고온 환경 단조공정 자동화를 위한
수직다관절 로봇의 실시간 작업경로 제어에 관한 연구
A Study on Real Time Working Path Control of
Vertical Articulated Robot for Forging Process Automation in High Temperature Environments
조상영1*, 김민성1, 도기훈1, 한성현2, 하언태3, 심현섭3, 임창식4
Sang-Young Jo1, Min-Seong Kim1, Ki-Hoon Do1, Sung-Hyun Han2 Un-Tae Ha3, Hyun-Suk Shim3, Chang-Sik Lim4
<Abstract>
This study proposes a new approach to control a trajectory control of vertical type articulated robot arm with six revolution joints by computed torque method for manufacturing process automation. The proposed control scheme takes advantage of the properties of the fuzzy controllers. The proposed method is suitable to control of the trajectory and path control in cartesian space for vertical type articulated robot manipulator for forging manufacturing process automation. The results is illustrated that the proposed fuzzy computed torque controller is more stable and robust than the conventional computed torque controller. This study is included with an analytical methodology of inverse kinematic computation for 6 DOF manipulators. And an intelligent PID based on feed forward fuzzy control structure is applied to control the working path control with disturbances caused by uncertainty parameters of the manipulator dynamic model. Lastly, the validity of proposed is verified by simulations and experiments.
Keywords : High temperature environment, Forging process, Working path control, Fuzzy control
1*정회원, 교신저자, 경남대학교 대학원 석사과정 (E-mail: [email protected])
2 정회원, 경남대학교 기계공학부 교수 3 정회원, 경남대학교 대학원 박사과정
4 경남대학교 산업경영대학원 기계공학과 석사과정
1*M.S. Course, Graduate School Kyungnam University.
2 Dept. of Mechanical Engineering, Kyungnam University.
3 Phd. Course, Graduate School Kyungnam University.
4 M.S. Course, Manigerment .& Industry Graduate School Kyungnam University.
1. 서 론
일반적으로 로봇의 모션제어방법에서 로봇 매니 퓰레이터의 동력 파라미터 및 동력특성을 정확히 알 수 있는 경우에는 선형시 불변PID제어방식 혹 은 사용하여 정밀한 작업경로 제어가 가능하다.
그러나 현실적으로 운동방정식을 정확히 얻기 어 렵고 또한 부하가 번번이 변화함에 따라 로봇의 동력 파라미터 값이 작업환경에 따라 변화하게 된 다. 이를 보상하기 위해 본 연구에서 퍼지제어 기 법을 이용한 계산 토크 제어기를 구성하는 로봇 제어기를 제안한다. 최근 비례-미분 타입 퍼지 계 산토크 제어기에 관한 연구가 있었으나 비례-미분 제어기는 외란 존재 시 시스템의 정상상태 오차를 제어하기 어렵다. 이에 적분 기능을 가진 제어기 를 구성함으로써 간접적으로 보상 할 수 있다. 비 례 제어요소는 오차에 비례하여 동작하며, 적분 요소가 없는 플랜트에 비례 보상기만을 사용한다 면 일정한 입력에 대하여 정상 상태 오차가 발생 하게 된다. 이러한 정상 상태 오차는 보상기에 적 분제어 요소를 포함시킴으로써 제거 할 수 있다.
즉 외란 제어 효과를 가진 비례-적분-미분제어기 의 장점을 이용하여 시스템의 정상상태 오차를 제 거 할 수 있다. 일정한 외란에 대해서도 정상상태 오차가 발생 할 수 있으며, 적분 제어요소는 이 때 발생하는 정상상태 오차가 발생 할 수 있으며, 적분 제어요소는 이 때 발생하는 정상 상태의 오 차 신호가 작아지도록 제어 할 수 있는 장점을 갖 고 있다.[1,2]
본 논문에서는 고온 단조공정에서의 작업경로 제어를 위해서 계산 토크 제어기의 기본구조에서 제어의 견실성 증가를 설계전략의 목적으로 퍼지 제어 알고리즘을 융합시켜 작업경로 제어의 정밀 성을 향상시키고자 한다. 외란 입력 시 강인성을 가지고 비선형성을 다루는 능력이 있는 비례-적분
-미분 타입 퍼지 제어기를 이용한 계산 토크 제어 기를 제안하여 로봇 매니퓰레이터의 정확하지 못 한 모델링과 변수의 변화에 민감한 문제점을 보상 하여 추적오차를 감쇄시키고 외란에 의한 시스템 의 성능감소를 최소화시켰다. 퍼지 제어기를 구서 함에 있어 비례, 미분, 적분 오차를 이용한 3차원 규칙기반을 가진 퍼지제어기는 제어규칙을 얻기가 어렵고 또한 제어규칙의 수도 많으므로 비례-미분 과 비례-적분타입 퍼지 제어기를 병렬로 연결한 제어기를 구성하였다.[3,4]
제안된 제어기의 장점으로는 첫째, 선형 비례- 적분-미분제어기를 기초로 퍼지 제어기를 설계하 므로 구조를 이해하기 쉽고, 가속도 오차를 사용 하지 않는다. 둘째, 퍼지 제어기의 제어 출력이 비선형 함수의 비퍼지화로 결정되므로 선형 및 비 선형 플랜트에 우수한 적용능력을 가진다. 셋째, 고속추론이 가능하며, 입력변수의 증가에 따른 퍼 지규칙의 수가 증가하여도 쉽게 적용 가능하다.
2. 작업경로 궤적제어 방법
2.1 제어 기본 구조
본 연구에서는 기본제어방식은 계산토크제어 방 식을 기본구조로 한다. 계산토크제어 방식은 로봇 매니퓰레이터라는 특수한 형태의 시스템을 대상으 로 설계되므로 제어기 설계가 비교적 단순한 특징 이 있는 그 구성은 내부 비선형 보상부와 외부 궤 환 제어부로 나눌 수 있다. 내부 비선형 보상부는 중력, 마찰력, 관성 행렬과 같은 로봇 매니퓰레이 터의 비선형항에 궤환을 통해 상쇄시켜 선형모델 로 근사시키는 역할을 한다.[5]
(2.1)
(2.2)
계산 토크 방식은 식(2.1)의 비선형 로봇모델을 등가 선형시스템으로 변형시키기 위해 비선형항을 로봇 매니퓰레이터 제어기내에 포함시켜 선형제어 이론을 원하는 폐루프 응답을 얻는데 사용 가능하 도록 접근하였다. Fig. 1의 계산 토크 방식을 수 식적으로 유도해 보면 다음과 같다. 로봇 매니퓰 레이터의 기준 궤적(desired trajectory)을
라고 하면 추적 궤적 오차는 다음과 같이 정의된 다.[6]
(2.3)
궤적 오차에 대한 입력 의 영향을 나타내 기 위해서는 오차의 1,2차 미분을 구하면
(2.4)
(2.5)
식(2.1)의 를 식(2.4), (2.5)에 대입하면 다음과 같이 구할 수 있다.
(2.6)이때 제어입력함수 와 외란(disturbance) 함수
를 다음과 같이 둘 수 있다.
(2.7)
(2.8)위의 식들로부터 궤적 오차 동역학식을 구하면 다음과 같다.[7,8]
(2.9)식(2.7)의 feedback 선형화 변환은 다음과 같이 구할 수 있다.
(2.10)식(2.10)을 계산 토크 제어라고 한다.
보조 제어 신호 를 정하기 위한 여러 가지 방법이 있다. 한가지 방법은 외부 궤환 제어부로 비례-미분 제어기를 사용하는 것이다. 비례-미분 계산 토크 제어기는 모든 로봇 파라메타가 알려져 있고 외란이 존재하지 않을 경우 효율적이다. 그 러나 고전 제어 이론으로부터 외부 외란의 존재 시에 비례-미분 제어기는 정상상태 오차를 발생함 을 알고 있다. 결과적으로 피드포워드 루프에 적 분기능을 포함하는 비례-적분-미분 계산 토크 제 어기를 사용함으로써 이를 제거 할 수 있다.[9,10]
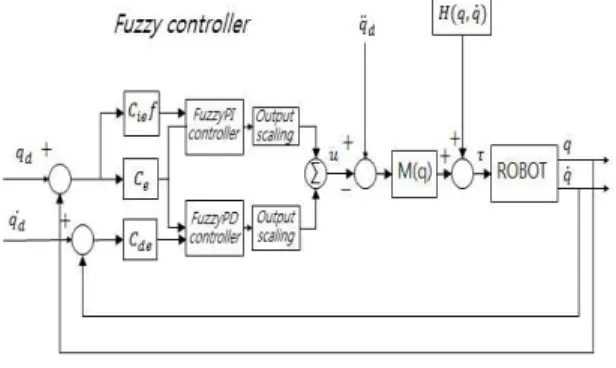
Fig. 1. Basic schime of PID computed torque control.
Fig. 1은 비례-적분-미분 궤환을 가진 계산 토 크 제어기의 불럭선도를 나타내고 있다. 이 때 적 분 오차 과 제어입력 를 다음과 같이 정의한 다.[10,11]
(2.11)
(2.12)여기서
는 대각으로 양의 이득들로 구성된 × 상수 대각 이득행렬이며 이는 ES 알 고리즘을 이용해 최적화된 값을 찾는다. 식(2.12) 과 같은 제어입력이 정의되면 로봇 매니퓰레이터 는 다음과 같은 토크로 구동된다.[12,13]
(2.13)
이 제어 법칙은 식(2.9)에서 적분기능을 가진 오차 동역학식으로 수정될 수 있다.[13,14]
(2.14)
(2.15)
오차 동역학식의 폐루프 특성방정식은 다음과 같이 나타낼 수 있다.
∆
(2.16)위의 특성 방정식에서 Routh 관별법에 의해 적 당한
를 적절히 선택하면 폐루프 안정 도를 보일 수 있을 것이다. 즉 제어 오차가 0으로 수렴함을 알 수가 있다. 본 논문에서 비례-적분- 미분 계산 토크 제어기에 대한 최적값은 ES 알고 리즘에 의해 구해진다.[15,16]2.2 퍼지이론에 의한 계산토크제어기 설계
일반적으로 소속함수는 삼각형(triangle), 평행사 변형(trapezoidal), 가우시안(Gaussian), 종(bell) 모양으로 결정한다.[17,18]
소속 정도(membership grade) : 전체집합에서 퍼지 부분 집합의 원소가 그 집합에 속하는 정도 로서 단위구간 [0,1] 사이의 실수값으로 나타낸다.
2.2.1 퍼지 관계
퍼지 집합에서 확실히 이해해야 하는 문제는 집합과 집합간의 관계 즉 사건과 사건의 관계를 정의해 주는 퍼지 관계이다. 제어의 경우는 입력 과 입력, 출력과 출력 또는 입력과 출력 관계 등 이 어느 정도 상관관계가 있는지 정의 할 수 있는 것으로 불 수 있다.[19,20,21]
앞서 설명한 일반적인 크리스프 관계는 이들의 관계가 정확히 구분되는 것이 특징이다. 그러나 사람들의 관계가 어느 정도 ‘관계가 있다.’, ‘관계 가 전혀 없다.’ 등과 같은 애매한 관계는 나타낼 수 없다. 이에 비해 퍼지 관계는 이들 관계의 정 도를 0에서 1의 숫자를 이용해 수치로 나타낼 수 있다. 이것이 퍼지 관계이다. 따라서 퍼지 관계는
×
의 직접 집합 위에 퍼지 집합을 형성하는 것이 되므로 이 때의 소속함수를 식(2.17)과 같이 나타낼 수 있다.[21,23]
×
→ (2.17)즉 집합 X아 Y의 요소 x, y에 대한 소속 함수
은 1에 가까울수록 관계가 강하고 0에 가까울 수록 관계는 소원함을 나타낸다. 따라서 두 집합 의 퍼지 관계 R은 수학적으로 다음과 같이 표현 한다.[23,24]
× ∈
∈
(2.18)2.2.2 퍼지 추론
퍼지 추론(fuzzy inference)이라는 것은 어떤 주어진 사실이나 관계로부터 새로운 관계나 사실 을 유추해 나가는 일련의 과정이라고 정의를 하며 즉 “IF x is A THEN y is B”(A, B는 퍼지 집합 이다)가 되는 함의와 퍼지 제어 규칙에 있어서 “x is A”라는 입력과 그 입력에 대해서 “y를 어떻게 구할 수 있을까?” 하는 것을 다루는 과정을 의미 한다. 여기서 규칙이라는 말은 어떤 사실들의 관 계를 나타내며, 사실이라는 말은 현재의 어떠한 상태를 나타내는 말이다. 그리고 추론은 여러 가 지의 “규칙”들과 “사실”들로 구성되어져 있으며 또한 규칙들과 사실들은 지식 기반(Knowledge base)에서 “IF-THEN” 형식의 언어적인 규칙으로 구성되어져 있다. 그 일반 형태는 다음과 같 다.[25,26]
규칙 : IF x is A THEN y is B 사실 : x is A
여기서 x, y는 언어적인 변수(linguistic variable)이고, A, B는 언어적인 값(linguistic value)이다. “x is A”는 전건부(antecedent)이고
“y is B”는 후건부(consequent)이다. 규칙과 퍼지 함의가 있고 관측된 사실
가 있을 때에는 추 론 방법에 따라서 간략하게 다음과 같은 추론된 결론
를 얻을 수 있다.[27,28]규칙 : IF x is A THEN y is B 사실 : x is
추론 결과 : y is
추론 과정 :
∘
여기서 ∘ 는 앞의 퍼지 관계의 합성에서 논의 된 바 있는 퍼지 추론의 합성 규칙(composition rule of inference)이며,
는 추론될 결과이다.위의 추론에서는 여러 가지 방법이 있으나 크 게 전향 추론과 후향 추론으로 나누어지며, 또한 직접법과 간접법으로 구분하기도 한다. 추론법에 있어서는 전제되어야 할 것이 있는데 그것은 추론 에 근거할 규칙이 필요하다는 것이다. 이 규칙은
“IF-THEN”의 형식으로 표현된 전건부와 후건부 로 이루어진 퍼지 명제들로 결합되어 있다.[29,30]
다음은 주로 사용되는 추론의 합성 규칙인 Mamdani에 의한 MAX-MIN 규칙과 Yamazaki에 의한 MAX-PRODUCT규칙을 표현하였다.
(1) MAX-MIN 합성
∙
∈
∘
∈
∧ (2.19)
(2) MAX-PRODUCT
∙
∈
∘ (2.20)
2.2.3 비퍼지화
추론으로부터 얻어진 최종값은
는 입력에 대한 알맞은 결과값이 아니다. 따라서 퍼지 시스 템이 쓰이는 플랜트에 적용되어질 때에는 그 때의 알맞은 수치 로 바꾸어 주어야만 한다. 이 과정 을 비퍼지화(defuzzifier)라고 한다. 즉 추론의 과 정을 통한 애매한 값이 아닌 정량적인 수치로 바꾸어 주는 과정을 일컫는 것이다. 이 비퍼지화 방 법에는 크게 3가지 방법이 있다.[30]
(1) 최대 평균법(average of maxima) : 최대 멤버쉽의 값을 갖는 원소의 값의 평균을 취하는 방법이다.
(2.21)
(2) 최대·최소 평균법(mean of maxima and minima) : 위의 최대 평균법이 다소 변경된 것으 로 멤버쉽 값을 갖는 원소의 와 최소 멤버쉽 값을 갖는 원소 와의 사이에서 평균을 취하는 방법이다.[31]
≤ ≤ (2.22)
(3) 무게 중심법(center of gravity) : 멤버쉽 값의 모든 요소들의 값을 모두 취하는 방법이다.
∙
(2.23)
위의 비퍼지화 방법들 가운데 무게 중심법이 가장 유연한 결과값을 가지는 것으로 알려져 있 다. 퍼지 규칙은 9개이고 멤버쉽 함수는 가우시안 (Gaussian)형을 사용하였다.
2.2.4 퍼지 토크 제어기 설계
퍼지 제어기는 시스템 모델이 고전 제어 이론 으로 해석하기에 너무 복잡한 제어분야에 적용되
어 좋은 효과를 얻고 있다. 본 장에서는 비례, 미 분, 적분 오차를 이용해 비례-미분과 비례-적분 퍼지 제어기를 병렬로 연결하여 시스템 성능의 저 하 없이 퍼지 규칙의 수를 줄이고 간편화한 비례- 적분-미분 퍼지 계산 토크 제어기를 구성한다. 퍼 지 계산 토크 제어기의 구조는 다음 그림과 같다.
Fig. 2. The scheme of fuzzy computed torque controller
제안된 퍼지 계산 토크 제어기에 적용된 제어 입력 는 비례-적분타입 퍼지 제어기와 비례-미 분타입 퍼지 제어기와의 합이므로 다음 식과 같이 나타낼 수 있다.
(2.24-a)
(2.24-b)
여기서 는 퍼지 제어기의 입력변수,
∙
∙는 비례-적분타입, 비례-미분 타입 퍼지 제어,
는 퍼지 제어기의 입력 가중치이다.ES에 의해 최적화된 모든 입출력 변수에 대한 소속함수는 삼각형 멤버쉽 함수를 사용하였으며 각 제어변수의 전체영역은 –1에서 1로 정규화 시
켰다.
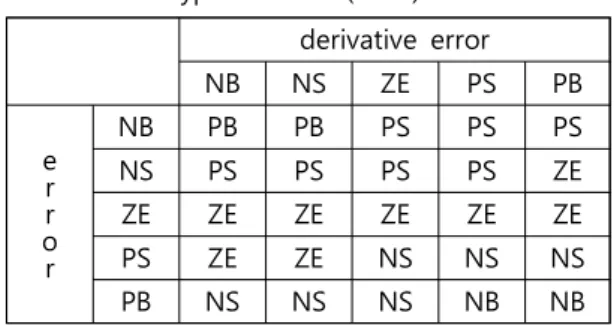
퍼지 제어기에 의해 로봇 매니퓰레이터의 1, 2 축에 대한 제어 입력값을 구하게 된다. 퍼지 입력 값 비례, 미분, 적분 오차로부터 퍼지 출력을 추 론하기 위한 퍼지 제어 규칙은 다음 표와 같이 설 정하였다.
다음 표에서 NB(Negative Big), NS(Negative Small), ZE(Zero), PS(Positive Small), PB(Positive Big)이다.
Table 1. PI type fuzz rules(Link1) integral error
NB NS ZE PS PB
e r r o r
NB PB PB PB PB PS
NS PS PS PS PS PS
ZE ZE ZE ZE ZE ZE
PS NS NS NS ZE ZE
PB NB NB NB NB NB
Table 2. PI type fuzz rules(Link2) integral error
NB NS ZE PS PB
e r r o r
NB PB PB PB PB PS
NS PS PS PS ZE ZE
ZE ZE ZE ZE ZE ZE
PS ZE NS ZE ZE NS
PB NS NS NS NB NB
Table 3. PD type fuzz rules(Link1) derivative error
NB NS ZE PS PB
e r r o r
NB PB PB PB PB PE
NS NS NS PS NS PB
ZE ZE ZE ZE ZE ZE
PS NS NS NS NS NS
PB NB NB NS NS NB
Table 4. PD type fuzz rules(Link2) derivative error
NB NS ZE PS PB
e r r o r
NB PB PB PS PS PS
NS PS PS PS PS ZE
ZE ZE ZE ZE ZE ZE
PS ZE ZE NS NS NS
PB NS NS NS NB NB
위의 퍼지 제어규칙 표에서 보이는 것과 같이 3차원의 비례오차, 적분오차, 미분오차를 사용하고 이를 2차원의 병렬 비례오차, 적분오차 그리고 비 례오차, 적분오차를 적용함으로써 50의 제어규칙 을 설정하였다.
퍼지 제어기의 추론 과정은 Mamdani의 MAX-MIN 방법을 사용하였다. 그 추론 결과로부 터 퍼지 제어기의 출력값을 계산하기 위한 비퍼지 화 방법은 비교적 유연한 결과값을 가지고 계산과 정이 단순한 무게 중심법을 채택하였다.
∙
∙
(2.25)
∙
∙
(2.26)
여기서
는 추력 가중치, 는 번 째 출력 소속함수의 등급이다. 퍼지계산토크 제어 기에서의 입력층, 중간층, 출력층의 뉴런수는 각각 2, 7, 1구조로 설계한다.3. 수직다관절 로봇의 모델분석
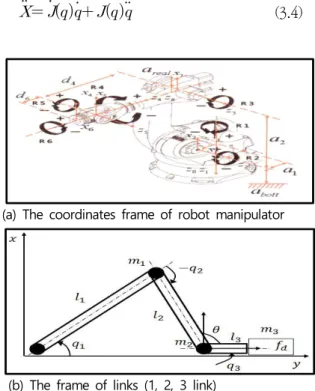
Fig. 3은 작업경로제어 실험에 사용될 6자유도 로봇의 아암의 링크 1,2,3의 좌표계를 나타내고 있다. 위의 로봇 아암의 좌표계에서 질량 , 마찰계수 , 탄성계수 를 갖는 물체에 원하 는 힘
를 가한다. 힘의 방향은 Fig. 3과 같이 y 축과 링크 3이 평행한 방향에서 물체에 힘이 가 해지도록 한다. 로봇 매니퓰레이터의 파라미터는 다음과 같다.[12]
: 관절
의 각
: 링크
의 질량
: 링크
의 길이각 링크상의 직교 좌표에서 끝점 위치는 다음 과 같이 나타낼 수 있다.
(3.1-a)
(3.1-b)
(3.1-c)
(3.1-d)
(3.1-e)
(3.1-f)여기서,
는 로봇공학에서 자주 사용되는 표 기법으로cos
의 축약형이다. 일반적 으로 주어진 관절변수∈
에서 ∈
으로의 비선형 변환은 다음과 같다. 여기서,
는로봇공학에서 자주 사용되는 표기법으로
cos
의 축약형이다. 일반적으로 주어 진 관절변수∈
에서 ∈
으로의 비선형 변환은 다음과 같다.
(3.2)여기서,
는 연속 비선형 백터이고 식(4.2) 을 시간에 대하여 미분하면 다음과 같다.
(3.3)여기서,
는 매니퓰레이터 끝점에서의 선형속 도를 나타내며,
는 자코비안(Jacobian)을 나 타낸다. 식(4.3)을 시간에 대하여 한번 더 미분하 면 다음과 같은 가속도를 얻을 수 있다.
(3.4)(a) The coordinates frame of robot manipulator
(b) The frame of links (1, 2, 3 link)
Fig. 3. Coordinate frame of vertical type robot manipulator with six axes
본 논문에서 사용된 로봇 매니퓰레이터는 링크 의 유연성 및 마찰력은 무시하며, 관성의 질량은 부하와 함께 집중 질량으로 링크의 끝에 위치한다.
매니퓰레이터의 Lagrange 공식에 의한 동역학 방정식은 다음과 같다.
(3.5)
여기서, 은 Lagrange 함수를 나타내며,
는
번째 관절의 각, 는 관절
에 가해지는 토크 이며, Lagrange 공식은 다음과 같다.[13,16]
(3.6)여기서, 와 는 각각 링크의 전체 운동에너 지 합과 위치에너지의 합을 나타내며 다음과 같 다.
(3.7-a)
(3.7-b)각 관절의 운동에너지와 위치에너지는 다음과 같다.
(3.8-a)
(3.8-b)
(3.8-c)
(3.8-d)
(3.8-e)
(3.8-f)식(4.8-a) ~ 식(4.8-f)에 의하여 동역학 방정식 은 다음과 같다.
(3.9)여기서,
는 환경에 원하는 힘을 포함하지 않았 을 때의
로 표현되는 ×
행렬의 관 절 토크이며,
는 ×
비정칙 관성 행렬,
는 ×
원심력과 Coriolis 벡터,
는 ×
중력 벡터,
는
이다.또한
행렬의 각 원소
는 다음과 같다.
행렬의 각 원소
…
는 다음과 같다.
,
,
,
,
,
행렬의 각 원소
는 다음과 같다.
4. 성능실험
4.1 작업경로 위치궤적 추적 성능시험
본 논문에서는 비례-미분 제어기와의 최종오차와 절대오차 합의 결과 비교를 통하여 퍼지계산토크 제어기의 우수성을 살펴본다. 수직다관절 로봇 매니 퓰레이터에서 사용한 파라미터는 Table 5과 같다.
Table 5. Parameter of the robot manipulator 길이 [m] 질량 [kg]
링크 1
링크 2
링크 3
고온 환경의 단조공정에 적응할 수직다관절 로 봇 매니퓰레이터 모델은 다음과 같다.
(4.1)여기서, 질량계수, 마찰계수, 탄성계수는 각각
이다.퍼지계산토크 제어기에서의 입력층, 중간층, 출 력층의 뉴런수는 각각 2, 7, 1이고, 학습율은
이다. 또한 후건부의 가중치는 –0.5 ~ 0.5 사이의 값으로 초기화하고, 학습반복횟수는
회로 하였다.Table 6. Position errors of end point using FCT and PD
제어방법 오차
퍼지계산 토크제어기
비례-미분 제어기(PD)
최종오차 (m) 0.007 0.014
절대오차의 합
(
) 0.251 0.855Table 7. Position errors of joint using FCT and PD
퍼지계산토크 제어기 (deg)
비례-미분 제어기 (deg) 최종
오차
절대 오차 합
최종 오차
절대 오차 합 관절 1 0.067 14.12 0.291 18.31 관절 2 0.088 42.451 0.102 46.981 관절 3 -0.146 32.071 -0.451 35.281
Fig. 4와 5는 각각 관절 1에 대한 퍼지계산토 크와 비례-미분 제어기의 실제 응답 값을 나타낸 다. 또한 Fig. 5은 두 제어기의 오차를 나타낸다.
Table 7을 통해 알 수 있듯이 최종시간
초에서 퍼지계산토크 제어기의 오차는 0.06deg이 고 비례-미분 제어기의 오차는 0.35deg였으며,
초에서
초까지의 절대오차 합에서 퍼지계산토크 제어기가 14.12deg, 비례-미분 제어 기는 18.31deg로 계산되었다. 최종오차와 절대오 차 합의 결과로부터 비례-미분 제어기보다 퍼지계 산토크 제어기의 오차가 더 작음을 알 수 있고, 그러므로 관절 1의 위치 제어에 대한 퍼지계산토 크 제어기의 응답 특성이 비례-미분 제어기 보다 더 우수한 것을 알 수 있다.Fig. 4. Position of joint 1 using FCT
Fig. 5. Position errors of joint 1 using FCT and PD3
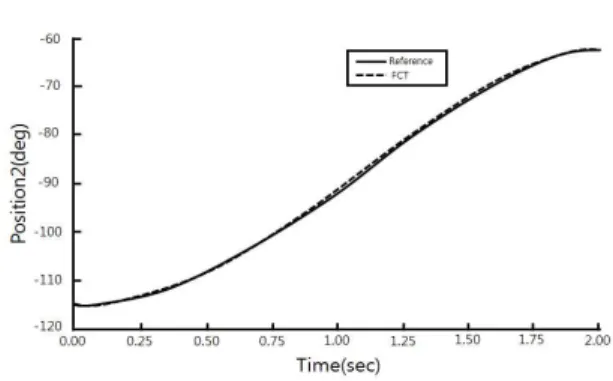
Fig. 6. Position of joint 2 using FCT
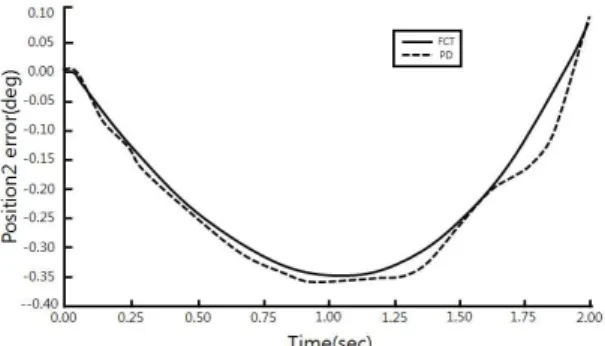
Fig. 7. Position errors of joint 2 using FCT and PD
Fig. 8. Position of joint 3 using FCT
Fig. 9. Position errors of joint 3 using FCT and PD
4.2 일정한 엔드 이펙터 방향에서의 작업공 간상의 작업경로 궤적 추적 성능시험
6축 수직다관절 로봇의 작업경로 궤적 추적 성 능 실험을 위하여 엔드 이펙터의 요구된 궤적을 다음 식으로 주어진 궤적을 따라 궤적 추적 실험 을 한다.
x축 :
sin
y축 :
z 축 :
아래와 같이 일정한 방향 행렬이 만족해야 한다.
각 조인트의 초기 각도는 아래와 같다.
궤적 에러가 조인트 제어 성능에 의해 –1mm에 서 5mm로 되었음을 보여준다. 그리고 회전 행렬 이 9개의 성분들은 아주 작은 스케일 안에서 대 부분 서로 다르다. Table 8에 나타난 파라미터를 사용한 제안된 제어구조를 이용함으로서 요구된 궤적이 7자유도 로봇에 의해 따라가는 것을 볼 수 있다.
Fig. 10. Trajectory of the robot end effect
Table 8. Control parameter of 7-DOF manipulator
Lin k 1
Lin k 2
Lin k 3
Lin k 4
Lin k 5
Lin k 6
Lin k 7
Lin k 8
0.25 9.5 5.5 6.3 5.3 0.82 5.4 0.92
0.02 3.2 3,1 3.3 2.2 0.3 2.5 0.55
0.2 1.2 0.42 0.43 0.13 0.12 0.16 0.25
Lear ning rate
4.3 임의의 작업경로 추적 성능실험
이 시뮬레이션의 경우는 원래의 위치에서 도착 지로 임의의 궤적으로 움직이는 로봇의 유연한 특 성을 보여준다. 엔드 이펙터의 초기 상태는 아래 와 같이 나타낼 수 있다.엔드 이펙터의 위치 :
엔드 이펙터의 방향 :
조인트 각도 값 :
도착지의 상태는 아래와 같다.
도착지의 위치 :
도착지의 방향 :
궤적은 로봇이 다니는 궤적에 임의로 위치하는 이산 지점사이에 보간법이 사용되었다.
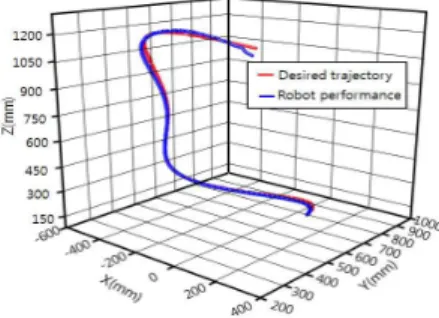
로봇의 성능은 Fig. 11에 나타나있다. 시뮬레이 션 결과를 보면 로봇의 궤적에서 제안된 제어기의 유효성을 확인할 수 있다. 또한 리던던트 역기구 학이 실시간 계산과정에서 효과적임을 보여준다.
Fig. 11. Trajectory of the robot end effect
X Y Z
13.87313 -841.3463 760.1298
RX RY RZ
-176.5320 0.1298843 -179.5201
RLAB FNSD Fig
Lefty/Above NonFlip/Sng FIG 5 Fig. 12. The experimental scene of working path
and control for vertical type robot manipulator
5. 결 론
본 연구에서는 고온 환경 단조공정에서 단조품 이동 및 핸들링 작업을 위해 수직다관절 로봇 매 니퓰레이터의 경로 및 궤적 제어의 실시간 실현을 구하기 위하여 제조공정에서의 환경정보 및 파라 미터 등의 불확실성과 다양한 노이즈로 인하여 극 복하지 못하는 제어 성능의 한계점을 극복하기 위 하여 퍼지 제어 기법을 적용한 계산 토크 제어기 방법을 제안하고 신뢰성을 분석하였다.
본 논문에서는 알고리즘의 효율성이 잘 입증된 계산 토크 제어기의 구조를 유지하고 시스템의 강 인성 증가를 설계전략의 목적으로 하여 외란 입력 시 강인성을 가지고 비선형성을 다루는 능력이 있 는 비례-적분-미분 타입 퍼지 제어기를 이용한 계 산 토크 제어기를 제안하여 로봇 매니퓰레이터의 정확하지 못한 모델링과 변수의 변화에 민감한 문 제점을 보상하여 추적오차를 감쇄시키고 외란에 의한 시스템의 성능감소를 최소화시켰다. 퍼지 제 어기를 구서함에 있어 비례, 미분, 적분 오차를 이용한 3차원 규칙기반을 가진 퍼지제어기는 제어 규칙을 얻기가 어렵고 또한 제어규칙의 수도 많으 므로 비례-미분 타입과 비례-적분 타입 퍼지 제어 기를 병렬로 연결한 제어기를 구성하였다.
생성된 출력을 가지고 제안된 제어기의 효율성 을 입증하기 위해서 로봇 매니퓰레이터가 불확실 성과 외란이 존재하는 경우와 존재하지 않는 경우 에 대해 실험하였다. 그리고 속도가 2배 빠른 경 우의 경우에도 실험을 하였다. 실제 실험을 통하 여 단순히 계산 토크 제어기만을 사용했을 경우와 제안된 제어기의 비교를 통해서 제안된 제어기가 우수한 성능을 가짐을 확인하였다. 그리고 명령입 력이 변화된 다른 환경에서도 고정이득 계산 토크 제어기보다 제안된 방법이 더욱더 우수한 성능을 나타냄을 확인하였다.
후 기
본 연구는 로봇비즈니스벨트사업의 일환으로 연 구되었음.
참고문헌
[1] D. B. Westmore and W. J. Wilson, "Direct Dynamic Control of a Robot Using and End-Point Mounted Camera and Kalman Filter Position Estimation", Proc. IEEE Int. Conf.
Robotics and Automation, pp. 2376-2384, (1991).
[2] 류창렬, 채창현, 김상희, 임재춘, “간편 간접추 론 퍼지 PID 제어기를 이용한 × 상호 결 합 공정제어,” 제 14회 자동제어학술회의 논문 집, (1999).
[3] F. L. Lewis, C. T. Abdallah, and D. M.
Dawson, Control of Robot Manipulators, Macmillan Publishing Company, (1993).
[4] T.C. Hasi, "Adaptive Control Scheme for Robot Manipulators-A Review," In Proceeding of the 1987 IEEE Conference on Robotics and Automation, San Fransisco, CA, (1986).
[5] D. Koditschek, "Quadratic Lyapunov Functions for Mecanical Systems," Technical Report No.
8703, Yale University, New Haven, CT, (1983).
[6] J. J. Craig, "Adaptive Control of Meduanical Manipulator," Addison-wesley, (1988).
[7] S. K. Tso, Y. Xu and H. Y. Shum, “Variable structure model reference adaptive control of robot manipulators,” Proceeding of the 1991 IEEE International Conference on Robotics and Automation, Sacramento, California, April (1991).
[8] Louis-A. Dessaint, Maarrouf Saad, Bernard Hebert and Kamal Al-Haddad, “An adaptive controller for a direct-drive SCARA robot,”
IEEE Trans, on Industiral Electronics, Vol. 39, no. 2, pp. 105-111, April (1992).
[9] H. Berghuis, R.Orbega, and H.Nijmeijer, "A Robust Adaptive Robot controller," IEEE Trans., Robotics and Automation, Vol. 9, No. 6, pp.
825-830, (1993).
[10] A. Koivo and T. H. Guo, "Adaptive Linear Controller for Robot Manipulators." IEEE Transactions and Automatic Control, Vol.
AC-28, pp. 162-171, (1983).
[11] R. Ortega and M.W. Spong, "Adaptive Motion Control of Rigid Robots: A Tutorial,"
Automatica, Vol. 25, pp. 877-888, (1989).
[12] P. Tomei, "Adaptive PD Controller for Robot Manipulators," IEEE Trans. Robotics and Automation, Vol.7, No.4, Aug., (1991).
[13] J. J. Craig, Adaptive Control of Mechanical Manipulators, Addison-Wesley, (1988).
[14] J. E. Slotine ad W. Li, “Adaptive Manipulator control : A case study,” IEEE Trans. Automat.
Contr., Vol. AC-33, no. 11, pp. 995-1003, Nov., (1988).
[15] J. E. Slotine ad W. Li, “Adaptive Nonlinear Control, Prentice-Hall, (1991).
[16] J. Craig, “Introduction to Robotics,”
Addison-Wesley, (1989).
[17] 김유경, 전기준, “한축 로봇 매니퓰레이터의 퍼지로 보상한 토크 계산 제어,” 제 14회 자 동제어학술회의 논문집., (1999).
[18] M. A. Liama, R. Kelly and V. Santivanez,
“Stable computed torque control of robot manipulators via fuzzy self-tuning,” IEEE Trans. on System and Cybernectics, Vol. 30, no. 1, Feb., (2000).
[19] J. A. Tenreiro Machado, J. L. Martins de Carvalho and Alexandra M. S. F. Galhano,
“Analysis of robot dynamics and compensation using classical and computed torque techniques,” IEEE Trans. on Education, Vol.
36, no. 4, Nov., (1993).
[20] S. Nicosia and P. Tomee, "Model Reference Adaptive Control Algorithm for Imdustrial Robots," Automatica, Vol. 20, No. 5, pp.
635-644, (1984).
[21] N. Sadegh and R. Horowitz, "An Exponentially Stable Adaptive Control Law for Robot
Manipulators," IEEE Trans. Robotics and Automation, Vol. 9, No. 4, Aug., (1990).
[22] F. T, Cheng, J. S. Chen, “ Study and resolution of singularities for a 7 DOF redundant manipulator” IEEE Transactions on Industrial Electronics, 45 (3), pp. 469-480, (1988).
[23] Zbigniew Michanlewicz, Genetic Algorithm + Data Structures=Evolution Programs, Springer - Verlag, (1992).
[24] Davie E. Goldberg, Genetic Algorithm in search, Optimization, and Machine, Learning, Addison-Wesley, (1989).
[25] K. C. Suh and J. M. Hollerbach, “Local versus global torque optimization of redundant manipulators”, in Proc, IEEE Int. Conf. Robot.
Autom., pp.619-624., (1987).
[26] 정양근, 심현석, 이우송, 한성현, “영상 피드 백에 의한 4축 스카라 로봇의 실시간 궤적추 적제어에 관한 연구”, 한국산업융합학회 논 문집 제17권 3호, pp. 136-144, (2014).
[27] 이세한, “운동용 힘 발생기를 위한 리니어 모 터의 전류제어”, 한국산업융합학회 논문집 제18권 1호, pp. 1-9, (2015).
[28] 양준석, 구영목, 조상영, 원종범, 원종대, 한 성현, “내열환경 단조공정에서 핸들링작업을 위한 유연 아암 그리퍼 설계에 관한 연구”, 한국산업융합학회 논문집 제18권 4호, pp.
216-223, (2015).
[29] 조상영, 김민성, 구영목, 원종범, 강정석, 한 성현, “고온 환경 단조 공정자동화를 위한 6 축 수직다관절 로봇의 기구학 및 동특성 해 석에 관한 연구”, 한국산업융합학회 논문집 제19권 1호, pp. 10-17, (2016).
[30] 조상영, 김민성, 양준석, 원종범, 강정석, 한성 현, “수직다관절형 아암의 운동학적 모델링 및 관절공간 모션제어에 관한 연구”, 한국산업융 합학회 논문집 제19권 1호, pp. 18-30, (2016).
[31] 정양근, 김민성, 조상영, 원종범, 원종대, 한 성현, “고열 단조부품 핸들링을 위한 로봇 그 리퍼의 방위 및 포지션 정밀제어에 관한 연 구”, 한국산업융합학회 논문집 제19권 2호, pp. 88-94, (2016).
(접수:2017.01.12. 수정: 2017.02.24. 게재확정: 2017.03.08.)
![Table 5. Parameter of the robot manipulator 길이 [m] 질량 [kg] 링크 1 링크 2 링크 3 고온 환경의 단조공정에 적응할 수직다관절 로 봇 매니퓰레이터 모델은 다음과 같다](https://thumb-ap.123doks.com/thumbv2/123dokinfo/4860282.529255/10.874.462.772.570.659/parameter-manipulator-환경의-단조공정에-적응할-수직다관절-매니퓰레이터-모델은.webp)