Numerical Analysis on the Flow Field around Tiller Rotor for Soil Improvement in Coastal Fisheries
9
0
0
전체 글
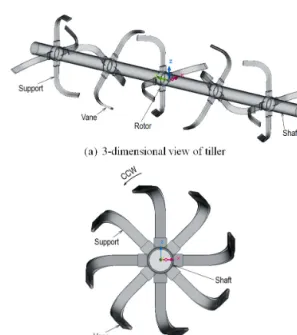
(2) 김장권 ․ 오석형. 개선을 위해 선박에 매달아 해저토양을 갈고리. 해저경운기를 해석하기 위한 기하학적 형상과 크. (hook)로 긁어 뒤집으면서 노즐로 해수를 분사하. 기를 나타내는 그림이다. 여기서 해저경운기는 회. 는 경운기를 발명하였다. 또 Kwoun 등3)과 Kim 등4). 전로터를 중심으로 입구로부터 약 3.39 m, 출구로. 은 갈고리를 이용하여 해저오염물을 효율적으로. 부터 약 5.43 m, 좌우 벽면으로부터 약 3.03 m, 그. 수거하는 연구를 한바가 있다. 또한 저자들5)도 해. 리고 해수면으로부터 수직으로 5.3839 m가 각각. 저 연안어장의 토양을 효과적으로 경운하기 위해. 떨어지도록 직사각형으로 에워쌓았다. 또 해저경. 서 갈고리 방식이 아닌 깃(vane)이 달린 다수개의. 운기는 Fig. 2와 같이 5개의 로터로 구성되어 있. 회전로터(rotor)와 로터덮개를 갖는 경운기를 선박. 으며, 각 로터는 축(shaft)에 연결된 4개의 지주. 후미에 매달아 사용할 수 있도록 고안하여 경운. (support) 끝에 깃을 갖는 구조이며, 로터의 직경은. 기의 로터가 수중에서 회전할 때, 경운기 주변에. 0.4866 m이고, 경운기의 폭은 1.85 m이다.. 서 확산 발달되는 속도분포들을 수치 해석한 바 가 있다. 한편, 기 발표한 경운기5)를 실제 연안어장에서 운용했을 때, 부력제어가 용이하지 못하고, 흔들 림이 심해 효과적인 경운작업을 할 수 없었기 때 문에, 이번 연구에서는 로터덮개를 제거한 상태에 서 로터 주변에서 발달하는 속도분포들을 분석하 고, 동시에 경운기의 부력과 견인력을 파악하고자 상용소프트웨어인 SC/Tetra(ver.12)6)를 이용하여 3 차원, 비압축성, 정상상태에서 수치해석을 하였다. 또 이번 연구에서 사용한 난류모델은 표준 k-ε 난류모델을 수정한 Realizable(이하 RLZ라고 함) k-ε6)을 사용하였다.. Fig. 2 Geometry configuration of tiller. Fig. 1 Geometry configuration for analyzing model. 2. 수치해석 2.1 해석모델5) Fig. 1은 이번 연구에서 채택한 회전로터방식의. Fig. 3 Mesh configuration for numerical analysis. 한국동력기계공학회지 제21권 제5호, 2017년 10월 21.
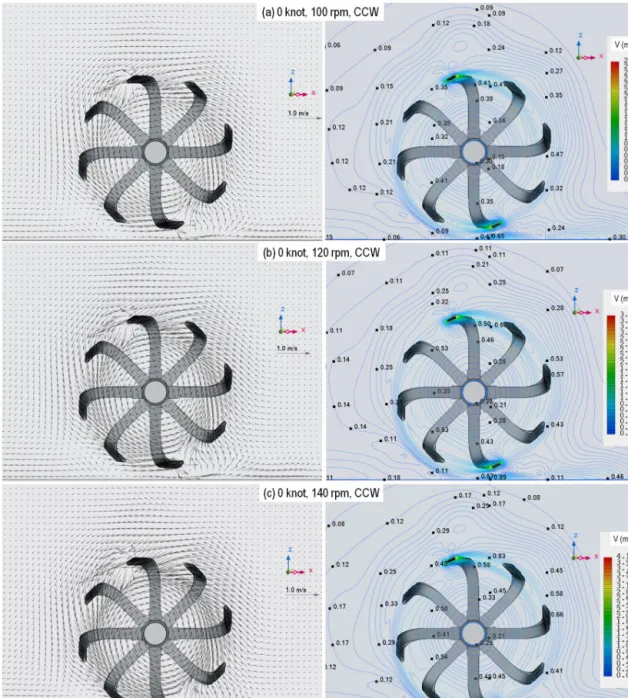
(3) 연안어장의 토질 개선을 위한 경운기 로터 주변의 유동장에 대한 수치해석. Fig. 3은 Fig. 1의 계산영역을 위해 만든 X-Z 단. 3. 해석결과 및 고찰. 면의 한 격자(mesh)형상을 나타낸다. 이것은 상용 소프트웨어인 CATIA(V5R18)를 사용하여 모델링. 3.1 정지해류에서 속도분포 비교. 하였으며, 또 SC/Tetra의 전처리 기능을 이용하여. Fig. 4는 정지된 해류의 X-Z평면에서 로터의 회. 경계조건들을 부여한 다음, "Octree"기능을 이용하. 전수별로 수치 해석한 벡터분포와 속도의 절대크. 여 격자를 만들었다. 여기서 회전로터로 갈수록. 기분포를 나타낸 그림들이다. 여기서 로터의 회전. 격자크기를 세분화하여 깃의 최소격자크기는 약. 은 반시계방향이며, 해석 단면은 Y방향의 정중앙. 0.75 mm가 되도록 하였다. 최종적으로 격자의 총. 에서 0.145 m 떨어진 위치로서 로터의 깃 끝 부근. 요소(element) 수는 약 3293만개가 만들어졌으며,. 에 해당한다. 각 회전수에서 얻어진 속도크기는. 특히 회전부에 약 91%가 집중되도록 하였다. 또. 원주 속도가 가장 큰 깃 끝 부근에서 가장 크게. 로터와 해저바닥벽면에는 해의 수렴성을 높이기. 나타나고, 로터의 안쪽으로도 반시계방향으로 회. 위해서 모두 2개의 프리즘층(prism layer)을 삽입. 전하는 유동분포를 보이며, 회전수 증가에 따라. 하였다.. 그 크기는 뚜렷이 증가한다. 또한 각 회전수에서 로터에 가까울수록 정지된 해류는 로터의 회전으 5). 2.2 수치기법. 로 혼입(entrainment)이 발생되어 반시계방향으로. Fig. 1과 같이 이번 연구에 적용한 경계조건들. 흐르게 된다.. 을 살펴보면, 해수표면에는 대기압을 적용하였으. 한편, Fig. 5는 정지된 해류의 X-Y평면에서 로. 며, 좌우 벽면에는 Free-slip을, 그리고 해저바닥면. 터의 반시계방향 회전수별로 수치 해석한 벡터분. 에는 점착(no-slip) 조건들을 각각 설정하였다. 또. 포와 절대속도의 크기분포를 나타낸 그림들이다.. 입구와 출구벽면에는 해류속도를 달리하기 위해. 여기서 로터의 해석 단면은 로터의 축 중심을 2등. 각각 속도입력조건을 적용하였다. 한편, 로터의. 분한 위치(Z=0 m)이다. X-Y평면에서 나타낸 각 회. 회전수 변화는 실제 현장에서 실험에 반영한 시. 전수별 벡터분포는 좌우 가장자리를 제외한 로터. 계방향(CW)과 반시계방향(CCW)으로 각각 100 rpm,. 들에서 깃 끝을 중심으로 발달한 전형적인 와류. 120 rpm, 140 rpm을 사용하였으며, 상류(해류 입구. (vortex)흐름을 잘 보여준다. 이 같은 현상은 절대. 측)에서 하류(해류 출구측)로 흐르는 해류는 정지. 속도크기의 등고선이 깃 주변에서 원형형태로 밀. 상태와 1.2 knot로 각각 정하였다. 여기서 해류속. 집해 분포하는 것으로도 쉽게 알 수 있다. 한편,. 도 1.2 knot는 정지해류에서 선박이 해저경운기를. 인접한 로터의 깃에 의해 뚜렷이 발달하는 와류. 끌고 가는 속도를 고려한 상대속도이다. 또 해수. 쌍(vortex pair)은 상류보다는 하류에서 더 크게 발. 의 비중은 1.025이며, 로터의 재질은 철(Fe)로 간. 달하며, 회전수 증가에 따라 그 세기는 더 커짐을. 주하였다.. 알 수 있다. 또 기 발표한 로터덮개를 갖는 경운. 한편, 해의 제어를 위해 운동량 및 난류모델방. 기5)의 경우와는 달리 로터 가장자리에서는 뚜렷. 정식들의 대류항들은 모두 2차 풍상차분법(2nd. 하게 발달하지 못하는 와류들을 볼 수 있다. 이것. upwind scheme)으로 이산화 하였으며, 확산항들은. 은 이웃한 로터덮개 벽이 없어 깃 끝에서 발달한. 초기조건인 Accuracy weighted 기법을 사용하였다6).. 유동이 제한을 받지 못해 생긴 현상으로 판단된. 또한 압력보정방법은 SIMPLEC 알고리듬을 이용. 다. 또 정지된 해류에서 와류쌍이 상류보다 하류. 하였으며, 압력항 및 모든 변수들의 완화계수는. 에서 더 크게 발달하는 것은 로터덮개로 인해 유. 초기상태의 값들을 사용하였다. 그리고 해의 수렴. 동이 제한을 받는 기 발표한 해저경운기5)의 경우. -5. 조건은 모든 변수들의 잔류값이 1.0×10 에 도달할. 와는 달리 하류로 갈수록 유동이 더 빨리 확산 발. 때로 설정하였다.. 달하기 때문이다.. 22 한국동력기계공학회지 제21권 제5호, 2017년 10월.
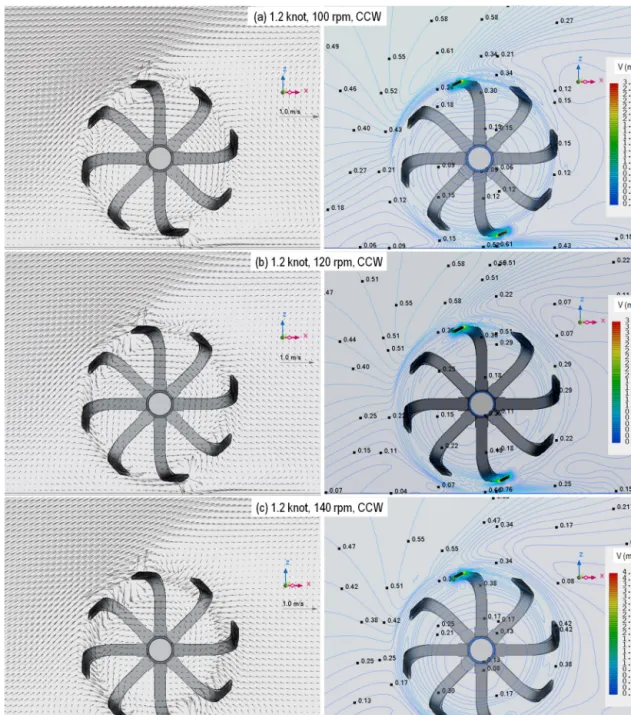
(4) 김장권 ․ 오석형. Fig. 4 Profiles of vector and velocity magnitude at Y=0.145 m in the X-Z plane (in a stationary current). 3.2 해류속도 1.2 knot에서 속도분포 비교. 나타나며, 로터의 깃 근처 벡터유동은 로터회전방. Fig. 6은 해류속도 1.2 knot의 X-Z평면에서 반시. 향과 일치하다가 로터내부 안쪽으로는 해류속도. 계방향으로 회전하는 로터의 회전수별로 수치 해. 의 영향이 더 커 정지해류와는 반대인 시계방향. 석한 벡터분포와 절대속도의 크기분포를 나타낸. 으로 회전하는 유동분포를 보이고 있다.. 그림들이다. 각 회전수에서 절대속도크기는 역시. Fig. 7은 해류속도 1.2 knot의 X-Y평면에서 반시. 원주 속도가 가장 큰 깃 끝 부근에서 가장 크게. 계방향으로 회전하는 로터의 회전수별로 수치 해. 한국동력기계공학회지 제21권 제5호, 2017년 10월 23.
(5) 연안어장의 토질 개선을 위한 경운기 로터 주변의 유동장에 대한 수치해석. Fig. 5 Profiles of vector and velocity magnitude at Z=0 m in the X-Y plane (in a stationary current) 석한 벡터분포와 절대속도의 크기분포를 나타낸. 와 맞물려 약간 더 큰 크기를 보여주고 있다. 이. 그림들이다. 각 회전수에서 로터의 깃 끝을 중심. 것은 정지해류에서는 로터의 회전에 의해 와류가. 으로 발달한 전형적인 와류쌍의 흐름은 정지해류. 주위로 충분히 확산 발달하지만, 1.2 knot의 해류. 의 경우와 달리 모든 로터에서 발견되며, 기 발표. 에서는 상류에서 하류로 흐르는 해류속도의 간섭. 한 해저경운기5)의 경우와 유사하게 상류와 하류. 에 의해 유동이 충분히 확산하지 못하기 때문이. 에서도 거의 비슷한 크기분포를 보이고 있다. 특. 다. 또 정지해류에서와는 달리 1.2 knot의 해류에. 히 로터의 각 회전수별 하류에서 발달하는 와류. 서 존재하는 로터 가장자리의 와류는 상류에서. 쌍의 확산크기는 정지해류에서보다 약간 작게 나. 하류로 흐르는 해류속도의 간섭에 의해 형성되는. 타나지만, 깃 끝 주변의 최대속도크기는 해류속도. 것으로 판단된다.. 24 한국동력기계공학회지 제21권 제5호, 2017년 10월.
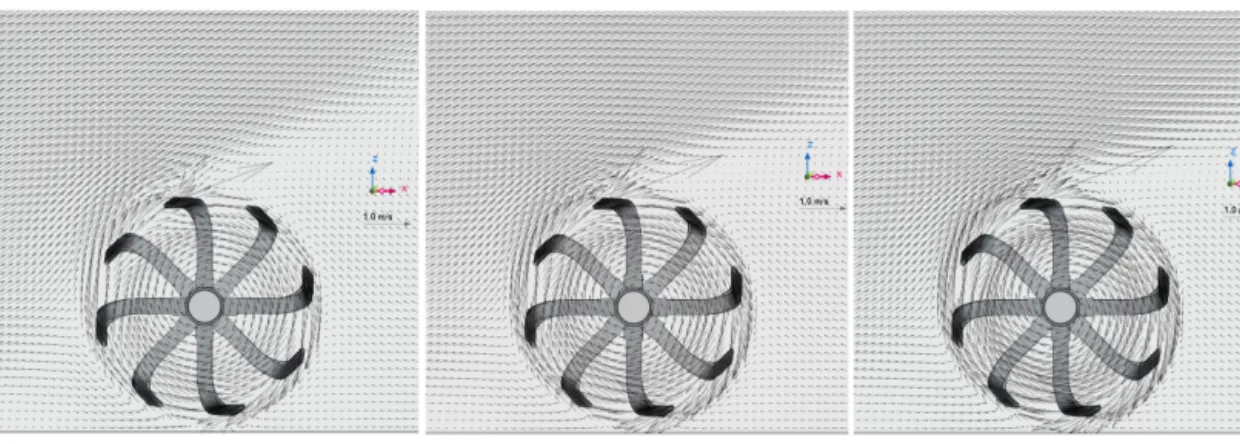
(6) 김장권 ․ 오석형. Fig. 6 Profiles of vector and velocity magnitude at Y=0.145 m in the X-Z plane (at 1.2 knots of current) 한편, Fig. 8과 Fig. 9는 해류속도 1.2 knot의 X-Z. 며, 로터 안쪽으로도 로터의 회전방향과 같은 반. 평면 및 X-Y평면에서 시계방향으로 회전하는 로. 시계방향으로 회전하는 경우(Fig. 6 참조)보다도. 터의 회전수별로 수치 해석한 벡터분포를 나타낸. 각 회전수에서 더 크게 형성되고 있다. 이것은 로. 그림들이다. X-Z평면에서 나타난 벡터분포는 역. 터의 회전방향이 유동흐름방향과 서로 일치하여. 시 로터 깃 끝 부근에서 가장 큰 속도크기를 보이. 가속현상이 발생하기 때문이다. 한편, X-Y평면에. 한국동력기계공학회지 제21권 제5호, 2017년 10월 25.
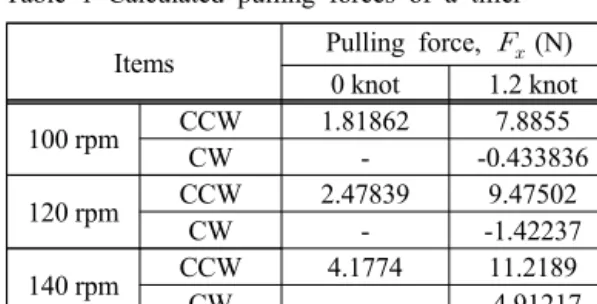
(7) 연안어장의 토질 개선을 위한 경운기 로터 주변의 유동장에 대한 수치해석. Fig. 7 Profiles of vector and velocity magnitude at Z=0 m in the X-Y plane(at 1.2 knots of current). 서 나타난 벡터분포는 로터가 반시계방향으로 회. 3.3 해저경운기의 견인력 및 부력. 전하는 Fig. 7의 경우와는 달리 로터 깃 근처에서. Table 1과 Table 2는 정지해류와 1.2 knot의 해. 존재하는 와류쌍을 보여주나 그 존재가 뚜렷하지. 류에서 회전로터의 회전수별로 그리고 회전방향. 않고, 확산 크기 역시 매우 작음을 보여준다. 이것. 별로 수치 해석한 경운기의 견인력( )과 부력. 역시 로터의 회전방향이 유동흐름방향과 서로 같. ( )을 각각 나타낸 표들이다. 여기서 반시계방향. 아 유동이 가속되므로 로터 깃 끝 부근에서 발달. 으로 회전하는 경운기(로터)를 해류상류 쪽으로. 한 와류쌍이 주변으로 충분히 확산되지 못하고. 끌 때 작용하는 견인력은 해류의 속도변화에 따. 붕괴하기 때문으로 판단된다.. 라 그리고 회전수 증가에 따라 각각 증가하는 경 향을 보인다. 특히 1.2 knot의 해류에서 견인력은. 26 한국동력기계공학회지 제21권 제5호, 2017년 10월.
(8) 김장권 ․ 오석형. Fig. 8 Vector profiles at Y=0.145 m in the X-Z plane(at 1.2 knots of current) 각 회전수별로 정지해류의 경우보다 약 3~4배 더. 음(-)의 크기를 보여 해저 쪽으로 누르려는 경향. 큼을 알 수 있다. 반면, 시계방향으로 회전하는 경. 을 보이고 있다. 그러나 해류가 1.2 knot로 흐를. 운기의 견인력은 회전수 증가에 따라 모두 음(-). 때 시계방향으로 회전하는 경운기의 부력은 회전. 의 크기를 보여 견인력이 상류 쪽으로 작용함을. 수 증가에 따라 정지해류일 때와 비슷한 크기들. 의미하므로, 반시계방향으로 회전하는 정지해류나. 을 보여 해수면쪽으로 상승하려는 경향을 보이고. 1.2 knot의 해류에서보다도 훨씬 힘이 들지 않음을. 있다. 전체적으로 볼 때, 경운기의 부력은 로터 내. 알 수 있다.. 측의 유동방향이 로터의 회전방향과 같으면, 해수. 한편, 정지해류일 때 반시계방향으로 회전하는. 면 쪽으로 작용하고, 그렇지 않으면 해저 쪽으로. 경운기에 작용하는 부력은 회전수 증가에 따라. 작용하고 있다. 이것은 로터 내외 측에서 형성되. 약간 증가하여 해수면 쪽으로 상승하려는 경향을. 는 유동속도의 크기차이로 인해 발생하는 정압력. 나타내지만, 해류가 1.2 knot로 흐를 때에는 모두. 차에 기인되어 나타난 현상으로 판단한다. 한편,. Fig. 9 Vector profiles at Z=0 m in the X-Y plane (at 1.2 knots of current) 한국동력기계공학회지 제21권 제5호, 2017년 10월 27.
(9) 연안어장의 토질 개선을 위한 경운기 로터 주변의 유동장에 대한 수치해석. 해저경운기의 부력은 실제 현장에서 적용할 때,. 2) 정지해류나 로터가 시계방향으로 회전하는. 해저토양층에 경운기가 박히거나 부상하는 문제점. 해류속도 1.2 knot에서는 가장자리를 제외한 로터. 을 고려해야 하므로, 정지해류에서는 로터의 회전. 들의 깃 끝 부근에서 전형적인 와류쌍이 나타나. 방향에 관계없이 부력이 비교적 작아 무리 없이. 며, 그 세기는 로터회전수 증가에 따라 커진다.. 사용할 수 있지만, 해류가 존재할 때는 경운기를. 3) 반시계방향으로 회전하는 로터의 회전수 증. 시계방향으로 회전시켜 사용해야 함을 알 수 있. 가에 따라 해저경운기의 견인력은 더 증가하며,. 다. 특히 로터 회전수를 100 rpm 이하에서 운영할. 해류속도 1.2 knot에서는 정지해류에서보다 약 3~4. 경우, 매우 작은 부력이 예상되어 해저경운기를. 배 더 크다.. 효율적으로 사용할 수 있을 것으로 판단된다.. 4) 해류가 1.2 knot로 흐르고, 로터가 시계방향 으로 회전할 때는 해저경운기의 견인력이 로터의. Table 1 Calculated pulling forces of a tiller Pulling force, (N). Items 100 rpm 120 rpm 140 rpm. CCW CW CCW CW CCW CW. 0 knot 1.81862 2.47839 4.1774 -. 1.2 knot 7.8855 -0.433836 9.47502 -1.42237 11.2189 -4.91217. Table 2 Calculated buoyancy of a tiller Buoyancy, (N). Items 100 rpm 120 rpm 140 rpm. CCW CW CCW CW CCW CW. 0 knot 2.29996 3.87973 5.0781 -. 1.2 knot -0.765809 3.14161 -2.66878 3.39638 -4.44471 4.22423. 4. 결 론 로터만을 갖는 해저경운기를 수중에서 일정 속 도로 회전수와 회전방향을 바꿨을 때 발생하는 벡터 및 속도크기의 분포를 3차원, 비압축성, 정 상상태에서 RLZ k-ε의 난류모델로 수치 해석한 결과는 다음과 같다. 1) 해류속도변화 및 로터회전방향에 관계없이 각 로터회전수에서 형성된 해류의 속도크기는 로 터 깃 끝 부근에서 가장 크게 나타나며, 해류속도 1.2 knot에서만 반시계방향으로 회전하는 로터내부 의 벡터흐름이 시계방향으로 나타난다.. 28 한국동력기계공학회지 제21권 제5호, 2017년 10월. 회전수에 관계없이 상류 쪽으로 작용하므로, 힘은 들지 않는다. 5) 해저경운기의 부력은 해류속도에 관계없이 로터 내측의 유동방향이 로터의 회전방향과 같으 면 해수면 쪽으로 작용하고, 그렇지 않으면 해저 쪽으로 작용한다.. References 1. N. A. Lybeck, 1913, "Submarine Cultivator and Harvester", US Patent No. 1079182. 2. D. S. Mok and S. H. Mok, 2007, "The Seabed Soil Improver (In Korean)", Korean Patent No. 10-0714056, Korean Seabed Environment Co., LTD. 3. C. H. Kwoun et al., 2004, "A Study on the Improvement of a Hook for the Collecting of Marine Wastes on the Seabed", Journal of the Korean Society of Marine Environmental Engineering, Vol. 7, No. 4, pp. 180-184. 4. J. H. Kim et al., 2012, "Study on Linking a Submerged Marine Litter Collection Project to a Marine Environment and Resources Investigation Project", Journal of the Korean Society of Marine Environmental Engineering, Vol. 15, No. 1, pp. 54-65. 5. J. K. Kim et al., 2017, "Numerical Analysis on Velocity Fields around Seabed Tiller for the Improvement of Seabed Soil", Journal of the Korean Society of Power System Engineering, Vol. 21, No. 2, pp. 48-56. 6. SC/Tetra(Version 12), 2015, User's Guide, Software Cradle Co., LTD..
(10)
수치

+4

관련 문서
