Journal of Institute of Control, Robotics and Systems (2016) 22(10):811-816
http://dx.doi.org/10.5302/J.ICROS.2016.16.0127 ISSN:1976-5622 eISSN:2233-4335
선형 레이저 광 영상기반 다면 3 차원 스캐너 Multi-facet 3D Scanner Based on Stripe Laser Light Image
고 영 준, 이 수 영* (Young-Jun Ko1 and Soo-Yeong Yi1,*)
1Dept. of Electrical and Information Engineering, Seoul National University of Science and Technology
Abstract: In light of recently developed 3D printers for rapid prototyping, there is increasing attention on the 3D scanner as a 3D data acquisition system for an existing object. This paper presents a prototypical 3D scanner based on a striped laser light image. In order to solve the problem of shadowy areas, the proposed 3D scanner has two cameras with one laser light source. By using a horizontal rotation table and a rotational arm rotating about the latitudinal axis, the scanner is able to scan in all directions. To remove an additional optical filter for laser light pixel extraction of an image, we have adopted a differential image method with laser light modulation. Experimental results show that the scanner’s 3D data acquisition performance exhibited less than 0.2 mm of measurement error. Therefore, this scanner has proven that it is possible to reconstruct an object’s 3D surface from point cloud data using a 3D scanner, enabling reproduction of the object using a commercially available 3D printer.
Keywords: 3D scanner, laser structured-light, rotation table, optical triangulation, differential image method, 3D printer
I. 서론
최근 3D 프린터에 대한 관심이 증가하면서 3차원 조형물 설계 및 제작기술이 발전하고 있다. 3D 프린터는 새로운 제 품 개발에 필요한 급속조형뿐만 아니라 기존 제품의 역공학, 문화재 등 기존 물체에 대한 복제 및 복원에도 이용된다. 기 존의 물체를 복제하기 위해서는 대상 물체에 대한 3차원 데 이터가 필요한데, 수작업 측정을 통해 일일이 3차원 데이터 를 얻는 것은 매우 힘들며 시간이 많이 걸린다는 문제점이 있다. 따라서 고전적인 수작업 측정 방식을 벗어나 자동화된 방법으로 3차원 데이터를 획득하는 3D 스캐너에 대한 연구 도 활발히 진행되고 있다.
3D 스캐너 기술은 크게 대상 물체에 물리적인 접촉이 이 루어지는 접촉 방식과 접촉이 없이 이루어지는 비 접촉 방식 으로 분류된다. 접촉 방식은 물체의 표면에 접촉하여 물체의 표면 정보를 얻는 방식으로 CMM (Coordinate-Measuring Machine), AFM (Atomic-Force Microscopy) 등이 있다[1,2]. 접촉 방식은 측정할 수 있는 물체의 크기에 대한 제한이 크지만 물체의 표면 정보를 매우 정밀하게 얻어낼 수 있는 장점이 있다. 비 접촉 방식은 보통 빛을 이용하기 때문에 광학식으 로도 불리는데, 이는 다시 수동적인 방식과 능동적인 방식으 로 분류된다[3]. 수동 방식은 스테레오 카메라와 같이 컴퓨터 영상처리를 이용하는 방법으로 두 시점(view point)의 영상을 통해 물체의 거리를 측정하는 방법이다. 능동 방식은 광원을 포함하는 방식으로 빛이 반사되어 돌아오는 체공 시간을 측 정하여 거리를 계산하는 방식(TOF: Time-of-flight)과, 광원과 이격하여 설치된 카메라를 통해 물체에 조사된 광을 탐색하
여 거리를 측정하는 광 삼각법(optical triangulation)이 있다[4].
빛의 체공 시간을 측정하는 방식은 매우 먼 거리까지 측정할 수 있기 때문에 건축물 등의 측정에 사용할 수 있다. 하지만 빛의 체공시간이 매우 짧기 때문에 고사양의 전자회로를 사 용해야 하며, 정밀도 측면에서 성능이 떨어진다. 반면 광 삼 각법의 경우는 가까운 거리의 측정이 용이하고, 정밀도도 높 은 편이다.
광 삼각법에 이용되는 광원으로 과거에는 단순한 격자형 패턴을 많이 사용하였다[5]. 그러나 물체에 의하여 왜곡된 격 자형 패턴을 카메라로 구분하기 어렵다는 문제가 있어서, 근 래에는 부호화된 광 패턴이 사용되기도 한다[6,7]. 광 패턴을 부호화하기 위해서는 일반적으로 비싼 LCD 프로젝터가 사 용되며, 이후의 영상처리가 복잡해지고 계산 시간이 많이 든 다는 문제가 있다.
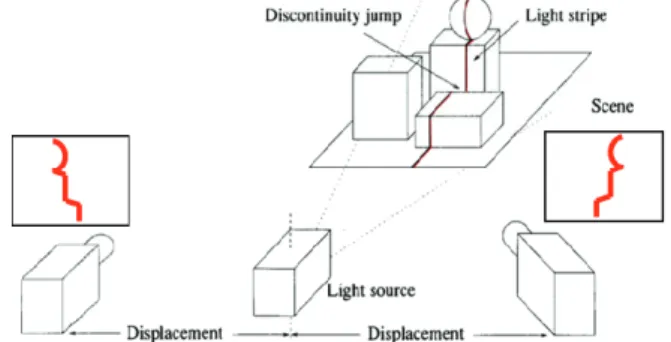
광 삼각법을 이용하여 거리를 측정하는 방법을 그림 1에 나타내었다. 선형 레이저를 수직으로 설치하고, 레이저 광원 과 이격하여 설치된 카메라를 통해 레이저 광을 탐색하여 대 상 물체점의 거리를 획득할 수 있다.
본 논문에서는 비 접촉 방식의 광 삼각법을 이용한 3D 스
Copyright© ICROS 2016
* Corresponding Author
Manuscript received June 8, 2016 / revised August 15, 2016 / accepted August 17, 2016
고영준, 이수영: 서울과학기술대학교 전기정보공학과 ([email protected]/[email protected])
※ 이 연구는 서울과학기술대학교 교내연구비의 지원으로 수행되었음.
그림 1. 선형 레이저 영상 기반 거리측정.
Fig. 1. Distance measurement based on stripe laser image.
고 영 준, 이 수 영 812
캐너 개발에 관해 기술한다. 본 논문의 3D 스캐너는 간단한 선형 레이저 영상 기반의 3차원 데이터 획득 장치로서 선형 레이저 광원과 카메라, 회전 테이블, 위도 방향 회전 팔로 구 성된다. 선형 레이저는 수직 방향으로 조사되며, 대상 물체의 굴곡에 의한 레이저 음영지역 문제를 해소하고 다면 측정을 위해 두 대의 관측 카메라를 사용한다. 여기서 두 대의 카메 라는 일반적인 스테레오 카메라와 같이 대응점 관계를 통해 거리정보를 얻기 위한 것이 아니라 음영지역 해소와 다면 관 측을 위한 것이다.
선형 레이저 영상은 영상처리 과정이 매우 간단하기 때문 에 고가의 카메라를 사용할 필요 없이 간단한 임베디드 영상 처리 프로세서만을 이용하여 모듈화할 수 있으며, 레이저 광 원으로 반도체 레이저 다이오드를 사용함으로써 전체 시스 템을 경제적으로 구축할 수 있다.
II. 3D 스캐너 시스템 구조
본 논문에서 개발한 레이저 영상 기반 3D 스캐너는 그림 2와 같이 대상물을 수평방향으로 회전시키기 위한 모터 구 동 회전테이블과 선형 레이저 광원 및 카메라 모듈로 구성된 다. 획득한 대상물의 3차원 점 데이터를 렌더링하여 대상물 의 표면을 복원하기 위해서 오픈 소스인 매시랩(MeshLab) [8]
을 사용하였다. 매시랩은 일반적으로 사용되는 렌더링 및 3 차원 표면 복원용 CAD 도구이며, CAD 시스템의 표준 인터 페이스 파일을 제공한다. 매시랩을 통해 생성된 표준 인터페 이스 파일은 일반적인 상용 3D 프린터를 구동할 수 있으므 로, 별도의 처리작업 없이 직접 대상물을 복원할 수 있다.
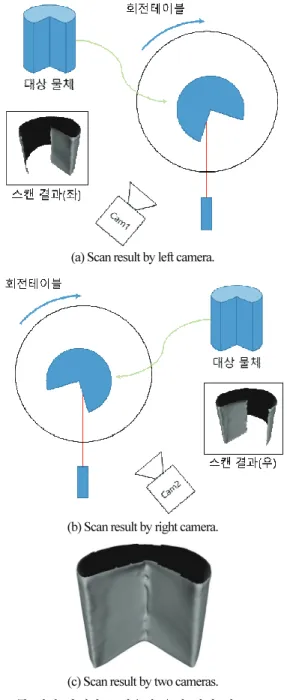
선형 레이저를 이용한 광 삼각법의 특성상 레이저 광이 카 메라에서 관측되지 않는 음영 지역이 발생하게 된다. 음영 지역을 최소화하기 위하여 본 논문에서는 두 대의 카메라를 선형 레이저 양측에 설치하였다. 그림 3은 카메라 두 대를 사용한 음영지역 해소 효과를 보여준다.
부채꼴 기둥 모양의 물체에 대해서 좌측 카메라와 우측 카 메라 각각에서 얻어진 3차원 데이터에는 물체 자체의 굴곡 에 의한 가려짐 때문에 기둥의 한 면에 대하여 스캔하지 못 할 수 있다(그림 3(a), 그림 3(b)). 하지만 두 데이터를 통합할 경우 각각의 카메라에서 얻지 못한 면에 대한 데이터를 서로 보상하여 원래 물체와 같은 완전한 데이터를 얻을 수 있다 (그림 3(c)).
(a) Scan result by left camera.
(b) Scan result by right camera.
(c) Scan result by two cameras.
그림 3. 두 대의 카메라를 이용한 음영 지역 해소.
Fig. 3. Eliminating shadow areas using two cameras.
III. 차 영상 방법을 이용한 레이저 광 영상 추출 선형 레이저 영상으로부터 물체점의 거리를 측정하기 위 해서는 카메라 영상에서 레이저 광 화소를 추출해야 한다.
레이저 광 영상은 주변 조명 잡음의 영향을 받을 수 있고, 이는 거리측정 정밀도에 큰 영향을 줄 수 있다. 이러한 문제 를 해결하기 위해 본 논문에서는 레이저 광 모듈레이션(on- off)에 따라 일련의 두 장의 영상을 얻고, 두 영상간의 차영 상을 통해 레이저 광 화소를 추출하는 방법을 택하였다.
그림 4는 차 영상 방법을 이용하여 레이저 광 화소를 추출 하는 과정을 보여주고 있다. 먼저 레이저 광이 켜진 상태의 영상(그림 4(a))을 얻고, 다시 레이저 광이 꺼진 상태의 영상 (그림 4(b))을 얻은 뒤, 두 영상의 각 화소 별 차(difference)를 구하면 그림 4(c)와 같이 레이저 광 화소만 추출된 영상을 얻 을 수 있다.
그림 2. 선형 레이저 영상 기반 3차원 스캐너 시스템.
Fig. 2. 3D scanner system based on stripe laser image.
Young-Jun Ko and Soo-Yeong Yi
선형 레이저 광 영상기반 다면 3 차원 스캐너 813
(a) Laser-on. (b) Laser-off. (c) Difference image.
그림 4. 차영상법을 이용한 레이저 화소 추출.
Fig. 4. Laser pixel extraction by method of differential image.
IV. 선형 레이저 광 영상기반 거리측정
그림 5는 두 대의 카메라에서 대상물에 수직방향으로 조 사된 선형 레이저 광을 관측한 원영상이다. 카메라의 수직 방향 화각을 넓게 하기 위해 640×480 화소 카메라를 가로 방향으로 설치하였다. 그림 5에서 보는 바와 같이 대상 물체 의 형상에 따라 선형 레이저 광이 카메라 영상에서는 왜곡되 어 나타난다. 그러므로 그림 4(c)와 같은 차영상의 각 행에서 레이저 광 화소를 탐색하여 화소 거리, Pix를 측정하면, 이로 부터 레이저 광이 조사된 대상물체까지의 거리를 계산할 수 있다. 이 과정을 카메라 영상의 모든 640개 행에 대해서 반 복한다.
그림 6은 레이저 광의 화소 위치 측정값, Pi=[Pix Piy]t로 부터 카메라 모듈 좌표계 S 를 기준으로 대상 물체점의 좌 표값, Ps=[Psx Psy Pxz]t을 계산하기 위한 과정을 보여준다.
기하학적 관계에 따라 거리 계산식은 식 (1)과 같이 나타낼 수 있다.
1
2 2
2 2
0
cot ta
1 2
n ix
sx sy
sz iy
ix
d P
P
l P l d b
P H b
P P
φ λ
λ
⎧ − − ⎫+
⎨ ⎛ ⎞⎬
= + = ⎜⎝ ⎟⎠
=
= +
+
⎩ ⎭
⋅ + ⋅
(1)
여기에서 카메라는 이상적인 핀홀 모델로 간주하였으며, l 은 카메라 핀홀로부터 물체점까지의 x 축 방향 거리, d 는 핀홀로부터 영상 카메라 모듈 상의 한 기준점까지의 거리, b 는 카메라와 레이저 광원 사이의 간격, φ 는 카메라 설치
각, λ 는 카메라 렌즈의 초점거리를 나타낸다. 그리고 H 는 일정 거리에서 카메라로 관측할 수 있는 최대 높이를 의미한 다. 거리 계산식 (1)은 두 대의 카메라에 공통적으로 적용되 며, 식의 매개변수 값들 시스템 캘리브레이션 과정을 통해 얻는다.
V. 물체 좌표계 기준 좌표변환
4절에서는 영상면 좌표계 기준의 Pi로부터 카메라 좌표계 기준의 좌표 값, Ps를 계산하는 과정에 대하여 기술하였다. 이 좌표 값은 대상 물체 좌표계 기준 값으로 변환되어야 한다. 본
그림 5. 선형 레이저 영상 샘플.
Fig. 5. Stripe laser image sample.
(a) Horizontal direction.
(b) Vertical direction.
그림 6. 수평/수직 거리 측정.
Fig. 6. Horizontal/vertical distance measurement.
그림 7. 카메라 좌표계로부터 회전테이블 좌표계로 좌표변환.
Fig. 7. Transformation from camera coordinates to rotation table coordinates.
Multi-facet 3D Scanner Based on Stripe Laser Light Image
고 영 준, 이 수 영 814
논문에서는 회전 테이블의 중심점을 대상 물체의 좌표계 기준 점으로 설정하였다. 그림 7은 카메라 기준의 좌표값, Ps로 부 터 회전 테이블 기준의 좌표값, Po=[Pox Poy Poz]t을 구하 는 좌표변환 과정을 보여준다. 좌표변환 식과 동차변환행렬 은 식 (2)와 같다.
2 2 1 1
o T R s
P =R T⋅P (2)
여기서 각 단계의 변환 행렬은 다음과 같다.
1
1 0 0 0 1 0 0 0 0 1 , 0 0 0 1
L
T B
⎡ − ⎤
⎢ ⎥
⎢ ⎥
=⎢ ⎥
⎢ ⎥
⎢ ⎥
⎣ ⎦
2
1 0 0 0 0 1 0 0 0 0 1 0 0 0 1
T A
⎡ ⎤
⎢ ⎥
⎢ ⎥
=⎢ ⎥
⎢ ⎥
⎢ ⎥
⎣ ⎦
(3)
1
cos 0 sin 0
0 1 0 0
sin 0 cos 0 ,
0 0 0 1
R
ψ ψ
ψ ψ
⎡ ⎤
⎢ ⎥
⎢ ⎥
=⎢− ⎥
⎢ ⎥
⎢ ⎥
⎣ ⎦
2
cos sin 0 0 sin cos 0 0
0 0 1 0
0 0 0 1
R
θ θ
θ θ
− −
⎡ ⎤
⎢ − ⎥
⎢ ⎥
=⎢ ⎥
⎢ ⎥
⎢ ⎥
⎣ ⎦
위 식에서 ,A B 및 L 은 설계시에 결정되는 상수이며, θ 와 ψ 는 각각 수평 회전테이블의 회전각, 위도 방향 팔의 회 전각도를 나타내는 변수이다.
VI. 실험결과 1. 3D 스캐너 개발
그림 8과 그림 9는 본 논문에서 개발한 선형 레이저 영상 카메라 모듈과 전체적인 3D 스캐너 시스템이다. 레이저 광원 으로 660nm 파장을 갖는 선형 적색 반도체 레이저 다이오드 를 사용하였으며 카메라는 ㈜위드로봇에서 개발한 SMART_I 임베디드 카메라 모듈을 사용하였다[9]. SMART_I 카메라의
사양은 다음과 같다.
- Micron사의 CMOS MT9M111 영상센서, 640x480 해상도 - Samsung S3C6410X ARM 1176JZF-S CPU, 128MB RAM,
256MB Flash
- 30fps의 영상획득 속도
- USB 2.0 및 UART 직렬통신채널
SMART_I 카메라는 임베디드 영상처리 프로세스를 가지고 있기 때문에 자체적으로 영상처리가 가능하며, 처리결과만을 UART 통신을 통해 외부 PC로 전달한다. 회전 테이블은 스 텝모터를 이용하여 0.15° 단위로 회전 구동된다.
그림 7에서 3D 스캐너의 기구부의 설계 상수 A B 및 L, 의 값은 표 1과 같이 설정하였다.
2. 거리 측정 캘리브레이션
식 (1)을 통해 거리를 계산하기 위해서는 매개변수 b ,,φ ,
λ d 및 H 값들이 필요하다. 이들 매개변수의 근사값은 시스템 설계단계에서 주어지지만, 보다 정확한 거리 측정을 위해서 캘리브레이션 과정을 통해 이 값들을 다시 얻어야 한 다. 카메라 자체의 매개변수들을 추정하는 방법들은 이미 많 이 연구되어 왔으며 매트랩에도 쉽게 이용할 수 있는 카메라 캘리브레이션 툴박스가 있다[10,11]. 레이저 광 영상 기반의 거리계산에는 카메라 자체의 매개변수 외에 스캐너 시스템 의 기구적 매개변수들이 포함되므로 이들 매개변수를 동시 에 추정하는 방법이 필요하다. 본 논문에서는 거리를 미리 알고 있는 대상물체와 레이저 광 관측 영상의 관계로부터 거 리계산식의 매개변수들을 곡선보정(curve interpolation) 과정을 통해 직접 역산하는 캘리브레이션 방법을 택하였다. 캘리브 레이션 과정에는 화소거리 계산의 기준이 되는 영상면의 중 심과 카메라 렌즈의 실제 광축 중심과의 오차를 반영하여 식 (4)와 같이 거리계산식을 설정하였다.
tan 1
cot ix
sx P
P b p d
φ λ
⎧ − ⎛ + ⎞⎫
= ⎨⎩ − ⎜⎝ Δ ⎟⎠⎬⎭+ (4)
실제 거리를 알고 있는 위치 Psx에서 레이저 광 관측 영상 의 화소거리를 Pix라고 하면 곡선보정을 위한 제곱오차식은 다음과 같다:
2 1
2 1
1 cot tan
N n n
N ixn
n sxn
e E
b φ P p d P
λ
=
−
=
=
⎡ ⎧⎨ ⎛ + ⎞ + −⎫⎬ ⎤
⎢ ⎜⎝ ⎟ ⎥
Δ
⎩ ⎠⎭
⎣ ⎦
= −
∑
∑
(5)
여기서 아래첨자 n 은 데이터의 개수를 의미한다. 그림 10는 실제거리 230 ~ 300mm 사이에서 5mm간격으로 레이저 광 카 메라 모듈을 이동하면서 획득한 총 15장 실험영상들 중의 일 부다. 영상의 가로축은 480 화소이며 중심축(240번째 화소)을 기준으로 실제거리에 따른 화소거리를 표 2에 정리하였다.
표 2은 영상의 첫번째 행에 관한 데이터이며, 렌즈 왜곡에 그림 8. 선형 레이저 카메라 모듈.
Fig. 8. Stripe laser camera module.
그림 9. 선형 레이저 영상 기반 3D 스캐너.
Fig. 9. 3D scanner based on stripe laser image.
표 1. 설계 상수 값.
Table 1. Design parameters (mm).
A B L
8.5 15.5 300.0
선형 레이저 광 영상기반 다면 3 차원 스캐너 815
의해 640개의 각 행에서 화소거리가 다를 수 있기 때문에 모 든 행에 대해서 최소제곱법 기반 매개변수 추정 방법을 적용 하였다.
식 (5)에 대해서 그래디언트(gradient) 탐색법에 의한 매개 변수 추정은 다음 식으로 나타낼 수 있다:
1
1
,
, 1, 2,
k k E
k k a
E E E E E
b d p
E
a E k
a E
a
λ φ
+
+
⎛∂ ∂ ∂ ∂ ∂ ⎞
Δ ⋅⎜⎝∂ +∂ +∂ +∂ +∂Δ ⎟⎠ Δ ∂
= ⋅ =
∂
= −
− …
(6)
여기서 a 는 각 매개변수, b,λ φ, ,d, pΔ 를 나타내며, k 는 반복횟수를 의미한다. 그리고 Δ 와 E Δ 는 그래디언트 탐색a
의 스텝크기를 나타낸다. 식 (6)에 필요한 매개변수 별 그래 디언트는 식 (7)과 같다:
( )
2 1
1
1
2 tan
co an
co
t t
N t
ixn sxn
n
ixn
E P
b p d P
b
p P
φ λ
φ λ
−
=
−
∂ = − Δ
∂
⎧ ⎛ + ⎞ + − ⎫
⎨ ⎜⎝ ⎟⎠ ⎬
⎩ ⎭
⎛ +Δ ⎞
⋅ ⎜⎝ − ⎟⎠
∑
( )
2 1
1
2N cot tan ixn sxn
n
b P d
E
d p P
φ λ
−
=
⎧ ⎛ + ⎞ + − ⎫
⎨ ⎜⎝ ⎟⎠ ⎬
⎩ ⎭
∂ = − Δ
∂
∑
( )
2 1
1
2 1
2 tan
si an
co
n t
N t
ixn sxn
n
ixn
E p
b
P
p
b d P
P
φ φ λ
φ λ
−
=
−
∂ = − − Δ
∂
⋅
⎧ ⎛ + ⎞ + − ⎫
⎨ ⎜⎝ ⎟⎠ ⎬
⎩ ⎭
⎛ − +Δ ⎞
⎜ ⎟
⎝ ⎠
∑
( )
( )
2 1
1
2 2
2 1
2 tan
sin ta cot
n
N ixn
n sxn
ixn
ixn ixn
E p
b P p
p
b d P
P P
P p
λ φ λ
φ λ
λ
−
=
−
∂ = − − Δ
∂
⋅ ⋅ Δ
Δ Δ
−
⎧ ⎛ + ⎞ + − ⎫
⎨ ⎜⎝ ⎟⎠ ⎬
⎩ ⎭
+
⎛ + ⎞ + +
⎜ ⎟
⎝ ⎠
∑
( )
( )
2 1
1
2 2
2 1
2 tan
sin tan
N cot
ixn sxn
n
ixn ixn
b P d
E p
p
b
p P
P
P p
φ λ
λ φ λ
λ
−
=
−
⎧ ⎛ + ⎞ + − ⎫
⎨ ⎜⎝ ⎟⎠ ⎬
⎩ ⎭
∂ = − Δ
∂Δ
⋅ ⎛ + ⎞ + +
⎜ Δ
⎟
⋅ Δ
⎝ − ⎠
∑
(7)
표 3는 그래디언트 탐색과정에서 얻은 각 매개변수들의 수렴값이다.
표 3에서 카메라 렌즈의 초점거리를 나타내는 λ 의 값은 영상의 1 화소를 1mm로 나타냈을 때의 상대적인 크기를 의 미한다. 그림 11은 표 2의 실험데이터에 대해서 최소제곱법 에 의해 얻은 매개변수 수렴값(표 3)을 적용한 곡선보정 결 과 그래프이다. 그래프의 수평축은 화소거리 P ixn, 그리고 수 직축은 실제거리 P 을 나타낸다. 실험 데이터들에 대한 거sxn
리계산의 RMS(Root Mean Square) 오차 크기는 0.16mm이다.
식 (1)의 세번째 식 계산에 필요한 매개변수 H 는 D = 300mm 의 위치에서 카메라 영상으로 관측 가능한 최대 높 이로서 H =73.0mm이 관측되었다. 그러므로 렌즈의 수직 화각은 약 2tan1 73.0/ 2
300 9
.0 13.
− ⎛ ⎞
⎜ ⎟
⎝ ⎠≈ ° 에 해당한다(그림 6(b)).
3. 3차원 데이터 획득
그림 12는 실제 대상 물체에 대해서 본 논문에서 개발한 3D 스캐너를 통해 획득한 3차원 점 데이터 집합(point cloud) 과 이들을 매시랩 CAD 도구를 이용하여 표면 복원한 결과 이다. 대상물의 수평방향 전 영역을 0.15° 단위로 스캔하였다.
매시랩은 점 데이터 집합의 각 점에서 주변점들과의 상관관 계에 따라 법선 벡터를 생성하고, Poisson 표면 복원 알고리 즘[12]을 사용하여 면을 형성함으로써 표면을 복원한다. 스캔 을 통해 점 데이터를 얻어내지 못한 공간, 즉 구멍(hole)들이 존재하는 경우에는 보간을 통해 구멍들을 메꾼 waterproof 3D (a) P = 230mm. sx (b) P = 300mm. sx
그림 10. 매개변수 캘리브레이션을 위한 선형 레이저 영상.
Fig. 10. Stripe laser image for parameter calibration.
표 2. 캘리브레이션 실험 데이터: 선형레이저 영상 첫번 째 행.
Table 2. Experimental data for calibration: First row of stripe laser image.
1
n = … n =15
P (실제거리, mm) sxn 230 300
P (화소거리) ixn 50 -195
표 3. 매개변수 수렴 값: 선형 레이저 영상의 첫번째 행.
Table 3. Convergent values of parameters: First row of stripe laser image.
b d φ λ Δ p
값 109.82mm 87.10mm -34.17° 1372mm 29.02mm
그림 11. 거리계산식 곡선보정 그래프.
Fig. 11. Curve interpolation graph for distance computation equation.
고 영 준, 이 수 영 816
모델을 생성한다. waterproof 3D 모델은 기존 3D 프린터를 이 용하여 직접 복제가 가능하다.
VII. 결론
본 논문에서는 대상물의 3차원 데이터를 선형 레이저 영 상을 통해 자동화된 방법으로 획득할 수 있는 3D 스캐너를 개발하였고, 실험을 통해 성능을 확인하였다. 실험결과로서 300mm 거리에서 100mm의 형상 굴곡을 갖는 대상 물체에 대해 0.2mm 이하의 측정오차를 갖는다. 이는 기존의 3D 스 캐너 제품과 비교할 때 상대적으로 정밀한 성능이다.
MakerBot사의 3D 스캐너의 오차는 0.5mm이고, CES 2015에서 신기술상(Innovation award)을 수상한 Matter & Form사에서 개 발한 제품인 Photon은 0.25mm의 측정 오차를 갖는다[13,14].
본 3D 스캐너는 LCD 프로젝터가 필요한 복잡한 구조광 대 신 간단한 선형 레이저 구조광을 이용하고, 간단한 임베디드 카메라를 사용하므로 경제적이고 영상처리가 간단하며 비교 적 정밀한 성능을 갖기 때문에 기존의 3D 스캐너에 비해 우 수하다. 기존의 레이저 구조광 영상기반의 스캐너[15]와는 달 리 두 대의 카메라를 광원의 양측으로 사용함으로써 표면 굴 곡이 큰 형상을 갖는 대상 물체에 대해서 음영지역을 해소할 수 있으며, 위도 방향 회전 기능을 더하고, 이에 대한 좌표 변환 계산을 적용함으로써 물체의 모든 면을 스캔할 수 있는 장점이 있다.
REFERENCES
[1] D. Flack, “Good practice guide no. 43 CMM probing,” National Physical Laboratory, pp. 6-11, 2014
[2] J. Gu and D. Kim, “Measurement of weak forces in atomic force
microscopy,” Journal of the Korean Society of Precision Engineering, vol. 19, no. 3, 2002.
[3] C. Chu, J. Bak, H. Kim, J. Bak, and S. Lim, “Recent trends of 3D reconstruction technology,” Electronics and Telecommuni- cations Trends, vol. 22, no. 4, 2007.
[4] S. Baek and S. Bak, “Shape measurement by using opical triangulation,” Journal of the Korean Society of Precision Engineering, vol. 22, no. 4, 2005.
[5] R. Jain, R. Kasturi, B. G. Schunck, Machine Vision, McGraw- Hill, 1995.
[6] J. Posdamer and M. Altschuler, “Surface measurement by space- encoded projected beam system,” Computer Graphics and Image Processing, vol. 18, pp. 1-17, 1982.
[7] D. Scharstein and R. Szeliski, “High accuracy stereo depth maps using structured light,” Proceedings of IEEE Computer Society Conference on Computer Vision and Pattern Recognition, pp.
195-202, 2003.
[8] P. Cignoni, M. Callieri, M. Corsini, M. Dellenpiane, F. Ganovelli, and G. Ranzuglia, “Meshlab: An open-source mesh processing tool,” Eurographics Italian Chapter Conference, pp. 129-136, 2008.
[9] http://withrobot.com/.
[10] S. Zhang and P. Huang, “Novel method for structured light system calibration,” Optical Engineering, vol. 45, no. 8, pp.
083601-083608, 2006.
[11] http://www.vision.caltech.edu/bouguetj/calib_doc/.
[12] M. Kazhdan, M. Bolitho, and H. Hoppe, “Poisson surface reconstruction,” Eurographics Symposium on Geometry Processing, 2006.
[13] http://store.makerbot.com/digitizer.html.
[14] https://matterandform.net/scanner.
[15] Y. Ko, S. Yi, and J. Lee, “Development of 3D scanner based on laser structured-light image,” Journal of Institute of Control, Robotics and Systems, vol. 22, no. 3, pp. 186-191, 2016.
고 영 준
2016년 2월 서울과학기술대학교 전기정 복공학과(공학사). 2016년 3월~현재 서 울과학기술대학교 석사과정 재학 중.
관심분야는 로봇비젼 이동로봇.
이 수 영
1988년 2월 연세대학교 전자공학과(공 학사). 1990년 2월 KAIST 전기및전자공 학과(공학석사). 1994년 8월 KAIST 전기 및전자공학과(공학박사). 1995년 3월
~1999년 8월 KIST 시스템연구부 선임 연구원. 1997년 2월~1998년 2월 Univ. of Southern California 박사후과정. 1999년 9월~2007년 2월 전북대 학교 전자정보공학부 부교수. 2005년 6월~2006년 8월 Univ. of Illinois at Urbana-Champaign 방문교수. 2007년 3월~현재 서울과 학기술대학교 전기정보공학과 교수. 관심분야는 보행로봇, 로봇비젼, 이동로봇.
(a) Scan object. (b) 3D point cloud data.
(c) Surface reconstruction.
그림 12. 3D 스캔 결과.
Fig. 12. 3D scanning result.
Young-Jun Ko and Soo-Yeong Yi