<응용논문> DOI:10.3795/KSME-A.2010.34.3.369
개선된 교차축 연동제어기를 이용한 리니어 모터의 위치제어
한 상 오
*
· 허 건 수*†
*
한양대학교 기계공학부Position Control of Linear Motor by Using Enhanced Cross-Coupling Algorithm
Sangoh Han*
and Kunsoo Huh*†
* School of Mechanical Engineering Hanyang Univ.
(Received October 12, 2009 ; Revised January 6, 2010; Accepted January 11, 2010)
1. 서 론
리니어 모터를 이용한 직선 이송 기구는 산업전 반에 걸친 기초 기반 제품으로써 선형운동이 필요 한 매우 다양한 분야에 적용되고 있다. 고속/고정 밀 선형운동을 구현하기 위하여 보통 리드 스크류 같은 기계적 동력전달 메커니즘을 이용한 로터리 모터를 사용하거나 직접구동 방식인 리니어 모터 를 사용하고 있다. 그러나 동력 전달 장치를 이용 한 방법은 시간지연이나 동적 응답특성을 감소 시 킬 뿐만 아니라 백래쉬, 마찰력 등으로 인한 운동 에너지의 손실이 크게 나타나므로 성능향상에 한 계가 있다. 이에 비해 리니어 모터는 동력전달장 치가 필요 없는 직접구동 방식이므로 접촉 식의 비선형 효과를 크게 줄일 수 있고 구조 또한 간단
하다. 구조가 간단하여 고추력, 긴 수명, 적은 유 지비용, 적은 열손실과 같은 장점이 있어 교통차 량용기기, 산업용기기, 사무자동화기기 등의 고속 /고정밀 직선 이송기구에 주로 사용되고 있으며 적용분야가 급격히 증가되고 있는 추세이다. 그러 나 리니어 모터는 동력전달장치를 제거함으로 인 해 파라미터 변화와 외란 등에 둔감한 동력전달장 치의 장점을 잃게 되어 모델의 불확실성이나 외란 에 민감할 뿐만 아니라 마찰과 리플의 특성에 쉽 게 영향을 받는다.
리니어 모터의 구동성능에 악영향을 미치는 대표 적인 비선형 특성으로 마찰력과 리플력 이다. 마찰 은 접촉에 의해 불가피하게 발생되며 정밀 위치제어 를 구현하는데 주요한 장애물이 되고 있다. 마찰력 은 보통 정적, 쿨롱, 점성마찰과 stribec 효과로 모델 링하며, 특히 정적마찰과 쿨롱마찰은 속도에 대한 비선형 함수이다. 리플력은 코깅력과 릴럭턴스력에 Key Words : Cross-Coupling Control(교차축 연동제어기), Adaptive Sliding Mode control(적응 슬라
이딩 모드 제어), Friction Force(마찰력), Force Ripple(리플력)
초록: 리니어 모터는 동력전달장치가 필요 없는 직접구동 방식으로 접촉 식의 비선형 효과를 크게 줄일 수 있고 구조 또한 간단하다. 그러나 리니어 모터는 동력전달장치를 제거함으로 인해 파라미터 변화와 외란 등에 둔감한 동력전달장치의 장점을 잃게 되어 모델의 불확실성이나 외란에 민감할 뿐만 아니라 마찰과 리플의 특성에 쉽게 영향을 받는다. 본 논문은 리니어 모터의 두 축을 대상으로 위치제어에 악영향을 주는 대표적인 비선형 함수인 마찰력과 리플력을 추정하여 이를 보상하며 개선된 교차 축 연동제어기를 통해 축 간의 윤곽정밀도를 향상시켰다. 기존의 연구된 제어기들은 위치추종과 윤곽추종을 위해 개별적인 제어기를 설계하였으나 제안된 제어기는 하나의 안정한 제어기로 두 축의 위치정밀도와 윤곽정밀도를 동시에 향상시켰다. 제안된 비선형 적응제어기는 모의실험을 통하여 기존의 제안된 교차 축 연동제어기와 비교검증을 함으로써 제안된 제어시스템의 성능을 검증하였다.
Abstract: Linear motors are easily affected by load disturbances, force ripples, friction, and parameter variations because there are no mechanical transmissions that can reduce the effects of model uncertainties and external disturbance. In this study, a nonlinear adaptive controller to achieve high-speed/high-accuracy position control of a two-axis linear motor is designed. The operation of this controller is based on a cross-coupling algorithm. Nonlinear effects such as friction and force ripples are estimated and compensated for. An enhanced cross-coupling algorithm is proposed for effectively improving the biaxial contour accuracy while achieving closed-loop stability. The proposed controller is evaluated by performing computer simulations.
† Corresponding Author, [email protected]
의해 발생한다. 코깅은 자석과 이동자의 철심 사이 의 상호인력의 결과로 발생하며 저속 또는 이동자에 적은 하중이 작용할 때 크게 발생한다. 릴럭턴스력 은 자석과 이동자 사이의 상대위치에 대한 권선의 self-inductance 의 변화에 기인하여 발생된다. 리니어 모터에 지배적인 비선형성을 주는 악영향을 극복하 기 위해서 모터자석의 공간배치나 모터구조의 대체 설계, 공기베어링 등의 대안을 강구할 수 있지만 이 러한 메커니즘은 시스템의 구조를 복잡하게 하거나 비용이 높아지는 단점이 있다.
리니어 모터 시스템에 대하여 적절한 알고리즘 을 통해 이와 같은 비선형 특성을 보상하여 고속/
고정밀 제어를 가능하게 하는 연구가 진행되었 다.(1~3) Tan,(1) Yao(2) 그리고 Kim(3) 등은 한 축의 PMLSM(Permanent Magnet Linear Synchronous Motor) 시스템에서 비선형성을 강인한 적응 제어를 이용 하여 위치오차를 줄이는 연구를 수행하였다. 그러 나 두 축 구동 시에는 이러한 기준의 알고리즘을 적용하기가 쉽지 않다. 두 축 구동 시에 축간의 동기화는 기계적 메커니즘과 고속/고정밀 선형운 동을 구현하기 위하여 고려되어야 하며 Koren(5,6) 에 의해 제안된 교차축 연동제어 알고리즘은 기준 윤곽과 실제윤곽의 거리인 윤곽오차(contour error) 를 감소시키기 위해 효율적인 제어기이다. Lo(6) 등은 원하는 윤곽상의 순간 기준점에 접하는 원의 곡률반경을 계산하여 윤곽오차를 근사화 하였으며 Yeo(7) 등은 기존의 교차축 연동제어기를 단순화하 여 적용하였다. Srinivasan 와 Kulkarni(8) 등은 최적 제어 방식에 의한 윤곽오차 제어기를 설계하였으 며 Chen(9) 등은 극좌표계를 사용하여 두 축 시스 템에 대하여 불확실한 파라미터와 외란을 보상하 기 위해 강인한 적응제어를 PMLSM 에 적용하였 다. 그러나 이들은 각각의 축에 비선형성의 외란 에 대하여 강인성과 안정성을 보장하거나, 극좌표 계를 사용하여 두 축의 적용하였더라도 좌표를 변 환함에 있어 어려움이 있다.
본 논문은 리니어 모터의 두 축을 대상으로 위 치제어에 악영향을 주는 대표적인 비선형 함수인 마찰력과 리플력을 추정하여 이를 보상하며 개선 된 교차축 연동제어기를 통해 축 간의 윤곽정밀도 를 향상시켰다. 기존의 연구된 제어기들은 위치추 종과 윤곽추종을 위해 개별적인 제어기를 설계하 였으나 제안된 제어기는 하나의 제어기로 설계함 으로써 두 축의 위치정밀도와 윤곽정밀도를 동시 에 향상시켰다. 논문의 구성은 다음과 같다. 2 장에 서는 리니어 모터를 이용한 제어시스템의 기본구
조와 지배적인 비선형성을 포함한 리니어 모터의 모델링을 하였으며 3 장에서는 기존에 제시된 교 차 축 연동제어기를 나타내었다. 4 장은 리아프노 프 함수(Lyapunov function)를 기반으로 개선된 교 차 축 연동 제어 알고리즘을 포함한 비선형 적응 제어기를 설계하였다. 5 장에서는 설계된 비선형 적응 제어기의 타당성을 검증하기 위하여 기존에 제시된 교차 축 연동제어기와 제안된 비선형 적응 제어기를 모의실험을 통하여 비교검증을 함으로써 제안된 제어시스템의 성능을 검증하였다.
2. PMLSM 시스템 모델링
PMLSM 드라이브 시스템은 서보 드라이버에 전 류신호를 입력하여 리니어 모터의 위치를 제어하 는 전류제어 시스템으로 엔코더에 의해 측정되며 피드백 된 이동자의 변위와 속도신호는 각각 기준 위치입력과 기준 속도입력과 비교되어 위치 루프 제어기와 속도 루프제어기에 의해 서보 드라이버 에 전류를 인가하게 된다.
PMLSM 의 동 특성 방정식은 기존에 연구된 바와 같이 동기회전식 기준 프레임(synchronous rotating reference frame)으로 표현 될 수 있다.(10)
q q q e d
d d d e q
Ri d dt Ri d
dt
ν λ ω λ
ν λ ω λ
= + +
= + −
(1)
r e
PM d d d
q q q
P i L
i L
ω ω
λ λ
λ
= +
=
=
(2)
여기서, vd와 vq는 d, q축 전압, id와 iq는 각각 d, q축 전류, λd와 λq는 d, q축 회전자 자속, Ld와 Lq는 각각 d, q축 인덕턴스, R은 회전자 저항, ωe는 인버터 주 파수, λPM은 영구자석의 자속, ωr은 이동자 속도, P 는 극수 이다. 또한, 생성된 전자기력은 다음과 같 이 표현할 수 있다.
3 [ ( ) ]
em 2 PM q d q d q
F = P
λ
i + L −L i i (3)PMLSM 서보 드라이버의 제어에서 d, q좌표축에서 의 자속의 위치는 홀센서에 의해 결정이 되므로 id=0이라 가정하면 λPM은 PMLSM에 대하여 상수 이므로 d축 자속 λd는 고정되고 전자기력 Fem은 폐루프 제어에 의해 결정되는 전류 제어기의 입력 인 iq* 에 비례하게 된다. 따라서 전자기력 Fem은
전류 제어기의 입력 값인 iq* 와 추력상수의 곱으 로 간단히 표현할 수 있다.
* q f
em K i
F = (4)
여기서, Kf는 1.5PλPM으로 모터의 전류당 발생토크 출력을 나타내는 추력상수이다. 기계적인 지배방 정식에 식 (4)를 대입하면 다음과 같이 표현할 수 있다.
i mi i( ) emi f qi
M x&& +w t =F =K i (5) 여기서
( ) ( ) ( )
i fi mi ri mi
w t =F x& +F x (6)
이며, xmi은 i 축의 모터 이동변위, Mi는 이동자의 무게, wi(t)는 i 축의 전체 외란 항으로 리플력, 마 찰력과 부하의 합이다. 리플력은 주기적인 정현파 형식의 함수로 식 (7)과 같은 일차 모델(1), 마찰력 은 정적, 쿨롱, 점성 마찰과 stribeck 효과의 조합 으로 식 (8)과 같이 모델링(1) 할 수 있다.
1 2
( ) sin( )
sin( ) cos( )
ri mi i mi
i mi i mi
F x A x
a x a x
ω φ
ω ω
= +
= + (7)
( / )2
( ) [ ( ) xmi xs ] ( )
fi mi ci si ci mi i mi
F x& = F + F −F e− & & sign x& +B x&
(8) 여기서, a1i과 a2i는 리플력의 크기이며 ω는 리플의 주파수이다. Fci는 쿨롱마찰, Fsi는 정적 마찰의 높 이,
x &
s는 stribeck 속도, Bi는 점성 마찰계수이다.3. 기존의 교차 축 연동제어기
일반적인 서보 제어기는 각각의 구동 축에 대해 독립적으로 설계 되는데 반해 교차 축 제어기(6)는 구동 축들을 상호 연관시켜 각각의 축의 추종오차 와 윤곽오차를 줄임으로써 윤곽 정밀도를 향상시 킨다. 교차축 연동제어기(variable gain Cross- Coupling Controller, CCC)의 근사화한 윤곽오차 ε 는 기준윤곽의 접선각 그리고 각각에 축의 위치오 차 ei, ei+1, 기준윤곽에 호의 반경 ρ 에 의해 구할 수 있으며 식 (10)과 같다.
위치추정 오차는 다음과 같이 정의한다.
i: di mi
e =x −x (9)
여기서 xdi는 i 축의 기준위치이다. 임의의 궤적에 대한 윤곽오차는 Fig. 1 와 같이 기준윤곽과 실제
R (reference position)
real ε ei
ei+1
P (actual position) approximated ε
ϕ A
(x
o,y
o)
ρ(radius of curvature)
instantaneous tangent
i-axis i+1-axis
desired contour
Fig. 1 The actual and approximated contour error 윤곽의 차로 정의되며 식 (10)과 같다.
dxi, dxi+1는 윤곽궤적에 정규화된 법선 벡터이다.
( ) (2 1)2
( ) t sin e
icos e
iε
=
ρ ϕ− +
ρ ϕ−
+−
ϕ (10) 여기서ϕ
는 i 축과 기준위치의 접선 사이의 각도 이며 위 식을 Taylor series expansion 으로 표현 후 고차항을 무시하여 단순화하면 아래의 식과 같다.1 1 1
( )t cos ei sin ei c ei i c ei i
ε
≅ϕ
+ −ϕ
= + + − (11)( ) ( )
1
2 1 2
1 1
( / ) 1
, .
1 / 1 /
i i
i i
i i i i
dx dx
c c
dx dx dx dx
+ +
+ +
= =
+ +
4. 적응 제어기 설계
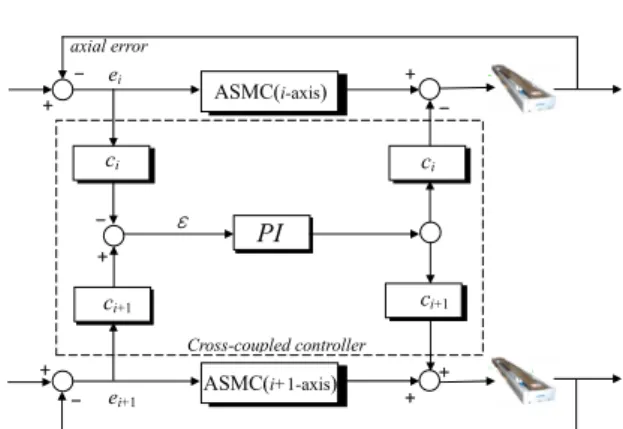
적응 슬라이딩 모드 제어기(Adaptive Sliding Mode Controller, ASMC)는 시스템이 어느 정도 불확실성을 가지고 있을 때 시스템의 안정성을 보장할 수 있는 강인한 적응 제어기법 이다. 기존의 서보 제어기는 Fig. 2 와 같이 각 구동 축에 대해 독립적으로 설계와 교차축 연동제어기를 설계(4)함으로써 위치추종 성능 과 윤곽추종 성능을 향상시켰다.
본 논문은 리니어 모터에 악영향을 주는 비선형 함수들의 계수들을 각각 추정하여 보상함으로써, 비선형 요소에 의해 발생하는 위치 추종오차를 감 소시키며 교차축 연동제어 알고리즘을 포함한 비 선형 적응 제어기를 설계함으로써 위치추종과 윤 곽추종을 위한 제어기를 각각 설계하는 것이 아니 라 하나의 제어기로 설계함으로써 두 축의 위치정 밀도과 윤곽정밀도를 동시에 향상시킨다.
위치오차와 윤곽오차를 동시에 줄이기 위하여 다 음과 같이 두 오차가 커플 된 새로운 오차를 정의 한다
*: ( 1)i
i i i
e = + −e
α ε
c (12)c
ic
i+1c
i+1PI
Cross-coupled controller +
-
ASMC(i-axis) +
ε
eic
i - +ASMC(i+1-axis) ei+1
+ -
-
+ + axial error
Fig. 2 The biaxial motion control system with original cross-coupling control
슬라이딩 모드 제어시스템 설계에서 먼저 선행되 어야 할 것은 제어대상에 대한 적절하고 안정한 슬라이딩 평면(sliding surface)을 선정하는 것으로 서보 시스템의 추종성능을 향상시키기 위해 식 (13)과 같이 슬라이딩 평면을 선정하였다.
* *
i i i
s =e& + Λe (13)
여기서 α, Λ는 양의 게인이다. 슬라이딩 평면을 시 간에 대해 미분하고
i di mi
e = x − x
&& && &&
을 이용하여 식 (14)과 같이 정리될 수 있다.( ) ( )
(
1i 1 i *)
mi di i i i i
x x d c c e s
dt
α ε α ε
= + − + − &+ Λ −
&& & & &
(14) 식 (7), (8), (14)을 식 (5)에 대입하면 다음과 같이 전개된다
T
i i f qi i i
M s& = −K i +
θ
Y (15)여기서
( ) ( )
2
* *
( / )
1 2
*
: 1 1
[ ( ) ]
( ) sin( ) cos( )
mi s
i i
i di i i i
x x T
i i ci si ci i i i
T
i i mi mi mi mi
D x d c c e
dt
M F F F e B a a
Y D sign x x x x
α ε α ε
θ
ω ω
−
= + − + − + Λ
= + −
=
& &
&
& &
& &
으로 정의된다. 또한, 오차방정식의 안정성을 증명하 기 위하여 리아프노프(Lyapunov function candidate)함수 를 식 (16)와 같이 정의한다.
( )
2
1
1 1 1
( , , ) 1+
2 2 2
T T T
i i i i i i i
i
V s θ ε s M s θ θ kεε α ε
=
=
∑
+ Γ +% % %
(16)
여기서, V 는 리아프노프 함수, si는 슬라이딩 평면, Γ는 적응이득(adaptation gain),
θ
~는 리니어 모터 의 비선형성 함수의 실제 파라미터와 추정 파라미 터와의 오차이다. 리아프노프 함수를 시간에 대해 미분한 후 식 (15)을 대입하면 다음과 같다.( )
( )
2
1 2
1
1 1+
1 1+
T T T
i i i i i
i
T T T
f qi i i i i i i
i
V s M s k
K i s Y s k
ε
ε
θ θ ε α ε
θ θ θ ε α ε
=
=
= +Γ +
= − + +Γ +
∑
∑
&% %
& & &
&% % &
(17) 식 (17)와 같이 리아프노프 함수를 시간에 대해 미분한 V&은 적어도 V&≤0이고 추종오차를 0 으로 수렴시키기 위해 제어입력인 전류명령 iqi과 적응 칙(adaptation law)을 식 (18), (19)로 유도할 수 있다.
1 ˆT
( )
1i ( )qi i i i i i
f
i Y Hs k c sign s
K θ ε ε β
= + + − + (18)
i Y si i
θ
&% = −Γ (19)여기서
1 0
( ) 1 0
i i
i
sign s if s
if s
>
= − <
H 와 β 는 각각 양의 제어이득이며 위의 두 식을 식 (17)에 대입하면 다음과 같다.
( )
2
1
1 1 2 2
1
( ) 1+
T T
i i i i i i i
i
T T
V s Hs Y s s
kε c s c s kε
θ θ β
ε ε α ε
=
= − + +Γ +
+ − +
∑ % &%
&
&
(20)
식 (11), (13)을 이용하여 아래와 같이 정리한 후
( ) ( )
1 1 2 2
1 1 2 2
( )
1
T
T
k c s c s
k c e c e
ε ε
ε
ε αε α ε
−
= & − & − &− Λ +
(21)
(
2 2 1 1) (
2 2 1 1)
T T
kε c e c e c e c e kε
ε
&ε
= & −& + & − & ε
(22) 식 (19), (21), (22)을 식 (17)에 대입하면 아래와 같다.( )
2
1
2 2 1 1 (1 )
T
i i i
i
T T
V s Hs s
c e c e kε kε
β
ε ε α ε
=
= − +
+ − − Λ +
∑
&
& &
(23)
함수 ( 2 2 1 1)
c e & − c e &
Tk
εε 이 음의 반한정(negative semi definite)임을 보이기 위해2ab ≥ a
2+ b
2의 부 등식을 이용하여 다시 전개하면 아래와 같다.( )
( ) ( ) ( ) ( )
( ) ( )
2 2 1 1
1 2 2 1 2 2 1 1
2 2 2 2 2 2 2 2
2 1 2 1 2 1 1 2
1 1 2 2
2
1
( ) ( )
1 2
2
1 (24)
2
T
T
T T
T T
T T
i i
i
c e c e k
c e c e k c e c e
c c k e e c c k e e k c e k c e
k e e k
ε ε
ε ε
ε ε
ε ε
ε
ε ε
ε ε
=
−
= − − −
≤ − + − + − +
= − +
≤ − ∑ −
& &
위의 식을 식 (23)에 대입하면 아래와 같다.
2
1
1 2
(1 ) 0
T T
i i i i i
i T
V s Hs e k e s
k
ε
ε
β
ε α ε
=
≤ − + +
− + Λ + Λ ≤
∑
&
(25)
식 (25)은 음의 반한정이다 이는 리아프노프 함수 V가 제한(bound)된다는 의미이며, 또한 식 (16)의 si, θ
~
i 그리고 ε 도 제한된다. si의 제한으로부터 시 간이 무한대로 증가함에 따라 ei*은 0으로 수렴함 을 알 수 있다. 즉, 위치 추종오차와 윤각 추종오 차는 시간이 지남에 따라 0으로 수렴한다.5. 모의실험
개선된 교차축 연동제어기 알고리즘의 타당성을 검 증 하 기 위 해 두 축 의 모 델 을 바 탕 으 로
Table 1 System parameters i-axis (i+1)-axis
Kf 48.1 N/Amp 48.1 N/Amp
R 8.0 Ohms 8.0 Ohms
Ld,q 2.8 mH 2.8 mH
M 1.5 kg 2.0 kg
Fc 10 N 8 N
Fs 12 N 10 N
x& s 0.1 m/s 0.1 m/s
B 0.003 0.08
a1 3 N 2 N
a2 0.3 N 0.3 N
ω
300 rad/m 300 rad/mTable 2 Control parameters
α 5
ke 10
Λ 200
H 1000
β 300
Γ 500
µ 4000
kp 5×105
ki 5×105
MATLAB/Simulink를 이용한 모의실험을 수행하였다.
반경 100mm인 i축과 i+1축에 각각 사인 파와 코사인 파의 기준입력을 주어 12초 동안 구동하였다. 각 축의 시스템 파라미터 값과 제안된 제어기에 선정된 게인값 은 각각 Table 1과 Table 2와 같다. Fig. 3은 각 축에 임의 로 부여한 마찰력과 리플력을 적응 제어 알고리즘을 이용하여 추정한 결과 이다. 우수한 추정을 확인할 수 있으며 이는 제안된 제어기가 리니어 모터 구동에 악 영향을 주는 비선형 효과를 보상할 수 있음을 알 수 있다. Fig. 4는 i축과 i+1축의 위치추종 오차이며 Fig. 5는 윤곽추종 오차이며 약 4 µm의 오차를 나타내었다.
0 2 4 6 8 10 12 14 16 18
-20 -10 0 10 20 30
time (sec)
distu. (N)
i-axis
real distur. estimated distur.
0 2 4 6 8 10 12 14 16 18
-20 -10 0 10 20
time (sec)
distu. (N)
i+1-axis
Fig. 3 The estimated sum of friction force and ripple force
0 2 4 6 8 10 12 14 16 18
-5 0 5
time (sec) error (µm)
i-axis
0 2 4 6 8 10 12 14 16 18
-5 0 5
time (sec) error (µm)
i+1-axis
Fig. 4 The tracking errors of i-axis and i+1-axis
0 2 4 6 8 10 12 14 16 18
-5 0 5
time (sec) error (µm)
Fig. 5 The contour error
0 2 4 6 8 10 12 14 16 18 -10
-5 0 5 10 15
time (sec) error (µm)
w/ proposed ccc w/ conventional ccc
w/o compensation of the nonlinearities
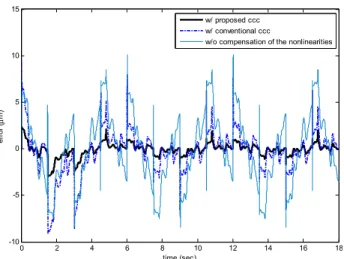
Fig. 6 Comparison of the contour errors Fig. 6에서는 제안된 적응제어 알고리즘을 적용 했을 경우와 기존의 PI 제어를 포함한 교차 축 연 동기를 사용했을 경우, 그리고 마찰력과 리플력을 보상하지 않았을 경우의 윤곽오차를 비교하였다.
6. 결 론
두 축 리니어 모터의 고속/고정밀 선형운동을 구현하기 위하여 위치제어에 악영향을 주는 비선 형성을 추정하고 이를 보상하며, 개선된 교차축 연동기를 이용하여 축 간의 윤곽정밀도를 향상시 키기 위한 알고리즘을 구현하였다. 모의실험을 통 하여 기존의 교차축 연동제어기와 본 논문에서 제 안한 개선된 교차축 연동제어기의 성능을 평가하 였다. 제안된 알고리즘은 마찰이나 리플과 같은 외란 추정성능이 우수하며 이를 적절히 보상하였 다. 기존에 제어기들은 위치추종과 윤곽추종을 위 해 개별적으로 제어기를 설계하였으나 제안된 제 어기에서는 통합된 하나의 제어기로 설계함으로써 두 축의 위치정밀도와 윤곽정밀도를 동시에 향상 시켰다.
후 기
이 논문은 2009 년도 정부(교육과학기술부)의 재원
으로 한국연구재단의 지원을 받아 수행된 기초연 구사업임(No. 2009-0072982).
참고문헌
(1) Tan, K. K., Huang, S. N. and Lee, T. H., 2002, “Robust Adaptive Numerical Compensation for Friction and Force Ripple in Permanent-Magnet Linear Motor,” IEEE Transactions on Magnetics, Vol. 38, No.1, pp. 221~228.
(2) Yao, B. and Xu, L., 2002, “Adaptive Robust Motion Control of Linear Motors for Precision Manufacturing,”
Mechatronics, Vol. 12, pp. 595~616.
(3) Kim, H. B., Lee, B. H. and Huh, K. S, 2005, “Nonlinear Adaptive Control for Linear Motor Through the Estimated Friction Force and Force Ripple,” KSME International Journal, No.05S201, pp.1144~1149.
(4) Huh. K., Han. S. and Lee. B., 2008, “Nonlinear Adaptive Control of a Linear-Motor-Driven X-Y Table via Estimating Friction and Ripple Forces,” Proceedings of the Institution of Mechanical Engineers, Part C, Journal of Mechanical Engineering Science, Vol. 222, pp. 911-918.
(5) Koren, Y., 1980, “Cross-coupled Biaxial Computer Control for Manufacturing System,” ASME Journal of Dynamic Systems, Measurement, and, Control, Vol. 120, No. 4, pp. 265~272.
(6) Koren, Y. and Lo, C. C., 1992, “Variable-gain Cross- Coupling Controller for Contouring,” Annals of the CIRP, Vol. 40, No. 1, pp. 371~374.
(7) Yeh, S. S. and Hsu, P. L, 2000, “A New Approach to Biaxial Cross-coupled Control,” Proceeding of the 2000 IEEE, 0-7803-6562-3, pp. 168-173.
(8) Kulkarni, P. K. and Srinivasan, K.,1989, “Optimal Contouring Control of Multi-Axial Drive Servomechanisms,” ASME Journal of Engineering for Industry, Vol. 111, No. 2, pp. 140~148.
(9) Shen, S. L., Liu, H. L., and Ting, S. C., 2002,
“Contouring Control of Biaxial Systems Based on Polar Coordinates,” IEEE/ASME Transactions on Mechatronics, Vol. 7, No. 3, pp. 329~345.
(10) Pillay, P. and Krishnan, R., 1989, “Modeling, Simulation, and Analysis of Permanent Magnet Motor Drives, Part 1: The Permanent Magnet Synchronous Motor Drive,” IEEE Transactions on Industry Applications, Vol.
25, No. 2, pp. 189~196.