논문 2013-50-12-18
히스토그램 구간 교정을 이용한 스테레오 영상의 휘도 보정
( Luminance Correction for Stereo Images using Histogram Interval Calibration )
김 세 호*, 김 희 석** ( Seaho Kimⓒ and Hiseok Kim )
요 약
스트레오뷰(Stereoview) 시스템에서 카메라 위치 또는 광원의 변화는 양안에 해당하는 두 영상 사이에서 휘도에 대한 색상 분포에 차가 발생 한다 .이러한 색상변화 차는 입체영상(3D) 코딩의 품질을 저하 시키거나 적합하지 않는 프레임이 발생한다.
이러한 휘도에 대한 색상분포 차를 보정하기 위하여 본 논문에서는 스트레오뷰 코딩을 위한 효율적인 히스토그램 구간 보정 방법을 제안하였다. 제안한 방법은 타겟뷰의 히스토그램을 분석하여 두 개의 영역으로 구분한 후 기준이 되는 영상의 히스토 그램과 영역별 최대 매칭 영역을 분석하여 컬러편차를 보정하도록 하였다. 그리고 제안한 히스토그램 매칭 방법을 다른 컬러 보정방법과 비교하여 휘도 성분 교정을 검증 하였다. 실험 결과 제안하는 알고리즘이 연산 속도와 휘도 교정 PSNR(Peak Signal to Noise Ratio) 결과에서 더 좋은 결과를 보였다.
Abstract
In stereo-view system, variations of target camera position or lighting conditions cause discrepancies on the luminance and chrominance components of stereo views. These discrepancies lead to inaccurate frame view prediction and low quality of 3 D video coding. In this paper, an efficient histogram interval calibration method is proposed for stereo-view coding, so as to compensate for the luminance component of target view. First the proposed method is analyzed by the histogram of the target image frame .Then, it divide two sections of histogram of that frame to correct the color discrepancies. Secondly, each section of the target frame is corrected the luminance component by identify the maximum matching region between the reference frame and the target frame. We have verified our proposed histogram matching method in comparison with the other color correction ones. Experimental results show that it can correct better luminance calibration results of PSNR(Peak Signal to Noise Ratio) and has less computation time.
Keywords: Stereo Image, Stereoscopic, Histogram Matching, Color Correction, Color Matching
Ⅰ. 서 론
최근에 3D 디스플레이 기능이 포함된 디지털 TV가 현재까지 꾸준히 시장을 점유하고 있으며 모바일 환경
* 정회원, 청주대학교 전자공학과 (Cheongju University)
ⓒ Corresponding Author(E-mail: [email protected])
※ 본 논문은 미래창조과학부 지원으로 수행한 ETRI SW-SoC융합 R&BD센터의 연구결과입니다.
접수일자: 2013년8월13일, 수정완료일: 2013년12월2일
에도 3D 컨텐츠가 제공 되고 있다. 뿐만 아니라 가정 에서도 어린이용 컨텐츠에서 게임에 이르기 까지 많 은 분야에서 입체영상 컨텐츠를 접할 수 있게 되었고 입체영상을 다양한 산업분야에 도입하고 있다.
이처럼 입체영상(3D) 방송 및 컨텐츠가 대중화 되면 서 입체영상을 촬영하는 기기에 대해서도 관심이 많아 지고 있다. 입체영상 생성방법에는 2D영상을 이용하여 입체영상을 생성하는 방법(2D to 3D), 사람의 좌‧우 양 안에 해당하는 두 개의 카메라를 이용하여 스테레오 영
상을 촬영하고 이를 이용하여 3D영상을 생성하는 스테 레오스코픽(Stereoscopic)방법과 다수의 카메라를 이용 하여 순차적인 스테레오 영상을 이용하여 입체영상을 생성하는 방법으로 멀티뷰(Multi-View)등이 있다[1].
이러한 다수의 카메라를 이용하여 입체영상 생성하 는 방법은 하나의 프레임에 다수의 영상을 포함한다.
각각의 영상은 서로 다른 위치에서 촬영되며 동일한 성 능의 카메라들을 이용하여 촬영하더라도 스테레오 영상 페어(Image Pair)간 광원에 의한 색상 분포의 왜곡이 발생한다.
이러한 색상 차의 외곡은 동일한 카메라를 사용 하더 라도 외부 환경에 의한 변화로 인하여 발생한다. 색상 분포 차의 외곡을 보정하기 위하여 최근에 R, G, B 색 상에 대한 보정 보다 Y,Cb,Cr 색상 변환에 대한 연구가 진행되고 있다. 특히 장치 내외부적 요인으로 인하여 나타나는 색상과 다른 색상을 가지게 되는 요인으로 광 원의 색온도에 영상을 많이 받는 휘도(Y, Luminance) 에 대한 보정 연구가 우선적으로 진행되고 있다[2].
색 상의 분포 차 보정을 위한 방법들은 스테레오 영 상뿐만 아니라 멀티뷰 시스템에서도 광범위 하게 연구 되고 있으며 크게 두 가지방법으로 나뉜다. 첫 번 방법 은 전체 보정(Global Correction)으로 한 쌍의 스테레오 영상에서 두 영상 사이의 색상 차를 히스토그램에서 색 상 분포 특성을 이용하여 왜곡된 영상에 보정을 해주는 방법이 있다. 이 방법은 두 영상 간의 히스토그램 색상 차를 SAD(Sum of Absolute Difference)연산을 통해 최 소 차가 발생하는 구간을 보정 값으로 정하고 이를 왜 곡된 영상에 더해주는 방법[3]과 Chen[4]이 제안한 두 영 상의 히스토그램에서 주색에 해당하는 영역을 나누어 주색에 대한 평균색상의 차를 보정 값으로 왜곡된 영상 에 더해주는 방법 이 있다. 최근에 Fecker[5]가 제안한 두 영상의 히스토그램을 구하고 이를 이용하여 누적 히 스토그램(Cumulative Histogram)을 계산 한 후 두 영 상의 색상 별 누적 히스토그램의 오차가 비슷하도록 히 스토그램 매칭 버퍼(Histogram Matching Buffer)를 생 성하고 이를 토대로 왜곡된 영상을 보정하는 방법 등이 있다.
이러한 전체 보정 방법들은 주로 히스토그램만을 분 석하여 영상 전체에 적용함으로 빠른 연산이 가능하다 는 장점이 있으나 Chen의 경우 주색의 범위를 찾기 위 한 별도의 연산이 필요하며, 히스토그램에서 색 분포의
형태가 유사한 형태로 왜곡 될 경우 보정하기 어렵고 Fecker의 경우 누적 히스토그램을 사용하기 위해 높은 비트수의 연산이 필요하다는 단점이 있다.
두 번째 방법은 부분 보정(Local Correction)방법으로 한 쌍의 영상 사이에 x축으로 이동 했을 시 영상 페어 사이의 깊이(Depth)가 최소 가 되는 지점을 찾아 두 영 상이 최대한 겹치게 한 후 N x M 크기의 윈도우를 이 용하여 두 영상 사이에서 각각의 윈도우 범위내의 픽셀 들의 차를 이용하는 방법[6~7]과 두 영상 사이의 동일 객체 또는 특징 점을 찾아 각각의 색차를 이용하여 보 정 하는 방법[8~9] 등이 있다. 이러한 부분 보정방법은 두 영상 간 깊이(Depth)가 최소가 되는 지점을 찾는 데 에 많은 연산량을 필요로 한다. 두 영상 사이의 최대 매 칭 지역(Maximum Matching Region)을 찾는 방법들로 는 Rank Filter[4], SAD(Sum of Absolute Difference) of Edge Projection[10], 그리고 Segmentation[11]등이 사용 된다. 그 외 Depth Map 기반[12]의 색 분포 보정도 꾸준 히 연구 되고 있다. 이러한 부분 보정 방법들은 최대 매 칭 지역을 계산하는데 많은 연산량을 필요로 한다. 또 한 스테레오 영상의 특징상 최대로 겹치는 지점을 정확 히 찾는다 해도 서로 다른 위치에서 촬영한다는 특성에 의해 동일한 객체의 윤곽선에서의 노이즈를 피할 수 없 다.
본 논문에서는 두 대의 카메라를 이용하여 입체 영 상을 생성할 때 외부 조건(광원) 과 카메라 특성 및 카 메라의 촬영 위치에 따라 발생 할 수 있는 두 영상간 의의 색상차를 보정 할 수 있는 방법을 적은 연산량으 로 색상 히스토그램을 적용하여 색 분포를 분석한 다 음 색 분포가 밀집된 부분과 분포가 낮은 부분을 나누 어 색 분포에 따른 부분적인 히스토그램 보정방법을 제안한다.
본 논문의 Ⅱ장에서는 히스토그램을 색의 분포도에 따라 보정 구간을 나누는 방법과 각 구간별 보정 값을 결정하는 방법을 기술한다. Ⅲ장에서는 두 개 구간에 대한 보정 값을 어떻게 적용 할 것인가에 대하여 기술 한다. Ⅳ장에서는 제안하는 보정 방법과 앞서 언급한 전체 보정 방법들과 연산시간과 PSNR을 이용한 보정 결과에 대하여, 마지막으로 V장에서 본 논문의 결론을 맺는다.
Ⅱ. 히스토그램 보정 값의 계산
1. 제안하는 히스토그램 구간 탐색 방법
본 논문에서는 휘도를 보정하는데 있어 히스토그램 에서의 색상 분포도에 따라 히스토그램을 두 개 구간으 로 나누어 각각의 구간별 보정 값을 따로 계산하고 이 를 이용하여 이미지 전체에 보정하는 방법을 제안 한 다. 영상 페어 간의 휘도 보정을 위하여 먼저 휘도에 대 한 히스토그램을 구한다. 이미지 의 크기를 × 이 라 할 때 휘도에 대한 히스토그램 은 식 1과 같이 계산 할 수 있다[5]. 식 1에서 와 에서
는 (Reference Image) 또는 (Distorted Image)로 서 영상 페어에서 색 분포의 기준이 되는 영상과 왜곡 된 영상을 의미 한다.
(1)여기서
i f ≡
휘도에 대한 히스토그램을 경계 지점
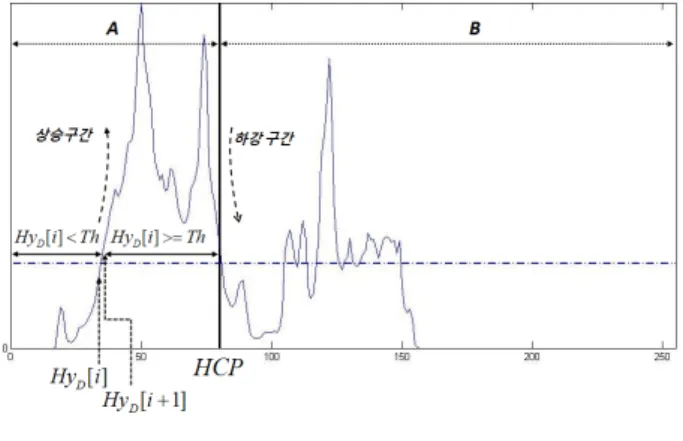
(Histogram Clustering Point)를 기준으로 두 개의 구간 A, B로 구분할 수가 있다. 즉 그림 1과 같이 히스토그 램의 색 분포 수의 기준선이 되는 값을 (Threshold) 로 정하고, 보다 적은 색상 분포를 가지는 구간에서 색 분포의 개수를 합산하는 (Lower Count)와
보다 높은 분포 수를 가지는 구간에서의 색 상 분포 수를 합산하는 (Upper Count)를 사용하면 히스 토그램 경계점 는 다음과 같이 어려 단계를 거쳐
그림 1. 히스토그램에 상승‧하강 구간 의 변수
Fig. 1. Variables of the rising and falling section in histogram.
도출 할 수 있다.
단계 ① Threshold, , , 와 의 초기화 과정:
‧ × , ‧ ,
‧ , 여기서 는 색상 값(Color Value)
단계 ② 히스토그램 하강 또는 상승지점에서의
후보의 판단 과정 :
히스토그램 상승 지점은 그림 1에서 값을 기 준으로 ≦ 조건을 만족 하는 색상 값 를 나타낸다. 히스토그램 상승 지 점에서의 후보 판단을 위해 우선 를 이용하여 보다 작은 분포를 가진 색의 범위 와 보다 높은 분포를 가진 색의 범위를 연속 구간에 대하여 다음과 같이 연산하여 를 저장하며 알고리즘으로 표현하면 다음과 같다.
‧ i f ≦
색 분포의 범위를 나타내는 저장된 가 최 소 구간을 제한하는 허용색상오차 보다 더 큰 값을 갖는 다면 상승지점 는 HCP 후보가 된다.
그런 다음 새로운 구간을 탐색하기 위해
를 0으로 초기화하여 2과정을 반복 한다. 이를 알고리즘으로 표현하면 다음과 같다.
i f ≦ 일 때 i f ≧
단계로 이동
단계 ③ 히스토그램 하강 지점은 그림 1에서 를 기준으로 ≧ 조건을 만 족하는 색상 값 를 나타낸다. 하강 지점에서의
후보 판단을 위해 우선 를 이용하여
보다 작은 분포를 가진 색의 범위와 보다 높은 분포를 가진 색의 범위를 연속 구간에 대 하여 단계2와 같이 연산하여 를 저장한다.
저장된 가 최소 구간을 제한하는 색 분포
허용 오차 보다 더 큰 값을 갖는 다면 하강 지 점에서의 색상 값 는 HCP 후보가 된다. 다음으 로 새로운 구간을 탐색하기 위해 를 0으로 초기화고 단계③과정을 반복 한다. 이를 알고리 즘으로 표현하면 다음과 같다.
i f ≧ 일 때 i f ≧
단계로 이동
단계 ④ 만약 특정 색상 값 가 더 이상 상승 또는 하강 지점을 찾을 수 없는 범위 즉, ≡ 가 될 때 후보가 1개라면 연산을 종료하고
를 기준으로 히스토그램을 두 개의 구간으 로 구분한다. 후보가 2개 이상일 경우 단 일의 를 얻기 위해 색 상 값 으로 초 기화 한 후 단계 ②, ③과정을 반복하여 한 개의
를 계산한다.
본 논문에서 색상분포 허용구간 은 큰 값으로 설정 할 수 록 값을 찾기 위한 반복처리 횟수가 줄어 드는 반면 작은 값으로 설정할 경우 색 분포가 밀집된 히스토그램 구간을 보다 더 세밀하게 구분할 수 있는 특징을 갖는다.
2. 히스토그램 각 구간에서의 보정 수치 계산 왜곡된 영상 의 휘도에 대한 히스토그램을
라 할 때 를 기준으로 두 개의 구간으로 구분 한다. 두 개의 구간 A, B에 대하여 각각의 범위를
, 라 할 때 식 2와 같이 히스토그램을 두 개 구간 으로 구분 한다.
, ≦ (2) , ≦ ≦
구간 별 보정 값을 도출 하는 방법으로는 두 영상에 해당하는 히스토그램을 이용한 최대 매칭 영역 (Maximum Matching Region)을 계산하는 방법을 사용 한다. 본 논문에서는 최대 매칭 영역을 찾기 위한 방법 으로 식 3과 같이 히스토그램을 구간별 SAD(Sum of Absolute Difference)연산을 적용하여 구간 별 오차
, 를 계산 한 후 최대 매칭 영역
이 되는 지점을 찾는다.
(3)
두 개의 구간 , 에 대하여 최대 매칭 영역이 된 다는 것은 구간 별 오차 , 에서 가장 작은 값을 갖는 , 만큼 이동하여 겹칠 경 우를 의미 한다. 따라서 구간별 최대 매칭 영역을 찾기 위해 수식(4)에서 표현된 것처럼 가장 최소값을 갖는 arg min 함수 기능을 적용 한다. 그러므로 가장 최소 값을 갖는 는 , 두 구간에서의 각각의 보정 수 치 , 가 된다[3, 9].
arg min (4)
arg min
Ⅲ. 히스토그램 구간별 보정 값의 적용
1. 제안하는 히스토그램 구간별 보정 방법
본 논문에서는 왜곡된 영상을 보정하기 위해 히스토 그램 매칭 버퍼(Histogram Matching Buffer)를 이용한 전체 보정방법을 사용한다. 히스토그램 매칭 버퍼를 사 용하여 보정하는 방법은 픽셀 값을 1:1로 변환 하여 별 도의 연산 과정 없이 보정 할 수 있다는 장점이 있다.
따라서 Ⅱ장에서 제안한 방법을 이용하여 , 두개 구간으로 분리된 히스토그램에서 구간별 보정 값 ,
를 도출하고 이를 히스토그램 매칭 버퍼연산에 적 용 한다.
(Corrected Image)를 보정 된 영상이라 할 때 일반 적인 히스토그램 매칭 방법은 식(5)와 같이 보정 값 를 계산한 후 이를 왜곡된 영상의 각각의 픽셀에 더해 주는 방법을 사용한다[3~4].
(5)
가. 히스토그램 구간별 보정의 문제점
식 (5)와 같이 보정 하는 방법은 매우 단순하며 별도 의 연산이 필요치 않다는 장점이 있다. 하지만 본 논문
에서는 히스토그램에서 두 개 구간에서 구간별로 다른 두 개의 보정 값이 존재 한다. 따라서 를 기준으 로 식 (6)과 같이 두 개 구간에 따라 두 개의 다른 보정 값으로 적용 할 수 있다.
i f
(6)
나. 히스토그램 보정 방법
식 (6)와 같이 보정 하는 방법은 색 분포의 단락 또 는 겹침 현상을 피할 수 없다. 따라서 색 분포를 보다 선형 적인 형태로 변형하여 색 분포의 겹침과 단락 현 상을 최소화 할 수 있는 방법으로 보정을 한다. 이를 위 하여 본 논문에서는 Piecewise Linear Interpolation[13]
을 적용하여 그림 3에서 나타낸 형태의 히스토그램 매 칭 버퍼를 그림 5와 같이 보다 선형적인 형태로 변형 하여 보정에 사용 한다.
(7)
식 (7)의 는 히스토그램 매칭 버퍼를, 는 보정 전 색 분포로서 히스토그램의 가로축에 해당되며 휘도의 색상 분포 범위는 0~255 이다.
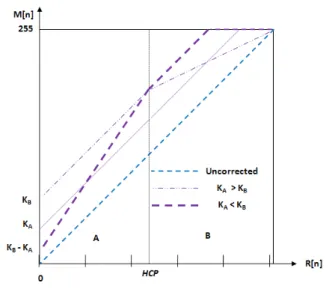
보다 선형적인 히스토그램 매칭 버퍼 생성을 위한 구 간별 연속 적인 좌표는 보정 값 와 의 대소 관 계에 따라 달라진다. 인 경우 식(8)에 의해 히스토그램 매칭 버퍼는 3개 구간(1 구간: [,], 2 구간: [,], 3 구간: [,])으로, 인 경 우 식(9)에 의해 2개 구간(1 구간: [,,] 2 구간:
[,])으로 나누어진다. 만약 와 가 같은 값을 갖는다면(≡) 식 (5)와 같이 보정 하게 된다.
식(6)을 이용하여 왜곡된 영상을 보정하기 위한 히스 토그램 매칭 버퍼를 생성하면 그림 2와같이 와 의 대소 관계에 따라 매칭 버퍼의 형태가 달라진다. 이 러한 경우 그림 3에 나타낸 것처럼 색 분포에 있어서의 겹침 또는 단락현상이 발생할 수 있다. 특히 색 분포의 단락현상은 그림 4와 같이 영상에서 동일한 객체 또는 영역에 비선형적인 색의 변화를 갖게 한다.
식(8)과 식(9)의 연속적인 좌표를 식(7)에 대입하여 각각 히스토그램 매칭 버퍼 에 대하여 구간 별 보
그림 2. , 에 따른 히스토그램 매칭버퍼의 색 분 포 형태
Fig. 2. Color distribution in histogram matching buffer between and
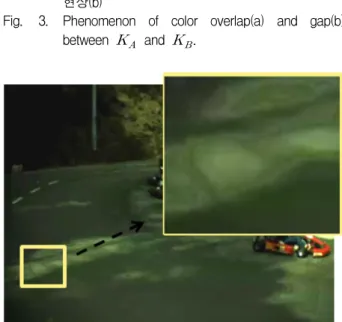
그림 3. , 대소 관계에 따른 색의 겹침(a)과 단락 현상(b)
Fig. 3. Phenomenon of color overlap(a) and gap(b) between and .
그림 4. 비선형적인 색의 변화에 의한 일그러짐 현상 Fig. 4. Distortion by nonlinear color transition
그림 5. Piecewise Linear Interpolation을 적용한 히스토그 램 매칭버퍼의 색 분포 형태
Fig. 5. Color distribution of the histogram matching buffer using Piecewise Linear Interpolation
그림 6. 비선형적인 보정(a)과 선형적 보정(b)결과 Fig. 6. (a) Result of nonlinear color correction
(b) Result of linear color correction.
정 수치를 일 경우에는 식(10), 일 때 식(11)으로 각각 나타내었으며 알고리즘으로 표현 하였다. 여기서 은 보정 전 색의 분포 값이며 그 림 5에서 보정 전(Uncorrected )그래프로 나타낸다.
이러한 선형적인 보정은 그림 4에서 발생한 부분적 인 일그러짐을 그림 6과 같이 방지 할 수 있다는 장점 이 있다.
(8)
(9)
i f ≦ ≦
i f ≦
(10)
i f ≦
(11)
Ⅲ. 실 험
본 논문에서 제안한 스테레오 영상에서의 이미지 페 어간 휘도 보정에 대한 방법의 성능 검증은 Matlab을 사용하여 검증한다. 또한 이미지 전체를 대상으로 히스 토그램만을 분석하여 보정하는 방법들로 Chen과 Fecker가 제안한 방법들과 연산 속도 및 보정 전후의 PSNR결과를 비교한다.
실험에 사용된 단일 영상 페어는 Middlebury[14]에서 제공하는 실험 영상 중 색 분포의 차이가 발생하는 영 상페어를 사용하였다. 각각의 영상 페어는 샘플 영상
No. Chen[3] x1회 Fecker[4] x10회 Proposed x10회
1 95.750000 3.984375 3.890625
2 111.546875 4.062500 4.140625
3 90.265625 3.875000 3.796875
4 102.453125 4.015625 4.609375
5 112.093750 4.171875 4.312500
6 111.656250 4.500000 4.828125
7 112.125000 4.296875 4.328125
표 1. 연산 속도 비교(Cupticks)
Table 1. Comparison results of execution time(Cupticks).
No. Images Image Size Uncorrected Chen[3] Fecker[4] Proposed 1 Aloe 1282x1110 28.804103 28.804103 30.313519 30.617407 2 Art 1390x1110 28.565059 28.565059 29.432861 29.449379 3 Baby2 1240x1110 29.654289 29.654289 33.389012 32.993796 4 Computer 1330x1110 29.306039 29.306039 30.246099 31.683449 5 Dolls 1390x1110 28.267186 31.612650 29.041766 29.438930 6 Drumsticks 1390x1110 29.306039 29.306039 30.246099 31.683449 7 Dwarves 1390x1110 28.122599 28.122599 29.711448 30.069035 8 Ballroom 640x480 32.089695 x 32.097518 32.397693 9 Exit 640x480 31.806480 x 32.048123 31.961818 표 2. 기존 방법과 제안하는 방법의 PSNR 결과 Table 2. PSNR results of the previous methods and our
proposed method.
Images 히스토그램 매칭 버퍼의 색분포 휘도 히스토그램 변화 결과
Art
Baby2
Dolls
표 3. 제안한 방법으로 비교 한 히스토그램 매칭 버퍼의 색분포와 휘도 히스토그램 변화결과
Table 3. Comparison color distribution results of the histogram matching buffer and luminance histogram variation with the proposed method.
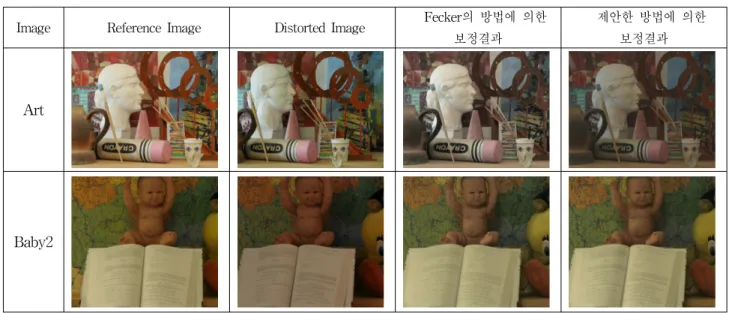
Image Reference Image Distorted Image Fecker의 방법에 의한 보정결과
제안한 방법에 의한 보정결과
Art
Baby2
표 4. 기존 방법과 제안한 방법의 결과 비교
Table 4. Comparison results of the previous methods and our proposed method.
들 중에서 영상은 view1 영상을, 영상은 view5 영 상을 각각 사용 하였다. 보정 전후의 PSNR 변화와 연산 속도는 Chen, Fecker의 결과와 비교 하였다. 또한 연속된 영상으로 Merl[15]의 표준 영상 중 색 분포차가 발생하는 영상 페어로 Ballroom(view4, view5, 250frames), Exit(view4, view5, 250frames)를 사용하여 프레임별 보 정 전후의 PSNR변화를 빠른 연산시간을 갖는 Fecker 결 과 와 비교 하였다.
본 논문에서 제안한 보정 방법을 으로 설정하 여 실험한 결과 7개의 단일 스테레오 영상 페어(표 1.) 에서 연산 속도는 Chen보다 매우 빠른 연산 속도를 얻 었으며 Fecker보다 3.5% 감소한 결과를 얻었다. 보정 전‧후 단일 영상 페어에 대한 PSNR 비교 결과는 평균 적으로 6.9%증가한 결과를 보였다(표 2. No. 1-7). 또한 연속된 스테레오 영상 페어(표 2. No. 8-9)의 실험 결과 Fecker와 비교하여 비슷한 성능을 보였다.
단일 영상 페어의 휘도 보정 결과는 표 3에 보정 전 후의 히스토그램의 형태 변화에 대하여 제시하였으며 단일 영상의 보정 전후의 예를 표 4에 제시하였다.
Ⅴ. 결 론
본 논문에서는 스테레오 영상 생성에 있어 발생 할 수 있는 스테레오 영상 페어간 휘도에 대한 왜곡을 효 과적으로 보정 할 수 있는 방법을 제안 하였다. 제안 된
방법은 스테레오 영상 페어간 휘도에 대한 히스토그램 을 계산하고 왜곡된 영상의 휘도 히스토그램을 두 개 구간으로 나누어 각각의 구간별 최대 매칭 영역을 찾아 구간별 보정 값을 구한 후 이를 색 분포 구간별 더해주 는 방법을 기술하고 실험하였다. 또한 히스토그램 구간 별 보정에서 발생 할 수 있는 색 분포의 겹침 또는 단 락 현상을 방지하기 위해 Piecewise Linear Interpolation을 적용하여 보다 선형 적인 색 분포가 발 생하도록 히스토그램 매칭 버퍼를 생성하여 보정하였 다. 실험결과 단일 영상에서 보정 전 후 PNSR 비교 결 과 및 연산속도에서 우수한 결과를 얻었다.
향후 연구 과제로는 스테레오 영상에서의 YCbCr 패 턴에서의 Cb, Cr의 보정과 RGB 패턴에서의 색상 보 정, 그리고 다수의 카메라를 이용하는 멀티뷰 시스템에 서의 영상 페어 사이의 색상 보정에 대하여 연구 하고 자 한다.
참 고 문 헌
[1] Sourimant Gael, “Depth maps estimation and use for 3DTV,” INRIA, pp. 9-29, 2010.
[2] Hyun Mook Ok, Moon Gi Kang, “Temporal Color Rolling Suppression Algorithm Considering Tiome-varying Illuminant”, IEEK, Vol. 48, no. 5, pp667-674, Sep 2011.
[3] Doutre, C., Nasiopoulos, P., “Color Correction of Multiview Video With Average Color as
저 자 소 개 김 세 호(정회원)
2006년 청주대학교 전자공학과 학사 졸업.
2008년 청주대학교 전자공학과 석사 졸업.
2009년~현재 청주대학교 전자공학과 박사 과정.
<주관심분야 : 영상처리, 컴퓨터, FPGA, ASIC>
김 희 석(정회원)
1985년 한양대학교 전자공학과 박사 졸업.
1988년~1989년 Univ. of Colorado 교환교수.
1987년~현재 청주대학교 전자공 학과 교수.
1997년~1998 년 University of California, Irvine 교환교수
<주관심분야 : 영상처리, 컴퓨터, 입체영상>
Reference,” Circuits and Systems, 2009. ISCAS 2009. IEEE International Symposium, pp.
860-863, British Columbia, May 2009.
[4] Yibin Chen, Kai-Kuang Ma and Canhui Cai,
“HISTOGRAM-OFFSET-BASED COLOR CORRECTION FOR MULTI-VIEW VIDEO
CODING,” Proceedings of 2010 IEEE 17th International Conference on Image Processing, pp. 977-980, Singapore, September 2010.
[5] Ulrich Fecker, Marcus Barkowsky, and Andre Kaup, “Histogram-Based Prefiltering for Luminance and Chrominance Compensation of Multiview Video,” IEEE Trans. Circuits and Systems for Video Tech., Vol. 18, no. 9, pp.
1258-1267, September 2008.
[6] Boxin Shi, Yangxi Li, Lin Liu, Chao Xu,
“BLOCK-BASED COLOR CORRECTION ALGORITHM FOR MULTI-VIEW VIDEO CODING, ”ICME 2009. IEEE International Conference, pp. 65-68, Beijing, China, June 2009.
[7] Feng Shaoa, Gang-Yi Jianga, Mei Yua, Yo-Sung Ho, “Fast color correction for multi-view video by modeling spatio-temporal variation,” Journal of Visual Communication and Image Representation archive, Vol. 21 No. 5, pp.
329-403, July 2010.
[8] Jae-Il Jung, Yo-Sung Ho, “Color Correction for Multi-view Images Using Relative Luminance and Chrominance Mapping Curves,”
Journal of Signal Processing Systems for Signal, pp. 1-11, December 2012.
[9] Yamamoto, K., Kitahara, M., Kimata, H., Yendo, T., Fujii, T., Tanimoto, M., Shimizu, S., Kamikura, K, Yashima, Y.,“Multiview Video Coding Using View Interpolation and Color Correction,” Circuits and Systems for Video Technology, IEEE Transactions, Vol. 17, No.
11, pp. 1436-1449, November 2007.
[10] Hi-Seok Kim, Sea-Ho Kim, Won-Ki Go, Sang-Bock Cho, “FPGA Implementation of Stereoscopic Image Proceesing Architecture base on the Gray-Scale Projection,” IEEK, ISOCC 2012, pp. 509-512, Jeju Korea, September 2012.
[11] Dorin Comanicio, Peter Meer, “Mean shift: a robust approach toward feature space analysis,”
Pattern Analysis and Machine Intelligence, IEEE Transactions, Vol. 24, no. 5, pp. 603-619, May 2002.
[12] Young Seok Heo, Kyoung Mu Lee, Sang Uk Lee, “Joint Depth Map and Color Consistency Estimation for Stereo Images with Difference Illuminations and Cameras,” IEEE Transaction on Pattern Analysis and Machine Intelligence, Vol. 25, No. 5, pp. 1094-1106, May 2013.
[13] https://ece.uwaterloo.ca/~dwharder/ ...
NumericalAnalysis/05Interpolation/piecewise/
[14] http://vision.middlebury.edu/stereo/data/
[15] ftp://merl.com/