논문 2014-51-9-28
착유로봇 매니퓰레이터와 구동제어장치 설계
( Design of Driving Control Unit and Milking Robot Manipulator )
신 규 재**
( Kyoo Jae Shin
ⓒ)
요 약
착유로봇 시스템은 움직이는 젖소의 유두 위치를 정확하게 검출해야 하고, 로봇 매니퓰레이터는 검출된 유두 위치값을 추적 하여 착유컵이 유두에 장착하도록 제어되어야 한다. 제안된 착유로봇 매니퓰레이터는 위치검출 레이저 센서를 이용하여 유두 를 스캐닝하고 임베디드 구동제어장치를 통하여 독립된 3축 브러쉬리스 서보 구동제어 메커니즘에 의하여 구현된다. 이 로봇 매니퓰레이터는 유두 위치검출용 레이저센서, 4개의 착유컵, 3축 x, y, z축의 매니퓰레이터, g축 방향 이송기능을 가진 유두인 식장치와 착유컵 구동장치, 임베디드 구동제어장치와 자동 밀크 제어라인으로 구성된다. 제안된 로봇시스템은 구동시스템 전체 가 전기구동방식으로 설계되어 있기 때문에 구조가 간단하고, 저가로 제작이 가능하며, 구동시에 소음이 적기 때문에 젖소의 심적 안정성을 줄 수 있는 장점을 가지고 있다. 설계된 로봇은 축산과학원 농장에서 젖소를 대상으로 실험을 실시하였으며, 실 험결과에 의하여 설계사양의 성능조건이 만족됨을 확인하였다.
Abstract
The milking robot system is very important to detect correctly the teats position in the moving condition of cow. Also, the robot manipulator must control tracking the teat cup to the detected teat position. The presented milking robot is designed using the one point laser sensor for teat position detection. The teats of cow are detected by the laser scanning unit and the manipulator has the function of 3 axes moving control unit. The presented teat detection method and the electrical driving manipulator have the advantages of a simple, low cost and very quiet. The designed manipulator is realized by the totally electrical motor and servo poison control algorithm with velocity PID compensation. The presented robot is realized using the teat detection unit, 4 teat cups, 3 axes robot arm, 6 servo motors and automatic milking control line. The designed robot is experimented in the cow farm and is satisfied with the designed performance specification for milking robot manipulator.
Keywords: Milking robot, Miking manupulator, Embedded control unit, Laser scanning, Moving target tracking
Ⅰ. 서 론
국내 축산업은 노령화에 따른 노동력 감소문제와 국 제적으로 WTO와 FTA에 의한 국내 시장개방으로 농가 의 경쟁력 강화가 필요하며, 낙농 축산업의 자동화를 통
* 정회원, 부산외국어대학교 디지털미디어학부
(Department of Digital Media Eng., Busan University of Foreign studies)
ⓒ Corresponding Author (E-mail: [email protected]) 접수일자: 2014년8월21일, 수정일자: 2014년9월01일 수정완료: 2014년9월10일
한 생산성 향상과 원가절감이 필요하다. 또한 국내 젖소 낙농사업은 1997년 IMF이후 영세 농가가 감소하였고, 사육규모가 확대되어 대규모 형태의 전업화가 됨으로써 착유자동화시스템의 도입 기반이 조성되고 있다.
착유로봇 시설은 1990년대 초에 개발되어 2010년 세 계 30여 개국에서 3,000여대가 사용 중에 있으며, 국내 농가에도 국외제품을 수입해서 약 90 농가에서 120대 정도 사용 중에 있는 도입 초기 단계이다. 축산 젖소농 가에서 우유를 생산하는 작업은 농가 소득을 결정하는 가장 중요한 작업이다. 착유작업은 매일 2∼3회 반복되
는 힘든 작업으로 젖소의 질병관리에도 중요하며, 농가 의 소득을 결정하는 작업이다. 젖소관리 작업으로는 착 유, 사료조리 및 먹이급여, 젖소관리 및 청소, 우유운반, 방목 및 청소 등이 있다. 특히 착유작업은 인력에 의존 하는 작업으로 젖소 관리시간 중에 51.9%의 노동력을 필요로 하기 때문에 착유관련 작업의 완전 자동화가 절 실히 필요한 실정이다[1~2]. 이러한 착유작업에 소요되는 노동력을 감소하기 위하여 네덜란드(Prolion, Gascoigne Melotte, Lely), 스웨덴(DeLaval, VMS), 일본(Orion), 프랑스(Cemagref), 영국(AFRC), 독일(Duveldrorf, Reonardo, FAL)에서 착유자동화 로봇을 개발하여 보급 하고 있다[3~4].
착유자동화 로봇을 도입 할 경우 노동비가 감소하고 생산성증가와 젖소관리의 편의성 때문에 수익 채산성이 있다고 판단되며 산유량 증가, 우유품질 향상효과와 젖 소 건강관리에 용이한 장점을 가진다. 또한 1일3회 착 유를 하면, 산유량이 경산우는 18%, 초산우는 25%가 증가하였다. Imag Dlo의 연구결과에서 보면, 착유횟수
제작사 기능
Lely
‧ 레이저 센서를 이용하여 유두위치를 감지하고 공압구동
‧ 유방과 유두건강을 위한 분방별로 착유완료 시 착유컵 착 탈기능
‧ 농장규모에 따라 모듈별 확장이 가능
‧ 초유와 항생제 함유 우유 분리기능
Delaval
‧ 매니퓰레이터 1개로 1개의 유두세척 유니트를 1개씩 클립 하여 공압구동제어에 의하여 유두에 장착
‧ 2개의 레이저 센서와 CCD카메라 영상이용 유방 및 각각 의 유두감지
‧ 매니퓰레이터는 유연한 동작구현, 소의 발길질에 의한 충 격 시, 자동정지 및 초기화 기능
‧ 유두세척은 유닛 수세식, 착유가 완료되면 진공압을 이용 자동 원상 복귀
Orion
‧ 발굽형태에 적외선 센서 매트릭스 배열과 초음파센서를 이용하여 유두인식
‧ 개체별 DB정보활용한 전기 및 공압구동제어
‧ 스폰지 브러쉬를 이용한 유두세척
‧ 유두청소, 전착유 분리, 착유 완료 후 스프레이 형태의 소 독
‧ 1대당 60두 착유관리 가능, 생산량 15~20 % 증가
Prolion
‧ 2개의 초음파센서 이용
‧ 유두세척 : 유두컵내부의 배관센서로 유두세척, 착유 자동 수행 및 착유상황감지
‧ 매니퓰레이터는 전기 모터를 이용한 수평이동, 공압 실린 더를 이용한 수평이동하는 혼용방식
‧ 착유중 각 유두에 전도도센서로 유질검사, 착유 상황 점검 및 1일 3~4회 착유로 생산성 향상
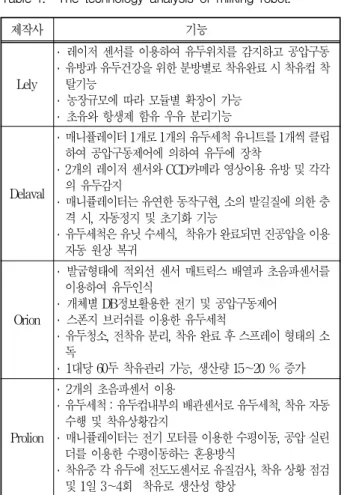
표 1. 착유로봇 기술분석
Table 1. The technology analysis of milking robot.
가 증가할 수 록, 우유에 포함된 체세포수가 감소하여, 우유 품질이 향상되었다. 또한 착유 시 체온 및 전도도 를 측정하므로 젖소의 유방염을 조기 발견할 수 있고, 다회 착유는 유방염 치료 효과가 있다[5].
Lely, Delaval, Orion, Prolion사의 기존 착유로봇 기 술을 유두인식 및 구동 제어기술을 중심으로 분석하면 표 1과 같으며, 국내농가 보급에는 고가이고 A/S 지원 등에 한계가 있는 문제점이 있다.
본 논문에서는 국내 농가의 국제 시장 경쟁력 강화, 농가의 착유작업의 해결, 젖소 복지를 고려한 착유 자 동화, 자동화장비 도입에 따른 농가의 경제적 문제 해 소를 위하여 착유로봇 국산화 탐색모델을 연구한다. 국 내 농가에 적합한 저가 보급형의 착유로봇을 설계를 목 표로 착유로봇의 매니퓰레이터와 임베디드 구동제어 시 스템을 설계한다.
Ⅱ. 착유로봇 설계
1. 착유로봇 설계사양[5]
착유로봇 매니퓰레이터를 설계하기 위하여 국내 보 급된 젖소 홀스테인(Holstein)종을 대상으로 하였다. 축 산과학원의 젖소 11두에 대한 착유우의 체위를 측정하 여 착유로봇의 스톨과 매니퓰레이터의 설계제원의 표준 화 작업을 실시하였다.
가. 착유우의 체위 측정
착유 로봇설계를 위하여 측정대상의 체위는 측정부 위와 바닥과 유방에서 유두의 시작되는 점과의 높이,
그림 1. 젖소의 측정크기 제원 Fig. 1. Measured size of cows.
앞 유두와 꼬리까지의 길이를 그림 1과 같이 측정하였 다. 착유우의 체위의 최소 및 최대범위는 스톨의 규격 및 착유로봇 매니퓰레이터를 최적 설계하는데 적용되 며, 주요 제원은 다음과 같다.
나. 착유우의 유두 측정
유두의 상대적 위치를 측정하기 위하여 적갈색의 베 타딘 용액을 젖소의 유두에 바르고 A3(420mm ×279 mm) 크기의 종이를 사용하여 유두의 위치를 찍어 조사 한다. 각 착유우별 출산 차이, 비유 경과 일수(분만 후 경과일수)를 바탕으로 아침과 저녁의 각 산유량을 측정 하였다. 4개의 유두가 이루는 평면적인 유두면적, 앞․
뒤 유두간격, 좌․우 앞뒤유두간격, 기준 유두에서 근접 한 유두사이가 이루는 각도인 유두내각을 측정한 결과 는 그림 2와 같다.
그림 2. 착유우의 유두위치 측정거리 Fig. 2. Measured teats distance of cows.
다. 설계사양
착유우의 체위와 유두 측정값에 의하여 착유로봇 매 니퓰레이터의 동적범위 x축은 앞뒤발간의 최대거리, y
항목 설계목표
매니퓰레이터 구동속도
x축[mm/sec] 150 이상 y축[deg/sec] 40 이상 z축[mm/sec] 40 이상 착유컵
구동속도 g축[mm/sec] 250 이상 착유컵 장착오차 [mm] ± 3.0 이내 유두위치 검출거리[mm] 100∼400
표 2. 착유로봇 매니퓰레이터 설계사양
Table 2. The design specification of milking robot manipu -lator.
축은 착유컵 구동장치가 착유우 배면에 직각으로 위치 할 수 있는 90°, z축은 착유우의 배면높이를 기준으로 설정한다. 또한, 착유컵 구동장치 구동축 g축과 구동거 리는 유두위치 거리를 기준으로 움직이는 젖소의 유두 에 착유컵을 정확하게 장착하는데 필요한 추적성과 속 응성을 고려하여 표 2와 같이 매니퓰레이터와 착유컵 구동장치의 구동속도와 착유컵 장착오차를 설정한다.
2. 착유로봇 매니퓰레이터 설계[6]
가. 매니퓰레이터 기구부 설계
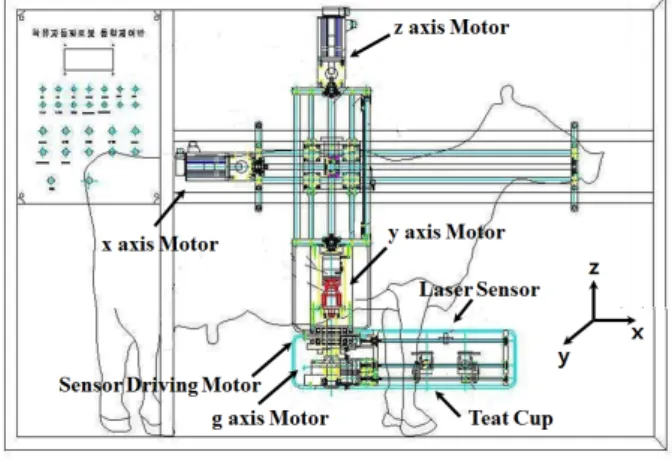
착유로봇 매니퓰레이터는 그림 3과 같이 레이저 센 서를 이용한 젖소 유두 인식장치와 4개의 착유컵을 장 착한 착유컵 구동장치를 탑재한다. 또한 각 독립된 x, y, z축 방향으로 이송되도록 구동모터와 센서로 설계 된다.
설계된 착유 매니퓰레이터는 착유 및 세척작업에 필 요한 유두인식장치, 착유컵 구동장치를 젖소의 유방으 로 이송할 수 있도록 구동력을 제공한다. 특히 착유 매 니퓰레이터는 x, y, z축 간이 상호 독립된 축이다. 또 한, x축 이송장치, y축 이송장치와 z축 이송장치는 3축 방향으로 구동력을 제공하도록 브러쉬리스 서보모터와 인버터로 구성된다.
그림 3에서 x축 이송장치는 x축 구동모터, 볼스크류, 리니어 부시, 서포트 유닛과 x축 위치검출 LVDT 센서 로 구성되어 x축 횡방향으로 매니퓰레이터의 이송방향 을 결정한다.
착유작업을 위하여 매니퓰레이터는 그림 3에서 그림
그림 3. 설계된 착유로봇 매니퓰레이터
Fig. 3. The designed manipulator of milking robot.
그림 4. 착유 매니퓰레이터 착유 평면도 Fig. 4. Milking plane schematic of manipulator.
4과 같이 y축 이송장치에 의하여 유두인식장치와 착유 컵 구동장치를 젖소 유방에 하부로 이송한다.
y축 이송장치는 착유컵을 착유스톨 준비단계인 초기 상태에서 젖소가 착유스톨에 입장한 경우에 유방으로 착유컵 구동장치를 진입시키기 위한 것이다. 이 y축 이 송장치는 y축 구동모터, 유성감속기어, 베어링, 동력전 달중심축, 동력전달 클러치와 y축 위치각 검출을 위한 회전형 포텐시오미터와 회전 벨트로 구성되어 착유 로 봇의 착유컵을 y축에 대한 이송방향을 결정한다.
z축 이송장치는 4개의 착유컵을 유두에 장착시키기 위하여 상하 방향으로 구동하기 위한 것이다. 이 이송 장치는 z축 구동모터, 볼스크류, 샤프트, 리니어 부시, 서포트 유닛, 지지대와 z축 위치검출 LVDT 센서로 구 성되어 착유컵을 z축의 상하방향에 대한 이송을 결정 한다.
나. 유두인식 및 착유컵구동장치 설계
착유로봇 매니퓰레이터는 초기위치에서 착유스톨 내 부로 젖소가 입장하게 되면 그림 4와 같이 매니퓰레이 터는 y축 방향으로 90° 회전한다. y축 이송장치가 유방 과 평행방향으로 정렬되면, 유두인식장치의 레이저센서 를 이용하여 g축 방향으로 이송하면서 젖소의 유두위치 를 감지한다. 다음으로 착유컵 구동장치에 의하여 착유 컵을 유두에 정렬시키고, z축 구동모터에 의하여 착유 컵을 유두에 장착하게 된다.
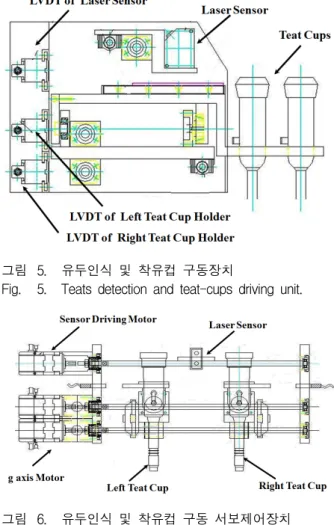
유두인식장치는 그림 5와 같이, 젖소의 4개 유두에 대한 위치각 및 거리를 검출하기 위하여 100∼400[mm]
의 위치검출이 가능한 레이저 센서, 센서 고정대와, 구 동력을 제공하는 볼스크류와 샤프트, 리니어 부시, 서포 트 유닛, 서보모터와 LVDT센서로 구성된다. 이 유두
그림 5. 유두인식 및 착유컵 구동장치
Fig. 5. Teats detection and teat-cups driving unit.
그림 6. 유두인식 및 착유컵 구동 서보제어장치 Fig. 6. Teats detection and teat-cups servo control unit.
그림 7. 설계된 착유컵 구동장치
Fig. 7. The designed teat-cup driving unit.
인식장치는 레이저 센서를 탑재한 상태로 g축 방향으로 이송하면서 유두위치각과 거리를 스캐닝을 수행함으로 써, 젖소 개체별로 유두배열과 위치를 검출할 수 있다.
유두인식장치는 그림 6과 같이 레이저센서와 센서 구동모터에 의하여 유두위치를 스캐닝하여 위치 지령값 이 결정된다. 착유컵 구동 서보제어장치는 좌측과 우측
착유대에 각기 2개의 착유컵이 장착되어 있어서 사람의 양손과 같이 유두에 착유컵을 장착하게 된다. 설계 제 작된 착유컵 구동장치는 그림 7과 같이 착유컵을 개별 이송하기 위하여 g축 구동모터와 좌우측 착유대로 구성 된다.
3. 임베디드 제어장치 설계
가. 브러쉬리스 서보모터의 수학적 모델링
착유 매니퓰레이터에 적용된 구동모터인 3상 BLDCM (Brushless DC Motor)의 등가모델 회로는 그 림8과 같다.상전압식은 식(1)과 같다. 여기서 는 고 정자 각 상에 유기되는 자속이고, 은 회전자 영구자 석에 의해 유기되는 고정자에 유기되는 쇄교자속이다.
브러쉬리스 서보전동기는 상과 상은 120° 3상을
역변환식을 이용하여 축변환으로 식(1)과 (2)와 같이 나타낼 수 있으며, 상전압과 상전류는 식(3)과 같다.
‧
(1)
‧
(2)
‧ ‧‧ ‧
(3)
또한 착유로봇 구동용 브러쉬리스 서보모터는 3상 영구자석형 동기전동기로써 역기전력이 정현파로 나타 나며 전류에 의해 전동기에 유기되는 토오크는 식(4)과 같으며, 기계적 전동기 토오크는 식 (5)와 같다[8~9].
그림 8. 3상 2극 브러쉬리스 서보모터의 등가회로 Fig. 8. Equivalent circuit of 3 phase 2 pole brushless
servo motor.
(4)
(5)
여기서, : 고정자저항
: 축 인덕턴스 : 회전자와 부하 관성모멘트
: 점성마찰계수
: 영구자석의 누설자속
: 극수
: 축 전류
: 축 전압
: 회전자 전기 각속도
: 전자계 토오크
: 부하 토오크
전동기가 벡터제어기법에 의해 구동되고 내부에 전류제 어기를 포함한다고 가정하면, 축 상의 전류 는 영으로 가정할 수 있으므로 전동기에서 발생하는 토오크는 식(6) 과 같다.
(6)
여기서
나. 위치-속도 제어기 설계
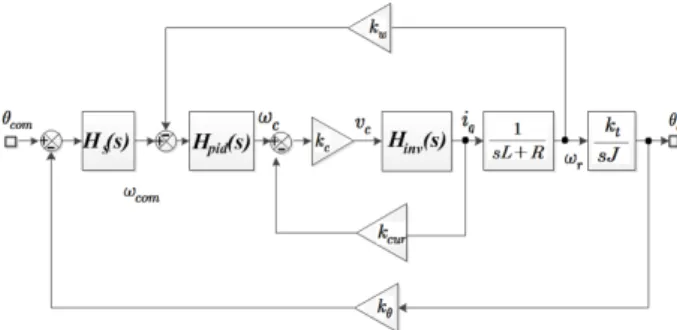
착유자동화 로봇의 매니퓰레이터는 그림 3의 x, y, z 축의 독립적인 구동축에 의하여 제어된다. 또한, 그림 4 와 같이 매니퓰레이터에 탑재된 착유컵 구동기를 젖소 유방으로 구동하게 된다. 착유컵을 젖소의 유두에 장착 하기 위해 레이저 유두인식 위치 명령값에 추종하도록 설계된 위치-속도제어기는 그림 9와 같다.
유두인식장치는 레이저센서를 이용하여 유두의 위치 를 검출하고, 착유 로봇 매니퓰레이터에 위치명령을 지 령하여 유두에 착유컵을 빠르고 정확하게 장착하도록 위치와 속도제어를 구현한다. 상기 유두인식장치와 3축 으로 이송되는 착유 로봇매니퓰레이터는 각기 독립적인 구동이 가능하며, 기계적인 진동을 제거하기 위한 외란 제거 형 PID 제어기를 설계한다[6].
그림 9. 착유로봇 매니퓰레이터의 위치·속도제어기 Fig. 9. The postion anc velocity controller of milking
mani -pulatort.
그림 5의 유두인식장치는 동적모델 로 근사화 한다. 젖소의 동적 움직임을 관측한 결과, 2Hz이하를 기준값으로 선정하였고, 의 동적 대역폭을 10Hz 로 설정하여 식(7)과 같이 2차 모델로 근사화하고
=0.5과 =62.8로 선정하였다.
(7)
그림 6의 착유컵 구동장치는 각기 2개의 서보모터, 볼스크류, LVDT로 구성된다. 유두인식장치의 위치명령 에 따라 착유컵 구동기의 PID 속도제어기는 매니퓰레 이터의 자체 진동과 토크 리플를 제거한다.
각 동적 주파수대역에 대한, 즉 11.6[Hz]이내 주파수 대역에는 2차 저역통과필터를 포함한 적분이득 는 식(8)을 적용한다. 중심주파수대역 21.9[Hz]에는 2차 대역통과필터를 포함한 미분이득 는 식(9)를 적용 함으로써 매니퓰레이터 자체 진동을 제거하고, 작유로 봇 시스템의 동적주파수 대역내에서 안정된 제어를 보 장하게 된다.
근궤적법과 필드시험에서 시행착오방법에 의하여, 식 (10)과 같이 속도제어기 의 비례이득 =0.35, 적분이득 =0.29, 미분이득 =0.03을 적용한다. 또한, 기계적 진동을 제거하기 위하여 각 필터함수의 댐핑계 수 =0.80, =0.48과 =72.8, =137.5를 적용한다.
(8)
(9)
(10)
그림 9에서 상전류제어형 인버터 와 피드백 상전류이득 , 구동모터의 근사화모델 과 피드백 속도이득 이 적용되어 속도제어를 구현된다.
또한, 부하 근사화 모델 의 위치각 출력의 피드백 이득 에 의하여 위치제어가 구현됨으로써, 착유로봇 매니퓰레이터의 위치-속도제어가 구현된다.
따라서 유두 인식장치의 레이저센서에 의하여 유두 스캐닝에서 검출된 유두 위치값이 매니퓰레이터의 위치 명령으로 인가되면, 식(10)의 PID속도제어기에 의하여 인버터에 보상된 속도신호 가 입력되어 구동모터의 속도를 제어하게 된다. 이 속도제어기는 구동축 3축에 위치 및 속도 제어할 수 있어서 매니퓰레이터의 속응성 과 추종성이 구현된다.
다. 착유로봇 통합 구동제어
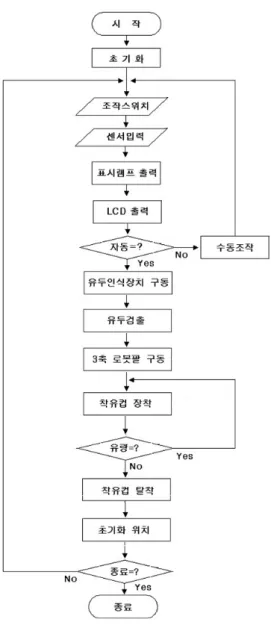
착유자동화 로봇시스템은 운용은 그림 10과 같이 유 두인식장치 구동, 유두 위치값 검출, 매니퓰레이터 구동 제어를 수행한다. 또한, 착유컵이 유두에 장착되면 유량 을 감지하여 착유컵 장착의 유무상태를 점검하고, 일정 이상의 유량이 확보되면, 유두별로 착유컵을 탈착하는 통합적인 제어 된다.
각 단계별 동작구현은 다음과 같다.
(1) 초기화 위치정렬 단계
유두인식장치와 착유로봇 매니퓰레이터의 위치상태 를 초기화 위치상태로 정렬시키고 각 레이저센서, LVDT센서의 위치상태 값을 표시램프와 LCD에 출력 한다.
(2) 유두인식 단계
운용모드가 수동모드이면 유두인식장치와 착유로봇 3 축 매니퓰레이터는 각각 수동조작이 된다. 또한 자동모 드이면 유두인식장치의 레이저센서를 이용하여 유두를 위치값을 스캐닝 함으로써 유두위치를 검출하게 된다.
(3) 착유컵 장착단계
검출된 유두 위치는 착유 로봇팔의 구동위치명령으 로 전환되어 3축으로 이송되는 착유로봇 매니퓰레이터
를 각각 구동하여 유두 정렬상태에서 착유컵을 장착하 게 된다.
(4) 착유컵 탈거단계
착유컵이 장착된 상태에서 유두별 개별적으로 설치 된 4개의 유량센서를 이용하여 유두별 유량상태를 판단 하여 유량이 없는 유두별로 착유컵을 탈거하게 된다.
(5) 착유컵 회수에 의한 착유 로봇팔 복귀단계 4개의 착유컵이 좌우측 착유대로 모두 탈거되면, 착 유 로봇 매니퓰레이터는 초기화 위치로 복귀하게 되고 착유 전과정 구동제어를 종료하게 된다.
그림 10. 착유로봇 구동제어 순서도
Fig. 10. The flow chart of milking robot control.
라. 제어기 하드웨어[7]
착유로봇 매니퓰레이터 제어반 회로는 각 독립축에 대하여 마이컴 PIC18F8720, 아날로그 입력신호 컨디셔
(a) (b) 그림 11. 임베디드 제어기 (a) 서보모터 드라이버,
(b) 임베디드 주제어반과 매니퓰레이터 제어반 Fig. 11. Embedded controller (a) Servo motor driver,
(b) Embedded main controller and manipulator controller
그림 12. 착유로봇 메니퓰레이터 제어보드 인터페이스 Fig. 12. Interface of milking robot manipulator.
너, 8채널 아날로그 처리기, 아날로그-디지탈 컨버터, 디지털-아날로그 컨버터, 12비트 병렬신호 인터페이스 회로EEPROM, RS232C 통신, 이더넷으로 구성된다.
이 제어반은 유두인식장치와 3축으로 이송되는 착유 로봇 매니퓰레이터의 위치 및 속도를 정밀제어 기능을 제공한다. 설계 제작된 착유로봇 제어용 인버터와 임베 디드 주제어반과 매니퓰레이터 제어기는 그림 11과 같다 주제어반과 제어보드, 레이저센서, LVDT와 고주파 센서 신호의 인터페이스는 그림 12와 같다. 또한, 임베 디드 주제어반과 매니퓰레이터 제어보드는 마이컴 PIC18F- 8720의 DIO 12비트 병렬신호처리가 되었고,.
또한 레이저 제어보드는 아날로그-디지탈 컨버터와 병 렬신호처리가 적용된다.
Ⅲ. 실 험
가. 젖소모형 Lab 실험
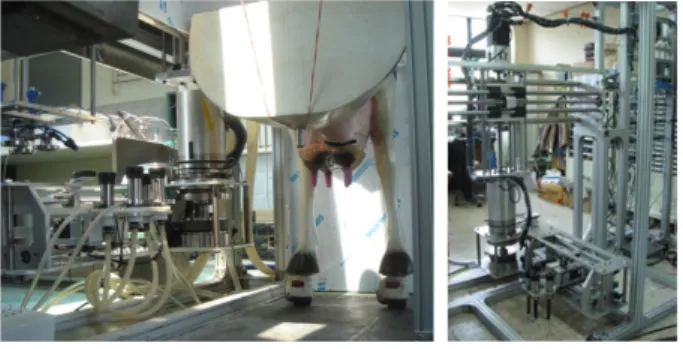
착유로봇 매니퓰레이터 제어성능 검증을 위하여 그 림 13과 그림 14와 같이 실험실에서 모형 젖소에 대한 착유로봇 매니퓰레이터 설계 제작되었다.
그림 13. 설계된 착유로봇 매니퓰리에터 Fig. 13. The designed milking robot manipulator.
(a)
(b) 그림 14. 유두인식 및 착유컵 구동제어실험
Fig. 14. The experiment of teat detection and teat-cups driving control.
감지거리가 100∼400 [mm]이고 동적대역폭이 100 [Hz]인 레이저센서가 적용되었다. 유두인식장치 및 착 유컵 구동장치에 대한 성능실험을 위하여, 그림 13과 그림 15와 같이 매니퓰레이터를 구현하고 움직일 수 있 는 모형 젖소를 대상으로 Lab실험을 실시하였다. 또한, 그림 14와 같이 레이저센서를 이용한 유두인식 및 착유 컵 장착 실험을 실시하였다.
그림 15. 설계된 착유 매니퓰레이터와 임베디드 제어보 드
Fig. 15. The designed milking manipulator and embedded control board.
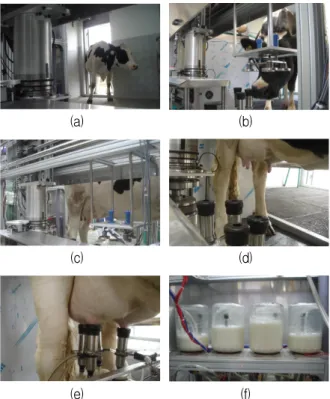
나. 젖소농장 착유실험
설계된 착유로봇시스템은 수원소재 축산과학원의 젖 소목장을 대상으로 착유성능 실험이 실시되었다. 본 실 험은 젖소에 착유로봇을 그림 16과 같이 적용한 실험을 수행하였다.
설계된 매니퓰레이터의 추종성능을 검증하기 위하여 그림 16과 같이 착유로봇 매니퓰레이터의 초기 위치상 태에서 위치명령에 의한 시간응답 실험을 실시하였다.
착유컵 구동축 g축과 매니퓰레이터의 각축 x, y, z축에 서 시간응답특성을 측정한 결과는 그림 17과 같으며, g, x, z축 출력신호는 각축에 설치된 LVDT 센서에 의하 여 측정되었으며, y축은 회전형 포텐시오미터에 의하여 검출되었다.
실험결과 매니퓰레이터의 x, y, z축과 착유컵 구동축 g축이 초기 위치상태에서 젖소 유두를 인식하고, 착유 컵을 장착하는 도달시간을 측정하였다. 이 도달시간
= 2.3[sec], = 3.2[sec], = 1.5[sec], = 1.2[sec]에 착유컵이 유두에 장착되었다. 또한 각 축에 대한 최대 구동속도는 = 150[mm/sec], = 40 [deg/sec], =
(a) (b)
(c) (d)
(e) (f)
그림 16. 젖소의 착유로봇 매니퓰레이터 동작실험 Fig. 16. The operating experiment of milking robot
manipulator for cow.
(a) (b)
(c) (d) 그림 17. 착유로봇 매니퓰레이터의 시간응답 특성 Fig. 17. Time responses of milking robot manipulator.
(a) x axis(0.5sec/div, 100mm/div) (b) y axis(0.5sec/div, 40deg/div) (c) g axis(0.5sec/div, 100mm/div) (d) z axis(0.5sec/div, 20mm/div)
253[mm/sec], = 42[mm/sec]로 측정되었다. 도달시간 및 최대 구동속도의 측정 실험결과, 표 2의 착유로봇 매니퓰레이터 설계사양을 모두 만족함을 확인하였다.
기존 외국 착유로봇과 성능을 비교해 보면, Lely, Delaval, Orion, Prolion 제품은 매니퓰레이터의 액츄에 이터로 공압 실린더를 사용하고 있다. 또한, 기존 로봇 은 1개의 유두에 착유컵을 순차적으로 착유하는 매니퓰 레이터의 구동방식이다.
본 논문에서 제안한 매니퓰레이터는 그림 6과 그림 7 과 같이 좌우 동시에 착유컵 장착이 가능하여 장착시간 을 기존 착유로봇에 비하여 40%정도 감소할 수 있다.
또한 기존 로봇의 공압방식에 비하여 본 제안된 착유로 봇은 모든 구동장치가 전기구동 방식이기 때문에 무소 음으로 젖소 적응훈련시간을 기존제품 2주일에서 1주일 이내로 감소할 수 있다. 특히 젖소의 착유 스트레스를 최소화할 수 있는 장점을 가지고 있다.
Ⅳ. 결 론
착유로봇은 농가의 부족한 노동력을 제공하고 착유 시 에 감염될 수 있는 세균 감염을 예방함으로써 유질 을 향상시킬 수 있다[1~2, 5]. 착유로봇 시스템은 움직이 는 젖소의 유두 위치를 정확하게 검출하고, 로봇 매니 퓰레이터는 검출된 유두 위치값을 추적하여 착유컵이 장착되어야 한다. 제안된 착유로봇 매니퓰레이터는 위 치검출 레이저 센서를 이용하여 유두를 스캐닝하고 임 베디드 제어장치를 통하여 독립된 3축 구동메커니즘에 의하여 제어된다. 이 로봇 매니퓰레이터는 유두 위치검 출용 레이저센서, 4개의 착유컵, 3축 매니퓰레이터, 임 베디드 제어유닛과 자동 밀크 제어라인으로 구성된다.
제안된 로봇시스템은 구조가 간단하고 저가이며, 로 봇 매니퓰레이터가 전동기를 사용함으로써 전기구동 소 음이 적다는 장점을 가지고 있다. 설계된 로봇은 수원 축산과학원에서 젖소를 대상으로 실험을 실시하였으며, 그림 16과 같은 착유실험을 통하여 착유로봇의 설계 성 능조건에 대하여 만족함을 확인하였다.
본 연구는 착유로봇의 매니퓰레이터와 임베디드 구 동제어장치에 관한 것으로 추후 부가적인 세척기능과 소독기능을 추가하게 되면, 국내 보급형 착유로봇모델 개발이 가능할 것이다.
저 자 소 개 신 규 재(정회원)
1985년 원광대학교 전자공학과 학사 졸업.
1988년 전북대학교 전기공학과 석사 졸업.
2009년 부산대학교 전기공학과 박사 졸업.
1988년∼1991년 해군기술병과학교 기술교관 충남함 전자관
1991년∼1997년 ㈜두산 방위산업기술연구소 주임연구원
1997년∼2014년 순천제일대학교 전기자동화과 교수
2014년 9월∼현재 부산외국어대학교 디지털미디 어학부(전자정보통신전공) 교수
<주관심분야 : 로봇제어, 안정화 자세제어, 극한 환경로봇, 수중로봇, 1인승 전기차량, 태양광발전 원격제어, 메카트로닉스 산업응용>
REFERENCES
[1] Y. U. Kim, “Dairy”, Rural development agency, 2003.
[2] D. Butler, L. Holloway, C. Bear, “The impact of technological change in diary farming : Robotic milking systems and changing role of the stockperson” Journal of the royal agricultrural society of England, Vol. 173, pp.1∼6, 2012.
[3] W. Kim and D. W. Lee, “Development of teat-cups attachment module for robot milking system”, J. of biosystems Eng., Vol.30, No.3, pp.179~184, 2005.
[4] D. J. Reinemann, P. L. Ruegg and M. A. Davis,
“Assessment of robotic milking in wisconsin”, The 2001 ASAE Annual international meeting, paper No. 013008, August 2001.
[5] K. J. Shin, “Development of milking robot system” Report of Ministry of Agriculture and Forestry, suncheon first college, 2007.
[6] C. W. Cho, “Design of a nonlinear multivariable self-tuning PID controller based on neural network" Journal of the IEEK, vol.44, SC no.6, pp.394∼403, 2007.11
[7] K. J Shin and D. J Kwon, “Milking automatic robot and milking automatic method”, Patent no.
10-2007-0099351, Oct. 2007.
[8] Y. Dote and S. Kinoshita, “Brushless Servo motors Fundamentals and application”, Oxford, 1990.
[9] I. Boldea and S. A. Nasar, “Electric drives”, CRC press, 1999.