서론 I.
GNSS Loran (LOng
RAnge Navigation)-C .
. GNSS
, .
eLoran (enhanced Loran) Loran-C
. Loran-C , TOT (Time of Transmission)
. ,
. eLoran
GNSS .
* (Corresponding Author)
: 2011. 4. 18., : 2011. 7. 6., : 2011. 7. 20.
, :
([email protected]/[email protected])
: ( ) ([email protected])
: /
.
2011 26 ICROS .
Copyright© ICROS 2011
eLoran GNSS ,
eLoran GNSS [1].
eLoran Loran-C TDOA (Time Differential of Arrival) TOA (Time of Arrival)
. eLoran TOA
.
.
,
. eLoran TOA
, GPS
. ,
eLoran/GPS
. eLoran
GPS eLoran
.
기반 위치해 계산
II. TOA eLoran
의 측정치와 수신기 위치 추정
1. eLoran TOA eLoran
Verification of GPS Aided Error Compensation Method and Navigation Algorithm with Raw eLoran Measurements
, , , , *
(Se Phil Song1, Heon Ho Choi1, Young-Baek Kim2, Sang Jeong Lee1, and Chansik Park3)
1Department of Electronics Engineering, Chungnam National University
2Hanyang Navicom Co.,
3Department of Electronics Engineering, Research Institute for Computer and Information Communication, Chungbuk National University
Abstract: The Loran-C, a radio navigation system based on TDOA measurements is enhanced to eLoran using TOA measurements instead of TDOA measurements. Many error factors such as PF, SF, ASF, clock errors and unknown biases are included in eLoran TOA measurements. Because these error factors can cause failure in eLoran navigation algorithm, these errors must be compensated for high accuracy eLoran navigation results. Compensation of ASF and unknown biases are difficult to calculate, while the others such as PF and SF are relatively easy to eliminate. In order to compensate all errors in eLoran TOA measurements, a simple GPS aided bias compensation method is suggested in this paper. This method calculates the bias as the difference of TOA measurement and the range between eLoran transmitters and the receiver whose position is determined using GPS. The real data measured in Europe are used for verification of suggested method and navigation algorithm.
Keywords: eLoran, Bias compensation, TOA, GPS Aided eLoran
TOA , TOA
. TOA
1 . eLoran TOA
(1) .
(1)
TOA .
, ,
, 1 (PF:
Primary Factor), 2 (SF: Secondary Factor), 2 (ASF: Additional Secondary Factor), TOA 0,
AWGN .
TOA
, .
. ,
2 . (2)
.
(2)eLoran ,
,
. EF (Ellipsoidal Factor) , Vincenty
EF [2].
Vincenty
(3)
EF [3].
(3)
1 PF
, ×
,
× , (4) [4].
× (4)SF
, [4].
×
× ≤ ㎞
×
× ≻ ㎞(5)
ASF
, Millington 3 Monteath
. Monteath
[5].
.
, ASF
,
(6) .
(6)
ASF ,
.
ASF , ASF
,
1. eLoran TOA .
Fig. 1. TOA measurements of eLoran.
2. , .
Fig. 2. TOA measurements of eLoran.
3. Monteath Model.
Fig. 3. Monteath Model.
(ED: Emission Delay) . ED
. Loran GRI (Group Repetition Interval)
, GRI
. TOA
ED
, TOA ED
GRI
TOA . (7) .
≺ ≥ (7)TOA
(8) .
(8)
(9) .
⋮
⋮ ⋮
⋮
≡ (9)
, 0 ,
. (9)
(10) (11)
. , ∙ AWGN .
(10)
(11)Loran-C TOA eLoran
GNSS 2 ,
3 ,
. 2
, 3
, eLoran eLoran .
거리 측정치 보상 방법 2. GPS Aided eLoran
PF, SF, ASF
. ASF
, ,
,
. TOA
.
eLoran GPS , GPS
, GPS
. eLoran
. EF
. (6) TOA
(12) .
×
× (12)
TOA
TOA . GPS Aided
ED GRI,
. ,
, .
실측치 기반의 위치 추정 결과
III. eLoran
실측치를 이용한 거리 측정치 보정 결과 1.
eLoran
eLoran TOA . GPS
Aided eLoran
Reelektronika
[6]. Reelektronika
eLoran/GPS Loradd
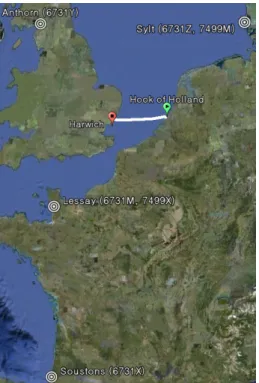
. 2010 7 20
. eLoran TOA
1 , 3 6731
, eLoran GPS
. 4 6731
.
Loradd NMEA 0183
Loradd PRLK
. NMEA 0183
,
“PRLK” ,
PRLK [7].
Loradd
5 .
TOA GPS eLoran
ED 6
TOA . 4
× [m] 10
. PF, SF ASF
6 ,
× [m]
. PF, SF, ASF
. 위치 추정 결과의 비교 2.
. , GPS Aided eLoran eLoran
. ,
, eLoran
GPS .
eLoran/GPS
GPS , epoch GPS Aided eLoran
eLoran
. , 2 epoch
epoch .
eLoran eLoran
Loradd GPS .
GPS
eLoran
. eLoran
GPS
.
7 eLoran TOA
.
TOA Loradd GPS
( )
.
8 eLoran GPS Aided eLoran
4. (6731 ).
Fig. 4. The trajectory of eLoran/GPS receiver and eLoran Stations(GRI 6731 Chain).
5. .
Fig. 5. Real ranges from each eLoran station to user.
6. TOA .
Fig. 6. Bias in TOA measurements.
. GPS Aided eLoran , Loradd
GPS . ,
epoch epoch
eLoran
. GPS Aided eLoran
, PF, SF, ASF
, .
9 Loradd GPS 2D 3D
eLoran , , ,
. epoch
GPS eLoran
. , 2D 3D
, 3D
, 0 [m]
.
1 eLoran GPS RMS (Root Mean
Squares) , 0
eLoran GPS .
, eLoran 2D 3D
RMS .
GPS Aided eLoran
eLoran GPS
.
결론 IV.
GPS Aided eLoran GPS
eLoran eLoran TOA
eLoran TOA
. TOA
PF, SF, ASF
. GPS Aided eLoran
eLoran/GPS
.
. ,
eLoran ,
GPS eLoran
. GPS
eLoran
90 100 [m] ,
30[m] . eLoran/
7. eLoran (GPS Aided ).
Fig. 7. eLoran navigation results(without error compensation).
8. eLoran ( ).
Fig. 8. eLoran navigation results(GPS aided error compensation).
9. GPS eLoran ( : 2D, : 3D).
Fig. 9. Difference between eLoran and GPS Navigation Results in 2D and 3D.
2D eLoran 3D eLoran GPS Aided
GPS Aided 45.57 [m] 80.54 [m]
GPS
GPS aided eLoran
. 참고문헌
[1] The Minister of Land, Transport and Maritime Affairs, Pohang & Kwangju Loran-C Station, http://www.
loran9930.go.kr
[2] T. Vincenty, “Direct and inverse solutions of geodesics on the ellipsoid with application of nested equations,”
Surv. Rev. 22, pp. 176-183, Apr. 1975.
[3] H. G. Lim, M. Y. Choi, C. S. Park, S. B. Son, H. K.
Joo, and Y.-B. Kim, “Development of eLoran navigation algorithm considering ellipsoidal earth,” Proc. of 2011 25th ICROS Annual Conference (in Korean), Chuncheon, Korea, May 2010.
[4] S. Lo, M. Leathem, G. Offermans, G. Thomas Gunther, B. Peterson, G. Johnson, and P. Enge, “Defining primary, secondary, additional secondary factors for RTCM minimum performance specifications,” Research
& Radionavigation, 2009.
[5] D. Last, P. Wiliams, and K. Dykstra, “Propagation of Loran-C signals in irregular terrain-modeling and measurements: Part1: Modeling,” International Loran Association Technical, 2000.
[6] Reelektronika, www.reelektronika.nl/
[7] LORADD series Integrated GPS/eLoran receiver Installation and operational manual, Reelektronika, User manual, 2009.
[8] C. S. Park and J. G. Yim, “A performance comparison of positioning methods considering measurement noise,”
Journal of Institute of Control, Robotics and Systems (in Korean), vol. 16, no. 12, pp. 1176-1178, Dec. 2010.
[9] D. H. Han, C. S. Park, D. H. Hwang, and S. J. Lee,
“Characteristics of the float solutions in epoch-by-epoch GNSS precise positioning,” Journal of Institute of Control, Robotics and Systems (in Korean), vol. 15, no.
12, pp. 1254-1257, Dec. 2009.
[10] S. P. Song, H. H. Choi, Y.-B. Kim, S. J. Lee, and C.
S. Park, “Verification of compensation and navigation algorithm using raw eLoran measurements,” Proc. of 2011 26th ICROS Annual Conference (in Korean), Gwangju, Korea, May 2011.
송 세 필 2010
. 2010 ~ .
GNSS, .
김 영 백
1982 .
1984 . 1998
. 1984 ~1998 1998 ~ . , Anti-jamming.
박 찬 식 1984
. 1986 . 1984
~1997 . 1997
. 1997 ~
. GNSS,
, .
최 헌 호 2008
. 2010 . 2010 ~
. GNSS, Multipath, Anti-jamming,
.
이 상 정
1979 .
1981 . 1987
. 1987 ~
. , GNSS,
Anti-jamming.