CopyrightⒸ2013 KSAE / 126-25 pISSN 1225-6382 / eISSN 2234-0149 DOI http://dx.doi.org/10.7467/KSAE.2013.21.6.209 Transactions of KSAE, Vol. 21, No. 6, pp.209-217 (2013)
경험적 접근법과 동역학적 특성에 기반한 4WD 차량의 제어 전략 개발
함 형 진1)․이 형 철*2)
한양대학교 전기공학과1)․한양대학교 전기생체공학부2)
Control Strategy Development of 4WD Vehicles based on Heuristic Approach and Dynamic Characteristic
Hyeongjin Ham1)․Hyeongcheol Lee*2)
1)Department of Electrical Engineering, Hanyang University, Seoul 133-791, Korea
2)Division of Electrical and Biomedical Engineering, Hanyang University, Seoul 133-791, Korea (Received 25 September 2013 / Revised 4 October 2013 / Accepted 7 October 2013)
Abstract : This paper presents a control strategy of 4 wheel drive (4WD) vehicles. Proposed control strategy has simple structure and can easily apply to various vehicles with low cost and time. It is consist of feedforward control for traction ability, fedback control for minimizing the wheel speed difference and yaw control for lateral stability. In addition, to integrate the traction and stability control, a blending function is applied. To evaluate the feasibility of the proposed control strategy, actual vehicle experiment is conducted after deciding the tuning parameter through the simulation. The simulation is accomplished by CarSim and Matlab/Simulink and the actual vehicle test is conducted using full size Sports Utility Vehicle (SUV) equipped rear wheel based solenoid type 4WD device.
Key words : 4WD(4륜 구동), Vehicle dynamics(차량동역학), Heuristic approach(경험적 접근법), TOD(토크분배 장치), Traction control(견인력 제어), Stability control(안정성 제어)
1. 서 론1)
겨울철의 잦은 폭설과 산과 계곡 등에서 여가를 즐기려는 인구가 증가함에 따라 4WD(4 Wheel Drive, 사륜구동) 자동차에 대한 수요도 점차 늘어가 고 있는 추세이다.1) 사륜구동 장치는 구동륜의 토크 일부를 비구동륜으로 전달하는 장치다. 따라서 구 동륜이 제 역할을 하지 못할 경우 비구동륜으로 토 크를 전달하여 차량이 정상상태로 돌아오도록 할 수 있다.
사륜구동 장치는 구동방식에 따라 Part time, Full time, On-Demand 4WD로 분류할 수 있다.2) Part time 4WD는 운전자가 쉬프트 레버나 스위치를 이용해 작동시켰을 경우에만 구동되는 방식이고, Full time
*Corresponding author, E-mail: [email protected]
4WD는 운전자의 작동 없이 항상 구동 가능한 방식 이다. On-Demand 4WD도 운전자의 작동 없이 구동 되지만 Full time 4WD와는 다르게 주행 상황에 따라 전자식으로 제어 토크의 양이 결정된다.
최근에는 이런 전자식 사륜구동 장치의 장점을 이용하여 견인력 제어뿐만 아니라, 상황에 따른 제 어 토크의 감소를 통해 연비 효율을 좋게 하기도 하 고,3) 전・후 토크 분배를 통한 모멘트 발생을 통해 안 정성 제어4,5)에도 적용되고 있다. 이와 같이 사륜구 동 장치는 목적에 따라 제어를 달리함으로써 다양 한 차량에 적용될 수 있다.
4륜구동 장치의 제어에는 Look-up table(LUT) 기 반 제어,6) Sliding mode 제어,3,7) Optimal 제어8) 등이 연구되어 왔다. 특히 양산되고 있는 사륜구동장치
함형진․이형철
에는 LUT 기반 또는 rule 기반 제어 방식이 많이 적 용되어 왔다. LUT 또는 rule 기반의 제어는 모든 영 역에서 제어가 잘 될 수 있도록 세부적으로 튜닝이 가능하다는 큰 장점이 있다. 하지만 이와 같은 모든 영역에서의 튜닝은 차종이 다양해질수록 시간과 비 용이 기하급수적으로 증가한다는 단점이 존재한다.
반면 Sliding mode나 Optimal 제어 등의 고급 제어 이 론을 이용한 방식은 차종에 따른 변경이 용이하지 만 모든 영역에서 제어가 잘 되게 하기는 어렵다.
따라서 본 논문에서는 모든 영역에서 제어가 잘 되도록 쉽게 튜닝이 가능한 새로운 제어 전략을 제 시한다. 이를 위해 경험적인 접근과 간략한 차량의 동적 특성에 대한 이해를 바탕으로 튜닝 인자를 포 함하는 수식 기반의 제어 전략을 구성한다. 차량의 거동으로부터 측정되는 상태를 기반으로 feedback 제어를 추가해 견인력 제어를 수행한다. 또한 견인 력 제어뿐만 아니라 고속에서 감속 없이 안정성을 향상시킬 수 있는 요속도 오차 기반의 안정성 제어 전략도 제안한다. 제안된 제어 전략은 Matlab/Simu- link를 이용하여 구현하고, CarSim과 연동하여 유효 성을 검증한다. 또한 후륜기반 사륜구동 차량을 이 용하여 실차 시험으로 제안된 제어 전략에 대한 검 증을 진행한다.
이를 위해 2장에서는 사륜구동 자동차의 파워트 레인 동특성 분석을 다루고, 3장에서는 분석된 결과 를 바탕으로 4WD 제어 전략을 제안한다. 4장에서 는 제안된 제어 전략을 시뮬레이션을 통한 검증 결 과를, 5장에서는 실차 시험 결과를 제시한다.
2. 파워트레인 동특성 분석
차량의 파워트레인 즉, 엔진에서 바퀴까지의 토 크 전달 형태를 바탕으로 제어 전략을 구성하기 위 해 동특성 분석이 필요하다. 동특성 분석을 통해 사 륜구동 자동차의 성능에 영향을 주는 인자를 도출 할 수 있고, 파워트레인 전체의 토크 전달 형태를 기 반으로 제한 조건을 걸어주면 전반적으로 차량에 무리를 줄 수 있는 제어를 하지 않게 되기 때문에 좀 더 효율적인 제어 전략이 될 수 있기 때문이다.
일반적으로 엔진의 토크 분포는 Fig. 1(a)와 같다. 엔 진 회전수(rpm)에 따라 점점 증가하다가 1700~2000rpm
(a) Diesel engine map
(b) Vehicle torque curve Fig. 1 Powertrain dynamics analysis
대의 최대토크 지점을 지나서 감소하는 양상이다.
반면에 Fig. 1(b)의 바퀴에서 필요한 견인력 곡선 을 보면 변속기의 기어 비에 의해 60km/h 이후에 필 요한 견인력이 빠른 속도로 감소하는 것을 볼 수 있 다. 엔진에서 공급 가능한 토크는 풍부하지만 속도 가 증가함에 따라 각 바퀴에 전달할 수 있는 토크의 양이 제한되기 때문에 제어 전략에 이를 반영하면 과도한 견인력 제어를 방지할 수 있다.
사륜구동 장치에서 차량 상태를 feedback하여 상 태를 파악할 수 있는 센서로는 주로 휠 속도 센서가 사용된다. 구동륜 축과 비구동륜 축의 평균 휠 속도 의 차이(휠 속도 오차)를 통해 정상주행 상태인지 미끄러짐 상태인지를 파악한다. 만약 미끄러짐 상 태라면 미끄러지는 순간부터 비구동륜 측으로 토크 를 전달하여 정상주행 상태로 돌아갈 수 있다. 따라 서 빠른 응답성을 얻기 위해서는 휠 속도 오차가 커 질수록 전달 토크도 급격하게 커져야 한다.
경험적 접근법과 동역학적 특성에 기반한 4WD 차량의 제어 전략 개발
또한 견인력 제어에서는 초기 발진 응답 성능을 위해 차량의 상태와 관계없이 일정량의 토크를 전 달해 주는 것이 좋다. 이 토크량은 속도가 증가할수 록 급격히 감소해야 한다.
안정성 제어에서는 요속도 센서를 이용하여 차량 의 상태를 feedback한다. 실제 사륜구동 장치에는 요 속도 센서가 장착되지 않지만, 최근 여러 나라에서 ESC가 의무 장착되고 있기 때문에 CAN 통신을 통해 서 정보를 얻을 수 있다. 따라서 요속도 센서 값과 차 량 동역학 수식을 이용해 산출 가능한 기준 요속도 (Reference yaw rate)9)와의 차이인 요속도 오차를 이 용해 전달 토크량을 결정한다. 요속도 오차가 있다는 것은 차량이 불안정해지기 시작했다는 의미이므로 최대한 빨리 토크를 전달해 요 모멘트를 발생시키는 것이 좋다. 다만 견인력 제어에서와는 달리 전달되는 토크량이 차량의 속도에는 크게 영향을 받지 않는다.
위에서 분석한 내용을 요약하면 다음과 같다.
1) 차량 속도에 따라 엔진이 공급 가능한 토크량에 제한이 있다.
2) 견인력 제어에서 초기 발진 응답 성능을 위해 속 도에 반비례하는 토크량을 줄 필요가 있다.
3) 안정성 제어에서 요 모멘트를 발생시키기 위해 요속도 오차에 비례하는 토크량을 줄 필요가 있다.
3. 4WD 제어 전략
본 장에서는 파워트레인의 동특성을 분석한 결과 를 이용하여 견인력 제어와 안정성 제어에 대한 4WD 제어 전략을 제안한다. LUT나 rule 기반 제어 방식에 비해 설계 및 튜닝을 하기 용이한 형태로 구 성하기 위해 본 연구에서는 간단한 수식기반의 제 어 전략으로 구성하도록 한다.
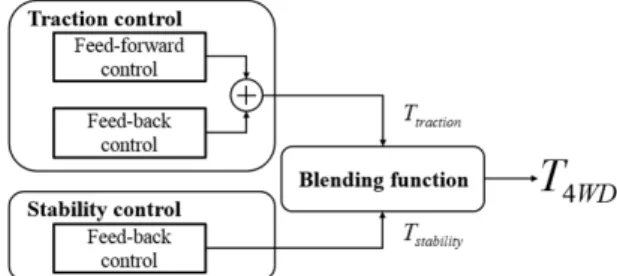
전체적인 제어 전략의 개념을 Fig. 2에 나타내었 다. 크게 견인력과 안정성 제어 2개의 부분으로 나 눠지고, 이 부분은 혼합 함수를 이용하여 통합된다.
혼합 함수는 요속도 오차를 변수로 하여 견인력 제 어와 안정성 제어를 적절히 통합해주는 역할을 한 다. 견인력 제어는 다시 2개의 부분으로 나눠지는 데, 하나는 feedforward 제어이고 나머지 하나는 feedback 제어이다. 다음 절에서 전체 제어 알고리즘 에 대한 자세한 설명을 제시한다.
Fig. 2 Concept of overall control strategy
3.1 견인력 제어 전략
앞서 언급한 바와 같이, 견인력 제어 전략은 2개 의 부분으로 구성된다. Feedforward 제어 부분과 feedback 제어 부분이 그것이다.
Feedforward 제어 전략은 파워트레인 동특성 분 석결과의 2번째 항목과 연관된다. 사륜구동 장치의 가장 큰 목적은 발진 성능 향상이다. 발진 성능을 올 리기 위해서는 초기 발진 순간부터 모든 바퀴에 토 크가 공급되어 차량의 무게를 견인해야 한다.
따라서 Fig. 3과 같이 APS (Acceleration Pedal Signal)에 비례하여 전달 토크량이 증가하도록 구성 해야 한다. 이때 증가하는 기울기는 튜닝을 통해 조 정 가능해야 한다. 이를 APS 인자라고 하고, 식으로 나타내면 다음과 같다.
× (1) where SAPS : Slope of APS function
식 (1)에서 APS는 입력이고 SAPS는 튜닝 인자이다.
발진 성능을 위해 사용된 토크량은 속도가 증가 할수록 감소되어야 한다. 동특성 분석결과의 첫 번 째 항목을 적용하기 위해 Fig. 4와 같은 형태의 전달 토크량을 산출하는 식을 구한다. Fig. 4에서 보듯이 초기 발진 성능을 유지하기 위해 일정부분 포화된
Fig. 3 Shape of APS (or △N) function
Hyeongjin Ham․Hyeongcheol Lee
Fig. 4 Shape of vehicle speed function
부분이 반드시 필요하다. 포화가 해제되는 시점은 차량의 속도에 대응해 결정되도록 구성한다.
또한, 차량 속도가 일정수준 이상으로 증가하였 을 경우 연비 향상 효과를 위해 전달 토크량이 0이 될 수 있도록 구성해야 한다. 이를 포화속도 인자라 고 하고, 식으로 나타내면 다음과 같다.
₋ ₋
(2) where IFF : Vehicle speed at intercept
Vx-sat : Saturation speed
식 (2)에서 Vx는 입력이고, IFF와 Vx-sat는 튜닝 인자 이다.
최종적으로 두 식을 이용하여 feedforward 제어를 완성하기 위해서는 두 식을 곱하여 준다. 또한, 위의 두 식은 모두 정규화(Normalize)되어 있기 때문에 의미 있는 값을 얻기 위해서는 feedforward 제어를 통해 최대로 전달할 수 있는 토크 값을 곱해줘야 한 다. 이를 식으로 나타내면 다음과 같다.
××
₋ (3)
where TFFmax : Feed-forward max torque
Feedback 제어 전략에서는 센서로부터 알 수 있 는 차량의 상태를 이용하여 그에 맞게 제어량을 조 절한다. 앞서 설명한 바와 같이 사륜구동 장치에는 휠 속도 센서를 이용할 수 있기 때문에 휠 속도 오차 를 구할 수 있다. 휠 속도 오차가 발생하였을 경우, 최대한 빨리 비구동륜 측으로 토크를 전달해 준다 면 차량이 정상상태로 되돌아 올 수 있다. 그렇기 때 문에 발진 성능 제어에서처럼 휠 속도 오차에 비례 하는 식을 사용한다. 식 (1)과 유사한 형태에서 입력 과 튜닝인자만 아래와 같이 바꾸어 구성한다. 이를
횔 속도 오차 인자라고 정의한다.
∆ ∆ × ∆ (4)
where S△N : Slope of △N function
식 (4)에서 △N은 입력이고 S△N은 튜닝 인자이다.
Fig. 5 Shape of vehicle speed function
Feedback 제어에서도 feedforward 제어와 마찬가 지로 속도에 따른 전달 토크 감소가 필요하다. 다만, feedforward와는 다르게 초기 발진 성능에 대한 고 려가 필요 없기 때문에 Fig. 5와 같은 형태를 가지면 된다. 이를 견인 속도 인자라고 하고, 식으로 나타내 면 다음과 같다.
(5)
where IFB : Vehicle speed at intercept
식 (5)에서 Vx는 입력이고, IFB는 튜닝 인자이다.
Feedforward와 마찬가지로 최종적으로 feedback 제어를 완성하기 위해서는 식 (4)와 (5)를 곱하여 준 다. 마찬가지로 정규화된 식들이므로 feedback 제어 를 통해 최대로 전달할 수 있는 토크 값을 곱해야 한 다. 이를 식으로 나타내면 다음과 같다.
×∆×
(6)
where TFBmax : Feed-back max torque
식 (3)과 (4)를 더해서 최종 견인력 제어 토크를 결 정한다.
(7)
3.2 안정성 제어 전략
안정성 제어는 앞서 언급한 바와 같이, ESC에 장
Control Strategy Development of 4WD Vehicles based on Heuristic Approach and Dynamic Characteristic
착된 요속도 센서를 이용해 제어 전략이 구성된다.
견인력 제어의 feedback 제어 부분과 마찬가지로 요 속도 오차를 이용하여 제어량을 조절한다. 요속도 오차가 발생했을 경우, 차량이 과도 조향(Over steer) 이나 부족 조향(Under steer) 현상으로 미끄러지고 있다는 의미이므로 최대한 빨리 비구동륜 측으로 토크를 전달해 요 모멘트를 발생시켜야 한다. 따라 서 견인력 제어 전략의 발진 성능 제어나 feedback 제어와 같은 형태로 튜닝 인자만 바꾸어서 구성하 도록 한다. 이를 각각 요속도 오차 인자와 안정 속도 인자라고 하고, 식으로 나타내면 아래와 같다.
× (8) where Syaw : Slope of yaw rate function
(9)
where Iyaw : Yaw rate at intercept
식 (8)과 (9)에서 입력은 요속도 오차와 차량 속도 이고 튜닝 인자는 Syaw와 Iyaw이다.
최종적으로 안정성 제어를 완성하기 위해서는 식 (8)와 (9)를 곱하여 준다. 견인력 제어에서와 마찬가 지로 정규화된 식들이므로 안정성 제어를 통해 최 대로 전달할 수 있는 토크 값을 곱해야 한다. 이를 식으로 나타내면 다음과 같다.
××
₋ (10) where Tstabilitymax : Yaw rate max torque
3.3 통합 제어 전략
견인력 제어와 안정성 제어는 독립적으로 작동 하지 않는다. 견인력이 필요한 상황에서 차량이 횡 방향으로 불안정해질 수 있고, 횡방향으로 불안정 한 상황에서도 견인력이 필요할 수도 있다. 다만, 상황에 따라 둘 중 한쪽의 제어가 더 필요할 수는 있다. 따라서 본 연구에서는 혼합 함수 개념을 이용 하여 두 가지 제어를 통합한다. 견인력과 안정성의 경중을 판단하기에는 요속도 오차가 적절하다고 판단되어 Fig. 6과 같은 개념을 통해 아래의 식을 도 출하였다.
Fig. 6 Shape of blending function
· ·
(11)
4. 시뮬레이션 결과
제안한 제어 전략을 튜닝하기 위해 시뮬레이션을 수행한다. 먼저 튜닝 인자별로 값을 조절해가며 차 량 성능이 가장 좋은 인자들을 구한 뒤, 간단하게 구 현된 PID 제어 알고리즘10)과 성능 비교를 진행한다.
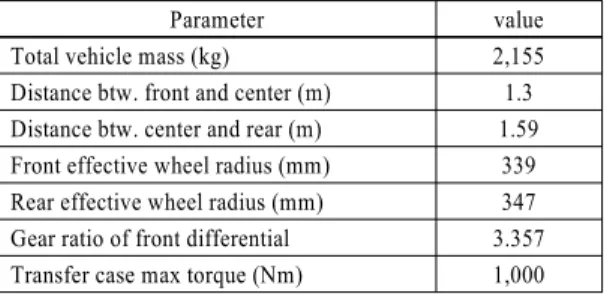
본 논문에서는 시뮬레이션의 편의성과 신뢰성을 위해 차량 제어 분야에서 널리 쓰이고 있는 CarSim 을 이용해 결과를 검증한다. CarSim에도 사륜구동 자동차에 대한 모델이 있지만, 본 연구에서는 제안 한 알고리즘의 토크 명령을 실제 차량의 인터페이 스와 일치하게 전달하기 위해 사륜구동 장치부분만 자체 모델링10)을 통해 구현한다. 시뮬레이션에 사용 된 차량 제원은 다음과 같다.
Table 1 Vehicle specification
Parameter value
Total vehicle mass (kg) 2,155
Distance btw. front and center (m) 1.3 Distance btw. center and rear (m) 1.59 Front effective wheel radius (mm) 339 Rear effective wheel radius (mm) 347 Gear ratio of front differential 3.357 Transfer case max torque (Nm) 1,000
4.1 튜닝 인자 결정
3장에서 제안한 각 수식에 포함된 튜닝 인자를 결 정하기 위해 시뮬레이션을 활용한다. 시뮬레이션을 통한 튜닝 인자의 결정은 확정이 아니라 안으로써 임시 결정이 되며, 추후 실차 시험을 통해 확정될 수 있다. 튜닝 인자들만 간편하게 변경이 가능하도록 Matlab/Simulink의 mask 기능을 사용하였다. 이와
함형진․이형철
같은 시뮬레이션 환경에서 feedforward부터 안정성 제어까지 순차적으로 튜닝 인자를 변경하고, 차량 성능변화를 확인하면서 튜닝 인자를 결정하였다.
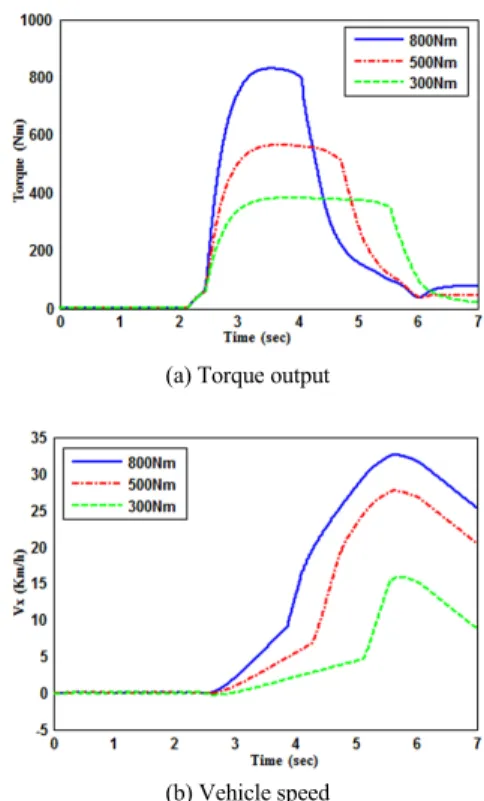
먼저 feedforward 제어의 최대 토크 인자(TFFmax) 를 변화시켰을 때의 시뮬레이션 결과는 아래와 같 다. 12% 기울기에 구동륜이 0.3 mu의 얼음에 놓여 있는 전・후 split mu 조건에서 실시하였다.
Fig. 7의 (b)에서 보듯이 TFFmax가 100 Nm일 때는 탈출속도가 현저히 떨어지지만 110 Nm 이상만 되 어도 훨씬 빠른 속도로 탈출할 수 있다. 따라서 TFFmax는 110~500 Nm 사이 값으로 정하면 되는데 본 논문에서는 험로 주행조건을 고려해 400 Nm로 정 하였다. 또한, 출력 토크를 보면 100 Nm일 때가 가 장 큰데, 이 현상은 초기 발진 상황에서 너무 적은 토크와 12%의 기울기로 인해 뒤로 밀리면서 전·후 바퀴가 모두 얼음 위에 올라가서 생긴 것으로 판단 된다. 이 결과로 초기 발진 성능이 중요하다는 것을 알 수 있다.
(a) Torque output
(b) Vehicle speed
Fig. 7 Simulation result according to variate max TFFmax
(a) Torque output
(b) Vehicle speed
Fig. 8 Simulation result according to variate max TFBmax
Feedforward와 동일한 조건에서 feedback 제어의 최대 토크 인자(TFBmax)를 변화시켰을 때의 시뮬레 이션 결과를 Fig. 8에 나타내었다. 여기서는 최대 토 크에 따른 성능차이가 현저하게 나타나는 것을 확 인할 수 있다. 다만, feedback에서만 최대 800 Nm를 내는 것은 현실적이지 않기 때문에 600 Nm로 최종 결정하였다.
위와 같은 반복적인 시뮬레이션을 통해 다음 표 와 같이 튜닝 인자를 결정하였다.
Table 2 Values of tuning parameters
Parameter SAPS IFF S△N Vx-sat
Value 0.5 130 0.03 5
Parameter IFB Iyaw Syaw
Value 100 150 0.03
Parameter TFFmax TFBmax Tstabilitymax
Value (Nm) 400 600 300
4.2 12% Split mu 등판
위에서 결정된 튜닝 인자들을 이용해 12% 기울기 를 갖는 split mu 조건에서 시뮬레이션을 수행한다.
경험적 접근법과 동역학적 특성에 기반한 4WD 차량의 제어 전략 개발
(a) Torque output
(b) Vehicle speed Fig. 9 Simulation result at 12% split mu slope
Fig. 9를 보면 제안한 제어 전략의 차량이 빨리 탈 출함으로써 더 좋은 성능을 가진다는 것을 알 수 있 다. 특히 4초 이후 PID 제어기가 토크량을 줄이는 반 면, 제안한 제어 전략은 더 늦게 감소하는 것을 볼 수 있다. 이를 통해 전달 토크를 감소시키는 시점을 튜닝 인자로 선정한 것이 타당하다고 볼 수 있다.
4.3 33% High mu 등판
위에서 결정한 튜닝 인자들이 다른 주행 조건에 서도 잘 맞는지 확인하기 위해 33% 기울기를 갖는 아스팔트 도로 조건에서 시뮬레이션을 수행한다.
33% 기울기는 굉장히 가파르기 때문에 split mu 조 건을 주지 않아도 사륜구동 자동차의 성능을 파악 하기 충분할 것이라고 판단된다.
Fig. 10을 보면 제안한 제어 전략이 제어 토크량 이 적음에도 불구하고 탈출 속도는 더 빠른 것을 알 수 있다. 이 결과로부터 제안한 제어 전략과 튜닝 인 자들이 최적화되었다고 판단할 수 있다.
4.4 평지 Step steer 주행
마찬가지로 횡방향 불안정 상황에서 제안한 제어 전략의 유효성도 시뮬레이션을 통해서 검증한다.
시뮬레이션 조건은 마찰계수가 0.3인 평지 얼음판
(a) Torque output
(b) Vehicle speed Fig. 10 Simulation result at 33% slope
위에서 속도를 40 → 60 km/h로 증가시키고, 조향각 을 0 → 100 deg로 Step steer하는 상황이다.
Fig. 11에서 보는 것과 같이 제어하지 않은 차량 은 미끄러져 spin-out 되는 것을 확인할 수 있다. 반 면 제안한 제어 전략은 요속도 오차도 거의 없고, 조 향 하는 방향으로 잘 주행하는 것을 볼 수 있다. 이 로부터 안정성 제어 전략의 튜닝 인자들이 적절하 게 결정되었다고 판단할 수 있다.
5. 실차시험 결과
시뮬레이션을 통해 선정된 튜닝 인자들을 차량에 맞게 튜닝하기 위해 실차시험을 진행하였다. 실차 시험은 후륜 기반의 솔레노이드 형태의 사륜구동 장치가 장착된 차량으로 진행하였고, 제안된 알고 리즘은 RCP 장비를 이용해 차량에 제어 명령을 전 달한다. 전제 실험 구성은 Fig. 12와 같다.
시험 조건은 Wide Open Throttle (WOT) 상태로 시 뮬레이션 조건과 동일하게 12% split mu와 33% high mu, 그리고 평지에서 구동륜이 낮은 마찰계수에 있 고, 구동륜에 버팀목을 괴어 놓아 구동륜의 미끄러 짐이 생기는 상황이다. 버팀목 시험조건은 시뮬레 이션으로 구현하기 힘든 조건이기 때문에 실차시험 이 상당한 의미를 가진다.
Hyeongjin Ham․Hyeongcheol Lee
Fig. 12 Vehicle test environment (a) Vehicle trajectory
(b) Yaw rate error Fig. 11 Simulation result of stability control
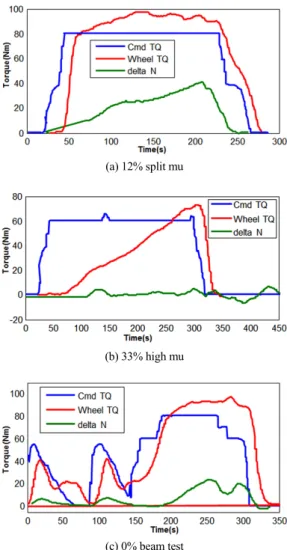
Fig. 13(a)는 12% 기울기의 split mu 조건의 결과이 다. 여기서 토크 값은 Y축에 여러 신호가 공존하기
(a) 12% split mu
(b) 33% high mu
(c) 0% beam test Fig. 13 Simulation result of vehicle test
Control Strategy Development of 4WD Vehicles based on Heuristic Approach and Dynamic Characteristic
때문에 정규화하여 나타냈다. 명령 값과 실제 바퀴 에서 측정한 토크 값을 보면 초기 발진 응답성능이 빠른 것을 확인할 수 있고, 횔 속도 오차를 잘 억제 하는 것을 확인할 수 있다.
Fig. 13(b)의 33% high mu 조건은 휠 속도 오차가 크지 않아서 실제 휠 토크가 천천히 증가하는 것을 볼 수 있다. Fig. 13(c)의 버팀목 조건의 1.5초 이전 명 령 값은 진입하면서 생긴 값으로 무시해도 된다. 이 조건 역시 빠른 응답성을 보이며 휠 속도 오차를 억 제하고 있는 것을 확인할 수 있다.
4장의 시뮬레이션 결과와 5장의 실차시험 결과로 부터 비슷한 제어량으로 차량을 제어하는 것을 확인 할 수 있었다. 이를 통해 제안한 제어 전략이 실제 차량 에서도 잘 작동하고, 시뮬레이션에서처럼 다른 제어 전략에 비해 좋은 성능을 낸다고 볼 수 있다. 다만 시뮬 레이션에서와 같이 다른 제어기로 동일 상황을 연출 하기가 어렵기 때문에 직접적인 비교는 불가능하다.
6. 결 론
본 논문에서는 튜닝에 소모되는 시간과 비용을 줄 일 수 있는 새로운 개념의 제어 전략을 제시하였다. 파 워트레인의 동특성 분석으로부터 도출된 제한 조건과 간결하지만 튜닝이 잘된 제어 전략을 통해 제어기 개 발에 소모되는 비용을 줄 일 수 있을 것이라 기대된다.
제안된 알고리즘은 1차적으로 시뮬레이션을 통 해 튜닝을 진행하였다. 도출된 4WD 제어 전략은 PID로 구현된 기존의 4WD 제어 알고리즘과 비교하 여 우수성을 입증 받았다. 또한, 시뮬레이션으로부 터 얻은 튜닝 인자들을 이용하여 실차 시험을 통해 제어 전략의 유효성을 입증하였다.
추후에 본 연구에서 제시한 수식들과 제한조건 들을 이용해 최적제어문제를 만들어 풀 수 있다면, 지금보다 더 좋은 성능의 최적 제어 알고리즘을 구 현할 수 있을 것이라고 기대된다.
후 기
본 연구는 산업통상자원부 및 한국산업기술평가 관리원의 산업융합원천기술개발사업의 일환으로 수행되었음. (10033174, 실시간 주행모니터링기반 부품혁신 인프라 개발)
References
1) H. Yeo, D. Kim, T. Kim, C. Kim, S. Hwang and H. Kim, “Development of Regenerative Braking Control Algorithm for a 4WD Hybrid Electric Vehicle,” Transactions of KSAE, Vol.13, No.6, pp.38-47, 2005.
2) SAE J1952 Standards Terms and Definitions, 2010.
3) H. Ham and H. Lee, “Sliding Mode Control Strategy for the Four Wheel Drive Vehicles,”
37th Annual Conference on IEEE Industrial Electronics Society, pp.746-750, 2011.
4) B. Post, X. Kang and C. Cymbal, “Method for Improved Yaw Stabilization Control by Integ- ration of a Direct Yaw Control AWD System with a Vehicle Stability Assist Controller,” SAE 2008-01-1456, 2008.
5) J. Kang, J. Yoo and K. Yi, “Driving Control Algorithm for Maneuverability, Lateral Stability, and Rollover Prevention of 4WD Electric Vehicles with Independently Driven Front and Rear Wheels,” IEEE Transaction on Vehicular Technology, Vol.60, No.7, pp.2987-3001, 2011.
6) H. Ando and T. Murakami, “AWD Vehicle Simulation with the Intelligent Torque Con- trolled Coupling as a Fully Controllable AWD System,” SAE 2005-01-0552, 2005.
7) M. Ohba, H. Suzuki and T. Yamamoto, “Deve- lopment of a New Electronically Controlled 4WD System: Toyota Active Torque Control 4WD,” SAE 1999-01-0744, 1999.
8) J. Yamakawa and K. Watanabe, “A Method of Optimal Wheel Torque Determination for Independent Wheel Drive Vehicles,” Journal of Terramechanics, Vol.43, pp.269-285, 2006.
9) J. Song and K. Boo, “Development and Perfor- mance Evaluation of ESP Systems for Enhan- cing the Lateral Stability during Cornering,”
Transaction of KSME, Vol.30, No.10, pp.1276- 1283, 2006.
10) H. Ham, J. Lee, N. Jeon, J. Ryu, E. Seo and H.
Lee, “A Study of Torque Distribution Control for 4WD Vehicles,” KSAE Spring Conference Proceedings, pp.795-800, 2009.