천리안위성 정상 운영의 실시간 운영 특성
조영민*, 박철민*, 김방엽*, 이상철**
Characteristics of the Real-Time Operation For COMS Normal Operation
Young-Min Cho*, Cheol-Min Park*, Bang-Yeop Kim*, Sang-Cherl Lee**
요 약
통신, 해양, 기상의 세 분야 복합 임무를 수행하는 천리안위성(Communication Ocean Meteorological Satellite: COMS)은 정지궤도 동경 128.2°에서 2011년 4월부터 현재 정상 운영 임무를 수행하고 있다. 세 임무를 수행하기 위해 천리안위성에는 3가지 탑재체인 기상탑재체(Meteorological Imager: MI), 해양탑재체(Geostationary Ocean Color Imager: GOCI), 통신탑재체(Ka-band communication payload)가 실려 있다. 세 가지 임무 운영과 위성 유지 관리를 위해 위성 관제가 실시간 운영으로 수행된다. 위성 실시간 운영은 명령과 원격측정자료를 통해 위성과 직접 통신하는 업무이다. 본 논문에서는 천리안위성의 실시간 운영 특성으로 지상국 장비 구성과 일일, 주간, 월간, 계절별, 연간 운영 업무 특성을 논하였다. 천리안위성의 궤도상 시험(In-Orbit-Test: IOT) 말기 와 정상 운영 첫 해가 포함되는 2011년의 1년간 운영 결과에 대한 토의를 통해 성공적인 실시간 운영 결과 확인도 제시하였다.
Key Words : Communication Ocean Meteorological Satellite, COMS, Satellite Control Ground Station, geostationary satellite operation, real-time operation subsystem, ROS
ABSTRACT
Communication Ocean Meteorological Satellite (COMS) has the hybrid mission of meteorological observation, ocean monitoring, and telecommunication service. The COMS is located at 128.2° east longitude on the geostationary orbit and currently under normal operation service since April 2011. In order to perform the three missions, the COMS has 3 separate payloads, the meteorological imager (MI), the Geostationary Ocean Color Imager (GOCI), and the Ka-band communication payload. The satellite controls for the three mission operations and the satellite maintenance are done by the real-time operation which is the activity to communicate directly with the satellite through command and telemetry. In this paper the real-time operation for COMS is discussed in terms of the ground station configuration and the characteristics of daily, weekly, monthly, seasonal, and yearly operation activities. The successful real-time operation is also confirmed with the one year operation results for 2011 which includes both the latter part of the In-Orbit-Test (IOT) and the first year normal operation of the COMS.
※ 본 논문은 국제학회 ICSANE 2012에 발표된 내용을 증보 및 개정하여 작성되었습니다.
*한국항공우주연구원 정지궤도위성관제팀([email protected], [email protected], [email protected]), **융합기술연구팀([email protected]) 접수일자 : 2013년 5월 30일, 수정완료일자 : 2013년 6월 14일, 최종게재확정일자 : 2013년 6월 19일
I. Introduction
Communication Ocean Meteorological Satellite (COMS) for the hybrid mission of meteorological observation, ocean monitoring, and telecommunication service has been launched onto Geostationary Earth Orbit on 27 June 2010 (Korea Standard Time: KST). After launch the COMS has been located at the altitude of 35,800km directly above the
equator on the 128.2° East of the Earth geostationary orbit.
After successful completion of the In-Orbit-Test (IOT) for about 7 months, the COMS is currently under the normal operation for the regular mission services of meteorological observation, ocean monitoring, and telecommunication. The COMS has three payloads, which are the Meteorological Imager (MI), the Geostationary Ocean Color Imager (GOCI), and the Ka-band communication payload for the three missions[1-3]. Each
payload performs its dedicated mission respectively.
For the Earth observation missions of the meteorological observation and the ocean monitoring, the COMS requires daily mission commands from the satellite control ground station[4, 5]. Daily and weekly operations are also performed for the satellite attitude and orbit control which affect the Earth observation missions. And monthly, seasonal, and yearly operations are carried out for the satellite maintenance. Besides, sometimes Ka-band payload configuration is controlled for its mission operation.
Since April 2011, the COMS mission is under the normal operation 24 hours a day 365 days a year[5]. The normal operation of the COMS is conducted by the Korea Aerospace Research Institute (KARI) using the Satellite Ground Control System (SGCS) in the Satellite Operation Center (SOC) of the KARI. The SGCS at KARI in Daejon, Korea is primary system which is always used for the control of the COMS in its normal condition. In case of emergency, the COMS is operated by KARI using the backup system of the SGCS at the National Meteorological Satellite Center (NMSC) of Korea Meteorological Administration (KMA) in Jincheon, Korea.
All the controls and monitoring of the satellite are done by the real-time operation which is the activity to communicate directly with the satellite through command and telemetry. An introduction of the real-time operation task for the COMS was presented just after the IOT in a conference[6]. In this paper, for the COMS normal operation the real-time operation is discussed in terms of the ground station configuration and the characteristics of daily, weekly, monthly, seasonal, and yearly operation activities. The successful real-time operation is also confirmed with the one year operation results for 2011 which includes both the latter part of the In-Orbit-Test (IOT) and the first year normal operation of the COMS.
Ⅱ. Configuration of Real-time Operation Subsystem (ROS)
For the control of the satellite in the COMS normal operation, the SGCS performs satellite flight dynamics operations, satellite mission planning, 'satellite command generation and transmission', 'satellite telemetry reception and processing', and 'satellite tracking and ranging' as a main job. In the configuration of the COMS normal
operation, the SGCS consists of the Flight Dynamic Subsystem (FDS), the Mission Planning Subsystem (MPS), the Real-Time Operation Subsystem (ROS), and the Telemetry, Tracking & Command (TTC) with the ancillary parts of the Dynamic Satellite Simulator System (DSSS), the Operation Training Subsystem (OPTS), and the COMS View[6, 7]. The configuration of the SGCS is adjusted to the COMS normal operation somewhat differently from those of the development phase and the IOT operation[8-10].
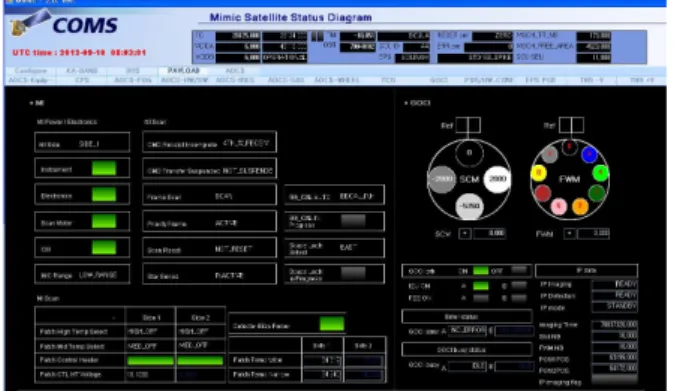
The main purpose of the ROS is to communicate directly with the satellite in real time, that is to send command to the satellite and to monitor satellite telemetry in real time. As an example of satellite telemetry monitoring by the ROS, the mimic display of the MI &
GOCI telemetries received from the COMS is shown in the Figure 1. For this real time communication, internally the ROS generates command, transmits command to TTC, receives telemetry from TTC, processes and analyzes telemetry, displays telemetry, generates alarm, archives telemetry, and manages its database. Externally the ROS sends and receives data from/to the other subsystems of the SGCS, the image data processing system of the KARI SOC, and the other ground stations of the COMS. The ROS is composed of ROS servers, ROS clients, ROS distributor, Ground Authentification Unit (GAU), and storage server.
The configuration of ROS is shown in the Figure 2 with both the internal and external interfaces of the SGCS. The telemetry data required for image data processing are sent to the 'Image Data Acquisition and Control System' (IDACS) at both the NMSC of KMA and the SOC of KARI and the IMage Pre-processing System (IMPS) at the Korea Ocean Satellite Center (KOSC) of Korea Institute of Ocean Science & Technology (KIOST). The telemetry data related to the Ka-band payload status are sent to the Network Control Center (NCC) of 'Electronics and Telecommunications Research Institute' (ETRI).
Figure 1. The mimic display of MI & GOCI telemetry
Figure 2. The configuration of ROS
Ⅲ. Characteristics of Real-time Operation Activities
The COMS is operated by KARI using the SGCS for 24 hours a day 365 days a year. The real-time operation of the COMS can be divided into regular operation activities and irregular operation activities. The regular operation of the COMS is categorized as daily, weekly, monthly, seasonal, and yearly operation. The irregular operation is performed aperiodically or without prearranged plan.
1. Daily real-time operations
The major daily operations of the COMS are the daily mission execution for 'the meteorological observation and the ocean monitoring', the Wheel Off Loading (WOL) maneuver of the satellite, and the satellite ranging. The COMS performs daily meteorological and ocean mission which are requested by the users, planned by the MPS, and uploaded by the ROS to the satellite every day[5]. In order to meet the operational requirement on the satellite attitude maintenance, the WOL maneuver is performed twice a day[11, 12]. The WOL is requested by the FDS, planned by the MPS, and uploaded by the ROS to the satellite every day. The satellite ranging is carried out to measure the distance from the ground station to the satellite by sending a Radio Frequency (RF) signal to the satellite and receiving the return signal reflected by the satellite. The ranging operation is executed usually every half or one hour by the real-time operator using the TTC and the ranging data are sent from the TTC to the FDS for the orbit determination.
2. Weekly real-time operations
The weekly operations of the COMS are Station-Keeping (SK) maneuvers of the satellite. In order
to meet the operational requirement on the satellite orbit maintenance, SK maneuver is carried out once a week in the East-West (EW) direction and in the North-South (NS) direction, respectively[13, 14].
3. Monthly real-time operations
The monthly operations of the COMS are the oscillator update and the InfraRed Earth Sensor (IRES) Moon blinding table update. The position of the Sun with respect to the satellite is continuously monitored by the sidereal oscillator and the tropical oscillator in the Satellite Computer Unit (SCU) of the COMS. The oscillator update is to update the both oscillators to account for the SCU clock drift. The oscillators are used for the Sun eclipse time calculation, the Sun sensor, the torque estimation of the satellite attitude, and the IRES masking time calculation. The oscillator update is requested by the FDS, encoded into command by the MPS, and sent by the ROS to the satellite every 4 weeks. The IRES is used for the satellite to find the Earth for its attitude control. When the Moon is close to the Earth and is in the IRES's view, the Moon should be masked so as to avoid fault operation of the IRES due to the Moon. The IRES Moon blinding table update is to send the Moon masking time and area data to the satellite. The IRES Moon blinding table update is requested by the FDS, encoded into command by the MPS, and sent by the ROS to the satellite every month.
4. Seasonal real-time operations
The seasonal operations of the COMS are the remote SCU maintenance, the battery cell balancing, the Electrical Power Subsystem (EPS) mode change, the eclipse monitoring, and the Sun interference monitoring. The remote SCU maintenance is to check the working condition of the redundant SCU in normal satellite operation state. Twice a year, for the remote SCU maintenance, the ROS puts the secondary SCU into the Ground Intervention Mode, sends a test command, checks the reaction of the secondary SCU through telemetry, and puts it back into standby. After remote SCU maintenance, the oscillator update is performed. The battery cell balancing is to make the voltages of battery cells uniform 10 days before each solar eclipse season in order to keep the battery lifetime longer. The battery cell balancing is carried out by the ROS twice a year. The EPS has two operating modes, the equinox mode and the solstice mode
in the normal operation of the COMS. The EPS mode change is performed by the ROS through command before and after each solar eclipse season, twice a year. The EPS mode change from the solstice to the equinox is carried out as a part of the battery cell balancing. Just after the mode change to the equinox, the battery is charged to the level of 186.7Ah so as to provide the satellite with enough power during the eclipse. And then the battery cell balancing begins. The EPS mode change from the equinox to the solstice is carried out about 4 days before the end of the eclipse season. In the solstice mode, the battery is charged to the level of 144.4Ah so as to make the battery life time longer by reducing the stress of the battery. The mode change to the solstice should be carefully executed not to reach over discharge. There are two solar eclipses which affect the geostationary satellite operation. One is the solar eclipse by the Earth and the other is the solar eclipse by the Moon. The eclipse monitoring is to keep a close eye on the satellite state during the both solar eclipses and to manage the EPS and the Attitude and Orbit Control Subsystem (AOCS) of the COMS during the eclipse by the Moon if necessary. The time data of the eclipse by the Moon are sent by the ROS to the satellite before the eclipse by the Moon and the battery charge is performed in advance to avoid over discharge during the eclipse, if needed. The eclipse monitoring is carried out by the ROS twice a year for the eclipse by the Earth and at the time of the eclipse by the Moon in a year. The Sun interference monitoring is to monitor the RF interference by the Sun to both the telemetry transmission in the S-band frequency and the image data transmission in the L-band frequency. The RF interference by the Sun occurs in every spring and autumn, twice a year. The time of the Sun interference is predicted by the FDS and the loss of telemetry and image data due to the Sun interference is monitored by the ROS and the IDACS in the KARI SOC respectively.
5. Yearly real-time operations
The yearly operations of the COMS are the WOL scale factor update, the Chemical Propulsion Subsystem (CPS) maintenance, and the IRES maintenance. The WOL scale factor update is to change the scale factor of the thruster efficiency for the compensation of the thrust decrease due to the pressure decrease in the propellant tank. The WOL scale factor update is performed by the ROS once a year.
The CPS maintenance is to use the redundant branch of
the thruster in the WOL and the SK maneuver for the check of its working order condition. The CPS maintenance is operated by the ROS once a year. The IRES maintenance is to power on the redundant IRES as well as the prime IRES, to compare the both IRES telemetries each other, and to check the satellite attitude for the sake of knowing whether the redundant one works well or not.
The major irregular operations of the COMS are the Ka-band payload control and the unknown RF interference monitoring. The Ka-band transponder configuration is sometimes controlled for its mission operation by the user request. The Ka-band payload is operated for the check of transponder RF performance, the measurement of the service coverage of the beam patterns, the rainfall attenuation test of the Ka-band satellite RF signal, and demonstrations of Ka-band satellite broadcasting. The change of the Ka-band channel path configuration is sometimes requested by the NCC to the ROS depending mission operation. It happens frequently to find some impacts on the S-band and the L-band RF signals with or without the loss of the telemetry or the image data. Most of them are supposed to occur due to unknown RF interference. These unknown RF interferences are monitored by the TTC, the ROS, and the IDACS.
Ⅳ. Real-time Operation Results of the First Year Normal Operation
After the IOT of about 7 months, since April 2011 the COMS is currently under normal operation for the regular mission services of the meteorological observation and the ocean monitoring 24 hours a day 365 days a year. The normal operation of the COMS has been conducted by the SGCS in the KARI SOC.
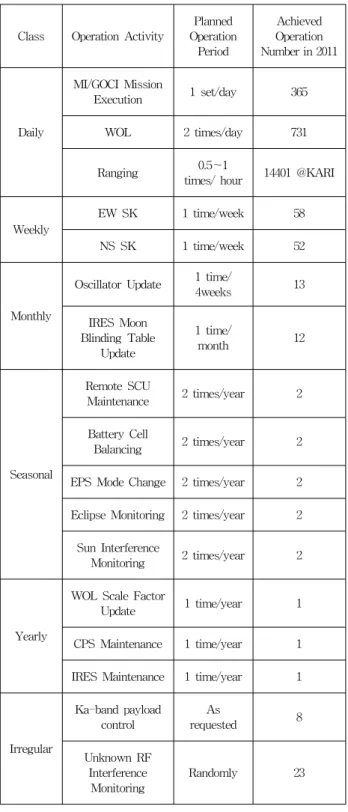
In the aspect of the real-time operation this paper provides the one year operation results for 2011 which includes both the latter part of the In-Orbit-Test (IOT) for 3 months and the first year normal operation for 9 months. The Table 1 shows the real-time operation results of the COMS with the operation numbers performed in 2011. In the Table 1, it is easy to find that the achieved operation numbers in 2011 match up very well with the planned operation period within small marginal variations for all the real-time operation
activities of daily, weekly, monthly, seasonal, and yearly operation.
Class Operation Activity
Planned Operation
Period
Achieved Operation Number in 2011
Daily
MI/GOCI Mission
Execution 1 set/day 365
WOL 2 times/day 731
Ranging 0.5~1
times/ hour 14401 @KARI
Weekly
EW SK 1 time/week 58 NS SK 1 time/week 52
Monthly
Oscillator Update 1 time/
4weeks 13
IRES Moon Blinding Table
Update
1 time/
month 12
Seasonal
Remote SCU
Maintenance 2 times/year 2
Battery Cell
Balancing 2 times/year 2 EPS Mode Change 2 times/year 2 Eclipse Monitoring 2 times/year 2
Sun Interference
Monitoring 2 times/year 2
Yearly
WOL Scale Factor
Update 1 time/year 1 CPS Maintenance 1 time/year 1 IRES Maintenance 1 time/year 1
Irregular
Ka-band payload control
As
requested 8
Unknown RF Interference
Monitoring
Randomly 23
Table 1. Real-time operation of the COMS in 2011
The Figures 3∼8 show the telemetry status related to the real-time operation activities of the WOL maneuver, the SK maneuver, the oscillator update, the battery cell balancing, the EPS mode change, the CPS maintenance for examples. The other examples are omitted to save paper pages. The WOL maneuver is one of major daily
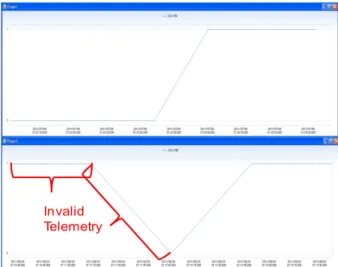
operations to control the satellite attitude, the telemetry display of WOL is shown in the Figure 3 as an example of daily operation result. In the Figure 3, the upper graph shows that the accumulated momentum of the satellite wheel is reduced to almost zero by the execution of WOL and the lower graph shows that the 3-axis satellite attitude angles are perturbed due to the WOL and tranquilized after the WOL. As an example of weekly operation result, the telemetry display of North-South SK is provided in the Figure 4. Since the SK maneuver is done for the satellite orbit maintenance, much larger angular disturbance is derived by the SK than the WOL as shown in the Figure 4. One of the monthly operation results is laid out in the telemetry list of the Figure 5, which confirms the update of the sidereal and the tropical oscillator data in the SCU by the oscillator update. For the example of seasonal operation results, the telemetry displays of the battery cell balancing and the EPS mode change are given in the Figures 6 and 7, respectively. The Figure 6 shows that the voltage differences among the battery cells decrease after the battery cell balancing in the upper and the middle plots, which are applicable to two different sets of the cells respectively. In the two plots, each cell voltage difference is marked with different colors. In the lower plot of the Figure 6, it is found that the maximum, mean, and minimum of the cell voltages get to the same value within the required accuracy after the battery cell balancing. The upper plot of the Figure 7 shows the temporal variation of the charge amount in the process of the EPS mode change from the equinox to the solstice. The lower plot of the Figure 7 displays the voltage transition from the equinox to the solstice during the EPS mode change operation. For the yearly operation result, the telemetry displays of CPS maintenance is provided for an example in the Figure 8. In the lower plot of the Figure 8 the telemetry proves that the latching valve for the redundant thruster branch is open so as to change the CPS configuration from the normal to the backup at the beginning of the CPS maintenance. In this plot the valve telemetry is invalid before the CPS maintenance. The upper plot of the Figure 8 provides that the latching valve for the prime thruster branch is open for the configuration return to the normal from the backup at the end of the CPS maintenance.
Therefore, in the Table 1 and the Figures 3∼8 it is confirmed that the real-time operations were successfully performed as planned and in good condition.
Figure 3. The satellite attitude fluctuation by an WOL and stabilization after the WOL
Figure 4. The satellite attitude fluctuation by a North-South SK and stabilization after the SK
Figure 5. The update of the sidereal and the tropical oscillator data in the SCU by the oscillator update
Figure 6. The battery cell voltage equalization by the battery cell balancing
Figure 7. The transition from the equinox voltage to the solstice voltage by the EPS mode change
Invalid Telemetry
Figure 8. The configuration change of latching valves in the prime and redundant thruster branches by the CPS maintenance
Ⅴ. Conclusions
Communication Ocean Meteorological Satellite (COMS) for the hybrid mission of meteorological observation, ocean monitoring, and telecommunication service is currently under normal operation service since April, 2011.
The real-time operation of the COMS normal operation is discussed in terms of the ROS configuration, characteristics of real-time operation activities, and real-time operation results of the first year normal operation.
The main purpose of the ROS is to communicate directly with the satellite in real time, that is to send command to the satellite and to monitor satellite telemetry in real time. The ROS is composed of ROS server, ROS client, ROS distributor, GAU, and storage server.
The real-time operation of the COMS can be divided into regular operation activities and irregular operation activities. The regular operation of the COMS is categorized as daily, weekly, monthly, seasonal, and yearly operation. The irregular operation is performed aperiodically or without prearranged plan. The characteristics of each activity is described.
In the aspect of the real-time operation this paper provides the one year operation results for 2011 which includes both the latter part of the In-Orbit-Test (IOT) and the first year normal operation. It is confirmed that the real-time operations were successfully performed as planned and in good condition.
Acknowledgements
The COMS is operating by the cooperation of KARI, KMA, KIOST, and ETRI under the financial supports from the Korean government ministries of 'Ministry of Science, ICT & Future Planning' (MSIP), KMA, and 'Ministry of Oceans and Fisheries' (MOF). Many thanks are given to their cooperation and supports. The COMS operators of the KARI SOC are appreciated highly for their efforts and passions devoted to the COMS operation.
References
[1] Y. Cho and H. Youn, “Characteristics of COMS Meteorological Imager”, Proceedings of SPIE 2006 Sensors, Systems, and Next-Generation Satellites X, Stockholm, Sweden, Vol. 6361, pp. 63611G-1-63611G-8, Sep.11-13 2006.
[2] H. Kim, G. Kang, B. Ellis, M. Nam, H. Youn, F. Faure, P.
Coste, and P. Servin, “Geostationary Ocean Color Imager (GOCI), Overview and Prospect”, Proceedings of 60th International Astronautical Congress, Daejeon, Republic of Korea, IAC-09.B1.3.9, pp. 1-11, Oct. 12-16 2009.
[3] S. Lee, J. Jo, M. You, J. Choi, and K. Ahn, “Ka band Communication Payload System Technology of COMS”, The Journal of the Korea Society of Space Technology, Vol.
5, No. 2, pp. 75-81, 2010.
[4] Y. Cho, "Earth Observation Mission Operaton of COMS during In-Orbit Test", The Journal of the Korea Society of Space Technology, Vol. 8, No. 1, pp. 89-100, 2013.
[5] Y. Cho, "COMS Normal Operation for Earth Observation Mission", Proceedings of SPIE Sensors, Systems, and Next-Generation Sateliites XVI, Edinburgh, United Kingdom, Sep. 24-27, Vol. 8533, pp. 85331S-1∼ 85331S-9, 2012.
[6] S. Lee, Y. Uhm, Y. Cho, B. Park, B. Kim, K. Yang, Y. Chun, C. Park, C. Han, and J. Suk, “An Introduction of Real-Time Operation Task for the COMS”, Proceedings of the 2011 KSAS Spring Conference, Gyeongju, Republic of Korea,
Apr. 13-15, pp. 1207-1211, 2011. (In Korean)
[7] S. Lee, Y. Park, B. Park, B. Kim, M. Baek, K. Yang, and Y.
Chun, “A Conceptual Design of 3D Monitoring Software for the COMS”, Proceedings of the 2009 KSAS Fall Conference, Kyeongju, Republic of Korea, pp. 1132-1135, Nov. 12-13, 2009. (In Korean)
[8] M. Baek, “Introduction on COMS In-Orbit Test for Meteorological Imager and Geostationary Ocean Color Imager”, Proceedings of the 2011 KSAS Fall Conference, Yongpyong, Republic of Korea, pp. 1068-1071, Nov. 9-11, 2011. (In Korean)
[9] B. Lee, I. Kim, S. Lee, Y. Hwang, W. Jung, J. Kim, H. Kim, H. Lee, S. Lee, Y. Cho, and B. Kim, “Operational Validation of the COMS Satellite Ground Control System during the First Three Months of In-Orbit Test Operations”, The Journal of the Korea Society of Space Technology, Vol. 6, No. 1, pp. 37-44, 2011.
[10] I. Kim, B. Lee, and J. Kim “Verification of Telemetry Processing and Display Functions of Satellite Ground Control System for Chollian Satellite”, Proceedings of the 2012 KSAS Fall Conference, Jeju, Republic of Korea, pp.
2210-2214, Nov. 15-16, 2012. (In Korean)
[11] S. Lee, B. Park, B. Kim, G. Ju, and Y. Park, “A Study on the East/West Station Keeping Planning Considering Wheel Off-Loading”, Journal of the Korean Society for Aeronautical and Space Sciences, Vol. 34, No. 9, pp. 60-66, 2006. (In Korean)
[12] B. Park, Y. Park, and S. Lee, “COMS Momentum Dumping Optimal Thruster Set Selection”, Journal of the Korean Society for Aeronautical and Space Sciences, Vol. 34, No. 11, pp. 54-60, 2006. (In Korean)
[13] B. Lee, Y. Hwang, H. Kim, and S. Park, “East-West Station-Keeping maneuver strategy for COMS satellite using iterative process”, Advances in Space Research, Vol.
47, Iss. 1, pp. 149-159, 2011.
[14] S. Lee, Y. Cho, Y. Park, B. Park, B. Kim, K. Yang, and Y.
Chun, “An Introduction of the N/S Station Keeping Operations for the COMS”, Proceedings of the 2010 KSAS Fall Conference, Jeju, Republic of Korea, pp. 1068-1071, Nov.
11-12, 2010. (In Korean)
저자
조 영 민(Young-Min Cho) 정회원
․1994년 2월:KAIST 물리학 박사
․1995년 3월∼현재:KARI 책임연구원
<관심분야> : 위성 탑재체, 위성 운용
박 철 민(Cheol-Min Park)
․2008년 2월 : 대전대학교 IT경영공학 과 학사 졸업
․2013년 8월 : 충남대학교 전자공학석 사졸업 예정
․2012년 8월∼현재:KARI 연구원 <관심분야> : Image navigation and registration
김 방 엽(Bang-Yeop Kim) 정회원
․2002년 8월:연세대학교 천문우주학 박사
․1995년 3월∼현재:KARI 정지궤도위 성 관제팀장
<관심분야> : 위성운용, 정지위성 임무해석
이 상 철(Sang-Cherl Lee)
․1999년 2월 : 전북대학교 항공우주공 학 석사
․2013년 2월 : 충남대학교 항공우주공 학 박사 수료
․2002년 3월∼현재:KARI 선임연구원 <관심분야> : 위성통신, 우주공학