<학술논문>
DOI http://dx.doi.org/10.3795/KSME-A.2012.36.11.1455
ISSN 1226-4873NREL 5MW 풍력 터빈 타워의 기계적 하중 완화§
남 윤 수
*
· 임 창 희*†
* 강원대학교 기계
·메카트로닉스공학과
Mitigation of Mechanical Loads of NREL 5 MW Wind Turbine Tower
Yoonsu Nam
*
and Chang Hee Im*†
* Dept. of Mechanical and Mechatronics Engineering, Kangwon Nat’l Univ.
(Received May 2, 2012 ; Revised May 29, 2012 ; Accepted June 7, 2012)
1. 서 론
풍력 터빈은 바람에너지를 기계에너지로 변환시 키는 에너지 변환장치이므로, 에너지(동등하게 파 워) 회수효율을 정의할 수 있다. 풍력 터빈의 파 워 회수효율은
C
P 로 표기하고, 파워 계수(power coefficient)라 부르며, 아래의 식으로 정의된다.(1,2)1/ 2 3
ELEC ELEC
P WIND
P P
C =P = ρAv (1)
여기서, PELEC = 풍력 터빈의 출력 파워(W) ρ= 공기 밀도
A, v= 풍력터빈 회전평면의 면적과 풍속
풍력 터빈의 형상이 결정되었다면, 풍력 터빈의 에너지 회수효율 CP 는 풍력 터빈의 작동환경에 의해서만 결정된다. 풍력 터빈의 작동상태는 풍속 v, 로터 회전속도 Ωr, 그리고 회전 블레이드의 피 치각 β 의 조합인 ( , ,v β Ω )로 결정되고, 이를 풍r 력 터빈의 작동점(operating point)이라 부른다. 즉, 풍력 터빈으로 불어오는 풍속이 일정하다면, 회전 날개의 속도와 블레이드의 피치각도 일정한 상태 로 운전되어야 하기 때문이다.
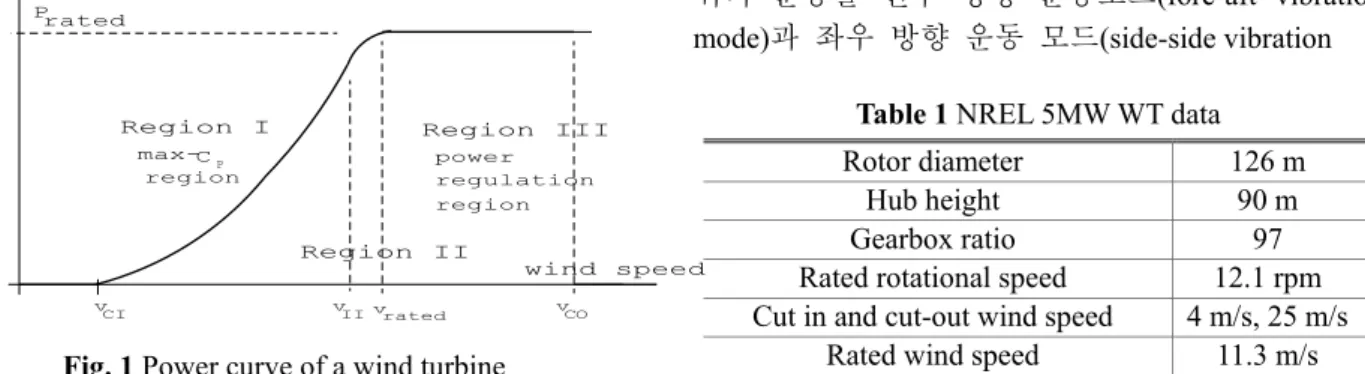
Fig. 1 은 풍력 터빈의 출력 파워커브(power curve) 를 개략적으로 나타내는데, 일정 풍속에 대하여, 그 Key Words: Wind Turbine(풍력 터빈), Tower Loads(타워 하중), Damping Enhancement(댐핑 증대), Mechanical
Load Alleviation Control(하중저감 제어)
초록: 풍력 터빈의 용량이 대형화될수록, 난류성분에 의한 풍력 터빈 구조물의 하중을 최소화시키는 하 중완화 제어가 점차 중요해진다. 한번 설치되면 20 년 이상 작동되어야 하는 풍력 터빈 구조물은 끊임없 이 바람에 의한 하중에 노출되는데, 이것이 적절하게 제어되지 않으면 풍력 터빈의 회전 반복운동에 의 하여 피로파괴에 이르게 될 가능성이 커진다. 본 논문은 NREL 5MW 풍력 터빈을 대상으로 타워의 하중 을 저감시키는 제어시스템을 설계하고, 이의 성능을 평가하는 내용을 담고 있다. 타워의 하중 완화제어 시스템을 설계하려면 5MW 풍력 터빈의 동적 특성이 먼저 파악이 되어야 하며, 파워 커브를 추종하는 기본 제어시스템의 설계가 선행되어야 한다.
Abstract: As the size of a wind turbine increases, the mechanical structure has to have an increasing mechanical stiffness that is sufficient to withstand mechanical fatigue loads over a lifespan of more than 20 years. However, this leads to a heavier mechanical design, which means a high material cost during wind turbine manufacturing. Therefore, lightweight design of a wind turbine is an important design constraint. Usually, a lightweight mechanical structure has low damping. Therefore, if it is subjected to a disturbance, it will oscillate continuously. This study deals with the active damping control of a wind turbine tower. An algorithm that mitigates the mechanical loads of a wind turbine tower is introduced. The effectiveness of this algorithm is verified through a numerical simulation using GH Bladed, which is a commercial aero-elastic code for wind turbines.
§이 논문은 2012 년도 대한기계학회 동역학 및 제어부문 춘계학술대회(2012. 4. 11.-13., 제주 KAL 호텔) 발표논문임.
† Corresponding Author, [email protected]
© 2012 The Korean Society of Mechanical Engineers
풍속에 대응하는 일정 출력이 생산되는 것을 알 수 있다. 풍속의 범위에 따라 출력 파워커브의 형상이 달라지는데, Fig. 1 에 도시된 대로 풍속에 따라 3 개 영역으로 구분할 수 있다. 시동 풍속 vCI부터 풍속 vII
까지의 영역을 Region I 이라 부르며, 이 영역에서는 풍력 터빈이 최대 에너지 회수 효율의 상태, 즉 max- CP의 상태로 작동된다. 정격 파워 Prated를 생산하기 시작하는 정격 풍속 vrated으로부터 풍력 터빈의 안전 을 위해 풍력 터빈의 운전을 정지시키는 차단 풍속 vCO까지의 영역을 Region III 라 한다. 식 (1)을 볼 때, 이 영역에서의 PELEC는 Prated의 일정한 값으로 유지되 어야 하므로 CP는 풍속의 3 승에 역 비례하도록 조절 되어야 한다. Region II 는 천이 영역으로, MW-규모 풍 력 터빈의 경우 블레이드 소음 제한조건에 의하여 그 영역의 범위가 설정된다. 풍력 터빈 제어시스템 설계에 있어서, 제 1 의 목적은 끊임없이 변하는 바람 에 대하여 Fig. 1 에 규정된 대로 출력 파워를 생산하 는 것이다. 한편, 20 년 이상의 수명주기를 갖도록 설 계되는 풍력 터빈이, 바람에 의한 기계적 하중의 중 첩으로 피로파괴에 이르지 않도록 풍력 터빈의 구조 물 하중을 완화시킬 수 있는 제어기법의 개발은 대형 풍력 터빈의 제품 경제성과 직결된 문제이다.
본 논문은 NREL(National Renewable Energy Laboratory) 산하 NWTC(National Wind Turbine Center)의 연구진들이 연구용 WT 으로 개발하여, 그 제원을 공표한 NREL 5MW WT(wind turbine, 풍 력 터빈)을 대상으로 풍력 터빈 제어시스템 설계 에 대한 문제를 다룬다.(3) Table 1 에 NREL 5MW WT 에 대한 특성 값들을 정리해 보았다. 제 2 장 에서는 NREL 5MW WT 의 동적 특성을 해석해 보 았고, 이로부터 Fig. 1 의 파워커브를 추종하는 제 어시스템 설계에 대하여 논의하였다. 설계된 제어 시스템의 성능은 풍력 터빈 전용해석 상업용 SW 팩케지인 GH Bladed 에 의하여 검증된다. 제 3 장 에서는 WT 의 주요 구조물인 타워의 하중을 경감 시키는 제어기 설계에 대한 문제를 다룬다. 구조
wind speed Electric power
vrated Prated
vCI vCO
max-C regionP
power regulation region Region I
Region II
Region III
vII
Fig. 1 Power curve of a wind turbine
물 댐핑 증대 방법에 대한 간략한 소개와 함께, 이러한 기본적인 개념이 거대 구조물인 풍력 터빈 의 타워 하중 완화에 어떻게 응용되는지 살펴 본 다. 설계된 타워 하중 완화제어 기법의 효용성은 GH Bladed 시뮬레이션 툴에 의하여 검증된다.
2. NREL 5MW 풍력 터빈의 제어시스템
2.1 NREL 5MW 풍력 터빈의 동적 특성 해석 바람이 불어오면 날개의 공기역학적 현상에 의 하여, 공력 토크(aerodynamic torque) Ta가 발생되는 데, 이는 식 (1)을 사용하여 표현할 수 있다.
3
2
ELEC P
a
r r
P C Av
T ρ
= =
Ω Ω (2)
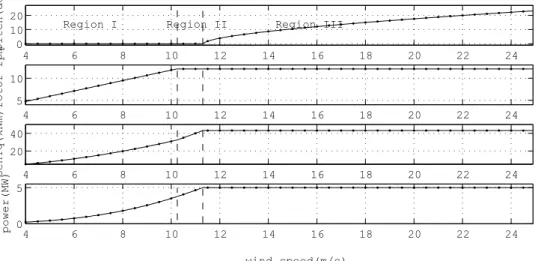
앞서 논의하였지만, 풍력 터빈으로 일정한 속도의 바람이 불어온다면, 풍력 터빈의 작동 상태도 정 상상태(steady state)가 되어야 한다. 즉, 식 (2)의 공 력 토크를 상쇄시켜, 로터 회전축의 알짜 토크를 0 으로 만드는 토크가 존재해야 하는데, 이것이 바 로 전력을 생산하는 발전기의 반력 토크이다. Fig.
2 는 NREL 5MW WT 의 정상상태 운전조건을 나타 낸다. 이 그림의 위로부터 풍속 변화에 따른 피치 각(deg), 로터 회전속도(rpm), 발전기 반력 토크 (kNm), 그리고 출력 파워(MW)의 정상상태 조건을 확인할 수 있다.
NREL 5MW WT 은 날개의 회전 직경이 126 m 에 이르고, 타워의 높이도 87.6 m 에 달하는 거대한 기계 구조물이므로, 다양한 형태의 기계적 운동이 복합되어 나타난다. Fig. 3 에 풍력 터빈의 구조를 개략적으로 그려 보았다. 이 그림에는 블레이드와 함께 회전하는 XB-YB-ZB 회전좌표계를(4) 볼 수 있는데, XB-축을 회전축으로 블레이드 전체가 진 동하는 운동을 엣지 방향 운동모드(edgewise vibration mode)라 하며, YB-축 회전축으로 진동하 는 운동을 플랩 방향 운동모드(flapwise vibration mode)라 부른다. 한편, 바람 방향을 기준으로, 타 워의 운동을 전후 방향 운동모드(fore-aft vibration mode)과 좌우 방향 운동 모드(side-side vibration
Table 1 NREL 5MW WT data Rotor diameter 126 m
Hub height 90 m Gearbox ratio 97 Rated rotational speed 12.1 rpm Cut in and cut-out wind speed 4 m/s, 25 m/s
Rated wind speed 11.3 m/s
4 6 8 10 12 14 16 18 20 22 24 0
10 20
pitch(deg)
Region I Region II Region III
4 6 8 10 12 14 16 18 20 22 24
5 10
rotor rpm
4 6 8 10 12 14 16 18 20 22 24
20 40
GenTq(kNm)
4 6 8 10 12 14 16 18 20 22 24
0 5
power(MW)
wind speed(m/s)
Fig. 2 Steady state operation of NREL 5MW WT
Fig. 3 Blade rotating coordinate system
mode)로 구분할 수 있다. 이 것들 외에도, 풍력 터빈 회전축 양끝 단에 위치한 2 개의 등가 관성질 량과 회전축의 비틀림 탄성에 의한 회전축계 진동 모드(drive train vibration mode)가 있는데, 이 운동모 드의 특성주파수 ωn는 아래의 식으로 주어진다.
(
2)
2
S R G
n
R G
k J J N N J J
ω = + (3)
여기서, kS= 회전축의 탄성계수 N= 회전축계의 증속비
JR, JG= 로터 및 발전기의 관성질량 풍속 변화에 따라 위의 운동 모드들의 특성이 어떻게 변화하는 가를 한 눈에 볼 수 있도록 나타
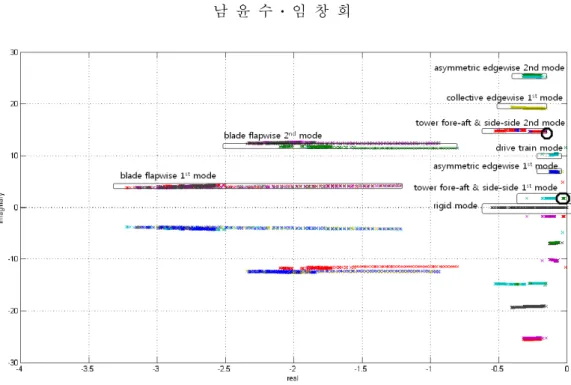
낸 것이 Fig. 4 이다. 시동 풍속부터 차단 풍속까지 전체 풍속의 범위를 0.1 m/s 간격으로 분할하여 얻 어진 각 작동점 ( , ,v β Ωr o) 에 대하여 비선형 풍력 터빈 운동 특성을 선형화 시킨 후, 각 운동 모드 의 특성을 s-plane 상에 도시한 것이다. Fig. 4 를 주 의 깊게 살펴보면, 풍력 터빈의 구조 진동모드는 풍속 변화에 민감한 운동 모드들과 그렇지 않은 운동 모드들로 양분된다는 것을 알 수 있다. 즉, 풍력 터빈구조물을 바람 방향으로 흔드는 운동 모 드들인 블레이드 플랩방향 운동과 타워의 전후 방 향운동 모드들은 풍속 변화에 따라 모드 특성이 크게 변하는 반면, 로터의 회전 운동에 연관된 운 동 모드들인 블레이드의 엣지방향, 타워의 좌우 방향운동 운동 (Fig. 4 에서 원으로 둘러 쌓인 영 역)과 회전축계 진동모드들은 그 특성이 거의 변 하지 않는 것을 볼 수 있다. 위와 같은 풍력 터빈 의 운동 특성은 다음 절에서 다루어질 풍력 터빈 제어시스템 설계와 깊은 연관이 있다. 예를 들어, Region I 풍속 영역에서는 날개의 회전속도가 풍속 에 비례하도록 발전기 토크를 제어하여야 하는데, 그 제어 구조는 풍속 변화에 대한 효과를 굳이 고 려하여 설계할 필요가 없게 된다. Fig. 4 에 담겨진 풍력 터빈의 모드 특성 정보는 Fig. 5 처럼 변환시 켜 나타낼 수 있다. 즉, 이 그림에서 볼 수 있듯이, 위로부터 2 개 창에는 타워의 전후 방향 운동 1 차 모드, 그리고 다음 2 개 창에는 블레이드의 플랩 방향 운동 1 차모드에 대한 고유 진동수와 댐핑의 변화가 풍속의 함수로 그려져 있다. Fig. 5 로부터 다음과 같이 유추할 수 있다. 타워의 전후 방향운 동 모드는 블레이드의 플랩 방향운동 모드와 비교 할 때, 상당히 낮은 댐핑을 갖는 운동모드라는 것
Fig. 4 Modal characteristics of NREL 5MW WT on s-plane
4 6 8 10 12 14 16 18 20 22 24
1.7 1.8 1.9
(wn)TOWER (r/s)
4 6 8 10 12 14 16 18 20 22 24
0 0.05
0.1
dampingTOWER
4 6 8 10 12 14 16 18 20 22 24
4 4.5
5 5.5
(wn)BLADE (r/s)
4 6 8 10 12 14 16 18 20 22 24
0 0.5
1
dampingBLADE
wind speed (m/s)
Fig. 5 Variation of natural frequency and damping of 1st tower fore-aft and flapwise blade mode with wind speed
을 알 수 있다. 따라서, 이 운동 모드의 댐핑을 증 가시키기 위하여 제 3 장에서 다루어지는 타워 댐 퍼의 적용이 요구된다. 특히, 블레이드 플랩방향 1 차 고유 진동수는 정격 풍속까지 그 값이 계속 증 가하는데, 이것은 날개 회전의 원심력 효과로 블 레이드의 강성이 증가한 이유로 발생된 것이다.
또한, 공기역학적 댐핑 효과에 의하여, 블레이드의 플랩 방향 고유 운동에 대한 진동은 큰 문제가 일 으키지 않는다.
2.2 NREL 5MW 풍력 터빈의 제어시스템
본 논문에서 다루는 NREL 5MW WT 에 적용될
pitch angle
torque
WT Dynamics
g Tg
winds
waves, earthquakes, ...
Tg r
s2+2 ngs+ ng2 ng
2
generator dynamics
pitch actuator PI
r
ref 0
C
torque command generation
power P E(s)
r(s)
TgC
Gen.
speed rotor speed
band pass filter
loop shaping filter kI
s
xfaft tower fore-aft Acl.
Fig. 6 Control system structure of NREL 5MW WT 제어시스템의 구조를 Fig. 6 에 개략적으로 나타내 었다. 크게 나누어, 발전기 토크 제어 루프와 피치 제어루프로 구성되어 있음을 알 수 있다. 특히, 발 전기 토크 제어 구조에서는 회전축계 운동모드의 댐핑을 증대시키기 위하여, 대역통과 필터(band pass filter)를 사용하여 식 (3)으로 주어지는 주파수 성분만을 선택하여 피드백하는 드라이브 트레인 댐퍼의 구조를 확인할 수 있다. 한편, 이 그림의 우측 상단부에는 다음 장에서 자세히 논의될 타워 댐퍼의 구조가 포함되어 있다. Fig. 6 구조의 제어 시스템 설계에 대한 자세한 논의는 본 논문에서는 생략하지만, 다른 논문에 다양한 방법으로 정리되 어 있다.(5~7) 여기서는, 난류강도 20.14%, 평균 풍
속 11 m/s 인 바람에 대한 GH Bladed 시뮬레이션 결과인 Fig. 7 과 Fig. 8 을 소개하고 이 절을 종료 한다. Fig. 7 의 첫째 창과 둘째 창에 그려진 응답 은 NREL 5MW WT 의 허브 높이 풍속과 로터 회 전속도이다. 정격 풍속인 11.3 m/s 보다 큰 풍속에 대하여, 로터의 회전 속도가 12.1rpm 으로 유지되 는 것을 볼 수 있다. 이후로 블레이드 피치각, 발 전기 토크, 그리고 출력 파워의 응답이 그려져 있 다. 한편, Fig. 7 의 마지막 4 개 창에 그려진 응답 은 #1 블레이드 루트(root) 부의 엣지 및 플랩 방 향 굽힘 모멘트와 타워 루트부의 좌우 및 전후 방 향 굽힘 모멘트를 각각 나타낸다. 타워 전후 방향 으로의 하중의 크기가 좌우방향 하중보다는 훨씬 큰 것을 볼 수 있다. 설계된 제어시스템은 전체적 으로 5MW WT 을 적절하게 제어하고 있는 것을 확인할 수 있다. Fig. 8 은 드라이브 트레인 댐퍼의 효과를 강조하기 위하여 준비된 것이다. 이 그림 의 위로부터 순차적으로 로터 회전속도, 피치각,
#1 블레이드의 엣지방향 모멘트, 그리고 타워의 좌우방향 모멘트를 각각 나타낸다. 1.66 Hz 성분의 진동이 포함되어 있는 응답이 드라이브 트레인 댐 퍼를 적용하지 않은 경우를 나타낸다. 즉, 드라이 브 트레인 댐퍼를 적용하지 않으면, 블레이드, 요
0 100 200 300 400 500 600
0 10 20
wind (m/s)
0 100 200 300 400 500 600
5 10 15
rotor rpm
0 100 200 300 400 500 600
−10 0 10
pitch (deg)
0 100 200 300 400 500 600
0 50
GenT (kNm)
0 100 200 300 400 500 600
0 5 10
power (MW)
0 100 200 300 400 500 600
−10 0 10
MxB#1 (MNm)
0 100 200 300 400 500 600
0 10 20
MyB#1 (MNm)
0 100 200 300 400 500 600
−20 0 20
MxT (MNm)
0 100 200 300 400 500 600
0 50 100
MyT (MNm)
time (sec)
Fig. 7 Simulation results of NREL 5MW WT for 11 m/s turbulent wind
310 320 330 340 350 360 370 380
10 12 14
rotor rpm
310 320 330 340 350 360 370 380
0 2 4 6
pitch (deg)
310 320 330 340 350 360 370 380
3 4 5 6
power (MW)
310 320 330 340 350 360 370 380
−5 0 5 10
MxB#1 (MNm)
310 320 330 340 350 360 370 380
−20 0 20 40
MxTower (MNm)
time (sec)
Fig. 8 Effect of a drive train damper
베어링, 타워 등의 구조물들이 피로 파괴에 쉽게 노출된다는 것을 확인할 수 있다.
3. 타워 하중완화 제어
타워 구조물의 기계적 하중 완화는 구조물의 댐 핑을 얼마나 증가시킬 수 있는 가에 달려 있다.
이 장에서는 타워의 1 차 진동 모드 댐핑을 증가 시키는 제어 기법에 대하여 간략히 논의하고, NREL 5MW 풍력 터빈 타워의 전후 방향 운동 하 중을 경감시키는 타워 댐퍼를 설계하고, 그 효용 성을 시뮬레이션을 통하여 검증하기로 한다.
3.1 타워 댐핑 증대 제어
제 2 장의 Fig. 6 에 타워 댐핑을 증대시키는 제 어기의 구조가 그려져 있는데, 타워의 전후 방향 운동속도를 피드백하는 구조라는 것을 한 눈에 알 수 있다. 즉, 바람 방향을 기준으로 너셀(nacelle)의 전후 방향 운동 가속도인 ɺɺ 을 적분하여 피드백xfaft 하는 형태로서, 시스템의 댐핑을 증가시키는 목적 으로 사용되는 전형적인 속도-피드백 구조이다.
이를 좀더 세부적으로 살펴보자. 구조물의 1 차 모 드 운동특성이 구조물의 운동을 크게 좌우하므로, Fig. 9 으로 간략화시켜 표현된 타워의 운동은 아 래의 식으로 기술된다.
mxɺɺ+cxɺ+kx=Ft+δu (4) 여기서, m= 1 차 운동모드의 등가 질량
c= 1 차 운동모드의 댐핑 계수
k= 1 차 운동모드의 등가 스프링 상수 Ft= 바람에 의한 추력(thrust)
δu= 타워 댐핑 증대를 위한 제어 입력
Fig. 9 Simplified model of tower fore-aft motion
faft( )
t t
u c x c x d
δ = − ɺ= −
∫
ɺɺ τ τ 의 피드백을 사용하면, 원천적으로 그 값이 작은 타워의 댐핑 계수 c 의 값을 (c+ct)로 증가시킬 수 있다. 문제는 제어입력 δu 와 풍력 터빈의 제어 인자인 피치각 β 을 어떻 게 연관시키는 가에 있다. 회전 날개의 피치각이 변화되면, 풍력 터빈 구조물에 작용하는 추력도 변화되므로, 즉 δu=(δFt/δβ δβ)o 의 관계가 성립 한다. 여기서, (δFt/δβ)o 은 피치각 변화에 대한 추력 변화 미분계수이며, 작동점 ( , ,v β Ωr o) 에 따 라 그 값이 변화된다. 따라서, δu= − ɺ 만큼의 추c xt 력을 발생시키려면, 아래의 식만큼 피치각을 조절 하면 된다.(8,9)(
t/t)
o faft( )c x d
δβ F τ τ
δ δβ
= −
∫
ɺɺ (5)3.2 NREL 5MW 타워 하중완화 제어
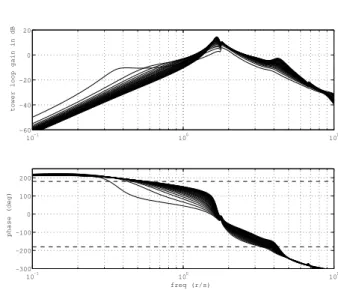
타워 댐퍼를 설계하기 위하여, NREL 5MW WT 에 대한 타워 루프의 주파수 응답을 살펴 보았다.
Fig. 6 구조의 타워 댐퍼에서 단순한 비례 제어만 을 적용한 경우에 대한 주파수 응답이 바로 Fig.
10 이다. 정격 풍속 11.3 m/s 부터 0.5 m/s 간격으로 24.8 m/s 까지 증가시켜 가면서 얻어진 선형시스템 을 기반으로 해석한 결과이다. 이 그림에서 2 개 의 모드 특성이 두드러지게 나타나 있는 것을 볼 수 있다. 즉, 1.76 r/s 의 타워 전후 방향 1 차 운동 모드와 4.24 r/s 의 블레이드 플랩 방향 1 차 운동모 드이다. 타워의 전후 방향 운동모드는 적절한 타 워 댐퍼를 설계하여, 그 모드의 댐핑을 증대시킬 것이다. 한편, 블레이드의 플랩 방향 운동모드는
10−1 100 101
−60
−40
−20 0 20
tower loop gain in dB
10−1 100 101
−300
−200
−100 0 100 200
phase (deg)
freq (r/s)
Fig. 10 Frequency response of tower damper loop
10−1 100 101
−80
−60
−40
−20 0
(Nac.Vel/wind)OP in dB
10−1 100 101
−80
−60
−40
−20 0
(Nac.Vel/wind)CL in dB
freq (r/s)
Fig. 11 Open and closed loop frequency response of a nacelle velocity for wind speed variation
타워 댐퍼 루프의 안정성에 큰 영향을 미친다. Fig.
10 에서 바로 알 수 있듯이, 4 r/s 근처에서 루프 게 인의 위상이 이미 -180o 에 도달하므로, 타워 댐퍼 의 성능을 개선시키기 위하여 피드백 게인 kI 의 값을 무한정 크게 설정할 수 없게 된다. 타워 댐 퍼 루프의 안정성 문제는 0.5 r/s 근처에서도 동일 하게 발생된다.
Fig. 11 에는 2 개의 주파수 응답이 그려져 있는 데, 모두 풍속 입력에 대한 너셀의 전후 방향 운 동 속도 크기 변화를 나타낸다. 타워 댐퍼를 적용 하지 않은 경우가 첫 번째이며, 단순한 비례 제어 기가 적용된 타워 댐퍼를 사용한 경우가 두 번째 의 주파수 응답이다. 타워 댐퍼를 적용하지 않는 경우, 모든 풍속에 있어서 1.76 r/s 의 타워 전후 방
향 운동 공진주파수에서 너셀은 제일 크게 흔들리 고 있는 것을 알 수 있다. 단순한 비례 제어기만 을 사용하는 타워 댐퍼를 적용해도, 이 공진 운동 의 크기를 상당히 줄일 수 있다는 것을 Fig. 11 의 두 번째 주파수 응답에서 확인할 수 있다. 그러나, 4 r/s 근처에서의 응답은 오히려 악화된 것을 볼 수 있다. 이것은 단순한 비례 제어기만으로는 타 워 댐퍼의 완벽한 기능을 기대할 수 없다는 것을 뜻한다. 따라서, 타워 댐퍼 제어기의 설계는 다음 과 같은 점들을 고려하여 진행하여야 한다. 1.76 r/s 에서의 루프 게인 크기 값을 크게 할수록, 바람에 의해 흔들리는 너셀의 운동의 진폭이 작아진다.
Fig. 10 의 루프 게인 주파수 응답을 살펴볼 때, 설 계될 타워 댐퍼가 충분한 안정도 여유를 갖기 위 하여, 0.5 r/s 근처에서는 위상을 감소시키는 동시에, 4 r/s 에서는 위상을 증가시키는 필터가 필요하다는 것을 알 수 있다. 따라서, 타워 댐퍼는 아래 식과 같은 위상 지연/전진 필터(phase lag/lead filter)가 필 요하다.
1 2
1 1 2 2
1 1
( ) 1 1
P
T s T s G s k
T s T s
α α
+ +
= ⋅
+ + (6)
18 m/s 의 풍속 조건에 대하여 타워 댐퍼의 루 프 게인 전달함수가 위에서 설명한 형상이 되도록, 위상지연/전진 필터를 튜닝하였다. 1 개의 위상지연 필터, 동일형상의 2 개 위상전진 필터, 그리고 플 랩 방향 운동모드에 의한 안정성(stability) 악화 문 제를 차단하기 위하여 식 (7) 형상의 노치 필터가 추가적으로 사용되었으며, 각 필터의 파라미터들 은 Table 2 에 정리되었다.
2
1 1 1
2
2 2 2
( / ) 2 ( / ) 1 ( ) ( / ) 2 ( / ) 1
N
s s
G s
s s
ω ζ ω
ω ζ ω
+ +
= + + (7)
최종 설계된 필터의 주파수 응답이 Fig. 12 의 왼 쪽 2 개 창에 그려져 있다. 여기서, 위의 것은 필 터 전달함수의 크기이며, 아래 것은 위상선도이다.
한편, Fig. 12 의 중간 2 개 창에 그려진 Bode 선도 는 타워 댐퍼 루프게인 전달함수의 주파수 응답이 다. 점선으로 나타낸 응답은 k=0.2(r/(m/s))의 단순 비례제어만을 사용한 경우이며, 실선으로 나타낸 응답은 Table 2 의 특성값을 갖는 필터를 사용한 경우에 대한 주파수 응답을 각각 나타낸다. 필터 의 적용으로, 비례제어만을 사용할 때 4 r/s 근처에 서 발생되는 타워 댐퍼 루프의 안정성 문제가 해 결된 것을 확인할 수 있다. Fig. 12 의 우측의 주파
Table 2 Parameters of loop shaping filter at18 m/s gain phase lag phase lead notch filter
k α1 T1 α2 T2 ω1 ω2 ζ1 ζ2
0.2 4 0.5556 0.2 0.7213 4.3 4.4 0.1 0.6
100 102
−30
−20
−10 0 10
filter gain in dB
freq (r/s)
100 102
−20 0 20 40 60 80 100 120
phase (deg)
freq (r/s)
10−1 100 101
−60
−40
−20 0 20
tower loop gain in dB
freq (r/s)
10−1 100 101
−300
−200
−100 0 100 200
phase (deg)
freq (r/s)
10−1 100 101
−60
−50
−40
−30
−20
−10 0
Nac.vel/wind in dB
freq (r/s)
10−1 100 101
−60
−50
−40
−30
−20
−10 0
Nac.vel/wind in dB
freq (r/s)
Fig. 12 Frequency responses of filter, loop gain transfer function, and open & closed loop nacelle velocity for wind speed input
0 100 200 300 400 500 600
10 20 30
wind (m/s)
0 100 200 300 400 500 600
11 12 13
rotor rpm
0 100 200 300 400 500 600
0 10 20
pitch (deg)
0 100 200 300 400 500 600
3 4 5 6
power(MW)
0 100 200 300 400 500 600
0 50 MyTOP(MNm)
0 100 200 300 400 500 600
0 50
MyTCL(MNm)
time (sec)
Fig. 13 Time domain responses
수 응답은 풍속 입력에 대한 나셀의 전후 방향 운 동속도 출력의 주파수 응답의 크기 선도이다. 점 선 응답은 타워 댐퍼를 적용하지 않은 경우, 실선 은 이를 적용한 경우를 각각 나타낸다. 우측 상단 의 응답은 18m/s, 그리고 우측 하단의 응답은 12m/s 과 24.5m/s 의 풍속조건에 대한 주파수 응답 이다. 타워 댐퍼의 적용으로 타워의 전후 방향
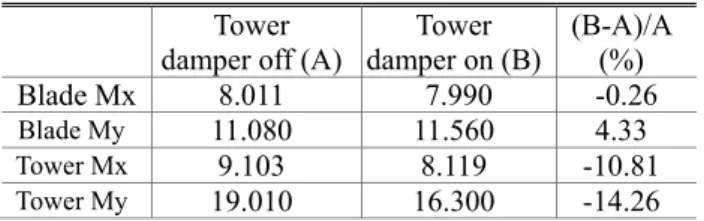
Table 3 DEL (MNm) comparison for time-domain simulation data of Fig.13
Tower damper off (A)
Tower damper on (B)
(B-A)/A (%) Blade Mx 8.011 7.990 -0.26
Blade My
11.080 11.560 4.33Tower Mx
9.103 8.119 -10.81Tower My
19.010 16.300 -14.26진동이 대략 10 배 감소하는 것을 볼 수 있다.
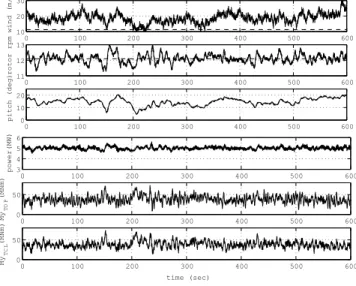
Fig. 13 은 평균 풍속 18 m/s, 난류강도 17% 바람 에 대한 NREL 5MW WT 의 GH Bladed 시뮬레이션 결과이다. 위로부터 4 번째 창까지 풍속, 로터 회 전속도, 피치각, 그리고 출력 파워의 응답이 도시 되어 있다. 전체 시간 영역에서 정격 풍속보다 센 바람이 불고 있으므로, 로터의 회전속도나 출력 파워는 정격으로 유지되고 있다. Fig. 13 의 마지막 2 개 창에는 타워 루트부에서의 전후 방향 굽힘 모멘트의 시간 응답이 그려져 있다. 이중에 위의 것은 타워 댐퍼를 사용하지 않는 경우이고, 아래 것은 타워 댐퍼를 사용한 경우에 대한 응답을 나 타낸다. 타워 댐퍼의 효과를 정량적으로 나타내기 위하여, 식 (8)로 정의되는 피로파괴 등가하중 (DEL: damage equivalent load)가 사용되었다.
1/
T f
m m i i i
n DEL
σ
= ⋅
∑
(8)
여기서, m= 3 (철제 구조물의 경우)
ni= T 시간 동안의 시계열 (time series) 데 이터에서 σi 크기 하중의 총 횟수 f= Hz 단위의 주파수
식 (8)로 정의되는 DEL 은 기계 구조물에 작용하 는 복합하중을 주파수 f 의 단일 하중으로 환산한 것이다. 즉, T 시간 동안의 복합 하중에 의하여 피 로 파괴가 일어나는 정도와 동등한 효과로 환산된 주파수 f 의 단일 하중의 크기로 변환시켜 나타낸 것이다. Table 3 에 Fig. 13 의 시뮬레이션 결과에 대 한 DEL 값들을 비교하여 정리하였다. 타워 댐퍼 를 사용하면, 블레이드 플랩 방향 굽힘 모멘트 하 중(Blade My)을 제외하고 모두 그 하중의 크기가 감소되는 것을 확인할 수 있다. 타워의 전후 방향 하중(Tower My)의 크기는 대략 14% 정도 감소한 다. 또한, 의도하지는 않았지만, 타워의 좌우방향 굽힘모멘트(Tower Mx)의 크기도 11% 정도 감소하 고 있음을 알 수 있다. 한편, 블레이드 플랩방향 하중을 감소시키려면, 개별피치제어(IPC, individual
pitch control)을 적용하여야 한다.(8)
4. 결 론
NREL 5MW 풍력 터빈의 타워 하중을 감소시키 는 타워 댐퍼를 설계하고, 그 효용성을 GH Bladed 시뮬레이션을 통하여 검증하였다. 본 논문에서 다 룬 5MW WT 의 타워는 20 년의 수명주기 동안, 대 략 108 번 정도 전후 방향으로 진동을 한다. 이 진동의 크기를 줄일 수 있다면, 타워의 경량화 설 계가 가능하여 제품의 경쟁력을 높일 수 있다. 위 상지연/전진 필터와 노치 필터를 조합하여, 타워 댐퍼를 설계하였다. GH Bladed 수치 시뮬레이션 결 과, 타워의 전후방향 굽힘모멘트 하중에 있어서 대략 14% 정도의 피로파괴 등가 하중 감소를 달 성할 수 있었다.
후 기
본 논문은 2012 년도 강원대학교 학술연구 조성비로 연구하였음.
참고문헌
(1) Hau, E., 2006, Wind Turbines, Fundamentals, Technologies, Applications, Economics, Springer, 2nd Ed.
(2) Burton, T., Sharpe, D., Jenkins, N. and Bossanyi, E., 2011, Wind Energy Handbook, John Wiley & Sons, 2nd Edition.
(3) Jonkman, J., Butterfield, S., Musial, W. and Scott, G., 2009, Definition of a 5-MW Reference Wind Turbine for Offshore System Development, Technical Report NREL/TP-38060.
(4) Bossanyi, E., 2009, GH Bladed User Manual (version 3.81), Garrad Hassan and Partners, 282-BR- 010
(5) Bossanyi, E., 2009, Controller for 5MW Reference Turbine, Project UpWind Report 11593/BR/04.
(6) Wortmann, S., 2009, REpower Field Test of Active Tower Damping, Project UpWind Report D5.6.3.
(7) Bianchi, F.D., Battisa, H.D. and Mantz, R.J., 2007, Wind Turbine Control Systems, Principles, Modeling and Gain Scheduling Design, Springer.
(8) Bossanyi, E., 2000, “The Design of Closed Loop Controllers for Wind Turbines,” Wind Energy, No. 3, pp. 149~163.
(9) van der Hooft, E.L, Schaak, P. and van Engelen, T.G., 2003, Wind Turbine Control Algorithm, ECN-C-03- 111.