논문 2012-49-12-32
레이더와 비전센서 융합기반의 움직임추정을 이용한 전방차량 검출 및 추적
( Preceding Vehicle Detection and Tracking with Motion Estimation by Radar-vision Sensor Fusion )
장 재 환*, 김 경 환***
( Jaehwan Jang and Gyeonghwan Kim )
요 약
본 논문에서는 레이더와 비전센서 융합 기반의 움직임추정을 이용한 전방차량 검출 및 추적 방법을 제안한다. 제안하는 방 법은 움직임추정을 통하여 레이더로 관측한 타겟의 부정확한 횡방향 위치를 보정할 뿐만 아니라 자차의 거동에 따른 자차-지 면 간의 기하학적 관계 변화에 적응적으로 전방차량을 검출하고 추적한다. 또한 연산량 부담이 적은 특징점기반의 움직임추정 방법을 사용하여 차량을 검증하는 과정의 수행 횟수 감소를 도모하였다. 제안하는 움직임추정 방법으로 보정한 타겟이 기존의 방법에 비해 높은 시간적 일관성(temporal consistency)을 가지고 전방차량을 추적하는 것은 물론 다양한 도로환경에서 강건하 게 전방차량을 검출하는 것을 실험을 통해 입증하였다.
Abstract
In this paper, we propose a method for preceding vehicle detection and tracking with motion estimation by radar-vision sensor fusion. The motion estimation proposed results in not only correction of inaccurate lateral position error observed on a radar target, but also adaptive detection and tracking of a preceding vehicle by compensating the changes in the geometric relation between the ego-vehicle and the ground due to the driving. Furthermore, the feature-based motion estimation employed to lessen computational burden reduces the number of deployment of the vehicle validation procedure.
Experimental results prove that the correction by the proposed motion estimation improves the performance of the vehicle detection and makes the tracking accurate with high temporal consistency under various road conditions.
Keywords : Vehicle detection, vehicle tracking, motion estimation, radar-vision fusion
Ⅰ. 서 론
전방차량 검출은 첨단 운전자 지원시스템(advanced driver assistance systems)에 속하는 차량거리 유지시 스템(adaptive cruise control system)과 전방차량 충돌
* 학생회원, ** 정회원, 서강대학교 전자공학과 (Dept. of Electronic Engineering, Sogang University)
※ 본 연구는 서강대학교 SRF와 지식경제부 산업원천 기술개발사업의 일부 지원으로 수행되었음.
접수일자: 2012년10월22일, 수정완료일: 2012년11월26일
경고시스템(forward vehicle collision warning system) 의 핵심적인 기술이다[1]. 차량검출에는 레이더(radar)와 비전센서(vision sensor)가 주로 이용된다. 단일 센서만 을 이용한 차량검출의 성능에는 제약이 따른다[2]. 레이 더는 타겟(target)과 자차(ego-vehicle) 사이의 거리측정 이 가능하지만 형태에 대한 해석의 부재로 가로수나 가 드레일 등의 객체가 차량으로 오검출될 가능성이 크다.
반면 비전센서는 취득한 영상의 해석을 통한 형태분석 이 가능하지만[3] 높은 연산시간으로 인해 실시간 동작 에 부담으로 작용한다. 따라서 최근의 차량검출에 대한 연구는 레이더와 비전의 융합을 통해 검출율과 처리속
도를 높이는 방향으로 발전하고 있다.
레이더와 비전을 융합한 차량검출은 일반적으로 아 래와 같은 단계로 설명할 수 있다.
1. 레이더로 관측한 타겟의 각도와 거리를 실세계 좌표로 변환한다.
2. 자차와 지면사이의 기하학적 관계를 통해 실세 계 좌표의 레이더 타겟을 영상평면에 투영하여 관심영역을 설정한다.
3. 관심영역에서 영상기반의 차량검증 과정을 통해 차량을 검출한다.
이 방법은 전체영상이 아닌 관심영역에 대해서만 차 량검증 과정을 수행하기 때문에 처리속도를 크게 단축 할 수 있게 해준다. 하지만 레이더로 관측한 타겟의 횡 방향 위치정보는 레이더에 내재적으로 존재하는 드리프 트(drift) 현상으로 인해 부정확하며, 자차-지면 간의 기 하학적 관계는 자차의 거동에 따라 지속적으로 변화한 다. 발생가능한 오차들을 보상하기 위해 일반적인 영상 기반의 차량검증 단계에서는 관심영역을 크게 지정하여 차량검증을 수행한다. 차량검증에 소요되는 연산시간은 단일 비전센서를 이용하는 경우보다는 짧지만 여전히 개선의 여지가 많다.
Alessandretti 등의 방법[4]은 타겟의 횡방향 오차를 보상하는 4m의 폭과 2m의 너비를 관심영역으로 설정 하고 수직에지와 대칭성을 이용하여 차량을 검증하였 다. Liu 등의 방법[5]은 영상의 전 영역에 대해 그림자 분할(shadow segmentation)과 SVM(support vector machine)을 이용하여 차량을 검출한 결과와 타겟의 관 심영역에서 Alessandretti 등의 방법[4]의 방법을 통해 차량을 검증한 결과를 교차검증(cross validation)하였 다. 이 방법은 Alessandretti 등의 방법[4]에 비해 검출율 은 증가하였지만 처리시간이 증가하는 단점이 있다.
Haselhoff 등의 방법[6]은 타겟의 관심영역을 폭 5m, 높 이 4m로 설정하고 하나의 관심영역에 2개 이상의 차량 이 포함되는 경우를 고려하여 향상된 Adaboost 알고리 즘으로 차량을 검출하였다. 이러한 기존의 연구들은 타 겟의 위치오차를 포함할 수 있을 만큼 관심영역을 확장 하고 영상기반의 차량검증만을 수행하였다.
따라서, 본 논문에서는 관심영역의 확장에 의한 연산 시간 증가를 피하고 자차의 거동에 따라 변화하는 차량 -지면과의 관계에 적응적인 차량검출 방법을 제안한다.
제안하는 방법에서는 위에서 언급한 일반적인 레이더와
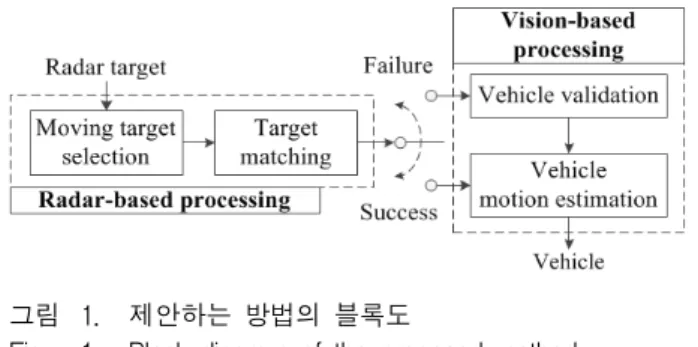
그림 1. 제안하는 방법의 블록도
Fig. 1. Block diagram of the proposed method.
비전의 융합방법에 특징점기반의 움직임추정 과정을 추 가하여 차량-지면과의 관계가 지속적으로 변하는 환경 에서 연산시간의 큰 증가 없이 타겟의 위치를 보정한 다. 움직임추정 과정의 도입을 통한 타겟의 위치보정은 차량검출율을 향상시키고 관심영역의 크기를 축소시키 는 역할을 한다. 또한 차량검증이 안정적으로 이루어지 는 경우에는 움직임추정만으로 차량을 강건하게 검출하 여 평균 처리시간을 단축할 수 있다. 실험 결과를 통해 보정된 타겟이 높은 시간적 일관성(temporal consistency)을 가지고 차량을 추적할 뿐만 아니라, 다 양한 도로환경에서 기존의 방법보다 강건하게 차량을 검출하는 것을 확인하였다.
Ⅱ. 제안하는 방법의 개요
그림 1에 나타난 것처럼, 제안하는 방법은 레이더기 반과 비전기반의 처리로 구성된다. 레이더기반의 처리 에서는 움직이는 타겟을 선정하고 이전 프레임의 처리 과정에서 검출한 차량과 정합하는 과정을 수행한다. 비 전기반의 처리는 타겟에 대한 차량검증과 움직임추정 과정으로 구성되며, 정합의 성공과 실패 여부에 따라 차량검증의 추가적인 수행여부가 결정된다.
제안하는 방법에서는 차량검증의 추가적인 수행여부 를 판단하는 근거로 연속적인 검출정도를 수치로 표현 한 신뢰도 값을 타겟에 부여한다. 또한 각 단계별로 신 뢰도 값을 갱신하고 프레임 간에 유지하여 차량을 검출 하는 근거로 활용한다[7].
본 논문에서는 현재 프레임의 번째 레이더 타겟을 수식 (1)과 같이 상태벡터 로 정의한다.
∆ (1)
는 3차원 실세계 좌표에서 관측한 위치
, 예
측한 위치 , 추정한 움직임 ∆
으로 계산한 보 정된 위치 와 신뢰도
로 구성된다. 이 후 본 논문에서는 수식 (1)에서 정의한 의 원소를 통해서 제안하는 방법을 설명한다.
Ⅲ. 레이더기반의 처리
1. 움직이는 타겟 선정
움직이는 타겟 선정은 레이더로부터 관측한 타겟의 위치 를 자차의 움직임만큼 보상하여 움직이는 타 겟과 고정된 타겟을 구분하는 과정이다. 레이더로부터 제공되는 타겟의 위치정보는 그림2(a)와 같이 실세계 좌표에서 각도( )와 거리()이다. 따라서 번째 타겟의 관측한 위치 는 수식 (2)와 같 이 계산된다.
(2) 이때 는 차량에 장착된 레이더와 지면사이의 고 정된 높이다.
는 초기화 신뢰도 을 통해서 수식 (3)과 같이 초기화된다.
(3) 자차의 움직임은 그림 2(b)와 같이 모델링[8]하고 자 차의 종방향 움직임을 보상하여 주행 중인 차량과 고정
그림 2. (a) 실세계 좌표에서 타겟의 위치관계 (b) 자차의 움직임 모델
Fig. 2. (a) Radar target position relation in the world coordinates (b) Motion model of the ego-vehicle.
된 물체(도로의 구조물, 가드레일 등)를 구분한다. 자차 의 속도 와 회전 속도(yaw-rate) 을 통해 와
∆에서의 시간 간격에서 발생한 각도 변화
∆ ∆에 대한 자차의 이동 성분 ∆와 ∆
를 수식 (4)와 (5)로 나타낼 수 있다.
∆ ∆ (4)
∆ ∆ (5) 관측한 타겟의 횡방향 위치는 드리프트의 영향을 받 기 때문에 제안하는 방법에서는 종방향 위치만 사용한 다. 현재 프레임의 자차의 종방향 움직임 ∆
과 관 측한 타겟의 종방향 움직임 ∆ 의 차 이 ∆ ∆ ∆ 가 기준 임계치 내에 있는 경우에 는 만큼 감소시킨다. 이면 움직이는 타겟으로, 그렇지 않으면 번째 타겟은 차량이 아닌 것으로 판단한다.
2. 타겟 정합
타겟 정합에서는 레이더가 관측한 타겟의 위치와 이 전까지의 추적결과로 예측한 위치를 비교하여 추적중인 타겟과 관측한 타겟이 정합되는지 확인하고 차량검증의
그림 3. 타겟 정합의 흐름도 Fig. 3. Flowchart of target matching.
추가적인 수행여부를 결정한다. 그림 3에서 보여주는 것처럼,
와 의 유클리디언 거리 (Euclidean distance) 계산 및 그 결과로 갱신된
의 값을 통해 타겟 정합의 성공 여부를 판단한다. 검증 신뢰도 임계치 은 타겟 정합에는 성공했지만 신뢰도가 낮은 타겟에 대해 차량검증의 수행여부를 판 단하는데 사용된다. 새롭게 나타난 타겟은 이전의 추적 결과가 없기 때문에 차량검증 과정을 수행한다.
Ⅳ. 비전기반의 처리
1. 실세계 좌표와 영상 좌표의 관계 및 관심영역 정합 단계를 거친 실세계 좌표의 레이더 타겟을 영상 평면에 투영하고 관심영역을 설정하여 차량검증 또는 움직임추정 및 추적 단계를 수행한다.
실세계 좌표 와 영상 좌표 간의 관계 는 × 투영 행렬(projection matrix) 를 통해 수식 (6)과 같이 표현된다.
(6)관심영역은 타겟의 실세계 좌표를 중심으로 설정한 다. 차량검증은 차량의 크기와 여백을 포함하여 2.5m의 폭과 높이, 움직임추정은 인접한 차량의 영향을 줄이기 위해 차량의 크기보다 작은 1.5m의 폭과 높이를 영상평 면에서 관심영역으로 설정하였다.
2. 차량검증
차량검증은 분류기를 사용하여 와 에 의해 설정되는 관심영역에서 차량의 존재여부를 확인하는 과 정이다. 이때 의 관심영역에서 차량검증에 실패한 경우에만 의 관심영역에서 차량검증을 수행하여 불필요한 검증에 낭비되는 처리시간을 줄인다.
차량검증에는 국부적인 기울기(gradient)의 크기와 방향의 분포를 사용하는 HOG(histogram of oriented gradient) 특징[9]과 Adaboost 알고리즘으로 학습한 약 분류기(weak classifier)로 결합된 계층 분류기(cascade classifier)[10]를 사용한다. HOG 특징은 적분 영상
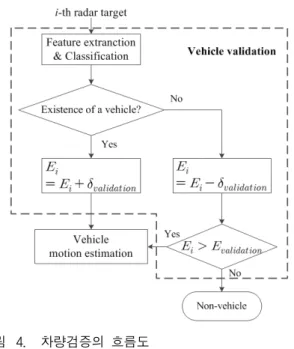
그림 4. 차량검증의 흐름도
Fig. 4. Flowchart of vehicle validation.
(integral image)을 사용하여 연산량을 줄일 수 있을 뿐 만 아니라[11] 차량 후면처럼 고도로 구조화된 모양과 형 태를 표현하기에 적합하다. 약분류기의 단계적인 결합 인 계층 분류기는 단일 분류기보다 검출율이 높고 처리 속도가 빠르다는 장점이 있다[10]. 학습에는 5,500개의 차 량 표본(positive sample)과 3,150개의 비차량 표본 (negative sample)을 사용되며, 계층 분류기는 총 15개 의 단계로 구성된다.
번째 타겟의 관심영역에 대해 분류기를 통해 검증 한 차량은 실세계 좌표에서 관측한 타겟의 위치인 에
그림 5. 영상평면에서 레이더 타겟(빨간색 점), 관심영역 (초록색 사각형), 차량검증의 결과(파란색 사각 형)
Fig. 5. Radar targets (red points), the regions of interest(green boxes), and the results of vehicle validation(blue boxes) in image plane.
있다고 가정하고, 영상 좌표에서 검증한 차량의 위치
를 실세계 좌표로 역투영변환하여
를 계산한다. 는 움직임추 정 과정에서 로 보정된다.
그림 4에 나타난 것처럼 차량검증 결과에 따라 를
만큼 증가 또는 감소시키고, 감소된 타겟은
를 통해 안정적으로 검증된 차량인지 판단한
다. 그림 5는 각 타겟에 대한 관심영역과 차량검증 결 과를 보여준다.
3. 차량의 움직임추정 및 추적
자차의 거동과 레이더의 횡방향 위치오차를 보정하 기 위해 차량의 움직임을 추정한다. 관심영역에 대해 특징점을 추출 및 추적하고 실세계 좌표에서 반복 처리 (iteration procedure)를 통해 특징점들의 평균 움직임을 계산하고 타겟의 위치를 보정하여 차량의 위치를 결정
Initialize
∆ Repeat
Until
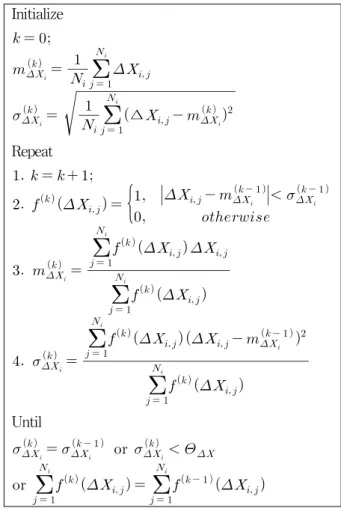
그림 6. 반복 처리의 의사 코드
Fig. 6. Pseudo code of iteration procedure.
한다. 실세계 좌표에서의 움직임추정을 통해 자차의 거 동에 강건하게 차량을 추적할 수 있다.
특징점기반의 움직임추정 방법은 화소 기반의 방법 과 템플릿 정합을 이용한 방법에 비해 계산 복잡도가 낮다. 또한 관심영역에 대해서만 특징점 추출 및 추적 을 수행하여 처리시간을 추가적으로 단축하였다.
제안하는 방법에서는 해리스 코너 검출기[12]를 통해
에 의한 관심영역 내의 특징점을 추출하고,
에 의한 관심영역에서 KLT 특징 추적기[13]를 통 해특징점을 추적한다. KLT 특징 추적기는 계층적 영상 (pyramidal image) 기법을 사용하기 때문에 특징점의 큰 움직임도 추정할 수 있다.
영상에서 추적한 특징점을 실세계 좌표로 역투영변 환을 위해 영상평면에서 번째 타겟의 번째 특징점
은 실세계 좌표에서 같은 에 있다고 가정한다. 와 을 와 로 영상 좌 표에서 실세계 좌표로 역투영변환하고 수식 (7)을 통해 실세계 좌표에서 특징점의 움직임 ∆ 를 구한다.
∆
∆ ∆ ∆ (7)
번째 타겟의 와 방향 움직임 ∆와 ∆은
그림 7. 움직임추정의 흐름도
Fig. 7. Flowchart of vehicle motion estimation
추적한 개의 특징점들의 각 방향별 움직임의 평균으 로 계산한다. 보다 정확한 움직임추정을 위해 특징점 중에서 타겟의 움직임을 대표하는 특징점을 각 방향별 로 선택하여 움직임의 평균을 계산한다. 또한 특징점의 선택과 움직임의 평균을 계산하는 과정은 일정 조건을 만족할 때까지 반복하여 움직임추정의 정확성을 향상시 킨다.
그림 6은 ∆을 계산하는 과정의 의사 코드(pseudo code)를 나타내며, ∆도 같은 과정을 통해 계산된다.
반복 처리를 통해 실세계 좌표에서 타겟의 움직임을 추 정하여 수식 (8)에 나타난 것처럼 현재 프레임에 보정 된 타겟의 위치를 갱신한다.
∆ (8) 위 수식에서 는 보정한 위치를 계산할 때 차량검증 의 결과와 움직임추정의 결과의 반영 비율을 결정하는 가중치다. 움직임추정 이전에 차량검증을 수행한 경우 에는 로 설정하여 차량검증의 결과와 움직임추 정 결과를 통해 보정된 타겟의 위치를 계산한다. 그렇 지 않은 경우에는 으로 설정하여 움직임추정의 결과만을 통해 보정된 타겟의 위치를 계산한다.
수식 (8)을 통해 계산된 이 현재 프레임에서 번 째 타겟의 보정된 위치이다. 와 ∆ 를 칼만 필 터를 통해 차량의 위치로 결정하고 다음 프레임의 타겟 의 위치 를 예측한다.
그림 7에 나타난 것처럼, 전술한 과정으로 을 계 산하고, 와의 위치를 비교하여 갱신한 를 통해
번째 타겟이 차량인지 결정한다. 는 위치 비교 결 과에 따라 만큼 증가 또는 감소하여 최소값 0 과 최대값 사이의 값을 가지게 된다. 는 타겟을 차량으로 최종 판단하는 추적 신뢰도 임계치이 다. 현재 프레임에서 검출된 차량은 움직임추정을 통해 차량으로 판단된 타겟의 을 중심으로 1.8m의 폭과 너비를 가진다.
Ⅴ. 성능평가 및 결과 분석
본 장에서는 제안하는 움직임추정 과정의 도입이 차
량검출 및 추적 성능에 미치는 영향을 보여주고 그 결 과를 분석한다. 다양한 도로환경에서 수집한 데이터를 사용하여 정량적인 성능평가와 함께 정성적인 평가 결 과도 제시한다. 실험은 15fps(frame per second)로 취득 한 1280 × 800 크기의 영상과 77GHz 자동차 레이더 로 수집한 데이터에 대해 Intel Core i7 950 3.06GHz CPU의 PC에서 수행하였다.
움직임추정 과정의 도입이 검출 및 추적 결과에 미치 는 영향을 분석하기 위해 500개의 연속하는 프레임에서 움직임추정을 통해 보정한 위치와 보정하지 않은 위치 를 비교하였다. 그림 8은 타겟의 실세계 좌표 의 관 측한 위치와 움직임추정을 통해 보정한 위치를 비교하 는 그래프다. 그림 9는 움직임추정을 통해 실세계 좌표 의 를 보정한 것과 를 카메라의 높이로 고정한 것 을 영상평면에 투영변환 하였을 때 영상평면에서 높이
를 비교하는 그래프다. 그림 8과 그림9에서 모두 보정 한 위치가 보정하지 않은 것보다 프레임의 진행에 따라 급격한 위치변화 없이 시간적 일관성을 유지하는 것을 확인할 수 있다.
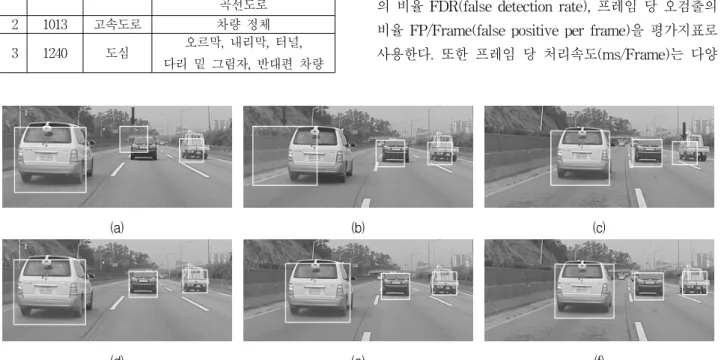
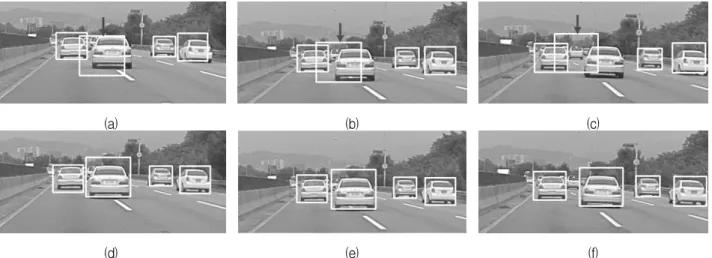
그림 10과 그림 11은 자차 및 전방차량의 차선변경시 움직임추정 여부에 따른 차량검출의 결과를 각각 보여 준다. 두 그림에서 빨간색 화살표는 차량검증만 수행할 경우 발생하는 오검출을 나타낸다. 움직임을 추정한 결 과는 두 경우 모두 전방차량을 강건하게 추적하는 것을
그림 8. 실세계 좌표에서 관측한 타겟의 횡방향 위치와 움직임추정을 통해 보정한 횡방향 위치 비교 Fig. 8. Comparison of the lateral position of the
observed target and the estimated target in the world coordinates.
(a) (b) (c)
(d) (e) (f)
그림 10. 자차의 차선변경시 움직임추정 여부에 따른 결과 비교 : (a-c) 차량검증 결과 (d-f) 움직임추정 결과. 빨간색 화 살표는 오검출을 나타낸다.
Fig. 10. Comparison of the results of detection according to motion estimation when the ego-vehicle is changing lane : (a-c) results of vehicle validation, (d-f) results of motion estimation. The red arrow indicates a false positive.
그림 9. 실세계 좌표의 타겟 높이를 고정한 것과 움직 임추정을 통해 보정한 것의 영상평면에서 높이 비교
Fig. 9. Comparison of the height position of target at a fixed height on the -axis and the estimated target in the image coordinates.
DB # of
frames 장소 특징
1 1750 고속도로 자차 및 전방차량의 차선 변화, 곡선도로
2 1013 고속도로 차량 정체
3 1240 도심 오르막, 내리막, 터널,
다리 밑 그림자, 반대편 차량 표 1. 실험에서 사용한 DB의 정보
Table 1. Information of using database in the experiment.
DB 1 DB 2 DB 3
NV/Frame 3.4 4.5 2.9
TPR(%) 98.4 97.9 96.5
FDR(%) 0.3 0.4 1.8
FP/Frame 1.0 1.7 5.1
ms/Frame 5.5 6.5 5.6
표 2. 다양한 도로환경에서 제안하는 방법의 성능
Table 2. Performance of the proposed method under various road conditions.
Liu 등의 방법[5] 제안하는 방법
# of frames 5102 4003
NV/Frame 2.3 3.5
TPR(%) 96.5 97.8
FDR(%) 1.1 0.7
FP/Frame 2.6 2.5
표 3. Liu 등의 방법[5]과 제안하는 방법의 성능 비교 Table 3. Performance comparison between the proposed
method and Liu et al. method[5].
확인할 수 있다.
제안하는 차량검출 및 추적 방법의 강건성을 확인하 기 위해 다양한 도로환경에서 평가하였다. 객관적인 성 능평가를 위해 프레임 당 차량 수 NV/Frame (number of vehicles per frame), 전체차량 중에서 검출한 차량의 비율 TPR(true positive rate), 검출된 차량에서 오검출 의 비율 FDR(false detection rate), 프레임 당 오검출의 비율 FP/Frame(false positive per frame)을 평가지표로 사용한다. 또한 프레임 당 처리속도(ms/Frame)는 다양
(a) (b) (c)
(d) (e) (f)
그림 11. 전방차량의 차선변경시 움직임추정 여부에 따른 결과 비교 : (a-c) 차량검증 결과 (d-f) 움직임추정 결과. 빨간색 화살표는 오검출을 나타낸다.
Fig. 11. Comparison of the results of detection according to motion estimation when a preceding vehicle is changing lane : (a-c) results of vehicle validation, (d-f) results of motion estimation. The red arrow indicates a false positive.
(a) (b) (c)
(d) (e) (f)
그림 12. 다양한 도로환경에서 제안하는 방법의 차량검출 결과 (a-c) : 고속도로, (d-f) : 도심
Fig. 12. Examples of preceding vehicle detection under various road conditions : (a-c) highway, (d-f) urban
한 도로환경이 처리시간에 미치는 영향을 확인하기 위 함이다.
표 1은 성능평가에 사용된 DB의 특성을 보여준다.
표 2는 표 1의 DB들을 대상으로 수행하는 제안하는 방 법의 성능평가 결과이다.
자차 및 전방차량의 차선 변화가 많은 DB 1과 NV/Frame가 높은 DB 2는 높은 TPR과 낮은 FDR을 보여준다. 또한 제안하는 방법은 차량 혼잡도가 증가해 도 신뢰도가 높은 타겟에 대해 차량검증 과정 없이 레
이더 타겟 정합과 움직임추정 및 추적 과정을 통해 차 량을 검출하기 때문에 처리속도에는 큰 변화가 없다는 것을 확인할 수 있다. DB 3은 다른 DB에 비해 조명조 건 및 반대편 차량 등으로 인한 간섭이 심한 환경에서 수집되었기 때문에 성능이 다소 낮게 측정되었지만, 전 체적으로 다양한 도로환경에서 강건하게 차량을 검출하 는 것을 확인할 수 있다.
표 3은 Liu 등의 방법[5]과 제안하는 방법의 성능 비 교 결과를 보여준다. 위 표에 나타난 것처럼 제안하는
방법은 Liu 등의 방법[5]에 비해 높은 차량 혼잡도를 가 지는 영상에 대해서 높은 TPR과 낮은 FDR을 보임을 확인할 수 있다. 또한 Liu 등의 방법[5]은 도심에서 취 득한 영상에 대해 TPR은 94.4%, FDR은 2.1%, FP/Frame은 9.7의 성능을 보이므로, 제안하는 방법이 도심에서 기존의 방법보다 우수한 성능을 나타내는 것 을 확인할 수 있다. 그림 12는 제안하는 방법으로 DB 1-3에 대해 차량을 검출한 결과 중 일부를 보여준다.
그림에서 확인할 수 있듯이 다양한 도로환경에서도 강 건하게 차량을 검출한다.
Ⅵ. 결 론
본 논문에서는 레이더와 비전센서를 융합한 움직임 추정을 통해 전방차량을 강건하게 검출 및 추적하는 방 법을 제안하였다. 제안하는 방법에서는 전방차량의 움 직임을 추정하여 레이더로 관측한 타겟의 부정확한 횡 방향 위치를 보정할 뿐만 아니라 자차의 거동에 따른 자차-지면 간의 기하학적 관계 변화를 보상한다. 또한 관심영역 내 특징점기반의 움직임추정을 통해 연산량을 크게 증가시키지 않고 레이더 타겟을 보정하여 차량검 출율을 향상시킨다. 높은 신뢰도 값을 가지는 타겟에 대해서는 차량검증의 추가적인 수행 없이 전방차량을 추적하여 평균 처리시간을 단축하였다. 실험 결과는 제 안하는 움직임추정 방법이 강건하게 전방차량을 추적하 는 것은 물론 다양한 도로환경에서 기존의 연구에 비해 정확하고 강건하게 동작함을 입증하였다.
참 고 문 헌
[1] Y. Tan, F. Han, and F. Ibrahim, “A Radar Guided Vision System for Vehicle Validation and Vehicle Motion Characterization,” in Proceeding of the IEEE Intelligent Transportation Systems Conference, pp. 1059-1066, 2007.
[2] E. Richter, R. Schubert, and G. Wanielik, “Radar and vision based data fusion - Advanced filtering techniques for a multi object vehicle tracking system,” in IEEE Intelligent Vehicles Symposium, pp. 120-125, 2008.
[3] 김기석, 조재수, “영상 기반의 차량 검출 및 차간 거리 추정 방법,” 전자공학회 논문지, 제 49권 SP편, 제 3 호, 284-292쪽, 2012년 5월.
[4] G. Alessandretti, A. Broggi, and P. Cerri,
“Vehicle and Guard Rail Detection Using Radar and Vision Data Fusion,” IEEE Transactions on Intelligent Transportation Systems, vol. 8, no. 1, pp. 95-105, 2007.
[5] X. Liu, Z. Sun, and H. He, “On-road vehicle detection fusing radar and vision,” in IEEE International Conference on Vehicular Electronics and Safety, pp. 150-154, 2011.
[6] A. Haselhoff, A. Kummert, and G. Schneider,
“Radar-Vision Fusion with an Application to Car-Following using an Improved AdaBoost Detection Algorithm,” in Proceeding of the IEEE Intelligent Transportation Systems Conference, pp. 854-858, 2007.
[7] B. Lee and G. Kim, “Robust detection of preceding vehicles in crowded traffic conditions,”
International Journal of Automotive Technology, vol. 13, no. 4, pp. 671-678, 2012.
[8] C. G. Keller, M. Enzweiler, and D. M. Gavrila,
“A new benchmark for stereo-based pedestrian detection,” in IEEE Intelligent Vehicles Symposium, pp. 691-696, 2011.
[9] N. Dalal and B. Triggs, “Histograms of oriented gradients for human detection,” in Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pp. 886-893, 2005.
[10] P. Viola and M. Jones, “Robust real-time face detection,” Internation Journal of Computer Vision, vol. 57, no. 2, pp. 137-154, 2004.
[11] Q. Zhu, S. Avidan, M. C. Yeh, and K. T. Cheng,
“Fast Human Detection Using a Cascade of Histograms of Oriented Gradients,” in Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pp.
1491-1498, 2006.
[12] C.harris and M.Stephens, “A combined corner and edge detector,” in Proceedings of the 4th Alvey Vision Conference, pp. 147-151, 1988.
[13] J. Bouguet, “Pyramidal implementation of the Lucas-Kanade Feature Tracker : Description of the algorithm,” The paper is included into OpenCV distribution., 2000.
저 자 소 개 장 재 환(학생회원)
2011년 서강대학교
전자공학과 학사 2011년∼현재 서강대학교 전자공학과 석사과정
<주관심분야 : 컴퓨터비전, 패턴 인식>
김 경 환(정회원)-교신저자 1984년 서강대학교
전자공학과 학사 1986년 서강대학교 전자공학과 석사
1996년 State University of New York at Buffalo 전기 및 컴퓨터 공학과 박사 1997년∼현재 서강대학교 전자공학과 교수
<주관심분야 : 영상신호해석, 패턴인식, 임베디드 시스템 디자인>