + g E 4 r l € 9 6 J * H o l "lqoe,
*el 444 *BC ^l+6l9El.
4. Forward Dynamic Animation
t +tEl =:t {tol
"JRl4g.E. €:iIEg ^J€-ilel +^Jgile +ts + 9.1=rl, ^Jgiil + F5"J aq 6lzle 6lzl. 5 CEe Elg "J,.J+ + 9l= +*rl5g zlzla !l n, +^dC4lE€ zlFzlzl S4. 4R! 54 7l7jlE I dzlE.I el 6J 6Jg EJ^8dl7l g+ 4E7l= 7l ,l? 9],4. = +4= s= E.^il= 4Fzl€ 714 g rle| zlzlzf 9*g cil.e. E+dJ + ")4. 4*zlzt il= A+= zl"J4"J gFg "J=q t4. :zl4 o l g ^ l 7 l +9 +a+ d+(5El +E)g a+, ul zl"J4"J gtlg 'J=zls. 'Jcl. 44zlzl 9l"E q
! + + 4 E €g gCaiq €,llel CF"ll +CC TltJ + 9l7l 4lEolEl. .rel+ 6'Jg +Eq q= zl t T l z l S = A + q = - s = g 5 o l H l 4 " J 4 o J g E|ol4r 'Jg + 914. q7l.l^l zl*4"J €-E4 Elzl"J4"J +Fel ++g +giJEl, ol3 ulzluf{
Computer Graphics Society
"J gFg €€++rll simulation 49 animation al 71 9l Blq forward dynamic simulation I ^l+6)q olo.! alzl q$ol4. Forward dynamic simulation g " J q + = C q 4 € + g d # q . e 4 l + 6 1 = r + A ol:la g + il4. ol el+ dlBg ol+6lq animation alzl 9st^'l= ^l+zl9 +4.|l *=
simulation C +9 + gl.qB €El. .l el + t+AC 5zl4l EI"J 4lq4a +e.z}. relE computer
graphic animation = computer graphic simulation +
motion controi ol e €4s €Ec + 914.
+^JC'l 4l;J forward dynamic simulation4l gq^l a!+4sE. uJ.g6l= -E= +Ee d4se azl;1o1 eldl r++ g.E_e aTlil= €++ 6lE 'J+=
"JE + Sl4. zlFTl= 7ld r8E4ol Llq
^-i =7lil :+Rl 6lq4 *.zlel +Aql 9q^l +F 7ls "J6lJ €6Jg 'Jrl qtrg, ^lt.ll trl= E+=
^l+6lq F4g 4lq6lq simulation 449 ol ++
animation g EJ + 9lE+. E+ ^lEelol.^Jql a4=
a+ ^lrJg ^ld"l g + d= A+71 F*4. olol t r 1 4 4+4ss a q = ^ l r J g E + + e + 9 4 . .JRl4ss gF Ela^lg ol:l El + *c:l ol os oDE g ^lrJql E++ €.RSE+. 4€!^1<19 E++
6171 9l6lq, 4+ ^lAg El+$ E+s ?t, = S + € E l + * 4 4 q 1 4 d * 5 l q + E € 4 .
4.1 +95{ll Slt animation
+^85ill= qq+ zl*,7lE 7lz1a- o)21 ?*71 4+ol, simulation .E+ql "iclt zlE4"J flg .fl o l ^ ' l F4g +48 + Sa, d4ee +9 +Aql 96lq F4ol a4€4. ol elEJ A+, simulation I a 4 = d 4 s s 1 7 \ 1 k q a l + € E l . 4 g 4 o l € g ol+6lq .lle"ll.l€9 6,121 916.lq *al{ {i!;j dle+ aol qq4"l€el ^14+El *Ezlzlq 44 g 6l+el ++-? +=qol +4.
r B 5 . 2 l q l 7 1 4 2 r r { 7 1 5 ; 4 q ' I q d e l "J+
Computer Graphics Animation based on Fonvard Dynamic Simulation
- -tx1
-rA 6. 4zll7l-r^.Al 7l Fel forward dynamic animation C 9+
6J+q
"J+
r e 5 = E l i g d 4 € e s + ^ . r € * q E I I
€ n l e + F 4 A o l , J A + 4 € 5 i l 7 l g n , I t + + TIel qol 9lEl. ol 4* "zetlzl 4 a4zl F" +,I zl +=zl. ol gxlol .! j^/ll 7l € 'J4 4 FTll= * dJ + 4r/ll 7l F Slq_E 5-q7lE+ t54r eEl.
ol fl4i^l dl +6J+ (+e +4 ++)= 4.ell 71 4 4 e t l T l + + d + e l 4 4 s l ^ l + . 1 4 , 6 J + e l E + = x, Y, z u3";3:e-99 g5-*ol +. ol A+ ^tl + =a e L4l 71 7l' F"Jql 5-q7loi al4, Fztlg qql + e6l .F +4= ?ol ri. r€ 6 = ol zl+ +zl.l rtl 6J 6J+E ^84^l] "J+= r+4rl=Lll, X *6J9sq c F * € - n 4 ; l ! . y , z * 6 } - q s q e 5 * g 0 . 2 9 ,J4ei- trs+^l 7l tr^.1 6J+Ag e^ldll Bil4. r B4 a"l "*g ++ 44il(local minima)E dJd'J i glqlrl. g5-"1 Hl zlg4"J +€g s6J6l!_s
"++zl "l+ Hl C€4ol q, y+g ++ :il zjil € 7l
^ l 4 z l q l * 6 J + 914. +Edl sBJqE Stsol q
€ 4 1 " J q g f l z l q l = 6 1 7 1 . J = r l l , o l aol +471 € 2++ :=rl= .l++q 6l+o1 4. azl :l ol afruJ Eel"= 7l;lE ari4.J s5-ol ot+ 4_=_11 "J=- + 9l+. ol zl 6J =^J=9 7|rl 6J+el A4dl= * ,l 96lq !l C€ EE-l/l'J zl B4 Simulated Annealing I ^l+6198+.
4.2 gEi{l= 9lt! animation
q7l ^l= 5El =+9 TlTl ^8C41= 9"J ^ll e g o l q E l o l € ( 5 - z l , r l q ) 7 l H g i l ^ l i J 4 . o l * H g 7l =.I 4l ^l g *B.l Hl -ll =+ zl alof laE r|$a|r 9l-s-+t201, ++ zl4loll El]+ Eq+e ^J + + , j B o l Q r E o J t 2 2 l = + € E E a - q + o l q ' ] l . l € 6l9El= dql^l ilol 71 914.561 ol HlBg 4 = y i g " J H E - o l 5 - c " J + 4 9 . I q " t l " i € q l + 4+=J + 9l= 7l B_E_"J.I tsl 6I, Zg l-= ++E .N4oil"l €ql ^I+sJ + 9lEl= aol Q. oletle y*g
oJB=ol ^l*el ,J* 4 ^I*9 €ql Eil+ .]lq"il o l € 7 l H g F " J r J 7 l B s s d l a d J + S q + , o l
* B g 7 1 5 6 1 4 = d d l 4 . d € . i i l = + ^ 8 E 4 l e + 9 4 nJg B + 9l= zlFzl (actuator)g Tlzl n 914.
ol el 6J zi5.zl= CirlE gEg +AdJ + gEl. ol q"J A+, g4l.i tll6J simulation I azl ll g"j olLl el simulation Eiql +F7l "I^l g^J;J €olE ai €6Jg tsJ84. .l ul+ €"Jg HI€6171 96lq
^l ,J.l 4= zlE-71 E dJg *+El 6J g.s7l 914
! L 6 J ^ J E 4 l = E - H - E q E l r l € q z 4 = B 4 "JH]
4 s s d € e l 6 J g "J=q 'll= =+g 7ldEl. .J Rl4qs =+9 ,I+= dJ ^dgnlT} Tlzl = zl+E
!_El ?*El.
4.2.1 =qel Bg +a E-aE El+71 e'lEJ *E
oJg =+"I -Jol 4+6J oi, ol e "Jalq €"1 ++ +€.I ErTl zl+al=Zl = Zltalqol +4.
.l ag =+9 ^l zld(oriein)4 €d(insertion)9 oJ ol^i, t+el 6Jel ill 71 7l +qA 4, ol 6Jol zl€- 6l= EJ6}S "J + 9lq. s€E +dql ^l =+ol z+
+"I= ^l 4rt^14 dlElql =+ol zl+6}-= *-Jq gq BlEl= cross product 6lE, 6J =+"1 96I ul il = +€E trr<i9 "J + 9lt;}. ol Ag forward dynamic simulation "il trJ;il+E €El. t q7l^l = + E d J e 9 l .I ^ l 9 ^ l ,J 9 ; J + s " J q g q z l = t l ol -'., *99 *6Je: .tirl'tl ol € F_+.I ^Jcnlg € i l . l t r ] " 4 € e E J 4 . "l zie'il+ i9oJ 7Nt'og,
MUSCLE ORIGIN
g
--'t
')i \ ',
- - ,
a A 7 J+ soteusql 4 6J moment arm
att
II
55 Computer Graphics Society
Forward Dynamic Alte[o]{!t 01tt g#q refE ollLl[fl01{!
tleelF9 r-E'ol ef,6l2l ^l*.el 6} +€ol B + 9 ] = E 3 " I = 4 r { < l o l 9 . l t } 7 € e ; } q . l ! " I " 1 d61= d'l Hl -l €dEl zl^llB'l ^I?-el *€ e.z
= R^lg + 9l=L{, rag ^}a},ol B + 9l= +
€el E3= -r ^l*E €il €t.l rlzl Bzlzl zl q E o l 4. rls9 :B€ 44+ "J ^lol ql 9il;l=
soleus J$9 +El'JEl.
4.2.2 ^l,Jel il+E ^JC4zl qEJ *B
ol tsJH€- interpolationol 96lq q€5J ^lq
E_ ^l 'J9 flf+s. S€g + tl4l 6l= ,iol rl. olell q el= ^84-i szl. zl5-:19 g4 "Jg ol]qElol .€
"J4a "Jq. zl5-zlel ?*9 m ol j1, {alE .'Jg f(x) ol El. ^l uld?l 0 doil^l+El, a7l +E7l 0 oJ 'll, -gdzl= z|tszl= 2 iA gd'J4. "l A+ a 4:, ^l ,Je ]1A9flEl. €.E zl5-il= /l++ ?J+
e- 6-l + cl El
r I + E t + x t ) = + + + l t E l . I f o , f t , l z
€ rlzl9 4lq E+e "J=r, ol rt-E-ol tr6IE A 4 4 - q E - X r ) E E s J q . ^ l ) z l H + 4 = e l E l = +qzl 96l= qi-e E4g slE + 9.14= ag F +El.
ol *9 el€ oJRl4 ^l 7lzl. Se]zl (n+l) zll9
^Iqdg ^l+61_il., 44el ^riqd9 o, r, ..., n ol 4 '. +zzl. t-d 4lol dg ^J46il Hzl. reJrtl + 4 = + + g q e l z i l ^ l + 6 1 = C i l " l r I 6 J q q " I ol dg BIEE, 4 =:+6J"I r-l]ull ^.ls EIC 4qg zt6}qo} 6J+. ol el 6J +49 ol +71 96ll^.i= 6lLl E ^ l q d . i l 4 4 3 + 6 J g g 6 l q q e l 4 g 4 €
4 z l = T l z l = q q = ^ l + e E l . "l 4El= Z 4 +szl. !E'J +471 olqEilol ,gql ,J4= ^l ,Jg B ^ l 6 + 4 9 * C + 9 l o o - 4 , 3 + 4 4 = ^ l ,J g H + e = t r } . r q E ^ l + 9 = + t r + = E l c r + 4 4 . oleliJ {r H+ EEI€ i =+
"l^1.
a : ( +ii...zi>'
o l r l t o l q ' I o l € E ^ l = H I C € d J + 4 B g
" l + 6 l q E . q , ; = a7la|ol ?9114. "l =zl r l e ^ I + z l . I e l 6 l a a g = a o l 4 ,
- i , ,
i : 0 , I , " ' , n E ^ i + 6 l q u ( D E ^ J d + E l . 8 1 q € 9 € C . J "rl, +rtlg *BE 120,22)+y 94 ,rlqdg ^l ,J41 4dll "J€6J A4 s . a e * e € . e 2 1 g q - ; r l q d , J q A 4 g "Jels
€49 + *eq, "1 'zJ4 zlillE B+s "J-E- +
? t 4 . 4 t ^ r l q d g 7 J 4 € e 1 il e I "l gqot .J 4. ol ag =j+zJ_e-.e- 'J4= ^l ,Jg Ols} ;Jee
^q ^l ag normalize ^l 71 7l qBol 4.
ol *9 ulB.I 4dfl ^JEil {+ : e+ 6J ;iq d i . i ^ j e l E E I i , - . +&+ e+. + q7l^l
6 + 4 e ) 4 E = + E l q l j l , x , y , z = o l q ' l d l . g rltlgel zl = =l-Ezlel 4,21, a, B, 7 z 7li 4 -s.Zlel HJ6JS +4d4.
i , : ( fv fz; "' l-i)'
l : ( x y z a B y 0 t 0 z . . . 0 , ) '
5. it4 6lt= *7t+lt1 gH
".r?,tl zl + r.Bll zl F" 5:rlql^-l Hl+EL+ (S g +zl -J+)= zlzlzl 4 4ei7l F +drJel 71 4 9 ^ I + . 1 q , d J i e l E+= X, y, Z HJ6Josg g 5 - * . 1 4 . "l a+ ^lE eag 4zll)l7l F.Jql 5 ol Tlot 6lq, F7il9 4.]l +?61 .t 6J+= aol El.
f{tlr ___lr-
i -/-- =\\
| (r.\ i1J
L r - - . . J
rg B zlt-il7l "J zl dg r]4 *zl "l ts oil Ll uil ol .9
E_ Fzl. ol dl + €"iel EEI = 5J+ Ll=ril s ^I+
sl }J dJ -3,- =ol zl!-- ri ol 4. ol ol el 4l E ol q EI ol C el +4ql ulzl qel Tlzl Bl ++iE "J5+ ?14.
rel r qzj ql 4l oJ3rJg 7l8J + il=Lll, ol ;I"+
= z J € - . i L l ' i l o l € . 9 + 4 € . E d 6 . l 7 l e l 'J ' i o s _-- ^l+614Ll, ceLI= 5-zl-3 EJ=-rl 9+ +4e s_,F_ ^l+"J + 9,lEl. :E6J ol rle zIE 3ag +s kinematic "i rJ6lq €41 !i3 + 9l:- 549 7l
^l ,1 ?lEl. + ol qql ^l :- 3l + ezl zl dol ^l zlol
^ J 5-El I m €44 91s4, Czle qlg ilel +F_
r;, g ol r|. 7l.ll Ll "J 4 q -:- ^i ,J.l rl6J € I EJ+
E_ "J:,tr}. dJ+= ^JC6l7l 96lq ;rlol dc F=
'tl, 4zl ^l: 4+ ^l 4, +rJ, g9 .'ll ;(l d.J ^l A
* 0 a , l i , 2 i q l E 4 . . l ^ l q d E o l F - - g t q 3 o . g 0 , 1,2 +jl " l E - 3 - € . 9 4 . , / , r l z l q d i o l l { l e l 6 J e l 4 l 'l d } o - f ! , s i , s i , . i ' , r } ! r t l 4 - q - a 4 l q i l i q l ^ l e l i l e l 9 i l , + E , z l + F - z l F 7 l . " J i : 0 , 1 , 2 " l c l . f , A t g C € H t 6lH "l + p€716J 6J+ol 7l = 6l+ €+4"J ^l ,Jql
q /l ql ^l dl +aJ+=
7 2 , ,
I : ) n f " ( t ) a t
Computer Graphics Society
fg 6 = "lq.J +4"1 EI+ *+el ^J?^I g+
E +4lil=Sl, X ts*6}9_eel g€."tg r.46lr. y, z *i}e-eel +5*e 0.2e1 +4ea trEl^l7lB
^l 6J+rl9 a^14 H9t4. rg4 +ol ge ++
44il(local minima)E ga!} + 919.4. +Fol uf zlgzjoJ +59 g+6lsz.*+71 ol+ tsl C
€ 4 o 1 4 , F + e + + 3 4 i l = T l ; ( l = a g q " J e + 914. +Eq s.JqE gtol qB4 "Jqtsflzl q+El7l El=El, olaol 94zl €€zJ9 =4= ol ++el 6l+014. STlilol =?+ HEI= 7l6llE a r+4ql €-Eol ol? 4sil "J= + q4. olel+ F c=g 7la B+el 43ai= ,*71 g6lq Hl cB
rE-:a4oJ zlB4 Simulated Annealing I ^l+6) 9El.
5 . 1 + g E H l d € = = : ; l l " J 7 l E Hl d€ Hl+ ++"1 Hl dB 4lq+6J+E TlTl +41"ll Efl6J 34.11= *71 gdlq cRG2[r3]= ^]
86iHEl. rE+ cRGz e+ ag El d€ package
= tlEl+,/ng +e ++ 44iE Tlzl a 9= 6}
+e-l +414 44rfg *zl *d4. olel+ E^il=
4aE'l7l +l6lq dld€ ue_:1*41,\] ++ 44il E "J*g q 4 e+q rt=g dl+q^t ++ g=
g ^ l E n t E l . c= ol *Bg "l+6lq +44 4zi atg 4= !-+e fl4Rl s+zJol+.
r g I = + + 3 u l i = E q ' l z l e - l + + A
€ Hl CB s-Er4Bg 9-1oj f,,r]E€ +E+{E}.
B=9 ^lE+ q qel ++el *6J 9l rzle ^lE 4=El, "Jg -H-+ +e 6J+ 44*q gdqE r q 6 i + q = E+ 459 4q6lq, r zldol^i 7ll +6lq 446il= *ol ++q.
: a g 9 . + 4 € H I C €
r E-:A4 EJ
"l 4dg Eq +EJ6}7l 9]6tl pVM 5lr+ Ae H€ilq zlBg ^l+6lB 4l.|l ^lAg B+q ol+
Ar+4olE+. pVM g ^l*altr 3El nr1 (t n I tr+ 4+) 9**9 e.e-^1,r'1= ^l+6lq nzl9 Ee 4l^]"tl= 6J+E "l+ttg AltElE+ 6lr. +Elzl E'l+el gE4l^l= olSg +46141 ;J4. ol A+, ++ 4lt ^laol zJEl El+ E44oJEl, 7llt! ^l a g 4+q .J+ 4l+ ^l+ol fs^l^ *4rl zJ "J + r3-€El. o.| ^lag El+e] ee^tl^l= ^l+g 4 aq= {{ol n*(a}u}el ;*+ 4lA} ^l a)*(Hl .3
€ * c 4 q R I + q + ) q l
" r " i l * a E e t a t t ^ t
A"J rs€4.
5.2 Simulated Annealing
ul C€ oe-:24"J 7l Bel fgt tlde t"l +/j1g +e ++ 44^l= zlzlr 91ts ++el + a l z l 4 4 { r C * z l * + 4 = d o l q . € - E o l s l + +4'|= +'-l qdg aolEl. Simulated Annealing g ol el ;J C,I= + + g=El, rag F4l4ql ,l
= = E a o l 4 . "l "*Hql^l= tr+ac oJele + ddlq -Jialg "Jdl E=El, "JE € aJ+ aq cl dsEl +e 6J+ *g Tlzl= E+ <lE-g 6Jtl Pl ol=ol:1, "J.J d|+ ri5-"1 qdjlq *5lEJ4F_ + E ++= ol+6lq "J+ Eol €ioJosr4, zl+' ;l 4ol "lU aes r1-=-r11 6lq ++ 44Alql ^l e qg + 9141 dll =El. 499 Simulated Annealing I 7le Algorithm g +4{ ,i.l 4.
(1) +g ^149s 7 el "Jel I ^l zl B+ al
= 1, e dq'J4.
T < - T o , i r - 7 o
Q) ^14 E+ al=g ^l+6lq 6J+a\ fl.i)
= 4l-tFJ4.
E <- fl;;)
G) k = 1, ... , k, el {}+q1 rl;il T 7l + e q = q
1u1 ,,.NE-S Ef rt5 7 = tq+o (b) r"l "ilEJ"}= il+<fg 4lt}6la
E'<- fl;')
(c) 4€.6Ji€ +6J^l A Ar+"l] tr+4 x 1 . - x ' , E < - E
(d) gE T A ,JL ^l7Jq.
T \ k + l ) < - c x f l i ) , 0 ( c ( 1
Computer Graphics Society Initial Guessinc
via User lnterfac-e
57
Forward Dynamic AlE40lf,E 0ltEt d#El f.ilEl 0llLl0ll0l{!
@) x 71 44 d+ tt5"1 j1, E zl :t 424 El+ <i.l 4.
Simulated Annealing9 ^l+;J ol E^fl dg + :ll zj 3,1 4tlg *=rll eel = ^l ,Jol q+ 94 ,J { E } = a . 1 4 . E e E + a € q o l d n l + 6 J ^ l a .rl gg €6Jg +=rll, ol al + E^IdE9 _=9;lzl 95lq EJi Zltl ^l ,J, + ^l g4ol € ^l Zg €ol E+ 6lir, E+ ^l*zlzl .J+E ee,l 6l9gss + n l 4 ; 1 4 i l 9 g j r . X l 4 . r 4 3 l q o l { 1 9 * = +
^ l r s r e g + g ^ l 7 J 4 . r E 6 J q l q ' l . l €ql 9lq
^ l = 7 l * 3 1 4 < I t g , s + a o l o l q n * e . a l o l
;l 4^l .ll Tlrl+ 4+, ++61 +g dis4l Eol€"J
+ 9l+.
6 . g g q l
6.1 Elg +^l9l
o l q l = r e 10 ql + 44+ 9=rll, +^19
€ - " J 4 q g F d i l i l + 4 d q l = q 7 1 9 , ? ^ 1 9 z l ' 1 ' E g 9 s E l 4 t i e q , + 4 d " 1 E q T l + z l "J-3 4zl "J +qlE ' 1 '
E g B q o t € E l = a o l E l . o l aol !L6l+9 ^lEd.l 9q g}E "24e1 7 1 , 4tll7lE" qle+el zlol de ol a+ Hl + EJ+7I t El+/ag :l4 'Je 'J€6J zl 9€ zI4 + 914=
' r l o l t r } . o l z l " J €gg dl d€ rsr4"J 7l Hg ^l 8+ tll€ tt= 'JBg qfirtl {}E}. ol EalEg €
,l I610l Simulated Annealing 7l B ol ^I+q fi o
Ll, +eEJ Bl d€ o_a:zrll "J 7l HE g+61 tszl aJ+.
rB 10. "l€i^19 ollLlEilol .€
6 . 2 A l g E g 0 { ^ {
q l + o l r l E l l o l €
ol ql= rB u ql +4+ 9l=EJl, ^l+q +el 6l+ +aql + 16 7tl el +s+ =+9 Tlrl tl+"rl ^1, =+9 6Jg ^ilq B+.a Tlrl a+E "tl ul ulol ,!ol r|. ol +alEg 571 96lq El C€ "J A ^ l ; I B " l ^ l + 9 i s q , a 7 l 9 Z { l 5 + e ^ } + zlTl "Jq+4. BE ^l+E +d6l ^l 9]= trEll=
,1 "+ dJ+e €n, ol el 6J E-+g R]+^l 7l = =+
.J9 3l "l 6J+= Hl t€ *c4 .l^l *.1 .I= a
" l E , t . o l e l .J . l q ' l o l del Hl + d J + € z l t 6 l = E l ts Sparc Classic 4l r.l + 2 Bol 4.9€tr1. + :l,c
^ l ag ^l+4E "Jq"l "l+ "*.1 =l*€4. r?9
=+g ^!ol €tlql 44 tr61=Lll, a4!"1 ^-l 9g
^l .l €++ Bg *+6Jg .lln 91*9 *+tr}.
7 . e E
Forward dynamic simulation9 e+El rellE otl Ll Elol €ql ^l+61= 7l-^J =ezl .J ol += d+
+ = " l q o l o l € g 7 l ; 6 } / l r I i z l 4 E " l 4 . + 6 1 B l z l g 4 S l g 5 g " J r l 4 S l 7 l + + + = 9 " I q ' t l ol €g ^l+6lq tEq rlzl "il= €rJol +7'l g=
4. :lzl 4 tsq+C ^l+dlq forward dynamic simularion 9 6J a+ ^l g4ol ^d ^l Aol 9-4 AA 4. "l ag ol+ *g ^lael +gs Fzlel Erl=
n e J 6 l T i 4 E . l 4 . a 4 4 q s + g = F z l g r " J B EIg ^l A"J tr5171 q.J"J + 9.lsss, =81 tsl zlg4"J 5lzl9 .lul otl ol €q ilq^l 7l +49 ol +"J .ilq'lold sEl= €{l €+ol g + 9.1= a ol tr}. IL6J S5-g 4lq6l= 7l Bol €Eq zl = ol += ++"rl ++ 41 4dlol y*71 419o1 Q. :.zlu|
El zlg4"J g*'ol gt.J€ "ilq'lol €9 6171 96ll llE forward dynamic simulation ol 9i4..l 4.
Forward dynamic simulation9 ^l+,-lq zlF 7lc 714. jZnl €-nlg olqltl ol€6J uli, q! +=
.l,{l ^Iq= alZTlTl +3-614. = =+ ^]49 zl +6lqt20l 6Jg "J5ol '1= ^lol 7l E os g A+,
3 + t l a " J e g C " J e l 'J 4 o l + , = + E q + e
" J r l O D E E € q o l 6 l E s u l C 6 J o l € 4 . . l , l g
, .):
. 4 . : t . ,
Computer Graphics Society 58
++ 'l +€ 716l+9 rq6lE trJ+ El dl ri€oJ
*€ g= 3|ol forward dynamic simulation 4l oJ
e s l q 4 l E l . c € + e t r 3 i++= 4lol?g ^l+
;lq 'Jgq forward dynamic simulationB 4+122) g q o l e E l H l C € o l E l . " l * B e I i z l z l * B I + ? J € E I E E j 1 9 l + . o J 4 " l d l t € " J + +
a 4 c e E l + + = . q g a o l + + + 4 4 i l = Y + o l zlzl_r. Xlcl. *sEq €+ *6*? El+:- 919
forward dynamic simulation g ^l+i'J oNrluNol ! 7l B ^lzlzl= ^-l s Eli6lq ol € *B"l EJ+ E
c 4 " J z l E + g 8 - l = a o l 4 .
8. gr E^d
[lJ Armstrong, W., Marsland, T., Olafsson, M. and Schaeffer, J., Solving Equations of Motion on a virtual tree machines, SIAM J. SCI. Stat. Computing, vol 8, no 1, Jan 1987.
t2l Baraff, D., Analytical methods for dynamic simulation of non-penerating rigid bodies, Computer Graphics, vol23, July 1989.
[3] Baraff, D., SIGGRAPH '93
Course Notes 60, Chapter Rigid Body Simultion. ACM, 1993.
t4l Baraff, D., Fast contact force computation for nonpenerating rigid bodies, Computer Graphics, vol 28, July 1994.
[5] Baumgarte, J., Stsbilization of constraints and integrals of motion in dynamical systems. Computational methods in applied Mechanics and Engineering, pages l-16, 1972.
[6] Cohen, M., Interactive spacetime control for animation. Computer Graphics, 26Q):293-302, July 1992.
17) Craig, J., Introduction to Robotics Mechanics and Control Addison-Wesley, Reading, MA, 1986.
t8l Cremer, J., An Architecture for Genetal Purpose Physical System Simulation - Integrating Geometry, Dynamics, and Control. PhD thesis, Cornell University, 1989.
[9J Hahn, J., Realistic animation of rigid bodies.
Computer Graphics (SIGGRAPH '88 Proceedings), 22Q)t2W-308, August 1988.
[10] Kass, M., and Miller G., Rapid, stable fluid dynamics for computer graphics,
Computer Graphics, vo\'24, no 4, Aug.
r990.
[1i] Ingerber, L., Simulated Annealing : Practice versus Theory, Mathematical Compt.
Modelling, vol 18, no 11, pp 29-58, 1993
[12] Lasdon, L., Fox, R., Ratner, M., Nonlinear Optimization using the Generalalized Reduced Gradient Method, Department of Operations Research, TR 325, Case Western Reserve University, October, 1W3.
[13] Lasdon, L., Waren, A., GRG2 User's Guide, i989
[14] Lee, P., Wei, S., Zhao, J., Badler, N., Strength Guided Motion, Computer Graphics, vol 24 no 4, pp 2,53-263, August 1990.
t15l Luenberger, D., Linear and Nonlinear Programming, Addison Wesley, Reading MA., 1994.
[16] McKenna, M., Zeltzer, D., Dynamic Simulation of Autonomous Legged Locomotion, Computer Graphics, vol 24, no 4, pp29-38, August 1990.
L17J Miller, G., The Motion Dynarnics of Snakes and Worms, Computer Graphics, vol 22, no 4, pp 169-178, August 1988.
t18l Pandy, M., Zajac, F., Sim, E., Levine, W., An optimal control model for maximum - height human jumping.
Joumal of Biomechanics,
2 3 ( 1 2 ) : 1 1 8 5 - 1 1 9 8 , 1 9 8 8 .
[19] Park, J., et al., Motion Control using Extended
Generalized Coordinate
Transformations, 3rd Eurographic Workshop on Animation and Simulation, Sept. 1992, Cambridge,
U.K.
[20] Park, J., et al., Realistic Animation using Musculotendon Skeletal Dynamics and Suboptimal Control, 3rd Eurographic Workshop on Animation and Simulation, Sept. 1992, Cambridge, U.
K.
tzl) Park, J., et al. Following Footprints of Reality. In Pacific Graphics '93,1993.
122) Park, J., et al. Motion Control using Suboptimal Control Technique, KITE Journal of Electronics Engineering, vol 5 . , n o 1 , June 1994.
[23] Phillips, C., Zhao, J., Badler, N., Interactive
59 Computer Graphics Society
Forward Dynamic {tailol{58 olt* =#El frfiE oilq0|101{!
Realtime Articulated Figure Animation using Multiple Kinematic Constraints, Computer Graphics, vol 24, no 2, pp
u5-'80, rg,en.
l24l Platt, J., Terzopoulos, D., Fleischer, K., and Barr, A., Elastically Deformable Models, SIGGRAPHSS Course Note,
"Developments in Physically Based Modeling," SIGGRAPH 88.
[25] Powell, M., VFO2AD User's Guide, 1978.
Press, W., Flannery, B., Teukolsky, S., W., Vetterling, Numerical Recipes, Camgridge Press, Cambridge, U.K., 1986.
Raibert, M., Hofuins, J., Animation of Dynamic Legged Locomotion, Computer Graphics, vol 25, no 4, pp349-358, July, 1991.
[28] Rosen, B., Function Optimization based on Advanced Simulated Annealing, unoublished.
van de Panne, M., Fiume, E., Vranesic, 2., Reusable motion synthesis using State-space Controllers, Computer Graphics, vol 24, no 4, pp2'25-2U, August 1990.
van de Panne, M., Fiume, M., Vranesic, 2., Control Techniques for Physically Based Animation, 3rd Eurographic Workshop on Animation and Simulation, 1992.
Thomas M. and Tesar, D., Dynamic modeling of serial manipulator arms.
Transactions of the ASME, 104:218-228, Sep. 1982.
[32] Watt, A. and Watt, M., Advanced Animation and rendering techniques, Addison Wesley, Reading, MA, 1992.
[33] Wejchert, J. and Haumann, D., Animation Aerodynamics, Computer Graphics, vol25, no4, July 1991.
[34] Witkin, A., Kass, M., Spacetime Constraints, Computer Graphics, voll 22, no 4, pp 159-168, August 1988.
Zajac. F., Muscle and tendon : Properties, models, scaling, and applica tion to biomechanics and motor control.
Critical Review in Biomedical Engineering, 17(4), 1989.
Zhao, J., Badler, N., Realtime Inverse Kinematics with Joint Limits and
Spatial Constraints, MS-CIS Universify of Pennsylvania, 1989.
ao-no January,
lzsl
t30l 1261
t27l
t35l
t36l t31l
Computer Graphics Society 60