MISO 고차 ARX 모델 기반의 MIMO 상태공간 모델의 모델인식: 설계와 적용
원왕연·윤지은·이광순†·이봉국*
서강대학교화공생명공학과
121-742 서울시마포구신수동 1
*LS산전연구소
431-080 경기도안양시동안구호계동
(2006년 11월 20일접수, 2006년 12월 21일채택)
Identification of MIMO State Space Model based on MISO High-order ARX Model:
Design and Application
Wangyun Won, Jieun Yoon, Kwang Soon Lee† and Bongkook Lee*
Department of Chemical and Biomolecular Engineering, Sogang University, 1, Shinsoo-dong, Mapo-gu, Seoul 121-742, Korea
*LS Industrial System Co., Ltd., Hogye-dong, Dongan-gu, Anyang, Gyeonggi 431-080, Korea (Received 20 November 2006; accepted 21 December 2006)
요 약
부분최소자승회귀, 균형잡힌 realization, 균형잡힌 truncation을결합함으로써, MIMO 상태공간모델의모델인식
을위한효과적인방법이개발되었다. 개발된방법에서 MIMO 시스템은고차 ARX 모델로표현되는다중 MISO 시
스템으로분해된다. 이때, ARX 모델의파라미터는부분최소자승회귀에의해추정된다. 그후, realization을통해각
각의 MISO ARX 전달함수에대한 MISO 상태공간모델이만들어지며, MIMO 상태공간모델로결합된다. 최종적으
로, 균형잡힌 realization과균형잡힌 truncation을통해최소의균형잡힌 MIMO 상태공간모델이얻어진다. 제안된
방법은고압 CO2용해도측정실험장치의온도제어를위한모델예측제어의설계에적용되었다.
Abstract −An efficient method for identification of MIMO state space model has been developed by combining par- tial least squares (PLS) regression, balanced realization, and balanced truncation. In the developed method, a MIMO system is decomposed into multiple MISO systems each of which is represented by a high-order ARX model and the parameters of the ARX models are estimated by PLS. Then, MISO state space models for respective MISO ARX trans- fer function are found through realization and combined to a MIMO state space model. Finally, a minimal balanced MIMO state space model is obtained through balanced realization and truncation. The proposed method was applied to the design of model predictive control for temperature control of a high pressure CO2 solubility measurement system.
Keywords: Identification, PLS, Balanced Realization, Balanced Truncation, Model Predictive Control
1. 서 론
현대의고급제어기는모델기반제어기법으로이산시간상태공 간모델을탑재하며그성능은공정모델의정확성에의해결정된다.
하지만일반적인화학공정은복잡한구조로설계되어공정이지니 는동특성을물리법칙을이용하여모델링하기란쉽지않다. 따라 서화학공정의모델기반제어기설계에서는실험을통한모델인식 과정을통해경험적모델을결정하는방법을일반적으로취한다.
실험적으로공정모델을얻기위한대표적인방법은 1970년대말
에 Ljung에의해서일반화된예측오차방법(prediction error method)과
1990년대초에제안된부공간모델인식방법(subspace identification method) 이다[1]. 이중예측오차방법은 parametric 방법을대표하
는것이다. 기본적으로단일입출력(SISO)(혹은다중입력단일출
력(MISO)) 모델을대상으로하며예측오차를최소화하는모델파
라미터를결정하기때문에적은양의측정데이터로도상대적으로 정확한모델파라미터를구할수있다는장점을가진다. 한편, 부공
간모델인식방법은 nonparametric 방법에속하는것으로, 비반복적
인방법을사용하기때문에항상수렴가능하며, QR과특이치분 해만을사용하기때문에수치적으로안정하며균형잡힌다중입출
력(MIMO) 상태공간모델을찾아주는특징을갖는다[2, 3]. Van
Overschee와 DeMoor에의한 N4SID가가장유명하며, 이들의기여 이후부공간모델인식방법의이론과적용에대한많은연구가수
행되었다[4-8]. 그러나부공간모델인식방법은닫힌루프데이터를
†To whom correspondence should be addressed.
E-mail: [email protected]
이용하는경우편의(biased)된모델을추정하기때문에, 불안정하여 열린루프상태로모델인식실험을할수없는위험한공정에대해 서는모델인식이어렵게된다. 또한최적화개념에의한모델추정
방법이아니기때문에동일한정밀도의모델을얻기위해서는예측 오차방법에비해많은데이터가필요하다는단점을지닌다.
공정모델의차수가실제공정의차수와같은경우, 공정입력이 공정을충분히여기시키지못하면공선성(collinearity)에의한 ill-
conditioning으로시스템파라미터추정과정에서발산하거나잘못
된결과를초래할수있다. 특히 MIMO 공정은풍부한신호정보
를갖도록공정을여기시키기어렵기때문에공선성에의한문제 가발생할가능성이높아진다. 한편, 공정모델의차수가실제공정
의차수보다큰경우, PRBS(pseudo random binary sequence)와같 이다양한주파수의정보를갖는신호를입력하더라도공정입력 과출력사이의상관관계로인해항상공선성에의한문제가발생 하게된다.
공선성에의한문제를해결하고적은양의데이터로최적의공정 모델을얻기위해, 본연구에서는기존에개발된여러기능들을조 합하여상업적으로신뢰성있는모델인식시스템을개발하였다. 주
성분분석과다중회귀의특징을결합한부분최소자승회귀(partial
least square regression)를도입하여다중공선성(multi-collinearity)
에의한파라미터추정문제를 해결하고, 균형잡힌(balanced)
realization과균형잡힌 truncation을통해모델차수를감소하여최 소의(minimal) 균형잡힌 MIMO 상태공간모델을얻었다.
2. 모델인식 방법의 설계
현대고급제어기는모델기반제어기법으로서공정모델의정확 성에의해그성능이결정되므로, 가능한공정을잘표현할수있도 록모델링하는일은매우중요하다. 이를위해다음의항목들을순 차적으로수행하도록모델인식방법을설계하였다.
▶단계 1: 데이터전처리.
▶단계 2: MIMO 공정을 MISO 공정으로분해.
▶단계 3: 단계 2 에서결정된각 MISO 공정에대해고차 ARX 전 달함수로표현하고부분최소자승회귀를사용하여파라미터를추정.
▶단계 4: MISO ARX 전달함수를관찰가능한표준형상태공
간모델로변환.
▶단계 5: MISO 상태공간모델을비최소의(non-minimal) MIMO
상태공간모델로결합.
▶단계 6: 균형잡힌 realization과균형잡힌 truncation을통해최
소의균형잡힌상태공간모델로차수감소.
위의각단계의내용을상세히설명하면다음과같다.
2-1. 데이터 전처리및공정분해
좋은모델인식결과를얻기위해데이터를전처리하는과정이필
요하다. 이를통해이상치(outlier)를제거하고모델링에포함되기원
하는주파수영역을강조함으로써, 알려지지않은편의된변수에의 한문제를최소화할수있다. 이를위해, 본연구에서는식(1)과같
이입력과출력데이터의편차를취하여편의를제거하고, 파라미 터추정조건을향상시키기위해표준편차로나누어입출력데이터 를정규화(normalization)하였다.
(1)
여기서, ym와 um은각각측정된공정출력과입력이며, 와 는 평균이고 σy와σu는표준편차이다. 그다음, 대상 MIMO 공정을
각각의출력에대한 MISO 공정으로분해하였다.
2-2. 고차 ARX모델링과파라미터추정
ARX 모델은비선형회귀로파라미터를결정해야하는 ARMAX
모델과달리, 선형회귀방법으로간단히파라미터를추정할수있
으며, 그차수가충분히크면 ARMAX와같은복잡한모델을사용
하지않고도실제공정을잘표현할수있는장점이있다[1]. 본연
구에서는분해된대상 MISO 공정을식(2)와같이고차 ARX 모델
로모델링하였다.
여기서 i = 1, ..., ny (2)
여기서, y는공정출력, u는공정입력, e는외란이다. 그리고 n은모 델차수, nu는입력의수, ny는출력의수이다. 식(2)를 t = 1, ..., N
동안의데이터를모아서벡터로표시하면식(3)과같다. 식(3)에 서Φi와 Yi행렬은변수추정과정에서임의의초기상태설정에따 른영향이나타나지않도록구성하였다.
여기서 i = 1, ..., ny
Φi=
(3)
고차 ARX 모델은공정모델의 mis-specification으로인해발생하
는다중공선성에의해회귀문제가 ill-conditioning되어, 모델파라미 터추정과정에서발산하거나부정확한결과를초래할수있다. 이 러한다중공선성에의한문제를극복하기위해개발된방법으로주 성분회귀와부분최소자승회귀가유명하다. 이중주성분회귀는
식(4)와같은주성분분석을통해얻어진Φi의주성분을 Yi의회귀 변수로사용함으로써, 주성분의직교성을이용하여다중공선성에의 한문제를제거하는방법이다.
(4)
식(3)의회귀문제에서주성분회귀는식(4)와같이독립적으로Φi 와 Yi의주성분을분석하여이를회귀변수로이용하기때문에, 예 측변수의최적의부분집합인Φi의주성분과 Yi와의상관관계는보 장할수없다. 반면, 부분최소자승회귀는식(5)와같이 Φi와 Yi를 동시에분해하여, 두행렬사이의공분산이최대가되도록하는성
y t( ) ym( )t –y
σy
---
= u t( ) um( )t –u
σu
---
=
,
y u
yi( )t –aikyi(t k– ) bjkuj(t k– )
j=1 nu
+ ∑
⎝ ⎠
⎜ ⎟
⎛ ⎞+ei( )t
k=1
∑n
=
Yi=ΦiΘi+Ei
Yi
yi(n 1+ ) yi( ) N
= …
y– ni( ) … y– 1i( ) u1( ) … un 1( ) u1 nu( ) … un nu( )1
yi
– N 1(…– ) … y…– N ni( …– ) u1(N 1–…) … u…1(N n–…) u…nu(N 1–…) … u…nu(N n…– )
Φi [U U˜] D 0 0
D˜ VT V˜T
= ≈UDVT = UQT
분의집합을기저벡터로찾기때문에, Φi뿐만아니라 Yi와도강한 상관관계를갖도록결정된다. 이와같이Φi와 Yi모두에대해관계 를갖는성분을회귀변수로사용하여파라미터를추정하면수치적 으로안정되고통계적성질이향상되는이점이있다. 본논문에서
는 Abdi[9]의부분최소자승회귀알고리즘을이용하여식(2)의파
라미터 aik, bjk(i = 1,...,ny, j = 1,...,nu, k = 1,...,n)를추정하였다.
Φi≈ ΤΡΤ그리고 Yi≈TST (5)
여기서 S와 P는부하 행렬(loading matrix)이며, T는잠재 벡터
(latent vectors)를열로갖는점수행렬(score matrix)이다.
2-3. Realization과 MIMO상태공간모델로의결합
식(2)의 MISO ARX 전달함수는다음의관찰가능한표준형상
태공간모델로변환된다.
여기서 i = 1,...,ny, j = 1,...,nu
, , Ci= [1 0 ... 0] (6)
그리고각출력변수에대한 MISO 상태공간모델은식(7)과같이
MIMO 상태공간모델로결합된다.
여기서
(8)
2-4. 균형 잡힌 realization과균형잡힌 truncation
공정입력을제어하여시스템의상태를임의로조정할수있다면 그시스템은 “제어가능” 하다고하며, 측정된출력으로부터시스
템의상태를결정할수있다면그시스템은 “관찰가능” 하다고한
다[12]. 식(6)으로표현된 MISO 상태공간모델과같이관찰가능
하고제어가능한상태공간모델을최소의 realization이라한다. 하
지만이를식(7)과같이 MIMO 상태공간모델로결합하면관찰불
가능하거나제어불가능한상태가포함되어비최소의 realization이
된다. 또한 MIMO 상태공간모델로의결합과정에서관찰가능성
과제어가능성이균형을이루지않는불균형된상태공간모델이 된다. 여기서 “균형잡힌”란입력과상태, 상태와출력사이의연결
고리의세기가균형을이루는수치적으로안정화된상태를말하며,
제어가능성과관찰가능성이균형을이루도록하는닮은변환
(similarity transformation)을균형잡힌 realization이라한다[10]. 이때
입력과상태, 상태와출력사이의연결고리의세기는식(8)의제어 가능성함수 Lc(x)와관찰가능성함수 Lo(x)의크기에의해계산된다.
여기서 ,
여기서 , (8)
여기서 는제어가능성행렬, 는관찰가능성행렬, Gc는제어 가능성 gramian, Go는관찰가능성 gramian, n은모델차수이다. 본 연구에서는식(7)의 MIMO 상태공간모델을 X = MZ에대해균형
잡힌 MIMO 상태공간모델로닮음변환하였다. 이때변환된모델
은식(9)과같으며, 식(10)을만족하게된다. 여기서 M은 [11]의
알고리즘을참고하여계산하였다.
여기서 , , (9)
= , σ1>σ2> ... >σn (10)
위식에서 균형잡힌 MIMO 상태공간 모델의 제어가능성
gramian과관찰가능성 gramian은 Hankel 특이값을원소로갖는대
각행렬이된다. 여기서 1/σi은 i번째상태에대한입력에너지의기 여를나타내며, σi은출력에너지에대한 i번째상태의기여를나타
낸다. 균형잡힌 realization의이러한성질을이용하여균형잡힌
truncation을수행하였다. 균형잡힌 truncation은식(9)의균형잡힌
MIMO 상태공간모델에서관찰불가능하거나제어불가능한상태
를제거함으로써최소의균형잡힌 MIMO 상태공간모델을만들어
준다. 이를위해먼저식(10)에서 Hankel 특이값이급격히줄어드
는구간을기점으로Σ를다음과같이가정하였다.
(11)
식(9)의 를식(11)의Σ에대응하도록분할한뒤, 절단
하면다음과같다.
, , (12)
식(12)에서Σ2가 0에가깝고 가안정하다면 은 최소의 realization이다[14].
x t 1( + ) Aix t( ) Bijuj( )t
j=1 nu
+ ∑
= yi( )t = Cix t( )
Ai
ai1
– 1 … 0 ai2
– 0 … 0 … ain
– 0 … 0
= … … … Bij
bij1
bij2
bijn
=
…
X t 1( + ) = AX t( )+BU t( )
Y t( ) = CX t( )
Y t( )
y1( )t yny( )t
U t( )
u1( )t uny( )t
=
= …,
A A1 0 0 Any
B
,
B11… B1nu
Bny1… Bnynu
C
,
C1 0 0 Cny
= … = … …… = …
Lc( )x 1 2---xTGC–1x
=
Gc = C˜C˜T C˜= B AB ∆[ … An–1B]
Lo( )x 1 2---xTGox
=
Go = O˜TO˜ O˜= C∆[ T CA( )T… CA( n–1)T]T
C˜ O˜
Z t 1( + ) = AZ t( )+BU t( ) Y t( ) = CZ t( )
A M= –1AM B M= –1B C CM=
Gc = Go = Σ
σ1 0 … 0 0 σ2 … 0 0 0 … σn
… … ……
Σ Σ1 0 0 Σ2
Σ1»Σ2
= ,
A B C, ,
( )
A A11 A12
A21 A22
A11
= ≈ B B1
B2
B1
= ≈ C = [C1 C2]≈C1
A11 (A11, ,B1 C1)
3. 모델인식 패키지의 개발
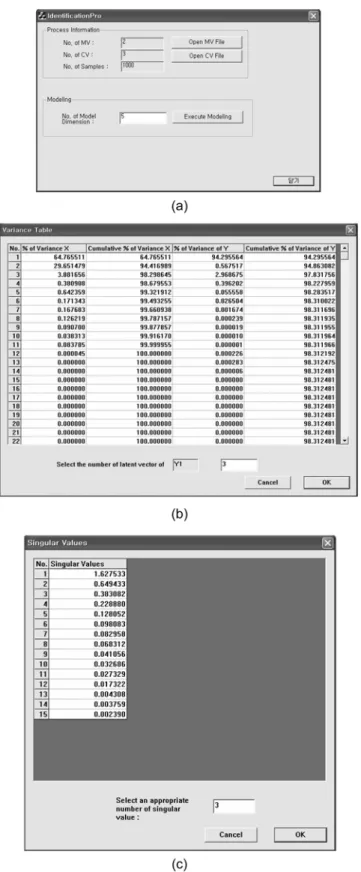
Fig. 1에설계된모델인식방법에의해 C++ 언어로개발된모델
인식패키지프로그램화면을보였다. Fig. 1(a)에서 *.csv(쉼표로분
리) 파일로 저장된 입출력 데이터와함께모델차수를 모델인식
프로그램에 입력하면, 잠시후 Fig. 1(b)와같이 잠재벡터수를 선택하는화면이나타난다. 이때공분산표를보고, 공선성을최 소화하며 Φ와 Y를잘표현하는최적의잠재벡터수를선택한다.
그러면 Fig. 1(c)와같이균형잡힌 truncation을수행하기 위해
Hankel 특이값의수를선택하는화면이나타나며, 이때적절한
Hankel 특이값수를입력하면그만큼모델차수가감소하여최종
적으로얻어진최소의균형잡힌 MIMO 상태공간모델이 A.csv,
B.csv, C.csv 파일에각각저장된다. 또한실제출력데이터와모
델을통해예측한출력데이터가 Y_Simulation.csv 파일에저장
되므로, 이를통해모델인식 결과얻어진공정모델의정확성을 평가하게된다.
4. 실 험
Fig. 2에본연구에서대상으로하는고압 CO2용해도측정실험
장치를나타내었다. 초기주어진압력하에서평형셀에 CO2기체와 이온성액체를넣어두고, 기액평형에이르렀을때평형셀내의압
력변화를측정하여기체의액체에대한용해도를계산한다. 기액 평형에이르는동안가열기를통해항온조내부공기의온도를조 절함으로써평형셀내부온도를설정치로일정하게유지하는것이 제어목적이다. 이때항온조와평형셀은자연냉각된다. 따라서대
상공정은제어기가 D/A 변환기에내려주는 4-20 mA의전류신호
를조작변수로, 평형셀내부온도를제어변수로, 외부온도변화
를외란으로구성되는 SISO 공정이다.
고압 CO2용해도측정실험장치는주어진온도하에서정확한 용해도의측정을위해, 보다정밀한온도제어를필요로한다. 또 한실험의편의를위해가능한온도가설정치에빨리도달하고안 정하게유지되어야한다. 하지만 60 bar 의고압 CO2기체를사 용하기 때문에평형셀의벽이두껍게되며, 이로인해항온조와
평형셀사이의열전달에큰동특성이존재하게된다. 또한편미분 방정식으로표현되는 분산시스템이기때문에, 상태공간 모델과 같은유한선형모델로바꾸더라도굉장히차수가큰고차공정
이된다. 이러한특징은기존의 PID 제어를통한제어성능에한
계를가져오며, 자연스럽게모델기반의예측기능을가진제어기
Fig. 1. Human-machine interface (HMI) of the developed identifica- tion package program; (a) an initial screen, (b) variance table,
(c) Hankel singular value table. Fig. 2. Process flow diagram of the concerned solubility measure- ment experimental system.
를적용하도록유도한다. 한편모델기반예측제어기는공정모델 의정확성에의해그성능이결정되므로, 실제공정을잘표현하 는좋은모델을만드는일은매우중요하다. 공정모델은설계된 모델인식방법을통해제작되었으며, 이를위한모델인식실험이
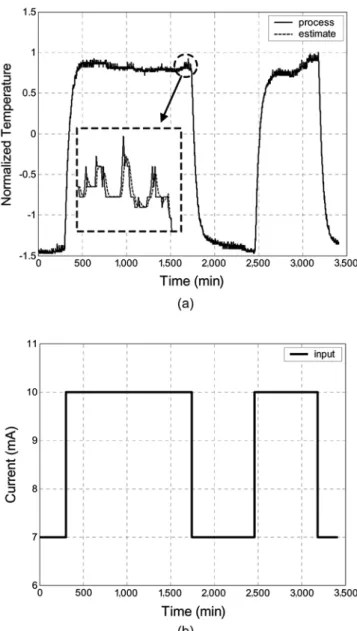
수행되었다. 상온상태의반응기에 Fig. 3(b)의 7-10 mA 크기를 갖는입력신호를열린-루프상태에서총 57시간동안입력하였
으며, 샘플링시간을 1분으로하여총 3,420개의온도데이터를
취득하였다. 이후, 설계된모델인식방법으로공정모델을제작하
여모델예측제어기에 적용하였다. 공정모델은 5차로설정하여 파라미터를추정하였으며, 모델예측제어는 Won 등[13]이설계 한제어기의기능을참고하여설계하였다. 한편, PID 제어기를적 용하여모델예측제어의운전결과와비교하였다. 이때 PID 제
어기는 Ziegler-Nichols 조율방법으로조율한후, 추가조율을통 해정밀하게조율하였다.
Fig. 3. Results of temperature prediction in the solubility measure- ment system; (a) mean centered and normalized temperature, (b) input excitation signal.
Fig. 4. Closed-loop response against a set point change under MPC and PID control; (a) trajectory of temperature, (b) process input of MPC, (c) process input of PID control.
5. 결과 및 토의
제안된모델인식방법을통해제작된공정모델을적절히설계된 모델예측제어기에적용하여고압 CO2용해도측정실험장치의 온도제어를수행하였다. Fig. 3(a)에평균을중심으로정규화된온 도측정치와설계된모델인식법을통해얻어진온도예측값을보였 다. 이그림에서설계된모델인식방법을통해구한온도예측값이
실제온도측정값을잘표현함을보인다. 이때온도예측값은 Table 1
에서 2개잠재벡터를주성분으로선택하여 T 행렬을구성한후,
식(5)로부터유도된 를이용하여계산되었다.
Fig. 4에 PID 제어와설계된모델인식방법을통해제작한공정
모델을탑재한모델예측제어기를고압 CO2용해도측정장치의 온도제어에적용한결과를나타내었다. 이때, 제어주기는 1분으로 설정하였다. PID 제어의경우모델예측제어와비교하여온도설
정치변화에대해상대적으로느린제어동작을보인다. PID 제어 는모델기반의예측기능이없기때문에제어오차가발생한후그 에따라제어동작의크기와방향을결정하게되므로, 온도설정치 에늦게도달하여안정화되는데오랜시간이걸리게된다. 또한대 상공정이항온조와평형셀사이의열전달에기인한큰동특성을 지닌고차공정이므로, 2개자유도를가진 PID 제어로는제어성능 에한계를보인다. 반면설계된모델인식방법에의해제작된 5차 공정모델을탑재한모델예측제어기는온도설정치변화에대해 좋은제어성능을보여준다. 또한모델예측제어의예측기능으로
인해제어출력이제약조건을만족하며신속히동작하여, 과도응 답을최소로하면서출력오차를빠르게상쇄하는것을볼수있다.
이로써온도가설정치에빨리도달하고안정화된다. 대상공정의경 우, 비선형성이약한공정으로단일시불변선형모델로좋은제어
성능을얻을수있었다.
6. 결 론
본논문에서는부분최소자승회귀를이용하여고차 ARX 모델의 계수를추정케한후, 균형잡힌 realization, 균형잡힌 truncation을 통해최소의균형잡힌이산시간상태공간모델을제작하는모델인 식법을설계하였다. 이후적절히설계된모델예측제어기를통해
용해도측정공정의온도제어에적용함으로써, 설계된모델인식 법을통해만들어진공정모델의성능을검증하였다.
감 사
본연구는산업자원부에서시행하는전력산업연구개발사업의일 환으로수행되었습니다. 또한 2단계두뇌한국프로그램을통한한 국학술진흥재단의재정적인지원에감사드립니다.
참고문헌
1. Ljung, L., System Identification – Theory for the user, 2nd ed., Prentice-Hall, New Jersey, NJ(1999).
2. Favoreel, W., Moor, B. D. and Overschee, P. V., “Subspace State Space System Identification for Industrial Processes,”J. Process Control, 10(2), 149-155(2000).
3. Overschee, P. V. and Moor, B. D., “N4SID: Subspace Algo- rithms for the Identification of combined deterministic-stochas- tic Systems,”Automatica, 30(1), 75-93(1994).
4. Qin, S. J., “An Overview of Subspace Identification,”Comp.
Chem. Eng., 30(10), 1502-1513(2006).
5. Chiuso, A. and Picci, G., “The Asymptotic Variance of Subspace Estimates,”J. Econometrics, 118(1), 257-291(2004).
6. Jia, C., Rohani, S. and Jutan, A., “FCC Unit Modeling, Identifi- cation and Model Predictive Control, a Simulation Study,”Chem.
Eng. Proc., 42(4), 311-325(2003).
7. Lee, K. S., Eom, Y., Chung, J. W., Choi, J. and Yang, D., “A Control-relevant Model Reduction Technique for Nonlinear Sys- tems,”Comp. Chem. Eng., 24(2), 309-315(2000).
8. Sima, V., Sima, D. M. and Huffle, S. V., “High-Performance Numer- ical Algorithms and Software for Subspace-based Linear Multi- variable System Identification,”J. Comp. Appl. Math., 170(2), 371-397(2004).
9. Abdi, H., “Partial Least Squares (PLS) Regression,”Enc. Soc.
Sci. Res. Meth., Thousand Oaks (CA), TO(2003).
10. Helmke, U. and Hüper, K., “A Jacobi-type Method for Comput- ing Balanced Realization,”Sys. Cont. Lett., 39(1), 19-30(2000).
11. Chen, C. T., Linear System Theory and Design, 3rd ed., OXFORD, New York, NY(1999).
12. Åström, K. J. and Wittenmark, B., Computer-controlled systems – theory and design, 3rd ed., Prentice-Hall, New Jersey, NJ(1997).
13. Won, W., Lee, K. S., Lee, B., Lee, S. and Lee, S., “Model Pre- dictive Control of Condensate Recycle Process in a Cogeneration Power Station: I. Controller Design and Numerical Application,”Pro- ceedings of SICE-ICASE International Joint Conference 2006, Busan, Korea, 178(2006).
14. Zhou, K., Doyle, J. C. and Glover, K., Robust and Optimal Con- trol, Prentice-Hall, New Jersey, NJ(1996).
Yˆ TS= T
Table 1. Variance of Φ and Y explained by the latent vectors Latent Vector Percentage of Explained
Variance for Φ Cumulative Percentage of
Explained Variance for Φ Percentage of Explained
Variance for Y Cumulative Percentage of Explained Variance for Y
1 91.80 91.80 94.99 94.99
2 7.78 99.58 4.97 99.96
3 0.22 99.80 0.01 99.97