Copyright
Ⓒ2011 KSAE 1225-6382/2011/111-03
< 기 술 논 문 >
Transactions of KSAE, Vol. 19, No. 3, pp.16-22 (2011)
운전행태 감시를 위한 차량 위험운전 검지장치 연구
홍 승 준*1)․임 양 근1)․오 주 택2)
삼성교통안전문화연구소1)․한국교통연구원2)
A Study on In-vehicle Aggressive Driving Detection Recorder System for Monitoring on Drivers' Behavior
Seung-Jun Hong*1)․Lyang-Keun Lim1)․Ju-Taek Oh2)
1)
Samsung Traffic Safety Research Institute, 7th Fl. Samsung Bldg., 50 Euljiro-1ga, Jung-gu, Seoul 100-842, Korea
2)
Korea Transport Institute, 1160 Simindaero, Ilsanseo-gu, Goyang-si, Gyeonggi 411-701, Korea (Received 8 March 2010 / Accepted 12 October 2010)
Abstract : This paper presents the potential of in-vehicle data recorder system for monitoring aggressive driving patterns and providing feedback to drivers on their on road behaviour. This system can detect 10 risky types of drivers' driving patterns such as aggressive lane change, sudden brakes and turns with acceleration etc. Vehicle dynamics simulation and vehicle road test have been performed in order to develop driving pattern recognition algorithms.
Recorder systems are installed to 50 buses in a single company. Drivers' driving behaviour are monitored for 1 month.
The drivers' risky driving data collected by the system are analyzed. Aggressive lane change in 50km/h below is a cause in overwhelming majority of risky driving pattern.
Key words : In-vehicle data recorder system(차량 데이터 기록장치), Driving pattern recognition algorithms(운전행 태 인식 알고리즘), Aggressive lane change(급차선 변경)
1. 서 론
1)
경찰청 교통사고통계에 따르면 2008년 우리나라 교통사고 발 생 건수는 215,822건으로 사망자 5,870 명, 부상자 338,962명이 발생하여 차량 1만대 당 사 망자 수는 2.9명으로 OECD 국가 평균치인 1.5명보 다 약 2배 높은 수준이다. 특히 전체 교통사고 사망 자의 18.6%를 점유하는 사업용자동차는 비사업용 대비 차량 1만대 당 사망자 수가 5배가 높아 교통사 고 절감 대책이 매우 시급하다고 할 수 있다.1)
이러한 교통사고는 도로 설계상의 문제, 차량결 함, 영세한 운수업체의 경영 여건에 의한 경제적 수 지를 맞추기 위한 불가피한 차량 운행 등 상호 복합
*
Corresponding author, E-mail: [email protected]
한 요인에 의해 발생되지만, 상당 부분은 원인을 명 확히 알 수 없는 안전운전불이행이 전체 사고원인 의 55%를 점유한다.1)
이러한 교통사고 방지 대책의 일환으로 대형사고 의 위험이 높은 버스, 화물차 등 사업용 운수업체를 대상으로 정부는 제도적으로 디지털운행기록계 장 착을 의무화하였으며, 일부 운수업체는 업계 자체 적으로 차량용 블랙박스를 장착하여 운행 데이터를 분석함으로써 교통안전을 위해 운전자의 운전성향 을 파악하는데 활용하고 있다.2-6)
그러나 이러한 장치들은 과속, 급출발, 급제동 등 주로 차량의 직선 운동과 관련 된 정보를 중심으로 제공하거나, 운행 데이터 분석보다는 교통사고 분 석에 초점이 맞춘 장치들로 도로상에서 사고유발의
운전행태 감시를 위한 차량 위험운전 검지장치 연구
잠재적 요인인 운전자의 위험운전 유형을 파악하는 데 한계가 있으며, 사고율이 높은 운수업체의 안전 관리에 활용하는데 어려움이 있다.7-10)
본 연구에서는 도로상에서 발생 가능한 다양한 위험운전을 판단할 수 있는 위험운전 판단장치를 개발하고, 이를 실도로를 주행하는 운수업체 버스 들을 대상으로 장착하여 운전자의 위험운전 유형을 파악하는데 목적이 있다.
2. 위험운전 판단장치 개발 2.1 하드웨어
위험운전 판단장치는 베이스보드와 CPU 보드 로 구성되며, CPU 보드는 임베디드 컴퓨터 시스템 이고, 베이스 보드는 전체 시스템의 관리 및 위험 운전 판단 알고리즘을 연산하는 CPU 메인 모듈, 데이터 저장용 메모리 모듈, 차량의 위치정보 수집 용 GPS 모듈, 차량의 거동 판단용 센서 모듈로 구 성되어 있다(Fig. 1). 센서모듈은 오차 보정을 위한 온도센서와 노이즈 제거를 위한 필터를 포함하여 개발하였다.
종방향, 횡방향 가속도센서와 요각속도센서를 포함한 센서 모듈은 메인모듈과의 데이터 교환을 위해 RS-232 직렬통신 방식을 적용하였으며, 별도 의 CPU에서 센서 데이터의 후처리를 담당한다.2-5)
본 연구에서 개발한 위험운전 판단장치로 순간속 도, 운행거리 및 운행시간 등의 운행정보를 검출하 여 기억장치에 기록하는 전자식 운행기록계 기능도 포함하고 있다. 또한 향후 통신형 실시간 위험운전 판단장치로 기능 확장을 위하여 CDMA 모듈, 영상 및 음행 데이터 취득을 위한 모듈을 포함하여 설계 되었다. 또한 단말기는 성능 및 기능의 표준화를 위
Fig. 1 실시간 위험운전 판단장치 구성도
Fig. 2 실시간 위험운전 판단장치
하여 차량용 운행기록장치 관련 규격인 KS R 50729 를 만족하도록 개발되었다(Fig. 2).
2.2 알고리즘
위험운전 판단을 위한 알고리즘 개발을 위해 차 량 동역학 시뮬레이션과 실차 시험을 수행하고, 가 속도 센서에서 취득된 데이터 분석을 통해 차량 거 동 분석이 수행되었다.2-5) 차량의 대표적인 주행인 감속 운전행태는 종방향 가속도 센서의 데이터로 판별할 수 있다(Fig. 3).
일정속도 도달 후 제동페달을 작동하여 차량 감 속을 완료할 때까지 병진가속도는 음의 영역 데이터 유형을 확인할 수 있고, 이때 감속을 종료하는 지점 P1에서의 속도에 따라 정지상태인지 주행상태인지 를 판별하여 감속과 정지의 운전행태를 구분 할 수 있다. 또한 감속구간 T와 최소 병진가속도 P2를 조 건으로 위험운전 여부를 판단하며 차량의 출발과 가 속은 병진가속도 양의 영역에서 동일하게 판별된다.
Fig. 3 감속 운전행태의 병진가속도 데이터
Seung-Jun Hong․Lyang-Keun Lim․Ju-Taek Oh
Fig. 4 선회 운전행태의 회전각속도 및 횡방향 가속도 데 이터 유형
죄회전, 우회전 및 각종 진출입로에서의 차량 주 행 형태는 병진 가속도가 아닌 회전각속도(Yaw Rate)와 횡방향 가속도 데이터 유형을 판별하여 운 전 행태를 구분할 수 있다.
회전각속도의 음과 양의 부분은 각각 우회전과 좌회전으로 구분되어 지며 최대 회전각속도와 주기 는 위험운전의 판단 근거가 된다(Fig. 4). 차량 선회 운동 시 횡방향 가속도는 회전각속도와 동일한 유 형을 가지고 있으며, 위험운전 판단의 중요한 기준 으로 이용된다.
차량 거동해석과 실차 시험을 통해 위험운전으로 발생하는 차량 거동 형태별 이를 검출하는 센서 신 호는 크게 3가지 형태로 구분된다(Fig. 5). 따라서 데
Fig. 5 차량 거동별 센서 데이터 유형
이터의 유형, 주기 및 최대값 등을 순차적으로 모니 터링하고, 앞서 정의한 위험운전 상황별로 이를 미 리 설정한 임계값과 비교하면 위험운전 여부를 판 단 할 수 있다.
이 때 차량의 속도는 운전 형태를 분류 할 수 있는 주요 입력 신호가 된다.
2.3 임계값 설정을 위한 감성평가
위험운전을 판단하는 임계값 설정을 위해 버스를 대상으로 실차 주행 실험을 통한 임계값에 대한 평 가와 보정을 실시하였다.
선행 연구4,5)에서 개발한 위험운전 판단 알고리즘 과 임계값을 프로그램하여 탑재한 단말기를 버스에 설치하여 2009년 1월과 2월에 총 3회에 걸쳐 교통안 전공단 주행시험장 내 종합시험로, 선회시험로 및 고속주행로에서 각각 20~30대 청년층, 40~50대 장 년층 및 60대 고령자를 포함하여 연령대별 운전 유 형별 주행 실험을 복합적으로 실시하였다.
다음 Photo. 6과 7은 주행시험장에서 피험자들이 탑승한 버스와 운전 유형별 주행실험 후 설문 조사 를 실시하는 모습을 각각 보이고 있다.
Table 1은 운전 유형별 주행 시나리오를 보이고 있다. 모두 7종의 운전 유형별 주행 강도를 조절하 여 도출한 실시간 위험운전 판단장치의 센서 데이 터와 그때의 설문 결과를 비교하여 결과를 도출하 였다.
본 연구에서는 연령별 각 파라미터들의 차이가 발생하였는지 판단하기 위하여 독립표본 t-검증과 ANOVA 검증을 실시하였으며, 독립변수들 간의 상 관관계 분석을 이용하여 실험집단의 특성을 파악하 였다. 또한, 동일한 통제실험이 진행되었는지를 확 인하기 위하여 각각의 실험에서 적용된 critical ax, critical yaw rate, critical ay값의 평균차이를 비교하 여 동일한 조건으로 실험이 되었는지를 확인하고, 각 실험의 피실험자들의 반응은 동일조건에서 실시 한 실험인원이 서로 다르므로 각 조건에서 실험에 참여한 총인원 중에서 불쾌함을 느끼지 않은 인원 의 비율을 산정하여 비율이 차이가 발생하였는지를 검정하였다. Table 2는 분석에 사용된 변수를 보이 고 있다.
A Study on In-vehicle Aggressive Driving Detection Recorder System for Monitoring on Drivers' Behavior
Table 1 운전 유형별 주행 시나리오
운전 유형 형태
급출발
정지상태에서 출발하여 목표 속도까지 가속하는
주행 유형
정지상태에서 60km/h까지 도달하는 실험을 12회의 반복실험
급정지
속도 60 KPH 주행 중 브레이크를 작동하여 차량을 정지하는 주행
유형
60m/h로 주행중 정지상태 까지의 실험을 12회 반복 실험
급차선 변경
30m의 거리를 50, 60, 70, 80, 90Km/h으로
나누어 차선변경
50km/h 로 변경 60km/h 로 변경 70km/h 로 변경 80km/h 로 변경 90km/h 로 변경
연속적인 급차선
변경
70m의 거리를 50, 60, 70, 80, 90Km/h으로
나누어 차선변경
50km/h 로 변경 60km/h 로 변경 70km/h 로 변경 80km/h 로 변경 90km/h 로 변경
선회구간 과속
선회구간을 일정한 속도로 주행 유형
40km/h 선회 45km/h 선회 50km/h 선회 55km/h 선회 60km/h 선회
급감속
속도 100 KPH 주행 중 브레이크를 작동하여 속도를 40KPH로 유지하는 주행 유형
100km/h로 주행중 40km/h의 속도까지
도달하는 실험을 12회 반복실험
급가속
속도 40KPH에서 100KPH까지 가속하는 주행 유형
40km/h로 주행중 100km/h의 속도까지
도달하는 실험을 12회 반복실험
Photo. 1 주행실험 중인 버스
연령별 각 파라미터들의 차이가 발생하였는지 판 단하기 위하여 독립표본 t-검증을 20대와 40대, 20대
Photo. 2 설문조사 모습
Table 2 표준차이 검정을 위한 변수
비교변수 처리변수
연령별 급출발에 대한 만족비율 가속도 연령별 급정지에 대한 만족비율 가속도 연령별 선회에 대한 만족비율 yaw rate, ay 연령별 가속에 대한 만족비율 가속도 연령별 감속에 대한 만족비율 가속도 연령별 차선변경에 대한 만족비율 yaw rate, ay 연령별 연속차선 변경에 대한 만족비율 yaw rate, ay
와 60대, 40대와 60대의 연령별로 비교하고, 30세와 50세를 전후로 나누어 비교도 하였다. 분석 결과 연 령별로 각 변수간의 차이는 없는 것으로 분석되었다.
아래 Table 3은 연령대별 평균 임계값을 보이고 있다.
연령대별 각 변수들의 상관분석을 실시한 결과를
Table 3 연령대별 위험운전 평균 임계값 위험운전
행태 변수(단위) 20~30대 40~50대 60대 이상 급출발 ax(G) 0.13 0.14 0.14 급정지 ax(G) -0.435 -0.5 -0.436 선회 중
가속
yaw-rate
(deg/sec) -14.612 -15.36 -15.93 ay(G) -0.382 -0.465 -0.465
급가속 ax(G) 0.07 0.1 0.09
급감속 ax(G) -0.46 -0.4025 -0.4
차선변경
yaw-rate
(deg/sec) 0.226 0.238 0.196 ay(G) 3.918 4.5 3.47 연속적인
차선변경
yaw-rate
(deg/sec) 0.25 0.258 0.26 ay(G) 4.64 5.27 5.03
홍승준․임양근․오주택
종합해 보면 3가지의 공통점을 찾을 수 있다. 첫째, 속도의 변화가 커지는 경우의(감속 또는 가속의 절 대값이 커지는 경우) 불쾌감은 모든 연령대에서 발 생하는 것으로 판단되며, 이는 급격한 속도변화에 대한 불쾌감이 발생하는 것을 반영한 것이다. 둘째, 선회의 경우 yaw rate와 ay의 두 가지 설명 파라미터 가 발생하며, 이러한 경우에도 각의 변화와 이동거 리가 충분히 길수록 불쾌감이 적어지는 것으로 나 타난다. 마지막으로 차선을 변경할 경우 yaw rate와 ay의 두 가지 설명 파라미터가 발생하며, 차선 변경 시에는 각의 변화와 이동거리가 짧을수록 만족감이 높아지는 것을 알 수 있다. 연령대별로 상관분석을 실시한 결과 20대의 경우 급가속에 만족도가 높은 경우 급감속에 불만족도 높았으며, 40대의 경우는 특징이 없었으며, 60대의 경우 감속에 만족도가 높 은 경우 연속차선변경에 대한 불쾌감이 높아지는 것으로 분석되었다.
3. 실도로 주행실험 및 결과 3.1 실도로 주행실험
개발된 위험운전 판단장치를 국내 여행사 소속 관광버스 50대에 알고리즘 개발 시 단말기 장착 위 치와 동일한 위치에 장착하였다.
1개월간 위험운전 판단장치를 활용 위험운전 10 개 유형, 16,236건의 데이터를 취득하였다.
Photo. 3 위험운전 단말기 실차 장착
3.2 위험운전 유형별 발생 특성
위험운전 유형별 분석결과, 급차선 변경(7번 위 험운전)이 54.4%로 가장 높으며, 선회구간 과속, 급 감속 후 급회전 순으로 나타났다.
Fig. 6 위험운전 유형별 발생 건수
주) 2.선회구간 과속 3.급출발 4.급가속 5.급정지 6.급감속 7.급차선변경 8.연속적인 급차선변경
14.급감속+급차선변경 15.급감속+연속적인 급차선 변경 16.급감속+급회전
Fig. 7 위험운전 유형별 발생 비율
3.3 차량 운행속도별 위험운전 발생 특성 실험대상 버스는 0~10 km/h와 10~20km/h에서 각 각 10.3%, 10.6%를 보이며 20~30km/h에서는 28.0%
의 발생 건수를 보여 전체 위험운전 중 30km/h이하 에서 49.1%를 보이고 있다.
특히, 저속인 20km/h이하에서 급출발, 급가속 및 급정지 등이 빈번하게 발생하고 있음을 알 수 있다.
Fig. 8 속도대별 위험운전 발생 건수
운전행태 감시를 위한 차량 위험운전 검지장치 연구
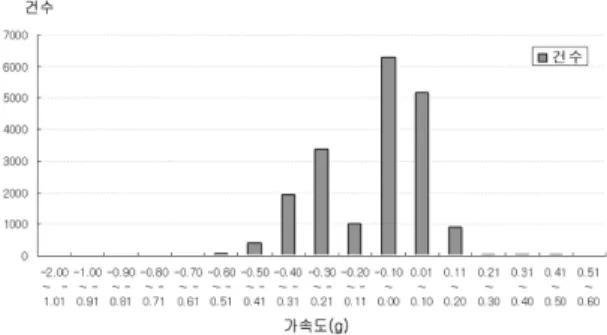
3.4 위험운전 시 가속도 특성
실험대상 버스의 위험운전 발생 시 종방향 가속 도(G)는 음(-)의 방향에 상대적으로 넓게 분포하고 가속도 심도도 현저히 높은 것으로 분석되었다.
따라서 실험대상 버스는 가속보다는 감속과 관련 된 위험운전 발생이 높은 것은 것으로 판단되었다.
Fig. 9 위험운전시 종방향 가속도(ax) 분포
3.5 위험운전 시 각속도 특성
실험대상 버스의 위험운전 발생시 각가속도(yaw rate) 발생건수는 차량의 좌회전 방향인 음(-)의 방향 에 상대적으로 많이 분포했고, yaw rate 30이상의 건 수는 현저한 차이가 있는 것으로 분석되었다
따라서 실험대상 버스들은 우회전 대비 좌회전시 위험운전 발생률이 높고, 위험운전 심도가 더 강한 것으로 판단된다.
Fig. 10 위험운전시 각가속도(yaw rate) 분포
4. 결 론
본 연구는 차량 동역학 시뮬레이션, 실차 실험 및 피검자 대상 감성평가를 통해 위험운전 판단 알고
리즘과 이를 내장한 위험운전 판단 단말기를 개발 하고, 개발된 단말기를 실도로를 운행하는 운수업 체 버스에 장착하여 운전자 위험운전 유형을 분석 하고 다음과 같은 결론을 얻었다.
1) 선행 연구에서 개발된 위험운전판단 알고리즘 은 가속도 센서의 진행방향의 병진가속도, 횡방 향 가속도와 회전각속도 센서의 yaw rate의 데이 터 유형을 판별하여 다양한 운전 행태를 판별한 다. 또한 위험운전의 객관적이고 신뢰성이 있는 판별을 위하여 운전 행태별 위험운전 판단 근거 인 데이터의 임계값을 차량 동역학 시뮬레이션 과 실차 주행 실험을 통하여 정의하였다.
2) 개발되어진 위험운전 판단 알고리즘의 판별 임 계값의 유효성 검증 평가와 보정을 위하여 주행 시험장에서 다양한 연령대별 피험자를 대상으 로 설문과 단말기로부터 상황별 데이터를 분석 을 통한 위험운전 판단 기준인 임계값의 타당성 을 인간공학적으로 검토하였으며, 객관성을 확 보하였다.
3) 실차 시험을 통하여 검출된 위험운전 건수를 유 형별로 분류해 본 결과 급차선 변경이 54.4%로 가장 높은 빈도를 보였다.
4) 위험운전이 발생하는 속도별로 위험운전을 분 석한 결과 전체 위험운전의 절반가량인 49.1%가 차량속도 30km/h 이하에서 발생하여, 실험대상 차량들은 저속상태에서 위험운전 발생률이 높 은 것으로 분석되었다.
5) 위험운전의 가속도 분포 분석결과 차량의 가속 시 대비 감속시 발생한 가속도 발생률이 높고, 위 험운전 중 발생한 각가속도 분포는 우회전시 대 비 좌회전 시 발생한 비율이 높은 것으로 분석되 었다.
후 기
본 연구는 국토해양부 건설기술혁신사업의 연구 비 지원에 의해 수행되었습니다.
References
1) Korea National Police Agency, Traffic Accident Statistics, pp.148-149, 2006.
Seung-Jun Hong․Lyang-Keun Lim․Ju-Taek Oh
2) J. H. Cho, J. Y. Lee, W. S. Lee, S. J. Hong and L. G. Lim, “Development of a Safe Driving Management Systemk,” Proceedings of KSAE Conference, pp.576-581, 2003.
3) W. S. Lee and J. H. Cho, “Development of a Safe Driving Management System,” Transac- tions of KSAE, Vol.15, No.1, pp.71-77, 2007.
4) J. T. Oh, J. H. Cho, S. Y. Lee and Y. S. Kim,
“Development of a Data-logger Classifying Dangerous Driving Behaviors,” The Journal of Korea Institute of Intelligent Transport Sys- tems, Vol.7, No.3, pp.15-28, 2008.
5) J. T. Oh, J. H. Cho, S. Y. Lee and Y. S. Kim,
“Development of a Critical Value according to Dangerous Driving Behaviors,” Journal of Korean Society of Road Engineering, Vol.11, No.1, pp.69-83, 2009.
6) I. H. Han and K. S. Yang, “Recognition of Dangerous Driving Using Automobile Black Boxes,” Journal of Korean Society of Trans- portation, Vol.25, No.5, pp.149-160, 2007.
7) T. D. Wada, S. Imai, K. Tsuru, N. Isaji and H.
Kaneko, “Analysis of Drivers' Behaviors in Car Following Based on a Performance Index for Approach and Alienation,” Proc. SAE World Congress & Exhibition, pp.59-74, 2007.
8) T. Toledo, O. Musicant and T. Lotan, “In- vehicle Data Recorders for Monitoring and Feedback on Drivers' Behavior,” Transportation Research Part C, Vol.16, No.3, pp.320-331, 2008.
9) T. Lotan and T. Toledo, “An In-vehicle Data Recorder for Evaluation of Driving Behavior and Safety,” Transportation Research Record:
Journal of the Transportation Research Board, No.1953, pp.112-119, 2006.
10) O. Musicant, T. Lotan and T. Toledo, “Safety Correlation and Implications of an In-vehicle Data Recorder on Driver Behavior,” Preprints of the 86th Transportation Research Board Annual Meeting, Washington DC, 2007.