https://doi.org/10.7848/ksgpc.2018.36.2.75
도로시설물 계측을 위한 MEMS-INS 기반 모바일매핑시스템(MMS) 개발
Mobile Mapping System Development Based on MEMS-INS for
Measurement of Road Facility
이계동1)·정성혁2)·이기형3)·최윤수4)·김만식5)
Lee, Kye Dong · Jung, Sung Heuk · Lee, Ki Hyung · Choi, Yun Soo · Kim, Man Sik
Abstract
The purpose of this study is that the low-cost mobile mapping system using INS (Inertial Navigation System) based on MEMS (Micro Electro Mechanical System) could decipher the interpretation of road facility with the accuracy of x, y 0.546m plane error. Even though the MMS (Mobile Mapping System) technology as a new measurement technology has been used vividly to set up geographic information by some world leading surveying equipment manufacturers, the domestic technology is still in its beginning stage. Several domestic institutes and companies tried to catch up the leading technology but they just produced prototypes which needs more stabilization. Through this thesis, we developed low-cost mobile mapping system installed with INS based on MEMS after time synchronizing sensors for MMS such as LiDAR (Light Detection And Ranging), CCD (Charge Coupled Device), GPS/INS (Global Positioning System / Inertial Navigation System) and DMI (Distance Measurement Instrument).
Keywords : Mobile Mapping System, Sensor Integration, Micro Electro Mechanical System, Light Detection And Ranging
초 록
본 연구의 목적은 MEMS 기반의 INS를 적용한 저가형 MMS를 개발하고, 개발된 MMS를 이용하여 x, y의 평면 거리오차가 0.546m인 정확도를 확보하여 도로시설물의 판독에 활용하고자 함에 있다. MMS 기술은 해외 유수의 측량장비제작 업체를 중심으로 지리정보 구축을 위한 새로운 측량기술로 활발하게 사용되고 있지만 국내에서는 아직 관련 연구가 초기단계에 있다. 또한, MMS 장비개발은 몇몇 연구원 및 업체에서 시도를 하였으나 안정화가 이 루어지지 않은 시작품 단계에 불과하다. 이러한 MMS 기술은 빠른 시간 내에 지형·지물 데이터를 취득할 수 있어 정 밀지도 제작과 도로시설물 데이터 취득에 활용되고 있다. 따라서 본 연구에서는 MMS 제작에 사용하는 각종 센서 (LiDAR, CCD camera, GPS/INS, DMI 등)를 동기화하여 MEMS 기반의 INS를 탑재한 저가형 MMS를 개발하고 자 한다.
핵심어 : 모바일매핑시스템, 센서융합, 미세전자제어기술, 라이다
Original article
Received 2018. 03. 23, Revised 2018. 04. 10, Accepted 2018. 04. 17 1) Corresponding Author, Member, C2L (E-mail: [email protected]) 2) Member, Terapix (E-mail: [email protected])
3) Member, C2L (E-mail: [email protected])
4) Member, Dept. of Geoinformatics, University of Seoul (E-mail: [email protected])
5) Member, Dept. of Urban Construction Engineering, Shinsung University (E-mail: [email protected])
1. 서 론
최근 각종 센서 종류의 정확도 향상과 소형화로 인하여 드 론이나 자동차를 이용한 데이터 취득이 활발히 이루어지고 있 다. 특히 차량용 모바일매핑시스템(Mobile Mapping System, MMS)의 경우 최근 이슈화되고 있는 자율주행자동차의 정밀 지도제작과 각종 도로시설물 측량에 사용함으로써 많은 관심 을 받고 있다. 차량 MMS 기술은 변화가 발생한 지역에 접근하 기가 용이하며, 빠른 시간 내에 현장에서 데이터를 획득하고 처 리하여 지리정보 데이터를 취득할 수 있는 특징을 가지고 있다.
이러한 특징은 차량 MMS가 정밀지도 제작 및 도로시설물 데 이터 취득에 적합함을 말해주고 있다(Song et al., 2012).
MMS 기술은 해외 유수의 측량장비 제작업체를 중심으로 지리정보 구축을 위한 새로운 측량기술로 활발하게 사용되고 있지만 국내에서는 아직 관련 연구가 초기단계에 있으며, 기 술개발은 몇몇 연구원 및 업체에서 시도를 하였으나 안정화가 이루어지지 않은 시작품 단계에 불과하다.
현재 서울특별시, 부산광역시, 청주시, 시흥시 등에서는 교 통안전시설물 관리시스템(Traffic Geographic Information System, TGIS)을 구축하여 도로시설물에 대한 관리를 수행하 고 있다. 이들 도시뿐만 아니라 여러 지자체에서 도로시설물의 유지관리 수요가 증가하고 있는 추세이며, 효율적인 유지관리 를 필요로 하고 있다. 그러나 최근 MMS의 관심이 높아지고 사 용이 증가되고 있는 추세임에도 고가의 외산 장비를 구입해야 만 MMS관련 사업을 수행할 수 있는 실정이므로 도로시설물 판독을 위한 저가의 국산 장비 개발이 시급한 실정이다.
따라서 본 연구에서는 자율주행을 위한 정밀지도제작과 같은 고정밀 데이터 취득을 위한 MMS 장비가 아닌 도로시 설물과 같은 시설물들의 공간정보 데이터 구축에 적합하도 록 MEMS (Micro Electro Mechanical Systems) 기반의 INS (Inertial Navigation System)를 이용한 저가의 MMS를 개발 하고자하며 보다 많은 분야에서 활용할 수 있도록 하고자함 이 그 목적이다.
2. 연구방법
MMS에 관한 연구는 주로 취득한 자료의 정확도 검증, GPS (Global Positioning System) 수신불량지역에서의 정확도 확보 를 위한 보완방법, 항공측량 및 항공 LiDAR (Light Detection And Ranging)의 단점을 보완하기 위한 방법, 국가기본도 수정 을 위한 보완방법, 도로관련 분야에서의 활용방안에 대한 연 구 등이 많이 이루어지고 있다(Yu, 2015; Lee et al., 2010).
본 연구는 MEMS기반의 INS를 이용한 저가형 MMS장비 를 개발하고 이를 이용하여 도로시설물을 판독하기 위하여 수행하였다 . 본 연구를 위하여 국내·외적으로 MMS 제작에 사용하는 각종 센서(LiDAR, CCD (Charge Coupled Device) camera, GPS/INS, DMI (Distance Measurement Instrument) 등 )를 통하여 MEMS 기반의 INS를 탑재한 MMS를 개발하 였다 . 각종 센서들의 시각동기화를 거친 MMS장비는 캘리브 레이션을 통해 장비의 검증을 수행하고, 시설물 판독을 위하 여 서울시 강남구 일대를 테스트 베드로 선정하여 데이터를 수집하였다 . 관측데이터는 점군자료의 정합과정을 수행하 였으며 , 취득한 데이터에 대한 정확도 검증을 위하여 VRS (Virtual Reference Station) 및 토탈스테이션(total station, TS) 측량을 수행하였다. 정확도 검증을 거친 데이터를 이용 하여 점군데이터를 통합하는 작업을 수행하였으며, 이를 통 한 3D 모델링을 수행하였다. 본 연구에서 제작된 MEMS 기반 의 MMS장비는 저가형으로 국내의 도로시설물 관리를 위한 전수조사에 활용이 가능할 것으로 판단된다. Fig. 1은 본 연구 를 수행하기 위한 전반적인 흐름을 나타낸다.
3. 모바일매핑시스템 및 센서
3.1 모바일매핑시스템
모바일매핑시스템 측량이란 이동차량에 영상 시스템과 레이 저 스캐너, GNSS (Global Navigation Satellite System) 수신기, 관성항법장치 , 컴퓨터 등을 탑재하고 통합하여 지형·지물의 정
Fig. 1. Work flow
보를 취득하고 고품질의 공간정보 자료구축을 위해 항법기술 과 사진측량 및 영상처리기술을 채용하여 지상에서 실시간으 로 다양하고 복잡한 지형지물정보를 측정할 수 있는 시스템이 다 (Kim, 2009; Gang, 2013).
모바일매핑기술 (Mobile Mapping Technology, MMT)의 개 념은 기반이 되는 기술의 변화에 따라 변화해 왔다. 초기에는 이동체에 장착된 센서를 통하여 수집한 자료와 별도로 측량한 지상기준점을 이용하여 지형지물의 위치와 형상을 측정하는 개념으로 사용되었다(Hwang et al., 2015). 그러나 오늘날에는 GPS와 INS의 사용이 보편화되고 통합기술이 발달함에 따라 별도의 지상기준점을 사용하지 않고도 이동체에 장착된 센서 를 이용하여 수집한 자료만으로 3차원 위치측정을 수행할 수 있는 기술의 개념으로 사용하고 있다(Yun et al., 2010).
지상 MMS는 1991년 미국 오하이오 주립대학이 개발한 GPSVanTM 에서 TM은 윗 첨자을 시작으로 캐나다 캘거리 대 학의 VISAT (Video-SATellite-Inertial), 중국 우한 기술대학교의 WUMMS (Wuhan University Mobile Mapping System) 등 다양 한 시스템들이 개발되어 활용되고 있다(Kang, 2011; Lee, 2015).
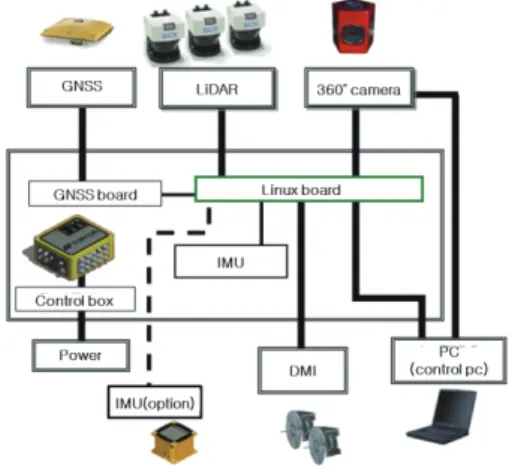
최근에 국내·외에서 개발되고 있는 MMS는 소형· 경량화 되 고 있고, 이동체에 탈부착을 쉽게 하기 위하여 모든 센서를 하 나의 시스템으로 통합되고 있는 추세이다. 본 연구에서 사용 한 MMS 각 센서의 시스템 구성은 Fig. 2와 같다(Jung, 2015).
3.2 LiDAR
LiDAR 측량 기술은 빛의 특성을 이용하여 대상물의 범위 와 거리에 대한 정보를 측정하는 기술로써 지형과 지물에 대 한 거리를 결정하기 위하여 레이저 펄스(laser pulse)를 사용
한다 . LiDAR측량 기술은 레이더(Radar) 기술과 비슷한 개념 이나 라디오 파장(radio wave)이 아닌 레이저 펄스를 지형·지 물에 주사하여 반사파가 돌아오는 시간차이를 측정함으로써 정확한 거리를 결정하는 방법이다(Kim, 2009; Kang, 2011).
라이다는 대상물에 레이저를 발사하고, 반사되는 레이저가 도달할 때까지의 시간을 측정한 후 빛의 속도를 곱함으로써 정밀한 거리를 계산하는 기술이며, 개요도는 Fig. 3과 같다.
레이저를 이용한 거리측정 방법에는 도달시간을 관측하기 위해 펄스를 이용한 방법과 위상차(phase shift)를 이용하는 방법이 있다. 위상차를 이용하는 방법에서는 연속적으로 발 사되는 레이저 광선(Continuous Wave, CW)을 이용하여 발 사된 위상과 반사된 위상의 차를 관측하여 거리를 계산하며, 펄스 방법과 CW방법의 원리는 Fig. 4와 같다.
현재 사용되고 있는 대부분의 라이다 장비에서는 펄스 방 법을 사용하고 있는데, 펄스 방법의 일반적인 측정 원리는 펄 스가 발사되고 수신되는 시각차를 이용하는 것으로 레이저 펄스의 왕복시간은 Eq. (1)을 이용하여 계산된다. 이때 거리측 정의 정밀도 ΔR은 시간측정의 정밀도 Δt
L에 정비례하며, 이 는 Eq. (2)로 표현된다.
(1)
where t
Lis time of a round trip, R is distance of scanner and target and c is velocity of light
Fig. 2. System composition of MMS
t
L=2 R c
Fig. 3. TOF (Tme of Flight)
Fig. 4. Principle of pulse ranging (a) and CW ranging (b)
(2) where ΔR is accuracy of pulse and Δt
Lis accuracy of time (3)
where t
riseis generation time of pulse, S is signal strength of photodiode electric current and N is thermal noise strength of photodiode and amplifier
거리의 정확도는 펄스의 생성시간(generation time), 신호잡 음비 (Signal to Noise Ratio, S/N ratio), 관측 비율 등에 의해 결정되며 , Eq. (3)과 같이 표현된다.
3.3 MEMS-INS
MMS의 위치 자세 값 획득을 위해 주로 사용되는 관성항 법시스템은 IMU (Inertial Measurement Unit)의 각도 해상력 에 따라 성능이 크게 좌우되며, 3개의 자이로 센서와 3개의 가 속도센서로 구성된다.
관성항법장치의 정확도를 좌우하는 자이로는 동작원리에 따라 크게 기계식 자이로, 광학식 자이로 그리고 마이크로 자 이로로 나눌 수 있다. 기계식 자이로는 회전하는 물체의 관성 과 세차운동(precession)을 이용하는 것이며, 광학식자이로는 사냑효과 (Sagnac effect)라는 회전 시 빛의 성질을 이용한 것 으로 RLG (Ring Laser Gyroscope)와 IFOG (interferometric Fiber Optic Gyroscope)가 있다. 마이크로 자이로는 최근에 개 발된 반도체 공정기술 기반의 MEMS 기술을 이용하여 자이로 를 수 mm 이하의 크기로 소형화 한 것이며, 진동자의 회전에 비례하는 코리올리 힘(Coriolis force)의 원리를 이용하고 있다.
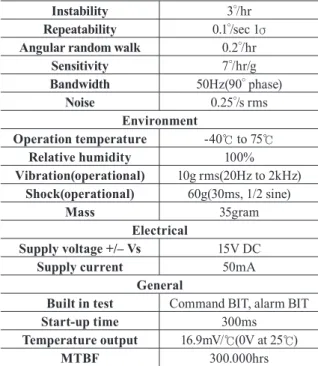
본 연구에서 사용한 MEMS 기반 IMU의 GYRO인 SiRRS01-01-0100의 주요 성능은 Table 1과 같다.
4. MEMS-INS 기반 MMS 개발
4.1 시스템 구성 및 센서 동기화
MEMS 기반의 INS를 사용한 소형모듈의 시스템 구성은 LiDAR 센서와 카메라, 항법장치, 좌표연산 및 데이터 저장용 계산 모듈로 구성된다. 항법장치, LiDAR 센서, 카메라 센서, 통신장치 등의 동기화 시스템 블록도는 Fig. 5와 같다.
모듈 개별 성능 측정을 통한 시스템 성능 평가의 경우 스캐 너는 캘리브레이션 타겟을 반복 측정하여 오차를 측정하였으 며 , 항법장치는 MEMS 기반의 INS로 제작하였다. 또한, 카메
Instability 3°/hr
Repeatability 0.1°/sec 1σ
Angular random walk 0.2°/hr
Sensitivity 7°/hr/g
Bandwidth 50Hz(90° phase)
Noise 0.25°/s rms
Environment
Operation temperature -40℃ to 75℃
Relative humidity 100%
Vibration(operational) 10g rms(20Hz to 2kHz) Shock(operational) 60g(30ms, 1/2 sine)
Mass 35gram
Electrical
Supply voltage +/– Vs 15V DC
Supply current 50mA
General
Built in test Command BIT, alarm BIT
Start-up time 300ms
Temperature output 16.9mV/℃(0V at 25℃)
MTBF 300.000hrs
Specification(typical data) RRS01-01 Rate range 110°/sec other rangers available see table
Scale factor
Nominal 18.2mV/°/s
Linearity ± 1% of full scale Variation with temperature ±3%
Repeatability ±0.1%1σ
Bias
Setting(@20℃) ± 0.3°/sec
Variation with temperature ±2°/sec Table 1. Specification of SiRRS01-01-0100
Fig. 5. System block diagram ΔR= cΔt 1
L2
라의 경우 렌즈 캘리브레이션과 해상도 수치를 통해 오차를 계산하였으며 , 시스템은 통합 후 캘리브레이션 타겟에 대한 오차를 재 측정하였다.
LiDAR 센서에서 획득된 x, y, z 값은 LiDAR의 위치와 자 세값에 기반한 상대값으로 이를 표준좌표계에 투영된 값으 로 변환하기 위해서는 LiDAR에서 데이터 수집 당시의 위치 와 자세값이 필요하다. 따라서 적당한 성능의 항법장치를 선 택하여 적용해야 한다. 본 연구에서는 OxTS사의 MEMS 기 반 INS를 선정하여 MMS를 제작하였다. MMS 항법 장치의 특성상 롤(roll), 피치(pitch) 값의 항법 오차 누적이 크므로 GNSS의 단절로 인해 장시간 보완작업이 이루어지지 않을 경 우 , 데이터의 정확도가 크게 떨어질 우려가 있다. 또한, 부정확 한 자세 값으로 인해 LiDAR 센서에서 멀리 떨어진 대상체의 경우 , 오차 값이 증가할 우려가 있다. Fig. 6은 본 연구에서 사 용한 MEMS기반의 INS장치이다.
LiDAR센서 선정 시 고려사항으로, MMS는 데이터 수집 대상체와 일정 거리 이상에서 대상에 대한 거리 및 각도 데이 터를 취득하므로 충분히 빠른 속도의 데이터 스캔속도를 지 녀야한다 . 또한 항법장치 데이터와 후처리 연산을 위한 동기 화보드와 연동 가능한 포트 및 프로토콜을 가지고 있어야 한 다. 본 연구에서는 SICK사의 LMS시리즈를 적용하여 MMS 를 제작하였다.
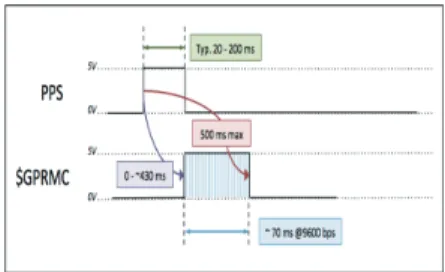
LiDAR 센서 인터페이스에서 Ethernet의 경우 일반적인 10Mbps 인터페이스를 사용하며 트위스트 되어 있는 4개의 심 선을 사용한다. RS-232의 경우는 NMEA (National Marine Electronics Association) 신호를 통한 동기화를 위한 RS-232 Receive data 라인과 PPS (Pulse Per Second) 신호를 가지고 있다.
본 연구의 INS에서 나오는 PPS와 NMEA 신호 주기는 Fig.
7과 같다. NMEA 메시지는 스트링으로 구현되어 있어 신호 생성 시점을 정확히 알 수 없다.
항법 장치와 센서간의 정확한 동기화를 위해 PPS신호를 사 용하여 동기화 장치의 고정밀 타이머에 시간을 세팅하였으며, 그 절차는 Fig. 8과 같다. 항법 장치 내부의 이벤트를 사용하
지 않은 점은 SICK 특성상 시간에 동기화하여 인코더 카운트 를 증가 시켜야 하고 INS 내부의 타이머는 GPS 단절구간에 서 정확도가 떨어지는 문제가 있으며, 이벤트 포트가 수용할 수 있는 신호에 한계가 있어 별도의 동기화 장치 내부 타이머 를 사용하였다.
4.2 센서 통합 및 테스트
본 연구를 위해 제작된 동기화 모듈은 Fig. 9와 같으며 이를 이용하여 MMS센서를 기구물에 결합하여 실내 테스트를 진 행하였다. MMS 각각의 센서들에 대한 통합 플랫폼 설계 및 기구물 결합은 Fig. 10과 같다. 실내 결합 및 동기화 테스트를 마친 후 차량에 MMS를 장착하여 실외 테스트를 진행하였다.
스캐너와 항법장치에서 수집된 데이터를 표준 LAS (LASer) 데이터로 변환하기 위한 데이터 전처리 과정을 Fig. 11과 같이 구현하였으며, 관성항법장치와 스캐너의 점군데이터의 결합연 산은 3차원 좌표변환 행렬연산을 이용하여 개발하였다. 또한 점군의 좌표 변환은 크게 회전과 이동으로 나뉘며, 데이터 처 리 구현을 위한 블록다이어그램은 Fig. 12와 같다.
본 연구에서는 전처리 소프트웨어(software, S/W)도 개 Fig. 6. MEMS INS(OxTS)
Fig. 7. PPS and $GPRMC (GP Recommended Minimum data)
Fig. 8. Time synchronization of navigation instrument and sensor
발하였으며 , *.las 파일로 변환 저장하여 Leica, Trimble, Optech, TOPCON 등 외산 장비의 S/W상에서도 실행이 가 능하도록 구현하였다.
5. 실험결과 및 분석
5.1 장비 캘리브레이션
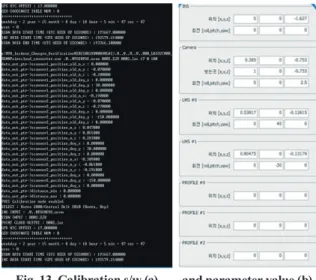
캘리브레이션 소프트웨어는 상대좌표로 이루어진 점군정 보를 절대좌표로 변화하고 시계열 상의 동기화 정보로 이루어 진 영상수집 시간을 실제적인 영상수집 시의 영상센서의 위 치와 자세로 변환하는 기능을 통합한 형태로 개발하였으며, Fig. 13과 같이 INS, camera, LiDAR 등과 같은 센서들의 파 라메타 값들을 추출할 수 있도록 구현하였다.
캘리브레이션은 조사데이터 로딩과 캘리브레이션 실행이 라는 두가지 작업을 수행하며, 1차 및 2차 조사데이터를 로딩 Fig. 9. Synchronization module
Fig. 11. Coordinates transformation of development software(rotate and move)
Fig. 12. Block diagram of data process
Fig. 13. Calibration s/w (a) and parameter value (b)
Fig. 10. MMS platform design (a) and sensor integration (b)
후 캘리브레이션 파라미터인 x축, y축, z축 및 roll, pitch, yaw 값을 설정 후 캘리브레이션을 실행하였다.
조사데이터 로딩을 통해 캘리브레이션의 기준이 되는 점군 데이터와 전방위 영상정보 비교 파라미터를 제공하며, 조사 데이터를 기초로 x축, y축, z축 및 roll, pitch, yaw 값의 수정 을 통해 캘리브레이션을 실행하였다. 캘리브레이션 처리 과정 은 Fig. 14와 같다
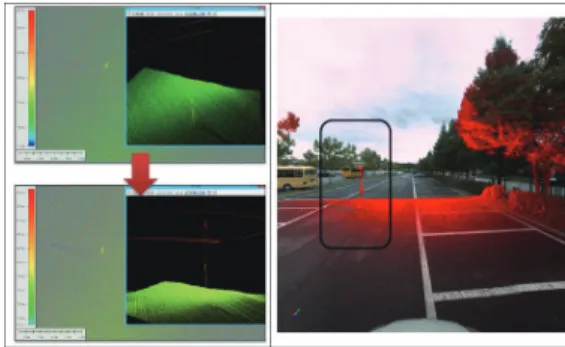
점군센서의 캘리브레이션 및 상대좌표 점군정보에 대한 절 대좌표 변환을 수행하였으며 비전센서의 위치, 자세정보의 조정을 통한 점군센서와의 통합 캘리브레이션을 수행하였다.
점군센서 간의 캘리브레이션을 위해 활용되는 기준점은 볼 타겟을 사용하였으며, 본 연구에서 사용한 볼 타겟은 상향과 하향 점군센서 각각에 대해 캘리브레이션을 수행하기 위해 Fig. 15와 같이 상, 하 두 개의 볼로 구성하였으며, 캘리브레이 션 수행 전·후 과정은 Fig. 16과 같다. 1차 촬영한 공간정보 데 이터와 2차 촬영한 공간정보 데이터를 로딩하여 파라미터 값 을 조정 및 추출하는 작업을 수행하였다.
5.2 MMS 데이터 취득 및 정확도 평가
본 연구의 대상지는 서울시 강남구일대로 선정하였으며, 대 상지 일대는 Fig. 17과 같다. 강남구는 고층빌딩과 교통량이 많 은 대표적인 밀집지역으로 기존 도로시설물들이 양호하게 구 축 및 관리 되는 지역이다. 연구 대상지역에 대한 MMS 데이 터를 취득하기 위하여 우선 차량 동선을 설계하였다. 설계는 단위 동선마다 고유 번호를 부여하는 방식으로 수행하였으며, 단위 동선은 도로명 주소체계를 기반으로 설정하였다. 설계 된 동선을 효율적으로 수집할 수 있도록 현장조사 수행 후 도 로 시설물 조사차량의 실제적인 이동 동선을 설계하였으며, 그
결과 연구대상지의 동선 설계 연장은 91.64km로 산출되었다.
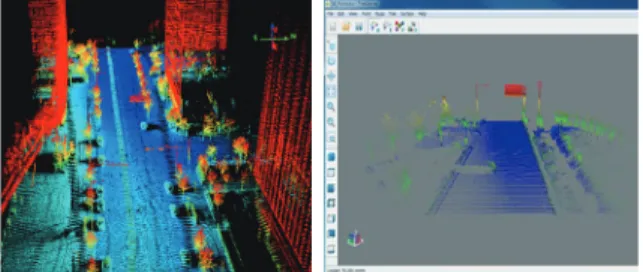
본 연구에서는 시설물을 검출하기 위하여 조사 차량의 수 집 동선을 따라 이동하면서, 점군 기반으로 도로표지를 추적 하고 도로표지 후보영역을 검출하는 방안을 수립 하였으며, 결과는 Fig. 18과 같다.
본 연구에서는 도로시설물 조사를 위해 저가형의 MMS 장 비를 개발하였으며, 이를 통해 취득한 데이터의 정확도 검증 을 수행하였다. 정확도 검증을 위해 검증대상 도로시설물을 선정하여 정밀 VRS 측량 및 TS측량(VRS측량이 불가능한 Fig. 14. Calibration process
Fig. 16. Calibration before and after of LiDAR data
Fig. 17. Test field
Fig. 15. Data acquisition (a) and calibration target (b)
지역의 측량)을 실시한 후 영상과 점군을 이용하여 실측된 동 일 대상물에 대한 좌표를 취득한 후 비교하는 방법으로 정확 도를 검증하였다. 단, 현재 도로교통시설물들의 검측을 위해 평면 좌표값만을 사용하고 있어, 본 연구에서 측량한 성과들 의 비교도 x, y 평면 좌표값만을 사용하여 검증하였다. 정확도 검증결과 수집데이터 기반 도로시설물 평면위치 정확도 검증 결과는 연구목표 정확도인 RMSE (Root Mean Square Error) 0.7m이내인 0.546m로 나타났으며, 측점별 결과값은 Table 2 와 Fig. 19와 같다.
고정밀지도제작을 위한 MMS의 경우 장비가격이 고가인 문제로 인하여 구매 업체가 많지 않아 다양한 분야에 적용 이 어려운 단점이 있는 반면, 본 연구를 통하여 개발된 MMS 의 경우 낮은 가격으로 제작이 가능하였고, 역설계(reverse engineering), BIM (Building Information Modeling) 등과 같 은 다양한 분야에 활용이 가능하다는 장점이 있다. 또한, 최근 저가형 고정밀 센서의 보급으로 향후 정확도가 향상된 저가형 MMS의 보급이 이루어 질것으로 판단된다.
Fig. 19. Plane accuracy of road facility data(Δx, Δy) Fig. 18. Point cloud data acquisition of road facility
No VRS or TS MMS ∆ Distance
error
X Y X Y ∆X ∆Y
1 417822.138 233645.890 417821.561 233645.938 0.577 -0.048 0.579 2 417822.154 233636.853 417822.844 233637.452 -0.690 -0.599 0.914 3 417822.154 233626.818 417822.070 233626.984 0.084 -0.166 0.186 4 417817.813 233622.790 417817.689 233622.186 0.124 0.604 0.617 5 417816.250 233618.894 417816.224 233619.560 0.026 -0.666 0.667 6 417817.929 233638.441 417818.228 233638.778 -0.299 -0.337 0.451 7 417817.978 233646.327 417818.605 233645.641 -0.627 0.686 0.929 8 417816.422 233651.974 417815.807 233652.641 0.615 -0.667 0.907 9 417813.405 233652.096 417813.147 233651.644 0.258 0.452 0.520 10 417814.765 233650.863 417814.430 233650.740 0.335 0.123 0.357
… … … … … … … …
… … … … … … … …
100 418811.889 228592.071 418811.461 228591.869 0.428 0.202 0.473 101 418811.874 228601.763 418812.432 228601.456 -0.558 0.307 0.637 102 418808.637 228609.072 418809.060 228609.429 -0.423 -0.357 0.554 103 418808.624 228597.164 418808.686 228597.238 -0.062 -0.074 0.097 104 418808.632 228586.835 418808.675 228586.714 -0.043 0.121 0.128 105 418808.601 228576.542 418808.681 228575.997 -0.080 0.545 0.551 106 418808.589 228570.213 418809.090 228570.701 -0.501 -0.488 0.699 107 418810.111 228555.706 418809.540 228555.572 0.571 0.134 0.587 108 418815.221 228548.656 418814.889 228548.965 0.332 -0.309 0.454 109 418810.610 228540.907 418809.958 228540.274 0.652 0.633 0.909 110 418815.197 228537.940 418815.058 228538.588 0.139 -0.648 0.663
1D RMSE - - - - - - 0.546
Table 2. Plane accuracy of road facility data (unit : m)
6. 결 론
본 연구는 MEMS 기반의 INS를 적용한 저가형 MMS를 개 발하고, 이를 통하여 도로시설물들의 위치를 조사하여 저가 형 MMS의 활용 가능성을 검토하고자 연구를 수행하였다. 본 연구를 통하여 다음과 같은 결론을 얻을 수 있었다.
1. MEMS기반의 저가형 차량용 MMS개발을 통하여 외산 제품에 의존하는 국내 MMS시장에 경쟁력을 갖춘 MMS의 개발이 가능함을 확인하였다.
2. MEMS기반의 INS를 적용하여 MMS 센서 동기화를 수 행하고, 카메라 및 LiDAR 캘리브레이션을 통하여 x, y 평면 거리오차가 0.546m의 정확도를 확보할 수 있었다.
3. 정밀지도제작을 위한 MMS가 아닌 교통안전 시설물 DB 구축을 위한 도로교통표지판의 위치측정 및 검수에 활용이 가능함을 알 수 있었다.
기존 MMS의 가격이 높아 다양한 분야로의 활용에 많은 어려움이 있었으나, 본 연구를 통하여 저가형 장비를 개발함 으로써 MMS를 이용한 역설계, BIM, 건설 및 시설물 유지관 리 등과 같은 다양한 분야에 활용이 가능할 것으로 판단된다.
또한 향후 정밀지도 제작이 가능한 저가의 통합센서 플랫폼 에 대한 다양한 연구가 필요할 것으로 판단된다.
References