전방향성 선형 압전 액추에이터의 설계와 분석
정우석·강종윤·김정도
*
·백동수**
·조봉희***
·김영호***
·윤석진†
Design and analysis of omni-directional linear piezoelectric actuator
Woo-Suk Jung, Chong-Yun Kang, Jeong-Do Kim
*
, Dong-Soo Paik**
, Bong-Hee Cho***
Young-Ho Kim***,
and Seok-jin Yoon†
Abstract
In this paper, we present design and analysis of the omni-directional linear piezoelectric actuator which was consisted of one actuator using the half-wave vibrator. Through calculating vibration speeds on each sector of the actuator, the displacement of contact point of the actuator is theoretically confirmed to be about 33 nm. To confirm an applicable possibility of omni-directional linear piezoelectric actuator, elliptical motion for linear movement, displacement of the tip, changing directions and admittance characteristics are simulated by ATILA. Compared with theoretical result, we obtained similar data with displacement of 32.5 nm at contact point. And then the actuator is simulated elliptical trajectories for linear motions and changing directions according to combination of input signal.
Key Words : piezoelectric, actuator, ATILA, linear actuator, half-wave vibrator, vibration speed
1. 서 론
최근 산업의 발달로 액추에이터의 발전이 급격히 이 루어지고 있고 정밀 액추에이터 및 이를 이용한 스테 이지의 개발도 많은 곳에서 이루어지고 있다. 현재 산 업용 모터는 전자기식 모터로 높은 소비전력, 전자기적 잡음, 크기 등으로 인해 사용에 제약을 가진다. 초음파 모터는 기존의 전자기식 모터와는 원리, 구조, 특성 그 리고 구동 방식 등이 완전히 다르고 저속에서의 높은 토크, 빠른 응답특성, 소형화, 전자유도 장애가 전혀 없 는 특성을 가지며 구조가 간단하여 스테이지 및 소형 화 로봇 등의 구동에 응용이 가능하다. 하지만 기존에 개발된 대부분의 액추에이터들은 단일 자유도를 가지 고 다자유도를 갖는 시스템은 여러 개의 액추에이터를 사용하여야 하므로 시스템이 복잡해지고 제어가 어려 워지는 단점을 가진다 [1-4] .
따라서, 본 논문에서는 반파장 진동자를 이용하고 하나의 액추에이터를 사용한 전방향성 액추에이터의 원리, 분석 및 모델링 등에 대해서 다루고자 한다.
2. 원리와 구조
선형 초음파 모터는 굴곡파에 의해 발생된 진행파로 구동하는 방법과 종진동과 횡진동을 액추에이터를 결합 하여 수직과 수평운동을 반복적으로 발생시켜 이동자를 구동하는 정재파형 방법이 알려져 있다. 또한 한 점 또 는 두 점 이상이 이동자와 접촉하고 있고 접촉부에서의 다양한 진동을 통해 이동자를 움직이게 하는 방법으로 나눌 수 있다. 제안된 전방향성 선형 압전 모터는 이동 자와 액추에이터의 한 부분이 접촉과 마찰을 통해 선형 운동을 하는 모터이며 접촉 부위에서의 타원 운동을 함 으로써 이동자가 선형 운동을 가능하게 한다. [5-9]
2.1. 반파장 진동자
설계된 반파장 진동자는 란쥬반(langevin) 진동자 2 개를 탄성체 사이에 넣어 볼트로 결합한 구조로 Fig. 1 과 같고 λ/2 모드로 동작을 하면 압전 세라믹스에서 발생하는 종방향 진동이 혼의 끝에서 약 5~10배 확대
한국과학기술연구원(KIST)
*호서대학교(Hoseo University)
**고려대학교(Korea University)
***수원대학교(Suwon University)
†Corresponding author: [email protected]
(Received : January 16, 2009, Revised : March 13, 2009 Accepted : March 17, 2009)
된다 . 또한 , 란쥬반 진동자와 동일한 λ /4 길이의 혼을
연결하면 혼의 위 , 아래 단면적의 비율만큼 진동이 증 폭되며 동작 주파수가 1/2 로 감소하고 발생력이 증가 하며 진동속도는 감소되는 특징을 갖는다 .
반파장 진동자의 변위를 알기 위해서는 역계수 A,
기계 임피던스 Z, 등가 기계저항 r 등을 이용하여 압전 세라믹스의 기계적 진동을 확인해야 한다 . 역계수의 계
산은 다음 식 (1) 과 같다 . [7-10]
(1)
여기서 , d , e 33 , S c , υ 2 , υ 0 는 각각 압전 세라믹스의 두 께 , 압전 응력정수 , 1 개의 압전 세라믹스 판의 단면적 , D 면에서의 진동속도 , A 면에서의 진동속도를 나타낸다 .
또한 Fig. 1 에서 나타난 것처럼 A-F 까지의 각 부분에
서의 진동 속도를 알아야 하고 A-B 구간에서의 진동
속도는 다음 식 (2) 과 같다 .
(2)
여기서 , k 1 은 A-B 구간의 파장 정수이고 , l 은 A-B
구간의 길이 , υ 1 은 B 면에서 발생되는 진동속도를 나타
낸다 . 따라서 두 번째 C-D 구간의 진동 속도 분포 υ 2
는 다음 식 (3) 과 같이 나타낸다 .
(3)
여기서 , Z 1 = S 1 ρ 1 c 1 와 Z 2 = S 2 ρ 2 c 2 는 각각 A-B 구간 그
리고 C-D 구간의 파동 임피던스를 나타내고 S , ρ , c 는 각각 단면적 , 재료의 밀도 , 파장의 속도를 나타내며
k 2 = ω / c 2 =2 π f / c 2 는 C-D 구간의 종파의 파장 정수를 나
타낸다 .
세 번째 E-F 구간의 진동속도분포 υ 3 는 다음 식 (4)
으로 표현된다 .
(4)
이다 .
진동자의 기계공진 주파수 f 0 =60 kH Z 라고 하면 각
구간에서의 재료의 밀도 ρ , 종파의 속도 c , 단면적 S ,
파동임피던스 Z, 파장정수 k 은 Table 1 과 같이 정리되 어 질 수 있다 .
지금까지 계산된 수치를 식 (1) 에 적용하면 진동자의
역계수 A 1 은 0.904 N / V 가 된다 . 횡효과를 갖는 종진동 자의 진동력 평형식에서 공진 주파수에서의 진동속도 υ 0 는 다음 식 (5) 와 같다 [7,9-10] .
υ 0 = A 1 V / r 0 (5)
따라서 A 1 =0.904 N / V 와 현재 실용화 된 진동자의
r 0 =50 N / m / s 를 대입하고 액추에이터에 인가되는 실효 전압이 V=1 라고 하면 진동속도는 0.18 m / s 이 되고 공
진 주파수 f 0 =60 kHz 이므로 실제 진동자의 변위 ξ 0 는 다음 식 (6) 을 이용하여 계산되어 진다 .
(6)
따라서 공진 영역에서 정현파 입력시 90 o 와 270 o 최
대 진폭을 가질 때 진동자의 최대 변위는 약 33 nm 를
갖는 반파장 진동자이다 .
2.2. 구 조
Fig. 2 와 같이 혼을 원뿔 형태의 구조로 설계하였으
며 압전 세라믹스의 단일화 및 구조의 통합으로 일정 한 진동의 생성이 가능하도록 하나의 압전 세라믹스에 네 개의 전극을 분리하였다 . 그리고 란쥬반 진동자와 탄성체를 볼트로 결합한 반파장 진동자와 원뿔 형태의 혼 위에 이동자와의 접촉부인 알루미나 팁이 있다 . 알 루미나 팁은 마찰에 따른 마모현상을 줄이기 위하여 사용되었고 이 팁에서의 타원운동을 통하여 이동자의 선형운동을 가능하게 한다 . 설계된 전방향성 선형 압전 액추에이터의 높이는 약 50 mm, 직경은 20 mm 이고
액추에이터의 가운데에는 압전 세라믹스 두 개가 삽입 되어 있다 .
A
1= 1 ⁄ d e ⋅ ⋅ ⋅
33S
cυ
2⁄ υ
0υ
1= υ
0cos l k
11υ
2= υ
0cos x k
2 2{ cos x k
1 1– ( Z
1⁄ Z
2) sin k
1l
1⋅ tan k
2x
2}
υ
3= υ
2cos x k
3 3[ 1 – ( Z
2⁄ Z
3) ⋅
k
1l
2+ ( Z
1⁄ Z
2) k
1l
1{ } ⋅ tan k
3x
3]
tan
ξ
0= υ
0⁄ ω
0⁄ 2 = 0.033 10 ×
–6Fig. 1. Structure of langevin vibrator and horn.
압전 세라믹스를 동일한 크기로 분할한 4 개의 전극
과 액추에이터 구동을 위한 입력신호를 보여준다 . 이 전방향성 액추에이터의 구동은 두개의 전극에 정현파 를 인가하고 나머지 두 개의 전극에는 여현파를 인가 하여 구동되며 두 개의 정현파와 두 개의 여현파의 조 합을 통하여 x, -x, y, 그리고 -y 방향으로 구동할 수
있다 .
3. 실험 및 고찰
본 연구에서는 유한요소법 (finite element method : FEM) 을 이용한 시뮬레이션 프로그램 ATILA(Adapt- ronics Inc., US) 를 이용하였고 조화 분석 (harmonic
analysis) 을 통해 액추에이터의 공진주파수와 어드미턴
스 특성 , 공진 모드에 따른 변위량을 분석하였다 . [11-12]
Fig. 3 은 40~100 kHz 까지의 조화 분석을 통한 어드미 턴스 특성과 공진 영역에서의 움직임을 보여준다 .
Fig. 2 에서와 같이 4 개의 전극 중 두 개의 전극에는
1 볼트의 사인파를 나머지 2 개의 전극은 1 볼트의 코사
인파를 입력으로 하였으며 각 공진 영역에서 알루미나 팁의 움직임을 확인하였다 . 이론적인 결과와 비슷하게
62.2 kHz 에서의 변위는 약 32.5 nm 의 결과를 얻었다 .
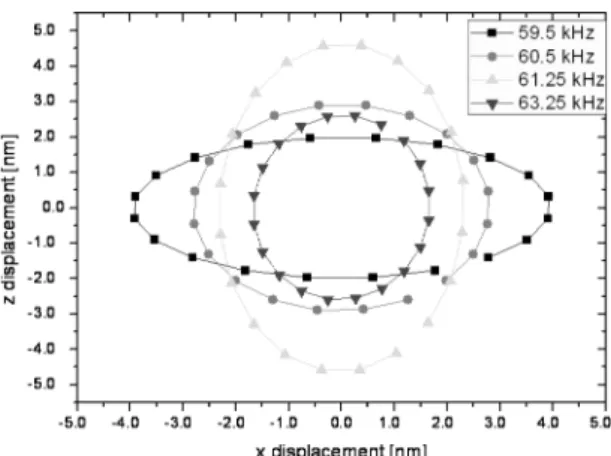
그러나 각 공진영역에서는 횡진동이나 종진동 운동만 을 보였으며 선형운동을 위해서는 타원 운동이 필요하 다 . 따라서 종진동과 횡진동 사이에서의 주파수들인 59.5, 60.5, 61. 25, 그리고 63.25 kHz 에서 시뮬레이션 하였고 그 결과는 Fig. 4 와 같다 .
이론적 결과와 같이 종진동과 횡진동 사이 주파수들
은 최대 5 nm 정도의 타원 운동을 얻었다 . 마지막으로
액추에이터의 전방향성을 확인하기 위하여 Fig. 5 와 같 은 입력 신호의 조합에 따른 액추에이터의 방향 전환 을 확인하였다 . Fig. 5(a) 는 Fig. 3 의 압전 세라믹스에 보여준 것과 같이 입력신호가 인가되었을 때의 결과로
x 와 z 방향의 변위만을 가지며 Fig. 5(b) 는 사인신호를
위쪽으로 코사인 신호를 아래의 전극에 입력하였을 때 의 결과로 y 와 z 방향의 변위만을 갖는다 .
따라서 , 본 논문에서 제안된 전방향성 액추에이터는 Fig. 3. Results of admittance analysis and movement of
resonant frequencies.
Fig. 2. Structure of omni-directional linear piezoelectric actuator and electrodes on PZT.
Fig. 4. Elliptical trajectories at frequencies between transverse and longitudinal motion.
Fig. 5. Results of direction change according to com-
bination of input signals; (a) yz-plane displacement
for moving along yaxis, (b) zx-plane displacement
for moving along x axis.
동 방정식과 설계된 반파장 진동자의 구간별 진동 속
도 등을 계산하여 이동자와 접촉부인 팁에서 약 33 nm
의 변위를 확인하였다 .
설계된 액추에이터를 압전 전용 시뮬레이션 툴인
ATILA 를 이용하여 주파수에 따른 어드미턴스 특성을
확인하였고 공진영역에서 종진동 또는 횡진동을 하였
으며 이때의 변위는 32.5 nm 로 이론적 계산 결과와 거
의 일치하였다 . 그러나 제안된 액추에이터의 선형운동 을 위해서는 접촉부에서의 타원 운동이 요구되기 때문 에 종진동과 횡진동 사이의 주파수에서 시뮬레이션 하
였으며 최대 변위 5 nm 의 타원 운동을 확인하였다 . 또
한 , 압전체의 전극들에 사인파와 코사인파를 조합하여 인가함으로써 원하는 방향으로 제어가 가능하였다 .
참고 문헌
[1] D. Mazeika, P. Vasiljev, G. Kulvietis, and J. Tiskev- icius, “Development of new type linear piezoelec- tric actuator using traveling wave”, 5th Interna- tional Workshop on Piezoelectric Materials and Application in Actuators, 2008.
[5] 김정순 , 김무준 , 하강렬 , “ 압전 횡효과를 이용한 무지 향성 주파수가변 초음파트랜스듀서 ”, 센서학회지 , 제
13 권 , 제 6 호 , pp. 417-423, 2004.
[6] S. Ueha and Y. Tomikawa, Ulrasonic Motors - The- ory and Applications , 1993.
[7] T. Sashida and T. kenjo, An Introduction to ultrasonic motors , Oxford, U.K. : Clarendon, pp. 6-8, 1993.
[8] Kenji Uchino, Piezoelectric Actuators and Ultra- sonic Motors , pp. 154-196, 1997.
[9] Kenji Uchino, 압전 · 전왜세라믹스 - 원리와 응용 실 례 -, 1985.
[10] E, Zauderr, Partial Differential Equations of Applied Mathmatics , New York wiley, 1989.
[11] E. heinonen, J. Juuti, and S. Leppavuori, “Charac- terization and modelling of 3D piezoelectric ceramic structures with ATILA software”, J. Euro- pean Ceramic Society, vol. 25, no. 12, pp. 2467- 2470, 2005.
[12] 고현필 , 강종윤 , 윤석진 , “ATILA 를 이용한 소형 선 형 압전 모터의 설계 ”, 전기전자재료학회지 , 제 18 권 ,
제 12 호 , pp. 18-26, 2005.
정 우 석
• 2009
년 호서대학교 전자공학과 졸업
(공 학박사
)• 2007
년
~2009년 한국과학기술연구원 학 생 연구원
• 2009
년
~현재 한국과학기술연구원 인턴
•
연구원 주관심분야
:초음파 액추에이터 및 구동 드라이버 개발
,센서 네트웍
,에너지 하
베스팅
강 종 윤
• 2000
년 연세대학교 전기컴퓨터공학과 졸 업
(공학박사
)• 2002
년
~2004년
The University of Birmingham, Post-doc.• 2000
년
~현재 한국과학기술연구원 박막 재료연구센터 책임연구원
•