The Design and Implementation of Dog Loss Prevention Device Combining Wireless Communication and GPS Technology
1)
전체 글
1)
수치
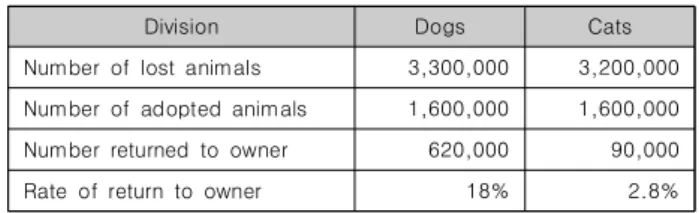
![Table 2에서 보인 바와 같이 반려 동물의 증가는 반려 동물 의 분실과 연관되고, 반려 동물의 분실은 Pet 위치추적(GPS) 시장의 성장으로 연결되고 있음을 확인할 수 있다[2].](https://thumb-ap.123doks.com/thumbv2/123dokinfo/5314966.384035/2.892.91.439.1056.1166/동물의-증가는-분실과-연관되고-동물의-위치추적-성장으로-연결되고.webp)

관련 문서
Professor, Department of Civil Engineering, Gangneung-Wonju National University, Gangneung, South Korea 2 Professor, Department of Civil Engineering, ERI, Gyeongsang
Lee is currently a Professor in the Department of Computer Science and Engineering at Korea National Defense University, Nonsan, Korea, from 2006. He
In 2018, he joined the assistant professor of Department of Computer Software Engineering, Changshin University. His research interests include operating system, new
D degree in department of telecommunication and information engineering from Hankuk Aviation University, south Korea, in 2004. Kim joined the faculty of the
Hong joined the Department of Computer Communication and Engineering at Kangwon National University, Kangwon, Korea, in 2016. She is currently a student in
Jang joined the Instructor of the Department of Computer Information Engineering at Kunsan National University, Kunsan, Korea, in 2008. He is currently a Instructor in
She is currently in the master’s course in the Department of Computer Education at Korea National University of Education, Cheongju, Korea. Kim is
He is currently an Assistant Professor with the Division of Computer Science and Engineering, Jeonbuk National University.. He is interested in flash-based