1. 서 론
최근 들어, UAV(unmanned aerial vehicle) 및 드론 (drone)에 기반을 둔 활용기술에 대한 다양한 연구들이 이루어지고 있다. 특히, 측량분야에서는 UAV에 탑재 된 디지털 카메라나 다양한 센서들을 이용하여 취득된 고해상도의 영상자료를 바탕으로 해당 지형을 분석하 거나, 고해상도의 정사영상 및 DSM(digital surface model)을 생성하는 기술에 대한 연구들이 수행되고 있다.
그러나, UAV를 이용한 측량기법은 현재 작업규정이 명확하게 정의되어 있지 않기 때문에, 최근의 연구들은 UAV를 이용한 활용의 적용가능 여부에 대한 선행 연 구의 성격을 가진다. Jung et al.(2010)은 무인항공 사 진측량을 이용하여 3차원 공간정보를 취득하고 수치지 도 수시갱신의 활용 가능성을 연구하였으며, Lee et al.(2013)는 고정익 무인항공기에 의한 정사영상을 제 작하고 지상측량에 의한 편차를 산출하여 정확도를 평 가하였다. Lee et al.(2015)은 UAV 영상을 활용한 수
Received: 2016.01.28, revised: 2016.04.12, accepted: 2016.05.09
* ㈜한국종합건설 과장(Hankook Constructio Co., LTD, Manager, [email protected])
** 교신저자ㆍ정회원ㆍ충북대학교 토목공학부 부교수(Corresponding Author, Member, Associate Professor, School of Civil Engineering, Chungbuk National University, [email protected])
*** 정회원ㆍ충북대학교 토목공학부 교수(Member, Professor, School of Civil Engineering, Chungbuk National University, [email protected])
**** 정회원ㆍ충북대학교 토목공학부 겸임교수(Member, Adjunct Professor, School of Civil Engineering, Chungbuk National University, [email protected])
중복도와 지상기준점에 따른 고정익 UAV 기반 정사영상 및 DSM의 품질 평가
Quality Evaluation of Orthoimage and DSM Based on Fixed-Wing UAV Corresponding to Overlap and GCPs
1)
유용호*ㆍ최재완**ㆍ최석근***ㆍ정성혁****
Yoo, Yong HoㆍChoi, Jae WanㆍChoi, Seok KeunㆍJung, Sung Heuk
要 旨
UAV(unmanned aerial vehicle)은 적은 비용으로 고해상도 정사영상과 DSM(digital surface model)을 빠르게 생성할 수 있다. 그러나, UAV에 의하여 획득된 정사영상과 DSM의 수직 및 수평위치 정확도는 영상처리 기술, 항공사진 의 품질, GCPs(ground control points)의 개수와 위치, 촬영경로 상의 중복도에 영향을 받는다. 본 연구에서는, 정사 영상과 DSM의 생성에 있어 중복도와 GCP의 개수가 미치는 영향을 분석하고자 하였다. 위치정확도는 9쌍의 자료 를 이용한 RMSE(root mean square error)을 기반으로 평가하였다. 실험결과, GCP의 개수와 중복도는 수평위치 및 수직위치 정확도에 영향을 미치는 것을 확인하였다.
핵심용어 : 위치정확도, 정사영상, 중복도, DSM, GCP, UAV
Abstract
UAV(unmanned aerial vehicle) can quickly produce orthoimage with high-spatial resolution and DSM(digital surface model) at low cost. However, vertical and horizontal positioning accuracy of orthoimage and DSM, which are obtained by UAV, are influenced by image processing techniques, quality of aerial photo, the number and position of GCPs(ground control points) and overlap in flight plan. In this study, effects of overlap and the number of GCPs are analyzed in orthoimage and DSM. Positioning accuracy are estimated based on RMSE(root mean square error) by using dataset of nine pairs. In the experiments, Overlaps and the number of GCPs have influence on horizontal and vertical accuracy of orthoimage and DSM.
Keywords : Positioning Accuracy, Orthoimage, Overlaps, DSM, GCP, UAV
3 Vol.24 No.3 September 2016 pp.3-9
연구논문
ISSN: 2287-6693(Online) http://dx.doi.org/10.7319/kogsis.2016.24.3.003
술적, 법·제도 규정 및 동향을 분석하였다. 또한, Lim et al.(2015)은 무인항공사진측량을 통하여 수치지도 갱신 에 활용할 수 있는지에 대한 정량적인 분석을 수행하였 으며, Cho et al.(2015)는 드론을 활용하여 토목 시공현 장에 대한 3차원 현장정보를 생성하고 관리할 수 있는 방안을 제시하였다. Zhang et al.(2015)은 UAV를 통하 여 취득된 정사영상과 DSM을 활용하여 고해상도의 토 지피복지도를 생성하기 위한 기법을 제안하였으며, Feng et al.(2015)는 UAV 영상에 RF(random forest) 기법과 질감분석(texture analysis)을 적용하여 도심지 내의 식생지도를 생성하기 위한 기법을 개발하였다.
UAV를 이용한 측량기법과 연관된 많은 연구들은 취 득된 항공영상을 활용하여 인공구조물 및 지형의 변위 를 측정하거나, 고해상도의 주제도를 취득하기 위한 기 법들에 대한 분석을 수행하였다. 하지만, UAV를 기반으 로 하는 사진측량에 의하여 생성된 공간정보의 품질은 촬영중복도(overlaps), 대상지역의 특성, 지상기준점의 수, 측점자료(point cloud) 추출을 위한 영상처리의 방법 에 따라서 결정될 수 있기 때문에, 촬영계획 수립 및 항 공사진 촬영을 위한 변수들의 영향 분석에 대한 연구는 UAV를 이용한 측량분야의 활용에 있어서 우선적으로 이루어져야 하는 부분이라고 할 수 있다(Lee, 2015).
본 논문에서는 UAV 기반의 항공영상을 이용하여 정 사영상과 DSM을 제작함에 있어서 중복도와 지상기준 점의 개수가 정사영상과 DSM의 품질에 미치는 영향을 분석하고자 하였다. 이를 위하여 스위스 senseFly 사에 서 개발한 대표적인 측량용 고정익 UAV인 eBee를 이 용하여 동일한 공간해상도 및 촬영고도의 조건으로 종 중복도와 횡중복도만을 변경한 촬영계획을 수립하고, 실제 항공촬영을 통하여 실험영상을 취득하였다. 중복 도와 지상기준점의 개수에 따라 각각 생성된 정사영상 및 DSM의 위치정확도를 계산하고, 국내의 관련 작업 규정에서 제시된 정확도와의 비교평가를 통하여 UAV 를 통한 항공영상의 기존 측량성과물에 대한 대체 가능 성을 검증하고자 하였다.
2. 연구 지역 및 자료
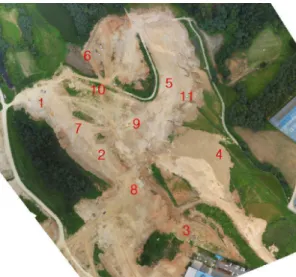
중복도 및 지상기준점 개수에 따른 UAV에 의한 정 사영상 및 DSM의 위치정확도를 평가하기 위하여 본 연구에서는 충청북도 진천에 위치한 광혜원 농공단지 부지 내를 실험지역으로 선정하였다. 연구 지역에 대한 현황도는 Fig. 1과 같다.
Figure 1. Study area and location of GCPs
No. X Y Z
1 237865.455 484732.011 104.552
2 237953.667 484658.072 104.463
3 238079.798 484550.505 104.474
4 238125.195 484662.146 96.533
5 238049.651 484764.470 102.609
6 237930.591 484801.243 107.780
7 237919.207 484695.522 105.279
8 238002.550 484608.606 104.784
9 238004.242 484704.065 102.613
10 237946.543 484752.524 103.722 11 238076.559 484745.973 101.959 Table 1. Coordinates of GCPs
위치정확도 평가를 위하여 연구 지역 내 총 11개의 GCPs(ground control points)를 설치하고, GPS(global positioning system) 장비를 이용하여 기준점에 대한 좌표를 측정하였다. GCPs의 위치는 Figure 1에 표시하 였으며, GPS 측량은 실시간 동적관측기법(virtual reference system by real-time kinematic : VRS-RTK) 으로 측정된 측점 별 좌표는 Table 1과 같다(정확도:
수평방향 8mm+1ppm). GCPs의 좌표는 세계측지계 기 준에 따라 중부원점의 평면직각좌표계를 적용하였다.
실험에 사용한 UAV는 대표적인 고정익(fixed wing) UAV인 스위스 SenseFly 사의 eBee를 사용하였다 (SenseFly Company, 2016a). eBee의 제원은 Fig. 2, Table 2와 같다.
Figure 2. SenseFly’s eBee
weight 0.69kg
wingspan 96cm
maximum flight time 50 minutes
maximum coverage 12㎢
wind resistance up to 45㎞/h Table 2. Specifications of eBee
3. UAV를 이용한 정사영상 및 DSM 제작
본 연구의 목적은 UAV를 이용하여 생성된 정사영상 과 DSM이 촬영계획의 중복도와 지상기준점의 개수에 따라서 어떠한 위치정확도를 나타내는지 평가하기 위 함이다. 이를 위해, 동일 촬영지역에 대하여 총 3종류 의 촬영계획을 수립하고, 취득자료별 지상기준점의 변 화에 따른 위치정확도를 분석하였다.
3.1 촬영계획의 수립
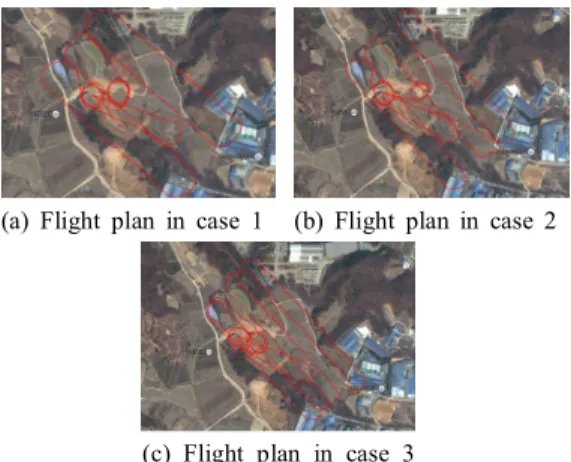
실험은 2015년 8월 10일에 수행되었으며, RGB 밴 드를 가지고 있는 Cannon IXUS127HS 카메라를 eBee 에 장착하여 실험지역 내 약 0.2㎢의 지형에 대한 촬영 을 수행하였다. 촬영시 종중복도에 의한 영향을 분석하 기 위하여 Table 3과 같이 세 종류의 중복도로 항공촬 영을 진행하였으며, 촬영경로에 따라서 20~43매의 영 상을 취득하였다.
date 2015.08.10
camera Canno IXUS127HS
spatial resolution 5㎝
flight height 160m
overlaps and the number of photos
obtained
case 1 overlap : 50%
sidelap : 60%
photos : 20 case 2 overlap : 60%
sidelap : 70%
photos : 30 case 3 overlap : 70%
sidelap : 80%
photos : 43 Table 3. Specifications of flight plan
(a) Flight plan in case 1 (b) Flight plan in case 2
(c) Flight plan in case 3
Figure 3. Flight plan corresponding to overlaps
Fig. 3은 각 실험조건별 촬영경로를 나타낸다. UAV 를 이용한 항공촬영의 경우에는 상대적으로 저가의 GPS/IMU 장비를 사용하며, 바람의 영향이 크기 때문 에 낮은 중복도를 기준으로 항공사진을 촬영할 경우에 는 정사영상 및 DSM의 오차가 매우 증가될 수 있기 때문에, 본 연구에서는 편의상 횡중복도 60%를 기준으 로 하여 실험을 설계하였다.
3.2 번들 조정의 수행
모자익(mosaic)된 정사영상과 DSM을 생성하기 위 해서는 촬영지역에 대한 3차원 측점자료가 필요하다.
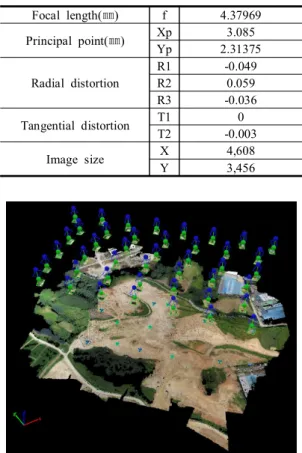
이를 위하여, 각 촬영계획별로 취득된 영상에 대하여 항공삼각측량(aerial triangulation)인 번들 조정(bundle adjustment)을 수행하였다. 이를 위하여, eBee UAV 시스템 구축과정에서 사전에 정의된 카메라 검정결과 자료인 내부표정요소를 활용하여 촬영된 영상 내에 포 함되어 있는 렌즈왜곡을 제거하고, 취득된 영상의 사진 좌표계를 변환하였다. Table 4는 실험에 사용된 카메라 검정결과를 정리한 표이다. 왜곡이 보정된 항공사진과 UAV 시스템에 탑재된 GPS 및 IMU(inertial measurement unit)에 의하여 취득된 촬영당시의 외부표정요소를 이 용하여 촬영영상의 초기 위치를 설정하였다. 초기 외부 표정요소를 기반으로 하여 영상 내의 동일한 정합점 (matching points)들을 자동으로 추출하고, 추출된 정 합점들에 번들조정을 적용하여 영상좌표들을 지상좌표 로 변환하였다.
본 논문에서는 Postflight Terra 3D 소프트웨어를 이 용하여 번들조정을 자동으로 수행하였으며, 번들 조정 과정에서 입력하는 GCPs의 개수를 조정하여 지상기준 점이 위치정확도에 미치는 영향을 분석하였다(SenseFly Company, 2016b). 최종적으로 영상의 기하학적 위치
Principal point(㎜) Xp 3.085
Yp 2.31375
Radial distortion
R1 -0.049
R2 0.059
R3 -0.036
Tangential distortion T1 0
T2 -0.003
Image size X 4,608
Y 3,456
Figure 4. Result of point clouds extraction
를 역추적하여 촬영영상을 기반으로 해당 지형 내의 3 차원 위치좌표정보를 가지는 고밀도의 측점자료를 취 득하였으며, 이는 Fig. 4와 같다.
3.3 정사영상 및 DSM의 제작
추출된 측점자료를 활용하여 기복변위가 제거된 정 사영상과 DSM을 제작하였다. 특히, DSM을 생성하기 위해서는 벡터자료인 측점자료를 격자화하는 것이 필요 하며, 이를 위해서는 TIN(triangulated irregular network), 역거리 가중치(inverse distance weighting) 기법 등과 같은 보간법을 활용하는 것이 일반적이다. 본 연구에서 는 상대적으로 측점자료의 밀도가 높기 때문에 측점자 료에 영향이 큰 역거리 가중치 기법을 활용하였으며, 격자화 과정에서 발생할 수 있는 잡음(noise)정보를 최 소화하기 위하여 잡음 필터링(noise filtering) 및 평활 화(surface smoothing) 과정을 추가적으로 적용하였다.
Fig. 5는 지상기준점 3개를 이용하여 종중복도 50%, 횡중복도 60%으로 촬영된 영상을 이용하여 최종적으 로 생성된 정사영상과 DSM의 예이다.
(a) Orthophoto (b) DSM
Figure 5. Example of orthophoto and DSM by automatic bundle adjustment
4. 중복도 및 GCP 개수에 따른 위치정확도 평가
4.1 평가 방법의 설정
본 연구에서 고정익 UAV를 통하여 취득된 정사영상 및 DSM의 위치정확도를 평가하기 위한 국내의 규정은 현재 존재하지 않는 실정이다. 따라서, 본 연구에서는 Lee(2015)의 연구사례를 참고하여 국토지리정보원의 항공사진측량 작업규정과 항공레이저 작업규정에 명시 된 위치오차의 한계를 이용하여 중복도 및 지상기준점 의 개수에 따른 정사영상과 DSM의 위치정확도를 평가 하고자 하였다. 첫 번째로, 생성된 정사영상과 DSM의 평면위치와 수직위치에 대한 오차가 일반 항공사진측량 에 따른 도화축척별 평면기준점 및 표고기준점의 한계 를 만족하는지를 Table 5의 항공사진측량 작업규정을 이용하여 비교하였다(National Geographic Information Institute, 2012a).
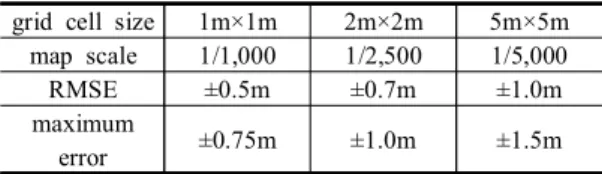
한편, 생성된 DSM자료는 항공레이저측량에 의하여 격자자료로 작성되는 수치표고모델 규격과도 비교하였 다. 항공레이저측량 작업규정에서 수치표고모델의 격 자 규격에 따른 평면위치 정확도는 H(비행고도)/1,000 로 정의하며, 수직위치 정확도는 Table 5와 같이 정의 된다(National Geographic Information Institute, 2012b).
본 연구에서는 항공레이저측량에 의한 격자자료의 규 격에 따른 정확도와의 비교분석을 시행하였다. 최종적
Map scale horizontal accuracy
vertical accuracy 1/500∼1/600
1/1,000∼1/1,200 1/2,500∼1/3,000 1/5,000∼1/6,000
1/10,000
±0.10m
±0.10m
±0.20m
±0.20m
±0.50m
±0.05m
±0.10m
±0.15m
±0.20m
±0.30m Table 5. Working rules of aerial photogrammetry
(National Geographic Information Institute, 2012a)
grid cell size 1m×1m 2m×2m 5m×5m map scale 1/1,000 1/2,500 1/5,000
RMSE ±0.5m ±0.7m ±1.0m
maximum
error ±0.75m ±1.0m ±1.5m
Table 6. Working rules of airborne laser scanning (National Geographic Information Institute, 2012b)
overlap : 50%
sidelap : 60%
overlap : 60%
sidelap : 70%
overlap : 70%
sidelap : 80%
none case 1-1 case 2-1 case 3-1 3 GCPs case 1-2 case 2-2 case 3-2 6 GCPs case 1-3 case 2-3 case 3-3 Table 7. Experimental case according to overlaps and
the number of GCPs
으로, 지상기준점과 중복도의 특성에 따른 다음의 실험 결과들을 위의 작업규정들과 비교하였다. 실험결과를 중복도 및 지상기준점의 특성에 따라서 구분한 결과는 Table 7과 같다.
첫째, GCP를 사용하지 않고 중복도 별 생성된 정사 영상과 DSM에 대하여 5개의 검사점(7~11번째의 GCPs)으로 정확도를 평가하였다(case 1-1, case 2-1, case 3-1). 둘째, 3개의 GCP를 이용하여 생성된 중복도 별 정사영상과 DSM에 대하여 5개의 검사점으로 정확 도를 평가하였다(case 1-2, case 2-2, case 3-2). 특히, DSM과 정사영상의 생성을 위하여, 실험 지역의 외곽 에 위치한 1, 3, 5번째의 GCPs(Fig. 1, Table 1 참조)를 사용하여, 실험결과가 지상기준점의 분포에 미치는 영 향을 최소화하고자 하였다. 셋째, 6개의 GCP를 이용하 여 종중복도 50%, 횡중복도 60%일 때(case 1-3), 종중 복도 60%, 횡중복도 70%일 때(case 2-3), 종중복도 70%, 횡중복도 80%일 때(case 3-3)로 생성된 정사영 상과 DSM에 대하여 5개의 검사점으로 정확도를 평가 하였다. 6개의 지상기준점은 실험지역의 외곽에 위치한 Table 1과 Fig.1의 1~6번째 GCPs를 사용하였다.
4.2 GCP를 사용하지 않은 경우의 중복도 별 위 치정확도 평가
GCP를 사용하지 않은 경우는 항공촬영시 UAV에 부착되어 있는 GPS만을 이용하여 정사영상과 DSM의 좌표를 생성한 경우를 의미한다. 중복도에 따른 위치정 확도 평가에 있어서, 각 실험마다 동일한 검사점을 사 용하기 위하여 총 5점의 검사점(7~11번째의 GCPs)을
horizontal accuracy
case 1-1 1.724m
case 2-1 1.336m
case 3-1 0.904m
Table 8. Positioning accuracy when GCPs are not used in the process
대상으로 하여 RMSE(root mean square error)를 계산 하였다. RMSE 평가는 Table 7과 같으며, 수직위치정 확도의 경우에는 UAV만을 이용하여 생성된 표고값과 GCP 사이에 20m이상의 차이가 발생하였기 때문에, 평 가에서 배제하였다. Table 8에서 확인할 수 있는 것과 같이, 촬영 중복도에 따른 평면위치 정확도 RMSE는 1.724m, 1.336m, 0.904m로, 모든 경우에 대하여 항공 사진측량의 작업규정을 만족하는 위치정확도를 확보할 수 없었다.
4.3 3개의 GCP를 사용한 경우의 중복도 별 위치 정확도 평가
3개의 GCP를 이용하여 정사영상과 DSM을 생성하 고, GCP를 사용하지 않은 경우와 마찬가지로 5개의 검 사점을 이용하여 RMSE를 계산한 결과는 Table 9와 같다. 종중복도 50%, 횡중복도 60%에서는 평면기준점 편차 0.046m, 표고기준점 편차 0.189m 로 도화축척 1/5,000∼1/6,000의 평면기준점, 표고기준점 표준편차 허용범위에 포함되었다. 종중복도 60%, 횡중복도 70%
와 종중복도 70%, 횡중복도 80%에서는 각각 평면기준 점 편차 0.054m, 표고기준점 편차 0.114m 와 평면기준 점 편차 0.045m, 표고기준점 편차 0.095m로 도화축척 1/2,500∼1/3,000의 평면기준점, 표고기준점 표준편차 허용범위에 포함되었다. 항공사진측량의 1:1,000 축척 이상의 영상의 정확도를 기준으로 평가였을 때, 생성된 정사영상과 DSM은 평면기준점의 표준편차(±0.10m)는 만족하지만, 표고기준점 표준편차 ±0.10m를 벗어나는 것을 확인하였다. 또한, 평면에 대한 위치정확도는 중 복도에 크게 영향을 받지 않지만, 높이정확도의 경우에 는 중복도의 영향을 크게 받는 것으로 나타났다. 한편, 항공레이저측량 작업규정을 기준으로, 3개의 GCP를
horizontal accuracy vertical accuracy
case 1-2 0.046m 0.189m
case 2-2 0.054m 0.114m
case 3-2 0.045m 0.095m
Table 9. Positioning accuracy when three GCPs are used in the process
horizontal accuracy vertical accuracy
case 1-3 0.040m 0.154m
case 2-3 0.046m 0.123m
case 3-3 0.040m 0.064m
이용한 실험결과는 격자 1m×1m인 수치지도축척 1/1,000인 모델로 활용할 수 있음을 알 수 있다.
4.4 6개의 GCP를 사용한 경우의 중복도 별 위치 정확도 평가
4.2 및 4.3의 실험과 동일하게 5개의 GCP를 이용하 여 실험을 수행한 결과는 Table 10과 같다.
종중복도 50%, 횡중복도 60%에서는 평면기준점 편 차 0.040m, 표고기준점 편차 0.154m 로 도화축척 1/5,000∼1/6,000의 평면기준점, 표고기준점 표준편차 허용범위에 포함되었으며, 종중복도 60%, 횡중복도 70%에서는 평면기준점 편차 0.046m, 표고기준점 편차 0.123m 로 도화축척 1/2,500∼ 1/3,000의 평면기준점, 표고기준점 표준편차 허용범위에 포함되었다. 또한 종 중복도 70%, 횡중복도 80%에서는 각각 평면기준점 편 차 0.040m, 표고기준점 편차 0.064m 도화축척 1/1,000
∼1/1,200의 평면기준점, 표고기준점 표준편차 허용범 위에 포함되었다. 또한, 6개의 GCP를 이용하여 생성된 정사영상 및 DSM은 결과평면위치 및 수직위치 정확도 모두 항공레이저측량 작업규정의 수직위치 정확도 격 자 1m×1m인 수치지도축척 1/1,000의 RMSE 0.5m 이 내를 모두 만족하는 것으로 분석되었다. 결과적으로, 3 개의 지상기준점을 사용하였을 때의 생성결과와 비교 하여 표고정확도가 증가되는 것을 확인하였다. 따라서, 평면에 대한 위치정확도는 중복도에 크게 영향을 받지 않지만, 높이정확도의 경우에는 중복도의 영향을 받는 다고 할 수 있다.
5. 결 론
본 연구에서는 UAV를 이용한 항공사진측량에 있어 서, 중복도와 지상기준점의 개수가 정사영상 및 DSM 의 정확도에 미치는 영향을 분석하고자 하였다. 실험 결과, 지상기준점을 사용한 경우에는 지상기준점의 개 수에 따른 평면위치정확도의 편차는 큰 차이가 없지만, 높이정확도의 편차는 지상기준점의 수가 많을수록 감 소하는 것을 확인하였다. 또한, 중복도의 경우, 지상기
준점을 적용한 경우에는 평면위치 정확도편차는 큰 차 이가 없지만, 높이정확도편차는 중복도가 증가할수록 편차가 감소하는 경향을 나타내었다. 특히, 3개의 지상 기준점과 종중복도 50%, 횡중복도 60% 이상의 조건에 의하여 생성된 정사영상 및 DSM은 항공레이저측량 작 업규정의 수치지도축척 1:1,000의 자료로 활용가능하 고, 6개의 지상기준점과 종중복도 70%, 횡중복도 80%
의 조건에 의하여 생성된 정사영상과 DSM은 항공사진 측량 도화축척 1:1,000이상의 자료로 활용 가능하였다.
따라서, 중복도 및 지상기준점 수에 따른 위치정확도는 상이할 수 있으며, UAV의 활용분야 및 지형의 특성, 축척 등에 따라서 중복도 및 지상기준점 수를 고려한 촬영계획이 수립되어져야 할 것으로 판단된다. 한편, 본 연구에서는 RMSE 평가를 위하여 총 5개의 검사점 을 활용하였는데, 본 연구의 결과의 신뢰성 확보를 위 하여 추가적인 검사점들을 확보한 복잡한 지형에 대한 추가적인 실험이 필요할 것으로 사료된다.
감사의 글
본 연구는 2015년도 정부(미래창조과학부)의 제원으 로 한국연구재단의 지원을 받아 수행되었습니다(NRF- 2013R1A1A1060343).
References
1. Cho, Y. S., Lim, N. Y., Joung, W. S., Jung, S. H.
and Choi, S. K., 2014, Management of construction fields information using low altitude close-range aerial images, Journal of the Korean Society of Surveying, Geodesy, Photogrammetry and Cartography, Vol. 32, No. 5, pp. 551-560.
2. Feng, Q., Liu, J. and Gong, J., 2015, UAV remote sensing for urban vegetation mapping using random forest and texture analysis, Remote Sensing, Vol. 7, No. 1, pp. 1074-1094.
3. Jung, S., Lim, H. and Lee, J., 2010, Acquisition of 3D spatial information using UAV photogrammetirc method, Journal of the Korean Society of Surveying, Geodesy, Photogrammetry and Cartography, Vol.
28, No. 1, pp. 161-168.
4. Lee, I. S., Lee J. O., Kim, S. J. and Hong, S. H., 2013, Orthophoto accuracy assessment of ultra-light fixed wing UAV photogrammetry techniques, Journal
of the Korean Society of Civil engineers, Vol. 33, No.
6, pp. 2593-2600.
5. Lee, Y. C., 2015, Assessing the positioning accuracy of high density point clouds produced from rotary wing quadrocopter unmanned aerial system based imagery, Journal of the Korean Society for Geospatial Information Science, Vol. 23, No. 2, pp.
39-48.
6. Lim, S. B., Seo, C. W. and Yun, H. C., 2015, Digital map updates with UAV photogrammetric methods, Journal of the Korean Society of Surveying, Geodesy, Photogrammetry and Cartography, Vol.
33, No. 5, pp. 397-405.
7. National Geographic Information Institute, 2012a, Working rules of aerial photogrammetry (in Korean) 8. National Geographic Information Institute, 2012b,
Working rules of airborne laser scanner (in Korean)
9. SenseFly Company, 2016a, eBee: senseFly SA, https://www.sensefly.co m/drones/ ebee.html 10. SenseFly Company, 2016b, Postflight Terra 3D
Professional photogrammetry software: senseFly SA, https://www. sensefly.com/drones/postflight-terra-3d.
html
11. Yun, B. Y. and Lee J. O., 2014, A study on application of the UAV in Korea for integrated operation with spatial information, Journal of the Korean Society for Geospatial Information System, Vol. 22, No. 2, pp. 3-9.
12. Zhang, Q., Qin, R., Huang, X., Fang, Y. and Liu, L., 2015, Classification of ultra-high resolution orthophotos combined with DSM using a dual morphological top hat profile, Remote Sensing, Vol.
7, No. 12, pp. 16422-16440.