협소구역 수직 주행을 위한 지형 적응/인지 이동 로봇의 설계
김태현
†
· 양현석* · 박노철**Design of Mobile Adaptation/Sensing Robot for Vertical Passage in Narrow Space
Taehyun Kim, Hyunseok Yang and Nocheol Park
Key Words : In-pipe Robot(관내주행로봇), Vertical narrow space(수직협소구역), Mobile robot(이동 로봇), Terrain- adaptation(지형적응)
Abstract
The robot for narrow space is used in searching, investigating or cleaning. Up to now variety of researches on in-pipe robots have been introduced. However it is still hard to overcome vertical or curved passage. In most cases of narrow space robots are able to travel just aimed diameter which was selected when those are developed. Also, a large percentage of robots are not able to detect the configuration of pipe or circumstance.
In this paper we present a robot called PAROYSⅡ for narrow space with vertical and curved passage. This proposed robot is not affected at all to variance of pipes, vertical or horizontal passages, curved pipes, projecting parts and parallel planes. In addition to that, it will perceive the internal configuration of pipe and terrain, which will be not only available to control navigating scheme by itself, but also mappable about the passage which the robot traveled. Core points in the design and structure are introduced and preliminary verification is given.
1. 서 론
배관이나 협소구역을 주행하는 로봇은 여러 연 구를 통해 소개 되고 있으나 아직은 많은 문제점 을 가지고 있어 충분한 기능을 다 하지 못하고 있 다 . 배관이나 협소구역은 다른 지형에 비하여 로 봇의 움직임에 대한 제한이 많고, 통신 문제, 외부 에서 로봇의 실제 움직임을 파악하기 어려움 등의 문제로 이동로봇이 협소 구역에서의 성능 구현에 한계가 있다.
기존에 국내외에 발표된 다양한 메커니즘을 활
용한 관내 주행로봇이 있으나, 이들 대부분은 수 평관에서의 주행은 원활하나, 곡 관, 분기 관, 직 각 관 등에서의 주행이 원활하지 않고, 수직 관을 주행 가능한 로봇은 많지 않다. 뿐만 아니라 관의 직경이 변화하는 경우나 수직이며 구부러진 행로 를 가진 경우에 대한 고려는 그리 많지 않은 것이 사실이다. 또한, 탐사 시 로봇이 접근할 수 있는 영역을 넓히기 위해서는 평지와 수직통로 모두를 극복할 수 있는 메커니즘이 필요하다.
1.1 기 개발 로봇에 대한 요약
이 같은 필요에 따라 이전의 논문을 통해, 연구 발표하였던 Paroys-Ⅰ이라 명명된 로봇이 있다. 다 관절 탐사로봇이 평지에서도 이동이 가능하고 수 직으로 서있는 파이프 배관에서도 이동이 가능하 도록 하는 새로운 메커니즘을 제시하였었다. 이 로봇에 대한 간략한 설명을 하고, 이어 이 로봇으 로부터 지금의 로봇을 개발 하게 된 연유를 설명
† 책임저자, 회원, 연세대학교 기계공학부 E-mail : [email protected]
TEL : (02)2123-2824 FAX : (02)364-6769
*
회원, 연세대학교 기계공학부
** 회원, 연세대학교 기계공학부
1173
Fig. 1 Paroys-Ⅰ 하고자 한다.
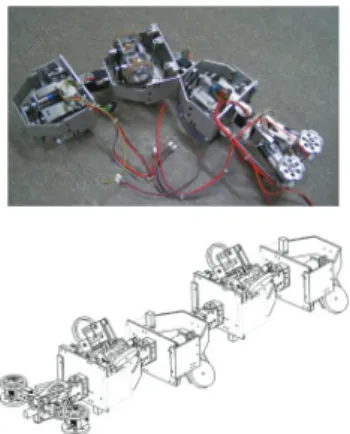
Fig.1 의 로봇은 기 개발된 로봇인 Paroys-Ⅰ이다.
Paroys-Ⅰ은 직경 φ 200 정도의 관의 주행에 맞추 어 설계 되었다. 기구적인 특징으로는 active joint 와 active wheel 로 구성되었으며, 평지와 관내에서 모두 주행이 가능하다는 특이점이 있다. 많은 관 내 주행에 초점을 맞추어 개발된 로봇이 평지에서 는 주행능력을 상실하는 것과 비교되는 Paroys-Ⅰ 의 장점이다. 또한 많은 부분에서 구동기의 수를 줄임으로써 중량에 대한 이득을 많이 거두었다.
하나의 구동기축에 타이밍벨트를 이용하여 양측의 바퀴를 동시에 구동하도록 하였다. 그리고 둘째, 바퀴는 첫 번째, 세 번째 모듈은 밑부분에, 두 번 째 , 네 번째 모듈은 윗부분에 위치하도록 하여 모 듈 하나에 대한 무게를 줄이고, 파이프 배관에서 네 방향으로 힘을 전달할 수 있도록 하였다. 그리 고 주행 면에 대한 수직항력의 극대화를 위하여 4 절 링크를 이용하여 φ 200 내외의 다른 직경의 관 에서도 항상 접촉면에 수직하여 바퀴가 접할 수 있도록 구성 한 것이 특징이다. 실 제작을 하여 실험을 통한 결과는 만족스러웠으나, 기존의 관내 주행 로봇이 그러하듯, 수직 곡관과 직각관에서의 주행 등, 로봇이 구현 가능한 능력의 한계가 있었 다 . 본 논문에서는 이러한 한계를 극복하기 위하 여 차기 개발된 Paroys-Ⅱ의 기계적인 구성과 메 커니즘 , 특징에 대하여 이전의 로봇과의 차이에 기해 기술하였다.
2. 적응 메커니즘
2.1 적응 메커니즘의 개략
우선 이전의 로봇에서 가장 큰 문제라고 생각되
Fig. 2 Paroys-Ⅱ
었던 부분은 직경의 변화에 대하여 수동적으로 적 응할 수 없었던 부분이다. 이 점은 여타 관내 주 행로봇이나 , 협소구역 로봇도 가지고 있는 문제점 이다. 직경의 변화에 적응하는 로봇은 수동 적응 력이 없고, 수동적응력을 가진 로봇은 적응할 수 있는 관의 직경에 한계가 있다.
본 논문에서 소개하는 Paroys-Ⅱ는 연결부위를 active joint 와 passive joint 를 복합 사용하여 hybrid joint 를 구성하였다. 각각의 다양한 직경에 대응하 기 위하여 active joint 를 이용하여 직경변화가 상 대적으로 큰 관에서의 적응성을 높이면서, 주행성 능이 가장 좋은 최적의 접촉상태를 passive joint 로 찾음으로써 기구에 무리한 힘을 주지 않고 기구 제어의 편의성을 도모하였다.
2.2 진행 방향에 대한 적응
Paroys-Ⅰ에서는 로봇의 지면과 관 내부 면, 평 행 협소 면에서의 주행 능력을 모두 만족시키기 위하여 두 개의 바퀴가 일측면에 장착된 모듈을 Active Joint 를 사용하여 상하 교차 부착하여 구성 하였다. 중량을 감소하기 위하여 주행을 위한 최 소 수량의 바퀴만을 이용하여 적응하며, 원하는 방향으로 조향하기 위한 방법이었다. 이 바퀴들은 4-bar link 를 이용하여 φ 190~210 내외의 직경에 적 응하기 위하여 직경방향으로 확장이 가능하면서, 평지에서 주행이 가능하도록 해주었다. 그러나 이 러한 구조는 수직주행을 위하여 관 내부 면에 수
Fig. 3 One side module of Paroys-Ⅱ
11743
3
(a)
(b)
Fig. 4 Center gear module of Paroys-Ⅱ(a) and hybrid joint for pantograph (b)
직항력을 가할 때나 평지 주행 시, 항시 연결부 active joint 에 무리한 토크가 발생하였고, 구조적으 로 좋지 못한 능력을 보였다. 또한 4 점 지지는 관 내부 면에 4 점에 힘이 고르게 분포되도록 하기 힘들었고 , 이는 최적의 접촉 상태를 얻지 못하는 문제를 발생함을 확인하였다.
직경 확장성에 대한 장점은 유지하며, 연결부 위에 토크를 발생시키지 않으며, 모든 접촉 점이 고른 접지력을 확보하도록 구성하기 위하여 hybrid joint 를 사용하였다. 기구의 주행 가능 반경 은 pantograph mechanism 을 기반으로 길이의 확장 성능을 가진다. pantograph mechanism 의 구현은 기어로 구동되는 lead screw 를 사용하였다. Fig. 4(a) 을 보면, 중앙에 위치하는 구동기에 pinion 이 장 착되어 구동하고, gear 가 달린 세 개의 lead screw 가 동시에 연동되면서 작동한다. 하나의 구동기로 세 개의 pantograph mechanism 을 구동하기 때문에 중량에서의 이득을 얻을 수 있다. lead screw 의 직 동기구 (screw nut)와 pantograph 링크의 끝 단은 스 프링을 통해 연결되어 있어서(Fig.4 (b)), suspension 으로서의 역할과 갑작스러운 돌출이나 미소 변량 에 대처하도록 구성하였다.
pantograph mechanism 의 끝 단은 자유 회전조인 트와 potentiometer 를 이용하여 현재의 트랙의 각, 로봇의 기울어짐을 추정할 수 있도록 하고 pantograph mechanism 의 link 와 track module 사이에 압축 스프링을 사용하여 복원력을 가지도록 구성 하였다.
2.3 지면 방향에 대한 적응
Paroys-Ⅰ의 가장 큰 특징중의 하나는 평지에서
Fig. 5 Condition of track adjustment about ground 도 주행이 가능하다는 점이었다. 지금까지 발표된 대부분의 관내 주행로봇은 원형 관에 초점을 맞추 어 설계 되어서 평지나 평행면에서는 주행능력을 상실한다 . 지하매설구조에는 원형 관이 많이 사용 되나, 건물내부나 지상 구조물의 경우에는 환기 덕트 , 전산망 부스 등은 사각 관으로 만들어 져있 기 때문에 평지에서의 운동능력은 고려하여야 할 부분이다. 뿐만 아니라 관내에서 주행을 마치고, 평지로 나오는 경우나, 평지에서 관내로 투입되는 경우에도 평지에서의 운동능력은 반드시 필요하다.
이번 연구에서도 이러한 이전 로봇의 장점을 이 어나가기 위하여 로봇이 주행 면에 수동적으로 적 응 할 수 있도록 구성하였다. 이전에는 능동적으 로 적응하도록 구성하였으나, 능동 구동은 외부 적응력에 있어서 수동 적응에 비하여 능력과 효율 이 떨어지기 때문에 수동 적응 구조를 사용하였다.
passive adaptive joint 를 사용하기 때문에 임의의 추 종 각도를 제어할 수 없어서 비 제어 상태에서 가 장 안정적으로 대처할 수 있는 구조를 고안하는 것이 중요하다. track 의 폭이 높이에 비하여 넓지 않기 때문에 지면에 로봇이 놓였을 경우, hinge 를 기준으로 track 면이 바닥을 향하도록 구성하는 것 이 설계 시 고려된 부분이다(Fig.5). 현재 설계의 상태에서 정역학분석에 따라 계산 상에서는 의도 하는 움직임이 예상되지만, 실제 모델에서 예기치 않은 문제나 변수가 작용할 경우 보조 guide 를 사 용하여 보정할 수도 있다. 지면에 적응된 회전 각 에 대한 정보는 관내 형상 인지와 mapping 에 사 용하기 위하여 potentiometer 를 장착하여 정보를 받을 수 있도록 구성하였다.
3. 구동 메커니즘
3.1 구동부의 설계
이전 로봇의 구동에서의 장점은 하나의 모터를 사용하여 두 개의 바퀴를 구동하여 중량에서
1175
Fig. 6 Coupled driving track module
이득을 보았다. 그러나, 이에 따라 곡관이나 회전 주행 시 양측의 바퀴의 구동속도에 차이를 주지 못하는 한계가 있었다. 또한, 바퀴를 사용한 구조가 곡관이나 직각관, 돌출이 있는 면에서의 주행이 원활하지 못하다는 결과를 얻었다.
때문에 Paroys-Ⅱ에서는 이전의 장점이었던 동기 구동을 통한 중량 감소의 방법을 사용하면서, 다양한 지형에서 운동능력을 발휘할 수 있는 track 구조를 고안하여 구성한다. 구동 모터 하나로 세 개의 track 을 동시 구동할 수 있도록 구성하고,
구조적인 간단화와 운동성에 장애가 되는
배선문제를 해결하기 위하여 구동부 내부에 모터와 전원, 제어 장치를 장착하여 통신을 위한 통신 와이어만 외부로 나오도록 고안한다. track 내부에 가능한 많은 장치를 실장 하는 것은 로봇이 수직 벽을 주행하는 데에 있어서도 큰 도움이 된다. 가능한 많은 무게를 지지면 측으로 부착시킴으로써 이동에서 발생할 수 있는 moment 를 최소화 할 수 있다.
구동부는 추진장치 이외에도 관형상 인지를 위한 인지 장치로 사용되기 때문에 전부와 후부의 분리된 track 형태를 가지고 있다. 이에 따라 분리된 track 에 구동력을 손실 없이 전달하면서, 전측의 track 을 active 하게 상하로 움직일 수 있는 구조이어야 한다. 때문에 기어열을 이용하여 이를 구현하도록 한다.
N
1μ μ N
2N
3 3μ μ N
N
3'μ
N
1μ μ N
2N
3 3μ μ N
N
3'μ
Fig. 7 Traction force of Paroys-Ⅱ
때문에 로봇의 견인력에 대한 고려가 매우 중요하다 . 때문에 정역학 해석을 통하여 로봇이 수직으로 서있는 배관 안을 주행할 때 필요한, 벽면으로 밀어주는 힘을 구하였다. 이는 결국 pantograph 를 확장하는 역할을 하는 lead screw 구동기와 spring 의 강성을 선정함에 있어 중요한 인자가 된다.
Fig.7 에서 로봇 전체의 무게를 m 이라 하고, 마찰계수가 μ 인 수직으로 서있는 관을 주행한다고 가정할 때에 관계식은 다음과 같다.
0
( ) 3
m g a r
+ ≤ τ (1)
1 2 3
( ) ( )
m g a + ≤ μ N + N + N (2)
로봇이 등속운동하고 로봇의 질량이 10kg이고, 바퀴의 반지름이 50mm이며, 마찰계수가 0.4이고, 세 방향의 track이 중심에서 벽에 가하는 수직항력이 모두 동일하다고 가정하였을 때 라면
0.8175 Nm
τ
≥, N
≥81.75 N이라는 결과를 얻을 수 있다.
3.3 수직항력 발생을 위한 기구해석
확장을 위한 메커니즘으로 pantograph mechanism 이 사용되고, 이를 이용하여 수직항력을 발생하게 된다. pantograph mechanism 의 lead screw 측의 끝 단에는 미소변량에 적응하기 위한 spring 구조가 장착되어 있다. 예상되는 수직항력을 역산하여 적 절한 강도의 spring 이 선정되어야 원하는 기능을 발휘 할 수 있다. 즉, spring 을 포함하지 않은 기구 의 정역학 해석에서 얻어지는 끝 단의 반발력 크 기 이상의 강성을 가지고 있어야 suspension 의 역
JC1
JR1
L1FJR1x
− FJR1y
+ P
JL1
Ry
FJC1x
−
FJL1x
+ JR1
JL2 L4
F1
Rx
FJC2y
−
FJL2x +
FJR1x
+
FJC2x
−
FJL2y
FJR1y
−
FJC2x
+
JR2 JC2
F2 Ry
Rx
FJR2x
+ FJC2y
+
FJR2y
+ L3 FJC1x
+ FJC1y
L2 + FJC1y
−
FJL1x
− FJL1y
−
Fig. 8 Static Analysis of link for normal force
11765
5 할을 하여 적응력을 가질 수 있다. Fig. 8 에서는 각 link 의 정역학 해석을 위한 자유물체도를 제시 하고 있다.
자유물체도에 따라 정역학 해석을 하면 다음과 같다 .
JC1 JR1 0 JC1 JR1 0
@JC1 JR1 JR1 0 F x F x F x
F y F y F y P M R F y x R F x y
Σ = − =
Σ = − − =
Σ = + =
Link 1
(3)
JC1 JL1 0 JC1 JL1 0
@JC1 JL1 JL1 0 F x F x F x
F y F y F y P
M R F R F
y x x y
Σ =− + =
Σ =− − − =
Σ = − =
Link 2
(4)
JL1 JC2 JR2 2 0 JL1 JC2 JR2 0
@JR2 JC2 JC2
2 JL1 2 JL1 0
F x F x F x F x F F y F y F y F y
M R F R F
y x x y
R F y x R F x y
Σ =− + + − =
Σ =− + + =
Σ = − −
− − =
Link 3
(5)
JL2 JC2 JR1 1 0 JL2 JC2 JR1 0
@JL2 JC2 JC2
2 JR1 2 JR1 0
F x F x F x F x F F y F y F y F y M R F y x R F x y
R F y x R F x y
Σ = − + − =
Σ = − − =
Σ = − +
− − =
Link 4
(6)
4. 센싱 메커니즘 & Mapping
대부분의 로봇은 스스로 관의 형상을 인지하지 못하고 , 사용자가 수동 조작해 주어야 한다. 이러 한 방법은 구동에도 한계가 있을 뿐 아니라 통신 이 어려운 지하나 수중의 경우에는 적합하지 못하 다. 때문에 협소구역 이동 로봇 스스로 인지하고 판단하여 주행하는 기술이 필요하나, 현재까지 관 의 형상을 인지하거나 적응하여 그에 따라 자율 주행하는 로봇은 많지 않다.
본 논문에서는 로봇이 외부의 지면의 형상을 대 략적으로 인지하고, 이에 따라 스스로 적응하는 방법을 제안한다.
4.1 관 내부 직경 인지
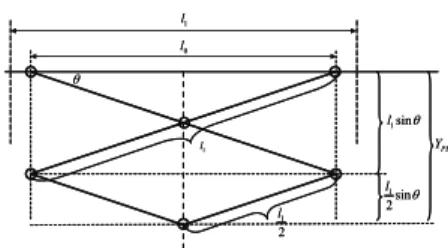
현재 반경 방향으로 확장한 pantograph 를 구동 한 모터의 회전 정보를 이용하면 관 내부의 직경
θ
l1
1
2 l l0
l1
1sin
l
θ
1sin 2
l
θ
YPE
θ
l1
1
2 l l0
l1
1sin
l
θ
1sin 2
l
θ
YPE
Fig. 9 Position analysis of pantograph
에 대한 정보를 취할 수 있다. 그러나 pantograph mechanism 은 기구의 링크 간의 끼인 각에 따라 끝 단의 속도가 달라지게 되어있다. 때문에 이에 대한 해석은 관의 직경을 정확히 알기 위하여 필 요하다.
Fig.9 는 pantograph 형상을 간략하여 도식화 한 것이다 . 이를 통해 lead screw 의 중심으로부터 pantograph mechanism 의 끝 단까지의 거리를 계산 할 수 있다. 다음은 pantograph 의 끝 단 거리에 대 한 관계식이다.
0 1
1 0
1
1 1
cos 2 cos 1 2
sin 2
Nut
Nut
nut nut
l l l l X
l X
X X
l l
θ θ θ
2
=
− =
= −
⎛ ⎞
= − ⎜ ⎟
⎝ ⎠
(7)
1
1
3 sin 2 3
PE
nut nut
Y l
l X X θ
2
=
= −
(8)
X nut 은 lead screw nut 의 이동거리이다. 이를 lead screw 를 구동하는 구동기의 회전에 대한 변수 로 바꾸어 주면 다음과 같이 유도된다.
[ ] [ ]
X nut = × n pitch × N (9)
따라서 Y PE 를 lead screw 의 회전에 대하여 미분 하여 구동기 회전 속도에 대한 식을 유도할 수 있 다.
( )
( )
1 1 2
1
3 ( [ ] [ ]) ( [ ] [ ]) 2
([ ] [ ]) 2( [ ] [ ]) [ ] [ ] dY PE
l n p N n p N dn
l p N n p N p N
2 −
= ⋅ ⋅ − ⋅ ⋅
⋅ ⋅ − ⋅ ⋅ ⋅ ⋅
(10)
4.2 관 내부 형상 인지
Paroys-Ⅱ는 주행을 위하여 사용되는 track 을 전 부와 후부로 나누어 rotational hybrid joint 를 가지도
1177
Fig. 10 Sensing mechanism of track
록 하여, 두 개의 track 이 조합된 구조를 가진 구 동부를 이용하여 관의 형상을 인지하는 구조를 가 지고 있다. 이에 대하여 Fig. 10 에 제시되어있다.
회전 joints 의 내부에는 전측 track 의 몸체와 연결 된 torsional spring 이 있고 torsional spring 의 다른 끝 단에는 servo motor 의 출력 단이 연결되도록 한다. 이 servo motor 를 이용하여 전측 track 의 각 을 정하여 가하고, 이에 대한 실제 회전각은 potentiometer 를 이용하여 측정할 수 있다. 이를 이용하여 servo motor 의 입력 각과 potentiometer 의 출력 각의 차이를 통해, 현재 전측 track 에 가하여 지고 있는 torque 를 추산할 수 있고, 이를 통해 곡관/분기관의 유무, 돌출부 등의 현재 지형의 구 조를 추정할 수 있다. 추가적으로 초음파 센서와 적외선 센서를 병행 사용하여 관 내부 형상에 대 한 데이터 보정을 할 수 있다.
뿐만 아니라, pantograph mechanism 끝 단과 track 사이에 장착된 2 축의 potentiometer 를 이용하여 관 내부 형상이나 주행통로에 대하여 입체적으로 정보를 수집할 수 있다.
4.3 관의 배치 추정 mapping
공사 현장이나 배관이 얽힌 지역에서는 현재의 매설된 관의 배치나 구조를 알 수 있는 방법이 없 다 . 또한, 건물의 붕괴현장이나 화재현장에 투입된 로봇의 경우, 로봇이 현재 진행한 궤적에 대한 정 보가 매우 중요하게 사용될 수 있다. 로봇이 수집 한 현재 관내 형상의 구조 추정데이터와 트랙구동 에 따른 이동거리, inclinometer 를 사용한 pitch, yaw, roll 에 대한 정보, 그리고 gyro 를 이용한 이동 odometry 에 대한 정보를 분석하여 계산하면, 관의 배치나 구조의 mapping 이 가능 할 것이다.
을 이용하여 제안된 메커니즘에 대한 검증을 하였 다 . 그러나 앞으로 실제 제작된 모델을 통한 시험 과 제어를 통해 보다 확실한 결과를 얻고자 한다.
현재 설계된 모델은 제작 중이며, 이후 실제 모델 을 토대로 지형 적응 알고리즘과 관내 형상 구조 추정데이터를 바탕으로, gyro 를 이용한 odometry 추정 등을 통하여 mapping program 을 개발 예정이 다 .
참고문헌
(1) J. S. Lee, S. H. Kim, H. S. Yang, N. C. Park, 2005,
“Design of Articulated Mobile Robot to Overcome Vertical Passages in Narrow Space” 05 spring conference KSPE, p.806~811(6)
(2) Tokuji Okada, Tsuyoshi Sanemori, 1987,
“MOGRER: A Vehicle Study and Realization for In-Pipe Inspection Tasks” IEEE Journal of Robotics and Automation, Vol. RA-3, No.6 p.573 ~ 582 (3) Shigeo Hirose, Hidetaka Ohno, Takeo Mitsui,
Kiichi Suyama, 1999, “Design of In-pipe inspection Vehicles for ϕ25,ϕ50,ϕ150 pipes” IEEE International Conference on Robotics and Automation, Vol. 3 p2309-14.
(4) Majid Mohammady Moghaddam, Mohammad Reza Arbab Tafti, 2005, “Design, Modeling and Prototyp- ing of Pipe Inspection Robot” 22nd International Symposium on Automation and Robotics in Construction ISARC 2005 - September 11-14, Ferrara(Italy)
(5) Oya, Tomoyasu; Okada, Tokuji,2005,
"Development of a steerable, wheel-type, in-pipe robot and its path planning", Advanced Robotics, Vol.
19, No. 6, 2005, p. 635~650
(6) Se-gon Roh, Hyouk Ryeol Choi,2005,
"Differential-drive in-pipe robot for moving inside urban gas pipelines", IEEE Transactions on Robotics and Automation, Vol. 21, Issue: 1, p.1~ 17
1178