1. 서 론
반도체를 중심으로 한 전자산업의 지속적이고 비약적인 성장은 현대사회 산업 전반의 패러다임 을 변화시키고 있으며 과거 산업혁명에 비견할만 한 전자혁명시대를 주도하고 있다.
이러한 반도체산업에서 관련 장비 산업은 중요 한 부분을 차지하고 있는데 현재 유수의 반도체, 칩(chip) 제조업체들은 매출액의 약 20% 정도를
반도체 장비구입에 쓰고 있다 우리나라의 경우. 세계 반도체 칩 제조 산업에 있어서는 중요한 위 치를 차지하고 있지만 반도체 장비 산업은 상대, 적으로 낙후된 상황이며 국내 반도체 칩 제조, 산업에 쓰이는 대부분의 반도체 칠러들은 미국이 나 일본 유럽 업체들로부터 수입하고 있는 실정, 이다.
(1)
반도체 공정용 칠러(chiller)는 웨이퍼(wafer)의 표면을 화학적 또는 물리적으로 반응시키는 과정 에서 발생하는 챔버 및 웨이퍼 척의 온도 상승을 제어하여 안정된 공정 진행을 통한 양질의 웨이 퍼를 생산하기 위한 장비이다.
(2)
(Received April 5, 2011 ; Revised September 14, 2011 ; Accepted September 15, 2011)
Key Words: Control(제어), EEV(전자식 팽창밸브), PCW(냉각수), PWM(펄스폭 변조방식), Semiconductor
반도체 칠러 스텝모터 구동방식
Chiller( ), Step Moter Operated( )
초록: 본 연구에서는 전자식 팽창밸브를 적용한 반도체 공정용 칠러에 관한 실험적 연구를 통해 시스템 특성 을 파악하였다 또한 온도 변화에 따른 신속한 대응을 할 수 있도록 온도상승 및 하강실험 부하변화에 따른. , 온도영역별 제어정밀도 실험을 함으로써 각 제어 방식에 따른 운전 특성을 파악하였다 온도상승 시 소비전력. 은 8.9 kW로 측정되었으며 CH1이 37.5 , CH2분 가 39.5분이 소요되었으며 온도하강에는 총, 26.5분이 소요되었 다 부분부하가 적용되는 경우 전부하가 적용되는 경우에 비해 제어정밀도의 변화폭이 큰 것으로 나타났으며. 스텝모터 구동방식을 적용한 CH2의 제어정밀도가 상대적으로 우수한 것으로 나타났다 냉각수를 이용한 냉각. 사이클 영역에서 소비전력은 1.8 kW로 냉동사이클을 적용한 방식에 비해 절반가량으로 감소된 것으로 나타났 다 본 연구는. 실험결과를 바탕으로 반도체 공정용 칠러의 최적제어방안을 제시하였다.
Abstract: The characteristics of a semiconductor chiller system with EEV have been experimentally studied. Three experiments on temperature changes (increase and decrease), load variation, and control precision were conducted to investigate the operating characteristics of the semiconductor chiller. The power consumption was 8.9 kW during increase in temperature. The required time was 37.5 min for CH1 and 39.5 min for CH2. Moreover, the time required for falling temperature was 26.5 min. The control precision for partial load operation was relatively low compared to that of a full load operation. In addition, the CH2 equipped with a step motor showed better control precision. The power consumed by the chiller for process cooling water was 1.8 kW, which was one-half of that consumed during the refrigeration cycle. The objective of this study is to provide an optimal control guideline for the semiconductor chiller design.
Corresponding Author, [email protected]
2011 The Korean Society of Mechanical Engineers
Ⓒ
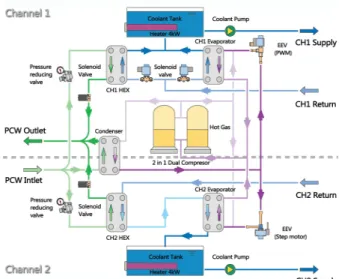
Fig. 1 Schematic diagram of semiconductor cooling process
일반적으로 반도체 공정용 칠러는 압축 응축, , 팽창 증발의 과정을 거치는 냉동사이클 오토캐, , 스케이드 방식을 이용한 냉동사이클 그리고 냉각 수를 활용한 냉각사이클을 이용하며 Fig. 1에서와 같이 챔버 벽면(chamber wall)을 30 ~ 80℃, 바닥 면(chamber bottom)을 -10 ~ 40℃의 범위에서 개 별적으로 채널(channel)의 온도를 정밀하게 제어 한다 반도체 공정용 칠러는 일반적인 산업용 칠. 러와는 달리 24시간 년중 지속적인 운전이 이루 어지기 때문에 소비전력량이 매우 큰 특징을 가 지며 이로 인해 최적 운전제어를 통한 저소비 전 력 칠러 의 필요성이 대두되고 있는 실정이다.
차 등
(3~5)
은 선행연구를 통해 개별 사이클로 구성된 반도체 공정용 칠러의 실험적 연구를 통하 여 에너지 절감 방안을 제시함과 동시에 듀얼채 널을 적용한 반도체 공정용 칠러의 최적 제어 를 위한 연구를 진행하였다.
본 연구에서는 국내에서 제작된 모델로 채널별 로 각기 다른 종류의 전자식 팽창밸브(EEV, Electric 를 적용한 반도체 공정용 칠러에 Expansion Valve)
관한 실험적 연구를 통해 시스템 특성을 파악하 였다.
또한 실제 공정에서 설정온도 변화에 따른 신 속한 대응을 할 수 있도록 온도상승 및 하강실 험 부하변화에 따른 온도영역별 제어정밀도 실, 험을 함으로써 각 제어 방식에 따른 운전 특성을
Fig. 2 Schematic diagram of experimental setup for semiconductor product chiller
(a) Schematic diagram of CH1
(b) Schematic diagram of CH2 Fig. 3 Schematic diagram of electric expansion valve
파악하고 실험결과를 바탕으로 반도체 공정용 칠 러의 최적 제어방안을 제시하고자 한다.
실험장치 및 방법 2.
2.1 실험장치
는 본 연구의 실험대상인 반도체 공정용 Fig. 2
이브리드 방식으로 구성하였다.
은 채널별로 적용된 전자식 팽창밸브와 Fig. 3
냉수의 흐름을 나타낸 것이다 냉각수를 이용한. 냉각사이클에서는 동일한 솔레노이드밸브를 이용 해 유량제어를 하는 반면 냉동사이클 영역에서 는 CH1은 펄스폭 변조방식, CH2는 스텝모터 구 동방식을 각각 적용하였다.
은 온도영역별로 적용되는 온도제어방 Table 1
식과 팽창밸브의 종류를 나타낸 것이다. 28℃ 미 만인 지점에서는 냉동사이클이 작동하게 되며 각 채널은 병렬로 연결된 3HP급 압축기(compressor), 응축기(condenser), 팽창장치(expension device), 증 발기(evaporator), 열교환기(heat exchanger)로 구성 된 동일한 냉동사이클이다. 각 채널은 PID제어를 통한 냉매제어방식과 핫가스 바이패스제어방식을 적용하였다 채널별로 증발기 출구와 냉수 입구. · 출구에 각각 온도센서를 설치하여 냉수(coolant)의 온도를 측정하고 이를 통해 냉각 제어온도를 산 출하였다 산출된 제어값은 컨트롤러를 통해 전. 자팽창밸브와 핫가스 바이패스밸브로 전송되고 설정된 온도제어구간별 PID제어값에 따라 온도를 제어하였다.
이상의 온도영역에서는 반도체 공정에서 28℃
항상 일정하게 유입되는 냉각수를 활용한 냉각방 식을 사용하였다. 냉각수는 반도체 생산공정을 지속적으로 순환하며 장비에서 발생하는 열을 제 거하기 위한 용도로 사용된다 공정에 따라 생산. 장비에서 요구하는 온도는 상이하지만 20℃로 공 급되어 25℃로 배출되는 것이 일반적이다 공정. 내부 냉각수의 온도분포와 측정 오차범위 등을 고려하여 28℃를 운전모드 변환점으로 설정하였 으며 현재온도(PV, present vlue)가 28℃이상인 영 역에서 냉각수를 이용한 냉각방식이 적용되도록
Heating load JIG 7 kW (3/4″) 25m×2
Fig. 4 Photograph of experiment apparatus
하였다. 냉각수는 감압밸브(pressure reducing 를 통해 일정한 압력으로 유입되며 각 채널 valve)
별로 PID제어방식의 솔레노이드 밸브(solenoid 를 이용한 냉각수 유량제어 방식을 적용하 valve)
였다.
는 본 실험에 사용된 반도체 칠러의 상 Table 2
세 사양을 나타낸 것이다 병렬로 연결된 압축기. 는 3HP의 왕복동식 압축기를 사용하였으며 대수 제어를 통해 부하변동에 따른 제어가 가능하도록 하였다. 냉수펌프(coolant pump)는 2HP magnetic 응축기 및 증발기는 대향류 판형열교환기를 type,
사용하였다 냉수탱크 내부에. 4 kW의 히터를 삽 입하여 탱크 내부의 온도를 제어하였다.
는 실제 반도체 공정을 순환하는 냉수의 Fig. 4
부하조절을 모사하기 위한 실험장치 사진이다.
채널별로 3/4″배관을 25m 길이로 설치하였으며 배관에 삽입된 7 kW의 히터를 통해 실제 반도체 공정과 동일하게 채널별로 일정한 부하를 유지하 도록 하였다 전압조정기를 통해 연결된 히터는.
전류 전압 변성기를 이용해 출력을 측정하였다, . 압축기 구동에 필요한 전력을 측정하기 위해 전력계를 설치하였으며 열전대와 유량계 유량범( 위 : 2 m
3
/h)를 이용해 냉각수 입 출구의 온도와· 유량을 측정하였다. 냉각수는 항온조를 이용해 일정한 온도를 공급할 수 있도록 하였다 시스템. 각 부분에 설치된 고 저압 압력계와· T-type 열전 대를 통해 압력과 온도 측정을 하였으며 측정된 데이터는 다채널 데이터 수집장치(DA100, 40CH) 와 RS-232C케이블을 이용해 PC로 전송하여 처리 하였다 각 계측장비는 보정. (calibration) 후 사용 되었으며 계측장비의 오차는 유량 ±0.1%, 온도±0.15%, 압력 ±0.1%이다.
(6)
2.2 실험방법
현재 반도체 공정용 칠러의 성능평가실험에 대 한 별도의 기준이 정립되어 있지 않은 상태이다.
따라서 본 연구에서는 현재 출시되고 있는 반도 체 공정용 칠러 중 제어정밀도와 안정성이 가장 우수하다고 평가되고 있는 일본 SMC사 칠러의 성능평가실험 조건을 반영하였다.
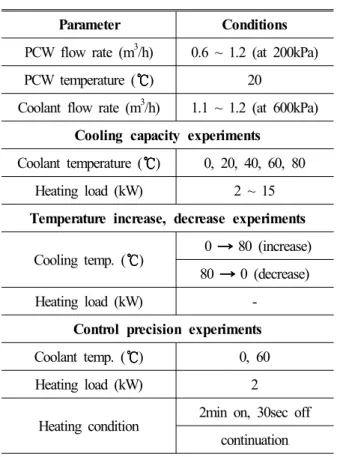
은 반도체 공정용 칠러의 실험조건을 Table 3
나타내고 있으며 실험은 각 채널의 온도영역별 냉각능력 실험, 무부하 운전 시의 온도상승 및 하강실험 사용 빈도가 높은 온도영역에서 부하, 방식에 따른 제어정밀도 실험 순으로 하였다 실. 험은 먼저 항온조에서 냉각수를 일정한 유량과 압력 조건으로 유입시키고 목표온도를 설정한 후 칠러를 가동하여 냉수(coolant)의 급수(supply), 환 수(return)의 온도변화 폭이 ±0.5℃, 압력은 ±5 kPa 범위에 있을 때 정상상태에 도달하였다고 판단하 고 실험을 진행하였다.
는 본 연구에 사용된 전자식 팽창밸브 Table 4
의 제어영역을 나타낸 것으로 CH1의 펄스폭 변 조방식은 0 ~ 6 (sec), CH2의 스탭모터 구동방식 은 48 ~ 448 (step)으로 개별적인 PID제어를 통해 동일한 개도를 설정하였다 모든 실험은. CH1과 가 채널별로 개별적인 운전을 하는 경우에 CH2
대해 진행하였다.
냉각능력 실험은 냉수 급수온도가 ±0.5℃ 범위 를 유지하는 정상상태에서 가열히터에 의한 부하 조건을 변경하며 실험을 진행하였다 변경된 부. 하조건에서 시스템이 일정시간 약( 10min) 이내에 정상상태로 안정되면 해당 부하조건에 대한 온도
제어가 가능하다고 판단하였다 유입되는 냉수의. 압력은 감압밸브(pressure reducing valve)를 이용하 여 600 kPa로 일정하게 유지하였으며 부하조건, 변화에 따른 시스템의 온도 압력 및 소비전력, 등을 측정하였다.
온도상승 및 하강실험은 냉수의 급수온도가 범위에서 안정이 되면 가열히터에 의한
±0.5℃
부하조건이 없는 상태에서 목표온도를 80℃와 로 설정하여 운전을 하였다 이때 목표온도까
0℃ .
지 도달하는 시간 및 소비전력을 측정하여 최적 의 운전조건을 도출하고자 하였다.
제어정밀도 실험은 반도체 공정에서 주로 사용 되는 온도영역인 0℃와 60℃ 상태에서 가열히터 에 의한 부하조건 2 k W가 운전 중 지속되는
Parameter Conditions PCW flow rate (m
3
/h) 0.6 ~ 1.2 (at 200kPa) PCW temperature ( ) 20Coolant flow rate (m
3
/h) 1.1 ~ 1.2 (at 600kPa) Cooling capacity experimentsCoolant temperature ( ) 0, 20, 40, 60, 80 Heating load (kW) 2 ~ 15 Temperature increase, decrease experiments
Cooling temp. ( ) 0 80 (increase) 80 0 (decrease) Heating load (kW) -
Control precision experiments Coolant temp. ( ) 0, 60 Heating load (kW) 2
Heating condition 2min on, 30sec off continuation Table 3 Experimental conditions
Ratio of opening Opening condition PWM 0, 25, 50, 100 (%) 0, 3, 4.5, 6(sec) Step motor 0, 25, 50, 100 (%) 48, 148, 248, 448 (step)
Table 4 Expansion valve control
(1)여기서,
와
는 냉수의 질량유량과 정압 비열이다.
,
는 채널별 냉수 입구 출구, 온도를 나타낸다.에너지 소비효율(EER)은 냉각능력과 시스템 소 비전력의 비로서 식 (2)를 이용하여 구하였다.
total
(2)
여기서,
total
은 압축기와 펌프에서 소비되는 전력을 합산한 값이다실험결과 및 고찰 3.
온도별 냉각능력 및 성능변화 3.1
는 각 채널별 설정 온도에 따른 냉각능력 Fig. 5
과 에너지소비효율을 보여주고 있다 냉각능력의.
Supply temperature ( ℃ )
0 20 40 60 80
C o o li n g c a p a c it y ( k W )
0 2 4 6 8 10
E E R
0 2 4 6 CH1 Cooling capacity 8
CH2 Cooling capacity EER
PCW 2 kg/cm
2Brine 6 kg/cm
2Fig. 5 Variation of cooling capacity and EER with supply temperature
온도상승 및 하강실험 3.2
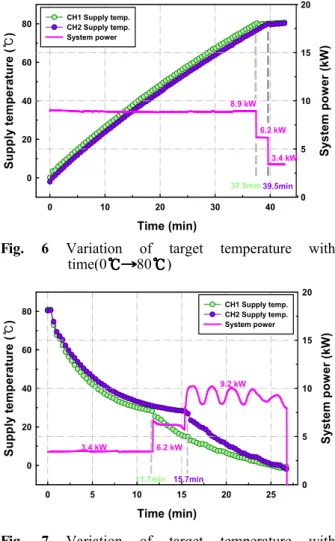
은 무부하 상태에서 냉수의 급수온도가 Fig. 6
정상상태인 0℃에서 목표온도 설정치인 80℃까지 상승하는데 소요되는 시간 및 시스템 소비전력을 나타낸 것이다 본 연구에서 사용된 반도체 공정. 용 칠러는 온도상승 시 냉수탱크 내부의 히터와
Time (min)
0 10 20 30 40
S u p p ly t e m p e ra tu re ( ) ℃
0 20 40 60 80
S y s te m p o w e r (k W )
0 5 10 15 20 CH1 Supply temp.
CH2 Supply temp.
System power
37.5min 39.5min 8.9 kW
6.2 kW
3.4 kW
Fig. 6 Variation of target temperature with time(0 80 )
Time (min)
0 5 10 15 20 25
S u p p ly t e m p e ra tu re ( ) ℃
0 20 40 60 80
S y s te m p o w e r (k W )
0 5 10 15 20 CH1 Supply temp.
CH2 Supply temp.
System power
11.7min 15.7min
3.4 kW 6.2 kW
9.2 kW
Fig. 7 Variation of target temperature with time(80 0 )
핫가스(hot gas)를 동시에 사용하였다.
실험결과 CH1(펄스폭 변조방식 이) 37.5분, CH2 스텝모터 구동방식 가 분이 소요되었으며
( ) 39.5
이 분가량
CH1 2 빠르게 목표온도에 도달함을 알 수 있다 이는 초기 구동 시. CH1의 온도가 미세 하게 높았던 것이 온도상승 전 구간에 걸쳐 반영 됨과 동시에 채널별 히터의 PID 제어값의 차이와 핫가스의 불균일한 분배가 주된 요인으로 작용한 것이라 판단된다.
소비전력은 온도상승 전 구간에 걸쳐 8.9 kW 로 일정하게 나타나며 칠러 구동 초기에 비해 목 표온도에 근접 할수록 근소하게 소비전력이 감소 하는 경향을 나타내었다.
온도상승 시 냉수탱크 내부 히터에 의한 가열 로 온도를 상승시키는데 CH1의 냉수 급수온도가 목표온도에 도달함과 동시에 히터 작동이 중단되 면서 소비전력은 8.9 kW에서 6.2 kW로 2.7 kW가 량 감소되고 이어서 CH2의 히터 작동이 중단되는 지점에서 소비전력은 3.4 kW로 2.8 kW가량 추가 적으로 감소됨을 알 수 있다.
은 무부하 상태에서 냉수의 급수온도가 Fig. 7
정상상태인 80℃에서 목표온도 설정치인 0℃까지 하강하는데 소요되는 시간 및 시스템 소비전력을 나타낸 것이다. CH1(펄스폭 변조방식 과) CH2(스 텝모터 구동방식 모두) 0℃로 도달하는데 총 26.5 분이 소요되었다.
본 연구에 사용된 반도체 공정용 칠러는 온도 영역을 기준으로 28℃ 이상의 온도영역에서는 2 의 온도로 일정하게 순환되는 냉각수를 활용 0℃
한 냉각사이클을 적용하고 그 이하 온도에서는 냉동사이클을 적용하고 있는데 이러한 특징은
의 결과에서도 나타난다
Fig. 7 .
칠러 초기 구동 시에는 냉각수를 이용하는 냉 각사이클이 적용되며 냉수의 급수온도는 급격하 게 감소되다 점차 완만해지는 경향을 보인다 이. 후 CH1이 11.7분 지점, CH2가 15.7분 지점에서 냉각수를 이용한 냉각사이클에서 냉동사이클로 전환되면서 다시 빠른 속도로 냉수 급수온도가 하강하는 것을 확인할 수 있었다.
소비전력은 냉각수 적용영역에서 3.4 kW로 일 정한 경향을 보이고 CH1과 CH2의 냉동사이클이 적용되는 지점에서 소비전력이 6.2 kW, 9.2 kW로 각각 2.8 kW, 3.0 kW 씩 증가하는 것으로 확인됐 다. CH1의 경우 시스템 설정온도인 28℃에 접근
함과 동시에 냉동사이클로 신속한 전환을 한다.
하지만 Fig. 7에서 CH2의 경우 28℃ 부근에 근 접함에도 냉동사이클로 전환되지 못하고 일정시 간 온도가 유지되는 것을 확인할 수 있다 이는. 제어가 효과적으로 작용하지 못했기 때문이라 PID
사료되며 이로 인해 소비전력의 증가폭 역시 에 비해 크게 나타나는 것이라 판단된다
CH1 .
또한 CH2의 냉동사이클이 적용되는 지점에서 는 소비전력이 일정하게 유지되지 못하고 ±0.95 의 폭으로 파형을 그리는데 이는 냉수 급수온 kW
도가 목표온도에 접근하면서 온도제어를 위해 히 터가 간헐적으로 작동하기 때문인 것으로 판단된 다 이러한 경향은 목표온도인. 0℃에 접근할수록 그 폭이 점차 감소되는 것을 확인할 수 있다.
부하방식에 따른 제어 정밀도실험 3.3
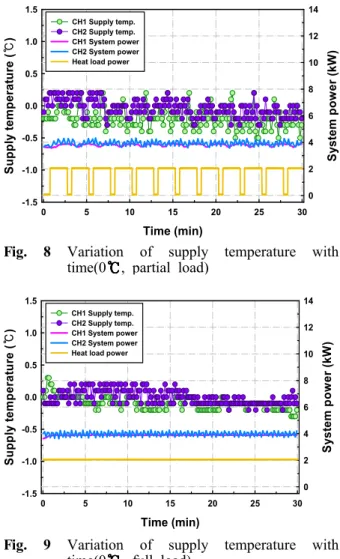
과 는 냉수 급수온도의 설정온도가 Fig. 8 Fig. 9
인 경우 부분부하와 전부하에 대한 제어정밀 0℃
Time (min)
0 5 10 15 20 25 30
S u p p ly t e m p e ra tu re ( ) ℃
-1.5 -1.0 -0.5 0.0 0.5 1.0 1.5
S y s te m p o w e r (k W )
0 2 4 6 8 10 12 14 CH1 Supply temp.
CH2 Supply temp.
CH1 System power CH2 System power Heat load power
Fig. 8 Variation of supply temperature with time(0 , partial load)
Time (min)
0 5 10 15 20 25 30
S u p p ly t e m p e ra tu re ( ) ℃
-1.5 -1.0 -0.5 0.0 0.5 1.0 1.5
S y s te m p o w e r (k W )
0 2 4 6 8 10 12 14 CH1 Supply temp.
CH2 Supply temp.
CH1 System power CH2 System power Heat load power
Fig. 9 Variation of supply temperature with time(0 , full load)
매유량 자체를 제어할 수 없다 반면에. CH2의 스 텝모터 방식은 밸브의 개도를 조절함으로써 냉매 유량을 가변적으로 제어할 수 있기 때문에 CH1 의 펄스폭 변조방식보다 상대적으로 정밀한 제어 가 이루어진다고 판단된다 이러한 경향은 부하. 발생이 일정치 않고 공급 중단이 반복되는· 부분
Time (min)
0 5 10 15 20 25 30
S u p p ly t e m p e ra tu re ( ) ℃
59.0 59.5 60.0 60.5 61.0
S y s te m p o w e r (k W )
0 2 4 6 8 10 CH1 Supply temp.
CH2 Supply temp.
CH1 System power CH2 System power Heat load power
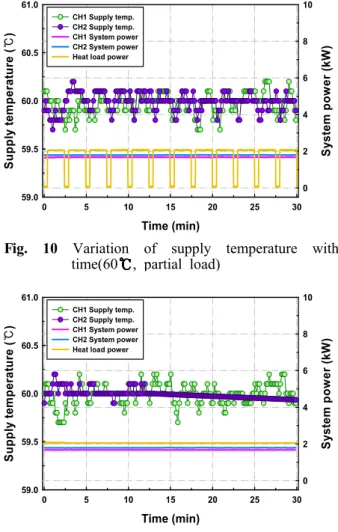
Fig. 10 Variation of supply temperature with time(60 , partial load)
Time (min)
0 5 10 15 20 25 30
S u p p ly t e m p e ra tu re ( ) ℃
59.0 59.5 60.0 60.5 61.0
S y s te m p o w e r (k W )
0 2 4 6 8 10 CH1 Supply temp.
CH2 Supply temp.
CH1 System power CH2 System power Heat load power
Fig. 11 Variation of supply temperature with time(60 , full load)
문에 소비전력 변화 폭이 상대적으로 넓게 나타 난 것으로 판단된다 특히 부분부하의 경우 소비. 전력의 변화주기는 전부하와 동일하지만 변화 폭 이 훨씬 좁게 나타나는 것을 확인할 수 있다.
과 은 설정온도가 인 경우
Fig. 10 Fig. 11 60℃
부분부하와 전부하에 대한 제어정밀도 실험 결과 이다. 0℃의 경우 작동방식이 각기 다른 전자팽 창밸브가 적용되어 채널별로 제어정밀도가 상이 하게 나타났지만 냉각수를 활용하는 60℃의 경우 두 채널 모두 솔레노이드 밸브를 통한 냉각수의 유량제어 방식을 취하고 있기 때문에 두 채널의 온도 변화 폭이 일치하는 것을 확인할 수 있었 다. 냉수 급수온도는 부분부하의 경우 ±0.25℃, 전부하에서는 ±0.2℃ 범위에서 온도가 안정되는 것으로 나타났다 냉각수를 활용하는 경우 냉각. 수 열량으로 인해 냉각능력이 향상되기 때문에 냉동사이클을 적용하는 경우에 비해 안정적인 온 도제어가 가능하다고 판단된다.
소비전력은 냉동사이클이 구동되는 경우에 비 해 절반가량 줄어든 1.8 kW에 일정하게 유지되 는 것을 확인할 수 있었으며 이는 압축기에 의한 전력소비가 없기 때문인 것으로 판단된다.
4. 결 론
반도체 공정용 칠러의 채널별 제어특성에 관한 실험적 연구를 통해 다음과 같은 결론을 얻었다.
온도별 냉각능력 및 에너지 소비효율은 온 (1)
도상승에 따라 냉각능력도 상승되는 경향을 보인 다 냉각수를 활용하는 경우 냉각수 자체의 열량. 으로 인해 냉각능력이 상승하는 것을 확인할 수 있으며 에너지 소비효율 역시 크게 개선되는 것 으로 나타났다 따라서 반도체 공정용 칠러에 온.
도영역별 운전모드 전환방식 적용시키는 경우 부 하변동에 따른 응답성과 시스템 전체의 에너지 소비효율 향상이 가능하다고 판단된다.
본 연구에서 사용된 반도체 공정용 칠러는 (2)
온도상승 시 소비전력이 8.9 kW로 측정되었으며
은 분 는 분이 소요되었다 온도
CH1 37.5 , CH2 39.5 . 하강 시 냉각수 냉각사이클 영역에서는 3.4 kW 의 전력 소모를 보이며 온도가 급격하게 떨어지 는 경향을 보이다 냉동사이클 구간에서 채널별로 씩 소비전력이 증가하며 온도하강 2.8 kW, 3.0 kW
시간이 미세하게 지연되는 경향을 보였다.
의 경우 냉동사이클로 전환이 원활하게 이 CH2
루어지지 못해 소비전력량이 크게 증가하는 것을 확인할 수 있었으며 PID제어 변경을 통한 보완이 이루어져야 함을 알 수 있었다.
에서 제어정밀도는 부분부하의 경우 (3) 0℃
이 가 전부하는 이
CH1 ±0.35℃, CH2 ±0.25℃, CH1 가 로 부분부하가 적용되는 경
±0.3℃, CH2 ±0.2℃
우가 제어정밀도의 변화폭이 큰 것으로 나타났 다. 이를 통해서 냉동사이클을 이용하는 0℃ 구 간은 CH1(펄스폭 변조방식 에 비해) CH2(스텝모 터 구동방식 을 적용하는 경우 보다 정밀한 제어) 가 이뤄지며 부하변동에 의한 응답성이 우수함을 알 수 있었다.
영역의 제어정밀도는 부분부하 전부하
(4) 60℃ ·
에서 각각 ±0.25℃, ±0.2℃로 냉동사이클 영역보 다 안정적으로 온도를 제어하는 것으로 나타났으 며 입력 부하방식에 따른 영향은 미비한 것으로 나타났다 냉각수를 이용하는 경우 압축기가 적. 용되지 않기 때문에 소비전력은 1.8 kW로 냉동 사이클을 적용한 경우에 비해 소비전력이 절반가
량으로 감소된 것으로 나타났다.
후 기
본 연구는 2009년도 지식경제부의 재원으로 한 국에너지 기술평가원 (과제번호:2009T100100639) 의 지원을 받아 수행한 연구 과제입니다.
참고문헌
(1) KISTI, 2009, "State of Art Technology in Semiconductor Equipment," pp. 1~36
(2) Cha, D. A., Kwon, O. K., Yun, J. H. and Kim, D. Y., 2010, "An Experimental Study on Semi-conductor Process Chiller for Energy Saving," Proceeding of the KSME Spring Annual Conference, pp. 371~376.
(3) Cha, D. A. and Kwon, O. K., 2010, "An Study on Semiconductor Process Chiller with Variation of Control Methods," Proceeding of the KSME Autumn Annual Conference, pp. 2632~2637.
(4) Cha, D. A. and Kwon, O. K., 2010, "An Experimental Study on Semiconductor Process Chiller for Dual Channel," Trans. of the SAREK Vol. 22, No. 11, pp. 760~766.
(5) Cha, D. A., Kwon, O. K. and Oh, M. D., 2010, "An Experimental Study on Process Chiller for Semiconductor Temperature Control," Trans.
of the KSME (B) Vol. 35, No. 5, pp. 459~465.
(6) Holman, J.P., 2000, "Experimental Method for Engineer," 7th ed., McGraw-Hill, pp. 51~60.