1. Introduction
The exploration of the Moon had been tried actively at the 1960’ s and 1970’ s mainly by Russia and USA but not a little countries are trying to explore the Moon recently. SMART-1 was launched by ESA in 2003 (Shim, 2008). SELENE was sent to the moon in 2006 by Japan. Chang ’ e-1 was launched
in 2007 by China and Chandrayan-1 was developed and launched in 2008 by India (Shin et al, 2008). The primary goals of these spacecrafts were not identical and many different kinds of payloads were equipped on those spacecraft. Some of them had spectrometers and some of them had scientific instrument to understand the environments of the lunar surroundings (Sun et al., 2005). However, most of the
Design & Test of Stereo Camera Ground Model for Lunar Exploration
Haeng-Pal Heo
†, Jong-Euk Park, Sang-Youn Shin and Sang-Soon Yong Payload Electronics Department, Korea Aerospace Research Institute
Abstract : Space-born remote sensing camera systems tend to be developed to have very high performances. They are developed to provide extremely small ground sample distance, wide swath width, and good MTF (Modulation Transfer Function) at the expense of big volume, massive weight, and big power consumption. Therefore, the camera system occupies relatively big portion of the satellite bus from the point of mass and volume. However, the camera systems for lunar exploration don’t need to have such high performances. Instead, it should be versatile for various usages under various operating environments.
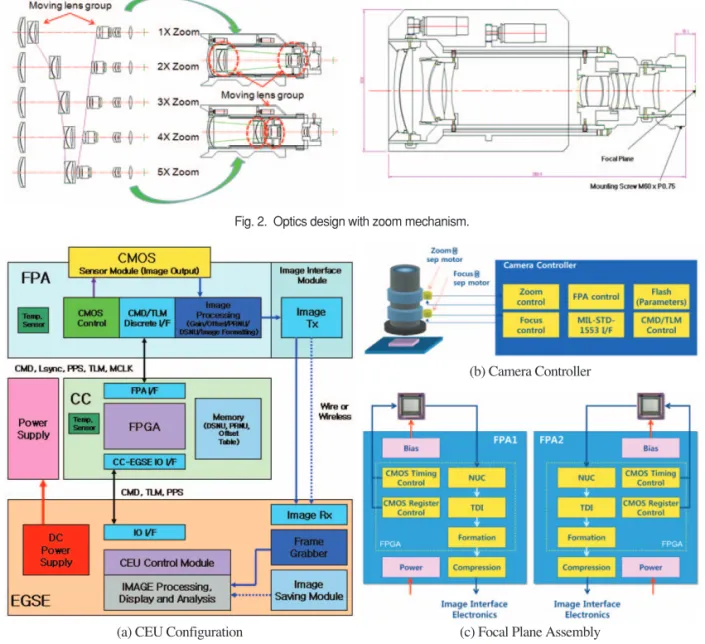
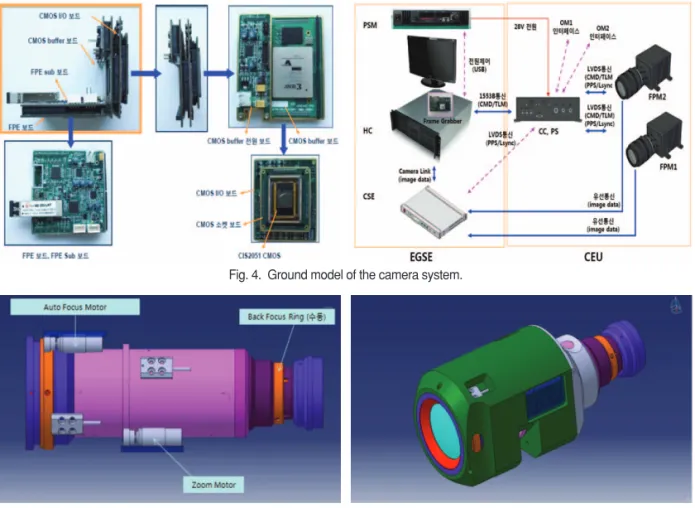
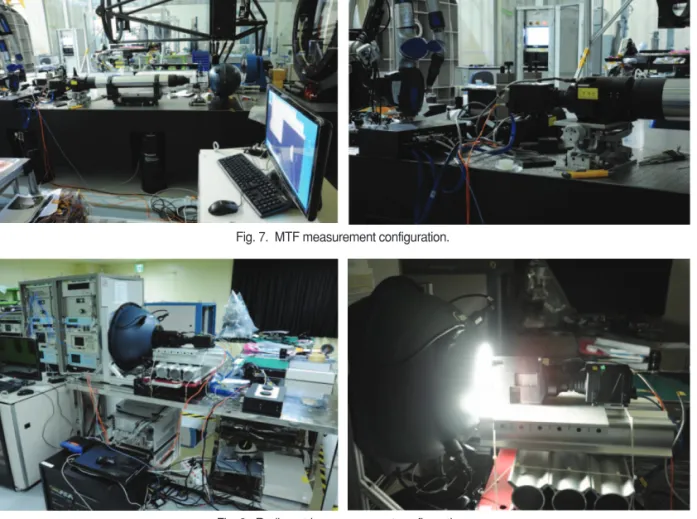
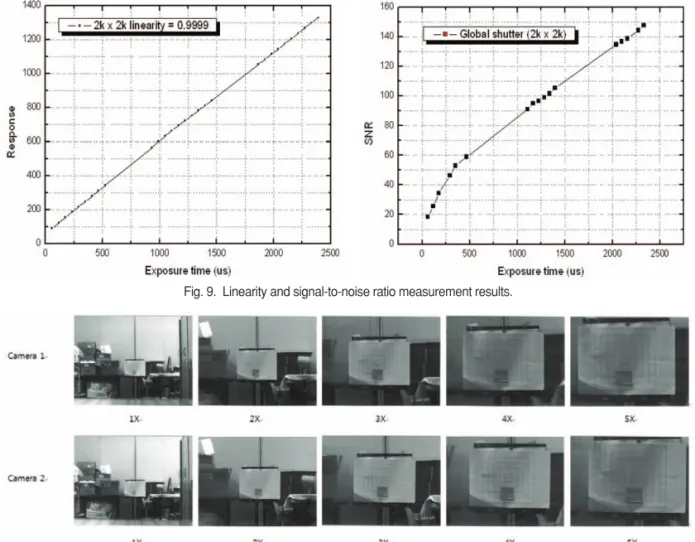
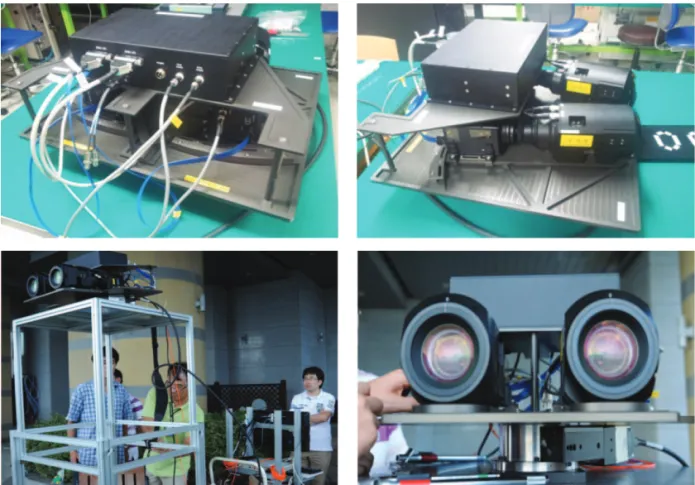
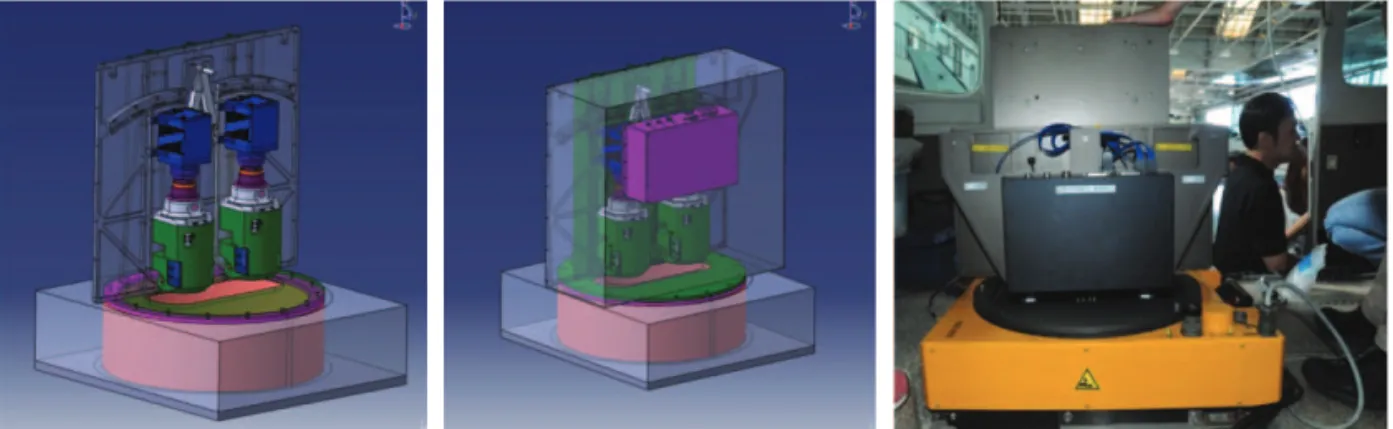
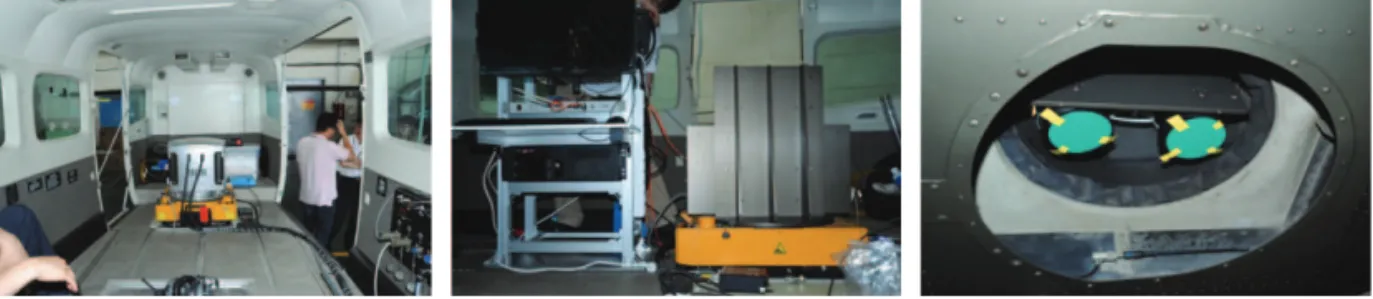
It should be light and small and should consume small power. In order to be used for national program of lunar exploration, electro-optical versatile camera system, called MAEPLE (Multi-Application Electro-Optical Payload for Lunar Exploration), has been designed after the derivation of camera system requirements. A ground model of the camera system has been manufactured to identify and secure relevant key technologies. The ground model was mounted on an aircraft and checked if the basic design concept would be valid and versatile functions implemented on the camera system would worked properly. In this paper, results of design and functional test performed with the field campaigns and air-born imaging are introduced.
Key Words : Lunar Exploration, Stereo Camera, Zoom, Field Campaign, Air-borne Imaging
Received October 10, 2012; Revised November 13, 2012, Revised December 4, 2012; Accepted December 5, 2012.
†