3축 힘센서를 이용한 구물체 잡기 손가락 힘측정시스템 개발
김현민·김갑순
†
Development of finger-force measuring system with three-axis force sensor for measuring a spherical-object grasping force
Hyeon-Min Kim and Gab-Soon Kim †
Abstract
Stroke patients can ’ t use their hands because of the paralysis of their fingers. Their fingers are recovered by rehabilitating training, and the rehabilitating extent can be judged by grasping a spherical object. At present, the object used in hospital is only a spherical object, and can ’ t measure the force of fingers. Therefore, doctors judge the rehabilitating extent by touching and watching at their fingers. So, the spherical object measuring system which can measure the force of their fingers should be developed. In this paper, the finger-force measuring system with a three-axis force sensor which can measure the spherical-object grasping force is developed. The three-axis force sensor is designed and fabricated, and the force measuring device is designed and manufactured using DSP(digital signal processing). Also, the grasping force test of men is performed using the developed finger-force measuring system, it was confirmed that the average force of men was about 120 N.
Key Words : three-axis force sensor, interference error, finger rehabilitation, rehabilitating instrument, spherical object prehension
1. 서 론
뇌졸증환자와 같이 손가락이 마비되어 정상적으로 움직이지 못하는 사람이 급속히 증가하는 추세이다. 이 들의 손가락들은 재활훈련을 통해 일부는 회복되고 재 활정도를 파악하기 위한 하나의 방법으로 구물체잡기 를 실시한다. 현재 병원에서 구물체로 사용되는 것은 단지 플라스틱으로된 구물체이고, 잡는 힘을 측정할 수 있는 장치가 내장되어 있지 않다. 그러므로 의사는 손 가락으로 구물체를 잡는지만 눈으로 확인하여 재활정 도를 대략적으로 판단한다. 즉 구물체를 어느 정도 힘 으로 잡는지를 확인할 수 없으므로 정확하게 판단할 수 없다. 현재, 손가락 재활정도를 측정하는 장치는 논
문 [1,2] 에서 나타낸 것과 같이 구형이 아닌 두 손가락으
로 눌러서 잡을 수 있는 것이 있으며, 이 속에 내장된 센서는 일방향 힘센서이다.
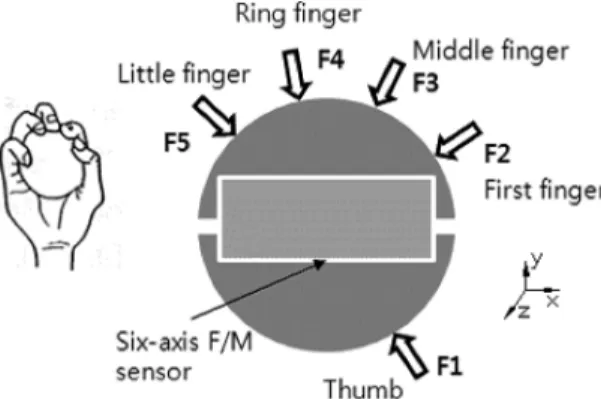
구물체 잡기를 통해 환자의 손가락 재활정도를 판단 하기 위해서는 5개 손가락이 가해지는 방향을 정확하 게 알 수 없기 때문에 x, y, z의 3방향의 힘을 모두 측 정해야한다. 전체 힘 F는 x방향의 힘 Fx, y방향의 힘 Fy, z방향의 힘 Fz 합력으로 계산해야 한다. 이와 같이 구물체 잡기를 통해 손가락의 재활정도를 판단하기 위 한 구물체 잡기 힘 측정장치는 첫째, 힘 Fx, Fy, Fz를 동시에 측정할 수 있는 3축 힘센서가 필요하고, 둘째는 3개의 힘을 빠른 속도로 측정하고 잡는 전체 힘을 계산 할 수 있는 고속 측정기가 필요하다. 구물체에 내장될 수 있는 3축 힘센서는 크기가 작아야 하고, 용량이 잡 는 힘을 측정할 수 있을 정도이어야 하며, 매우 가벼워 야 한다. 또한 센서의 가격이 저가이어야 한다. 그러나 현재 개발된 3방향의 힘을 측정할 수 있는 센서 [3-5] 는 1개의 가격이 약 5백만원 정도이고, 크기 등의 모든 조 건을 만족시키지 못해 구물체 잡기 힘 측정장치에 활 용하기에 적합하지 않다.
경상대학교제어계측공학과
(Gyeongsang National University, Department of Control & Instrumentation Engineering, ERI)
†