CopyrightⒸ2015 KSAE / 134-04 pISSN 1225-6382 / eISSN 2234-0149 DOI http://dx.doi.org/10.7467/KSAE.2015.23.1.025 Transactions of KSAE, Vol. 23, No. 1, pp.25-33 (2015)
HILS 시스템을 통한 IPMSM의 철손저항 추정
정 기 윤
1,2)․강 래 청
2)․이 형 철
*3)한양대학교 전기공학과1)․자동차부품연구원 지능제어시스템연구센터2)․한양대학교 전기생체공학부3)
Prediction of Iron Loss Resistance by Using HILS System
Kiyun Jeong
1,2)․Raecheong Kang
2)․Hyeongcheol Lee
*3)1)Department of Electrical Engineering, Hanyang University, Seoul 133-791, Korea
2)Korea Automotive Technology Institute, 303 Pungse-ro, Pungse-myeon, Dongnam-gu, Cheonan-si, Chungnam 330-912, Korea
3)Department of Electrical and Biomedical Engineering, Hanyang University, Seoul 133-791, Korea (Received 26 February 2014 / Revised 13 June 2014 / Accepted 11 September 2014)
Abstract : This paper presents the d-q axis equivalent circuit model of an interior permanent magnet (IPM) which includes the iron loss resistance. The model is implemented to be able to run in real-time on the FPGA-based HIL simulator. Power electronic devices are removed from the motor control unit (MCU) and a separated controller is interfaced with the real-time simulated motor drive through a set of proper inputs and outputs. The inputs signals of the HIL simulation are the gate driver signals generated from the controller, and the outputs are the winding currents and resolver signals. This paper especially presents iron loss prediction which is introduced by means of comparing the torque calculated from d-q axis currents and the desired torque; and minimizing the torque difference. This prediction method has stable prediction algorithm to reduce torque difference at specific speed and load. Simulation results demonstrate the feasibility and effectiveness of the proposed methods.
Key words : Iron loss resistance(철손저항), Hardware-In-the-Loop Simulation(HILS), MCU(전동기 제어기), Real-time(실시간), Prediction(추정), Field Programmable Gate Array(FPGA)
1. 서 론
1)고성능 및 고효율 전동기를 탑재하는 수송시스템 에서 매입형 영구자석 동기 전동기(IPMSM)는 고토 크 및 출력 성능 특성 때문에 널리 사용되고 있다.
IPMSM은 권선형 동기 전동기 및 유도 전동기와 달 리 회전자 권선에 의해 발생하는 손실이 없기 때문 에, 전체 손실 중에서 철손이 차지하는 비중이 높으 며, 철손은 일반적으로 속도에 따라 증가하는 것으 로 잘 알려져 있다. 이런 이유로, IPMSM의 철손을 정확하게 추정하는 것은 고속영역에서 IPMSM 성 능의 한계치를 결정하는데 도움이 될 수 있다.
기존의 전동기 철손에 대한 연구는 대부분 유도
*Corresponding author, E-mail: [email protected]
전동기(Induction Motor) 위주로 이루어져 왔지만,
1,2)최근에는 높은 효율 및 출력 특성을 가지는 영구자 석형 전동기에 대한 다양한 철손 추정 연구가 활발 하게 이루어지고 있다.
3,4)특히, 일정 출력 영역에 국한되지 않고 다양한 부 하 조건에서의 영구자석형 전동기 고정자 및 회전 자 철손 해석 기법이 연구되고 있다.
대표적인 철손 추정 기법으로는 엡스타인(Epstein)
시험 결과를 바탕으로 전기강판의 철손을 추정하는
방법이 있다.
5,6)엡스타인 시험 기반의 철손 추정 기
법은 교번 자계를 고려한 철손 측정값으로 교번자
계 상태가 대부분인 변압기 철손 추정에는 적합하
지만, 복잡한 자속밀도 패턴을 가지는 회전기의 회
전자계 특성을 분석하기에는 한계가 있다.
정기윤․강래청․이형철
유한요소법(FEA) 기반의 철손 해석 기법을 통해 타당한 철손 추정 결과를 도출할 수 있지만, 많은 계 산 및 오차가 발생한다. 또 다른 방안으로, d-q축 등 가회로 모델
7-11)은 측정치에 매우 근접한 결과를 얻 을 수 있기 때문에 IPMSM의 철손 추정 모델로써 사 용되고 있다. 특히, 짧은 계산 시간과 다양한 작동조 건을 고려할 수 있다는 장점 때문에 효과적인 방법 으로 활용되고 있다.
최근에, 고속으로 스위칭하는 ECU의 입력과 출 력 작동환경을 모사할 수 있는 전용 FPGA I/O 보드 가 개발되었으며, 이러한 전용 I/O 보드를 활용한 ECU 인터페이스가 가능하다.
본 논문에서 사용된 ECU는 Motor Control Unit (MCU)의 파워부와 분리된 신호레벨 인터페이스로 작동이 가능한 제어보드이며, MCU의 파워부(IGBT) 와 IPMSM은 HIL 시뮬레이터의 프로세스보드에서 PWM 주파수와 동기되어 실시간으로 연산된다. 특 히, FPGA
12-14)IO 보드는 프로세서 보드에서 실시간 으로 시뮬레이션된 IPMSM 모델의 상전류와 각도 별 리졸버 신호를 MCU 제어보드에 제공하는 기능 을 갖고 있으며, 동시에 MCU 제어보드로부터 입력 되는 PWM 신호를 측정한다.
MCU 제어보드의 PWM 고속스위칭 신호를 측정 하여, 스위칭 신호의 일정한 주기내에 전동기 모델 을 안정적으로 실시간 시뮬레이션을 수행해야 한 다. 이러한 측면에서, 다양한 조건을 고려함과 동시 에 계산량이 작은 d-q축 등가회로 전동기 모델이 실 시간 시뮬레이션에 적합하다.
철손을 포함한 d-q축 등가회로 전동기 모델을 활 용하여 전동기 출력토크와 d-q축 전류만을 입력으 로 하는 철손추정 알고리즘을 제안한다.
전동기 해석을 통해 철손저항을 추정하는 연구가 많이 이루어졌지만, 해석기반의 철손저항 추정 오 차가 크게 발생하므로, 실험데이터를 활용한 철손 추정이 필요하다.
그러나, 본 논문에서는 철손을 포함한 d-q축 등가 회로 전동기 모델을 활용하여 전동기 출력토크와 d-q축 전류만을 입력으로 하는 철손추정 알고리즘 을 제안한다. 제안되는 철손저항 추정 방식과 알고 리즘은 특정값으로 수렴함을 확인할 수 있었으며,
실험데이터를 활용한 철손저항 추정에 직접적으로 적용가능하다.
이를 위해, 본 논문의 2장에서는 동손과 철손을 포함한 d-q축 등가회로를 다루며, 3장에서는 철손 저항을 위한 알고리즘 및 절차를 제안하며, 4장에서 는 MCU 제어보드를 포함한 HIL 시뮬레이션을 수 행하여 제안된 철손저항 추정 알고리즘을 검증한다.
2. 철손 저항을 포함한 IPMSM 모델링 IPMSM 모델은 Fig. 1의 d-q축 등가회로를 기준으 로 설계되며, 철손을 등가 철손 저항(
)로 근사화 하여 표현한다. 등가 철손저항은 유기전압(
) 에 병렬로 연결되어 있다.
(a) d-axis equivalent circuit
(b) q-axis equivalent circuit Fig. 1 d-q axis equivalent of IPMSM motor
2.1 d-q축 등가회로 기본 방정식
등가철손저항을 고려한 IPMSM 전압방정식은 식 (1)과 식 (2)로 표현된다.
(1)
(2)
where,
HILS 시스템을 통한 IPMSM의 철손저항 추정
: d-and q-axis stator voltages
: d-and q-axis induced stator voltages
: d-and q-axis induced currents
: d-and q-axis self-inductances
: flux linkage
: stator winding resistance
: iron loss resistance
: angular speed
정상상태(정속 혹은 정토크)에서 IPMSM 철손 저 항을 고려하여 유기된 전류(
)는 d-q축 전류 (
)와 철손전류(
)를 통해 식 (3)과 같이 계 산된다.
(3)
where,
: d-and q-axis stator current
: d-and q-axis iron loss current
이에 따라, IPMSM에 유기된 전류에 의해 생성되 는 출력토크(
)와 등가철손저항을 반영한 철손 (
)은 식 (4)와 식 (5)와 같다.
(4)
(5) where,
: pole pair
식 (3)으로부터, 정상상태에서 IPMSM d-q축 전류 관계식은 식 (6)과 식 (7)로 표현된다.
(6)
(7)
where,
(8)
위의 식 (8)로부터,
det
≠ 이므로 고정자 전류와 등가 철손 저항값에 의해 결정되는 유기된 전류는 대수적으로 특정값을 갖게 된다.
2.2 등가철손저항을 고려한 손실모델
정상상태의 IPMSM 입력은 식 (9)로 표현되며, 첫 번째 항은 동손(
), 두 번째 항은 철손(
),세 번째 항은 출력(
)을 의미한다.
(9)
전동기의 출력은 기계손을 포함하고 있으므로, IPMSM의 출력토크를 마찰토크와 순수 기계적 출 력토크로 분리하면 IPMSM의 출력토크는 식 (10)과 같이 표현된다.
(10) where,
: friction torque at reduction gear
: mechanical torque generated from a motor 회전자의 속도와 부하토크가 일정할 때, 마찰토 크와 기계적 출력토크는 일정한 값을 유지하게 된다.
3. 등가철손저항 추정 모델링
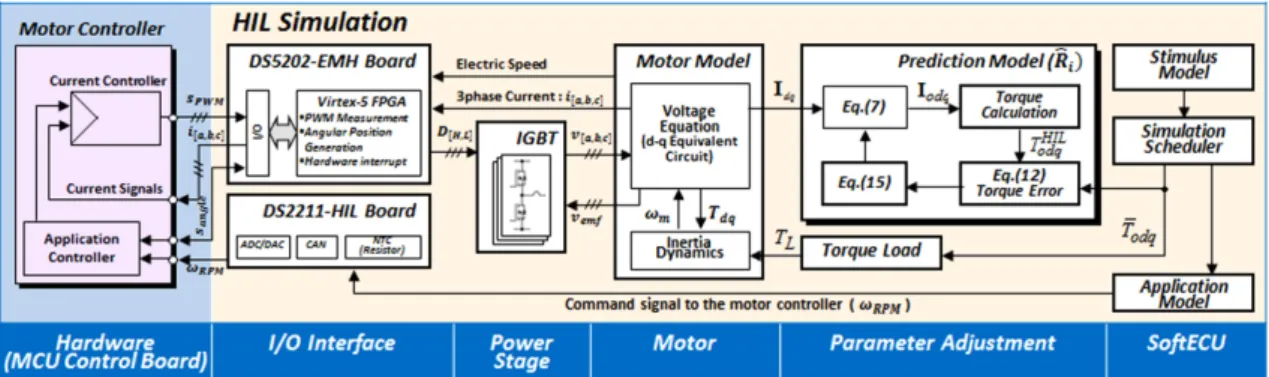
Fig. 2는 MCU 제어보드의 입출력 신호를 구성하
는 실시간 HIL 시뮬레이션을 도식화하였다. 실제
하드웨어부분을 제외한 모든 구성요소는 모델로 대
체되며, MCU 제어보드의 IO 인터페이스 매칭을 위
한 전용 IO보드가 사용되었다. HIL 시뮬레이션은
다음과 같은 주요한 구성요소로 이루어져 있다.
Kiyun Jeong․Raecheong Kang․Hyeongcheol Lee
Fig. 2 HIL simulation schematic to predict the iron loss resistance with MCU control board at a signal level interface
1) IO 인터페이스 : MCU 제어보드의 폐루프 실시 간 시뮬레이션을 위한 입출력 신호(PMW, 상전 류, Resolver, 온도 및 CAN 통신) 인터페이스 2) IGBT 모델
3) 등가철손저항이 반영된 IPMSM 모델 4) 등가철손저항 추정모델
본 논문에서 사용된 FPGA I/O 보드(DS5202)는 MCU 제어보드의 PWM 주파수와 동기되어 Duty Ratio값을 측정하며, d-q축 등가회로에 기초한 IPMSM 모델의 상전류값은 DS5202 I/O보드로부터 계산된 Duty Ratio값을 기준으로 프로세스 보드(DS1006)에 서 시뮬레이션된 평균값이다.
또한, IPMSM 모델의 상전류값은 MCU 제어보드 의 PWM 주파수와 동기되어 실시간으로 계산된다.
MCU 제어보드에 내장된 전류센서 샘플링 주파수 는 PWM 주파수와 동일하다.
Fig. 2에서 IPMSM 모델의 상전류값은 고조파성 분을 포함할 수 없는 한계가 있다. 그러나, MCU 제 어로직이 PWM 주파수와 동일하게 샘플링된 전류 센서값을 사용하므로, 고조파 성분이 반영되지 않 은 상전류 평균값을 MCU 제어보드 전류센서 입력 으로 사용가능하다.
3.1 정상상태 토크 3.1.1 마찰토크
일반적으로 MCU 제어보드는 마찰토크와 순수 한 기계적 토크가 합성된 부하토크와 동일한 출력 토크를 생성하도록 전류(
)를 제어하게 된다.
MCU제어보드의 실제 제어대상 전동기를 시험
하여 대상 전동기의 회전자 마찰토크를 측정하는 것이 타당하지만, 본 논문에서는 철손저항 추정방 법론을 제안하는 것이 목적이므로 마찰토크를 가정 치로 적용하였다.
3.1.2 IPMSM 출력토크
Fig. 2에서처럼, HIL Simulation 모델에서 설정된 속도지령치가 CAN 통신을 통해 MCU 제어보드에 제공되며, MCU 제어보드는 속도제어모드로 운전 된다. IPMSM의 기계적 토크가 일정할 경우 요구되 는 전동기 출력토크는 식 (11)로부터 다음과 같이 상수로 표현된다.
(11)
식 (11)에서 전동기의 기계적 출력토크는 가정치 를 반영하였지만, 전동기 다이나모 시험에서 측정 되는 토크센서값을 적용할 수 있다.
3.2 등가철손저항 추정 알고리즘
Fig. 3은 정상상태에서 결정된 IPMSM의 출력토 크와 d-q축 등가회로 IPMSM 모델의 d-q 전류를 사 용하여 철손을 추정하는 것을 나타낸다.
정상상태에서 등가철손저항은 상수로 가정할 수 있으며, 식 (4)로부터 HIL 시뮬레이션으로 계산된 IPMSM의 토크(
)와 식 (11)의 기준토크의 오차 는 식 (12)로 표현되며, 토크 오차의 절대값으로 정 의된 손실함수는 식 (13)과 같다.
(12)
(13)
Prediction of Iron Loss Resistance by Using HILS System
Fig. 3 Schematic diagram to predict the iron loss resistance
정속조건에서 IPMSM의 기준토크(
)는 상수 값이므로 철손저항 값의 변화에 따라 유기된 전류 와 무관하며, 등가철손저항에 대한 손실함수의 Gradient는 식 (14)와 같다.
(14)
손실함수를 최소화하기 위한 알고리즘은 MCU 제어보드의 PWM 주기내에서 task overrun 없이 실 시간 연산이 가능해야 하므로, 식 (15)와 같이 구현 이 용이한 “sign-sign” 알고리즘
15)을 사용하였다.
(15)
식 (15)의 adaptation gain(
)은 동적 수렴특성에 영향을 주는 주요인자이지만, 본 논문은 정상상태 에서 식 (15)의 추정알고리즘을 통해 계산된 철손저 항이 안정적으로 수렴하는지를 검증하는 것이 목적 이다. 또한, 식 (15)에서 추정된 철손저항은 대표값 으로 활용된다. 따라서, 일정한 상수값으로 결정된 adaptation gain을 시뮬레이션에 사용한다.
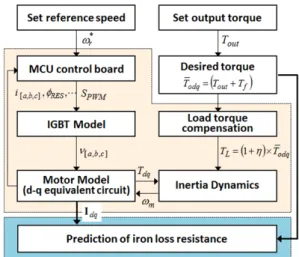
3.3 등가철손저항 추정 절차
Fig. 4는 IPMSM의 철손저항을 추정하는 프로세 스를 나타내며, 다음의 절차를 적용하여 등가철손 저항을 추정한다.
1) 전동기 회전자 속도(
)와 출력토크(
) 상 수값 설정
2) IPMSM의 철손저항을 고려하여 산정된 d-q축 전 류에 의해 결정되는 출력토크 요구치(
) 결정 3) 철손을 포함한 IPMSM 토크(
)가 발생하도록
Fig. 4 Process to predict the iron loss resistance
회전축의 부하토크(
)을 출력토크 요구치 (
)보다 높은 값으로 결정
4) MCU 제어보드의 PWM 신호 Duty Ratio값을 기준으로 계산되는 d-q축 전류를 통해 토크 (
) 계산
5) d-q축 전류(
)와 IPMSM 출력토크 요구치 (
)를 입력으로 하는 철손저항 추정알고리 즘 구현(Fig. 3 참고)
Fig. 4에서 실시간 시뮬레이션은 크게 2개의 프로 세스로 나뉜다. 동일한 시뮬레이션 초기조건에서, 첫 번째 루프는 MCU제어보드와 전동기 모델간 실 시간 시뮬레이션이 수행되는 부분으로써 요구 출력 토크보다 큰 부하토크를 적용하여 철손이 발생하는 현상을 모사한다. 또한, 설정된 부하토크조건에서 10kHz마다 시뮬레이션된 전동기 모델의 d-q축 전류 및 토크를 계산한다. 두 번째루프는 철손을 포함한 d-q축 전류와 전동기 출력토크를 사용하여 등가철 손저항을 추정한다.
전동기 모델은 철손저항을 포함하지 않으며, 철 손을 추정하는 루프는 MCU 제어보드의 제어방식 과 독립적으로 실행된다.
4. 시뮬레이션 결과
본 논문에서 제안된 알고리즘 식 (15)와 Fig. 4의
절차를 기준으로 철손저항을 추정한다.
정기윤․강래청․이형철
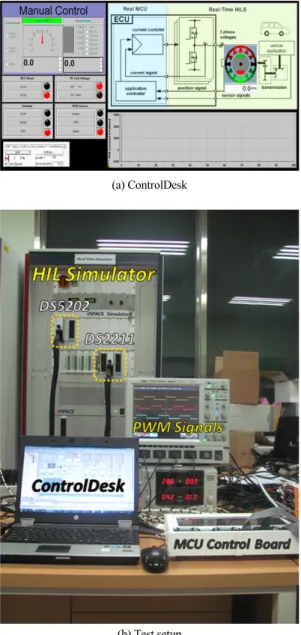
4.1 HILS 환경
Fig. 5는 MCU 제어보드와 HIL 시뮬레이터의 시 험환경을 나타낸다. Fig. 5(a)는 실시간 시뮬레이션 운영환경이며, Fig. 5(b)에서 MCU 제어보드는 기준 속도를 추종하기 위해 10kHz PWM 제어를 수행한다.
(a) ControlDesk
(b) Test setup Fig. 5 Configuration of HIL simulation
4.2 IPMSM 모델 파라미터
Fig. 5에서 전동기 모델은 HIL 시뮬레이터의 프로 세스보드(DS1006)에서 PWM 주파수와 동기되어
Table 1 Motor parameters
Parameter Value
Pole pair [ ] 8
Stator resistance(
) [Ω] 0.0277Flux linkage() [Wb] 0.208
DC link voltage [V] 640
Base speed [rpm] 1,500
실시간으로 계산되며, 전동기 모델의 주요한 파라 미터는 Table 1과 같다.
4.3 철손저항 추정 시뮬레이션
제안된 철손저항 추정 알고리즘은 Table 2 조건을 반영하여 실시간으로 시뮬레이션된 결과를 사용하 였다.
IPMSM의 회전축에 적용되는 부하토크가 출력토 크와 동일한 값으로 설정될 경우, IPMSM의 철손을 반영할 수 없으므로, IPMSM의 출력보다 큰 부하토 크를 모사하기 위해 Table 2의 부하토크 계수(
)를 고려하였다.
부하토크 계수는 IPMSM 출력토크대비 퍼센트로 설정하였지만, 시험데이터를 통해 취득한 대상 전 동기의 실제 효율값으로 대체될 수 있는 주요한 변 수이다.
식 (15)로부터 추정된 철손 저항값은 Fig. 6과 같이
Table 2 Simulation conditionsParameter Value
Torque output(
) [Nm] 160 Friction torque(
) [Nm] 0.4 Coefficient() for torque load [%] 10Reference speed [rpm] 1,500
Fig. 6 Simulation result of iron loss resistance
HILS 시스템을 통한 IPMSM의 철손저항 추정
고정자 d-q축 전류 변동분이 반영되어 있기 때문에 상수값으로 수렴하지 않지만, Table 3에서처럼 철손 저항값의 RMS는 23.07[ohm]이며 저항 오차값의 RMS는 0.07[ohm] 수준이므로 본 논문에서 제안된 추정알고리즘의 수렴 안전성은 확보되었다고 판단 할 수 있다.
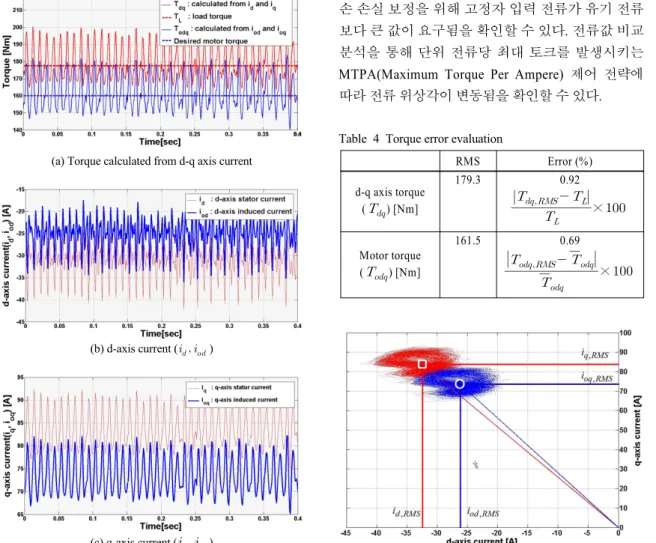
Fig. 7(a)는 d-q축 고정자 전류에 의해 계산된 토크 (
), 부하토크(
), 실시간으로 추정된 철손저항을
Table 3 Evaluation of iron loss resistanceRMS RMS error [ohm]
Iron loss
resistance () [ohm] 23.07 0.07
(a) Torque calculated from d-q axis current
(b) d-axis current ( )
(c) q-axis current ( ) Fig. 7 Simulation results according to = 10%
기준으로 계산된 출력토크(
) 및 전동기 출력 요 구치를 나타낸다. Fig. 7(b)와 (c)는 전동기 고정자 입 력 전류 및 철손이 반영된 유기 전류에 대한 시뮬레 이션 결과이다. d-q축 유기전류 및 출력 토크는 철손 저항값에 의해 결정되며, 철손 저항의 정확도는 매 우 중요한 요소이다.
Table 4는 계산된 토크의 RMS값과 오차에 대한 결과이며, 특히 오차값이 매우 작음을 알 수 있다.
식 (7)로부터 철손 저항값에 따라 유기된 전류는 유 일해를 갖기 때문에 추정된 IPMSM 토크값의 정확 도가 높다는 것은 철손 저항의 추정 알고리즘을 신 뢰할 수 있음을 의미한다.
Fig. 8은 대상 IPMSM의 고정자 입력 전류 및 철손 을 고려한 유기 전류 분포 및 실효값을 나타내며, 철 손 손실 보정을 위해 고정자 입력 전류가 유기 전류 보다 큰 값이 요구됨을 확인할 수 있다. 전류값 비교 분석을 통해 단위 전류당 최대 토크를 발생시키는 MTPA(Maximum Torque Per Ampere) 제어 전략에 따라 전류 위상각이 변동됨을 확인할 수 있다.
Table 4 Torque error evaluation
RMS Error (%)
d-q axis torque (
) [Nm]179.3 0.92
×
Motor torque (
) [Nm]161.5 0.69
×
Fig. 8 d-q axis RMS current phase
Kiyun Jeong․Raecheong Kang․Hyeongcheol Lee
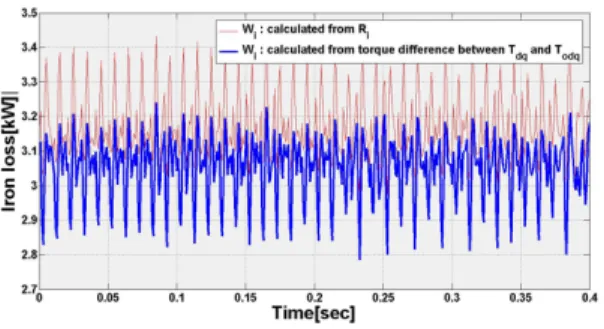
Fig. 9 Evaluation of iron loss
Fig. 9는 추정된 철손저항값을 적용하여 식 (5)로 부터 계산된 철손과 d-q축 전류에 따른 전동기 출력 차이
× 로부터 계산된 철손을 나타낸 다. 식 (5)의 철손 RMS값 대비 2개 신호의 철손 RMS 오차값은 약 4.6%이며, 철손저항의 오차에 의한 영 향으로 판단된다.
5. 결 론
본 논문에서는 d-q축 등가회로 IPMSM 모델을 활 용하여 등가 철손 저항을 추정하는 방법을 제시하 였다.
등가 철손 저항 추정알고리즘은 IPMSM의 d-q축 고정자 전류성분과 출력 토크를 알고 있을 경우에 특정값에 수렴하는 것을 알 수 있다.
향후에 전동기 시험을 통해 얻을 수 있는 전동기 효율맵을 기준으로 등가 부하토크값을 적절하게 선 정한다면, 본 연구에서 제시한 수식들과 철손추정 알고리즘을 활용하여 실제 전동기의 철손저항을 얻 는데 활용될 것으로 기대된다.
이러한 접근방식은 철손저항 추정에 사용되며, 또한 철손을 반영한 전동기 제어로직 구현에 적용 될 것으로 판단된다.
후 기
본 연구는 산업통상자원부 산업기술연구기반조 성사업(산업융합기반구축사업)으로 지원되어 구축 된 HIL 시뮬레이터를 활용한 연구임(M0000022).
References
1) C. A. Hernandez-Aramburo, T. C. Green and
A. C. Smith, “Estimating Rotational Iron Losses in an Induction Machine,” IEEE Trans. Magn., Vol.39, No.6, pp.3527-3533, 2003.
2) G. Diaz, P. Arboleya, G. Gonzalez-Moran and J.
Gomez-Aleixandre, “Revision of the Hysteresis and Excess Loss Computation Method as a Means of Improving the Rotational Loss Estimate in Induction Motors,” IET Electr.
Power Appl., Vol.1, No.1, pp.75-81, 2007.
3) K. Yamazaki and Y. Kanou, “Rotor Loss Ana- lysis of Interior Permanent Magnet Motors Using Combination of 2-D and 3-D Finite Element Method,” IEEE Trans. Magn., Vol.45, No.3, pp.1772-1775, 2009.
4) K. Yamazaki and A. Abe, “Loss Investigation Interior Permanent-magnet Motors considering Carrier Harmonics and Magnet Eddy Currents,”
IEEE Trans. Ind. Appl., Vol.45, No.2, pp.659- 665, 2009.
5) L. Ma, M. Sanada, S. Morimoto and Y. Takeda,
“Iron Loss Prediction considering the Rota- tional Field and Flux Density Harmonics in IPMSM and SynRM,” IEEE Proc.-Electr. Power Appl., Vol.150, No.6, pp.747-751, 2003.
6) L. Ma, M. Sanada, S. Morimoto and Y. Takeda,
“Prediction of Iron Loss in Rotating Machines with Rotational Loss Included,” IEEE Trans.
Magn., Vol.39, No.4, pp.2036-2041, 2003.
7) Y. K. Chin and J. Soulard, “Modeling of Iro Losses in Permanent Magnet Synchronous Motors with Field-weakening Capability for Electric Vehicles,” Int. J. Automotive Technology, Vol.4, No.2, pp.87-94, 2003.
8) G. R. Slemon and X. Liu, “Iron Loss in Per- manent Magnet Motors,” IEEE Trans. Magn., Vol.26, No.5, pp.1653-1655, 1990.
9) E. Dlala, “Comparison of Models for Estimating Magnetic Iron Losses in Electrical Machines Using the Finite-element Method,” IEEE Trans.
Magn., Vol.45, No.2, pp.716-725, 2009.
10) Y. Kim, “Analytical Study considering Both
Core Loss Resistance and Magnetic Cross Satu-
ration of Interior Permanent Magnet Synch-
ronous Motors,” J. of Magnetics, Vol.17, No.4,
pp.280-284, 2012.
Prediction of Iron Loss Resistance by Using HILS System