Vol.13, No.4, pp.50-59 (2019)
플랩제어시스템 주제어밸브의 모델기반 설계 및 성능해석
조현준1†· 안만진1· 주춘식1
1㈜한화/기계 항공우주연구소
Model-based Design and Performance Analysis of Main Control Valve of Flap Control System
Hyunjun Cho1,†, Manjin Ahn1 and Choonshik Joo1
1Aerospace R&D Center, Hanwha Corporation
Abstract
The design of the main control valve, which is the main component of the flap control system, was based on actual manufacturing experience on the basis of trial and error method. In this paper, a model-based part design method is proosed. The flap control system consists of a main control valve, fail-safe valve, solenoid valve, LVDT and force motor. The main control valve consists mainly of a spool and slot. The important design parameters of the main control valve are the slot width, overlap and clearance. AMESim is linked to the model and it analyzes the flow path of the main control valve. Applying the proposed design procedure, it was confirmed that the required performance was satisfied within the allowable machining error range.
초 록
플랩제어시스템의 주요 구성품인 주제어밸브의 설계는 실제 제작 경험을 바탕으로 반복-오차 방법에 의존하여 수행하였다. 본 논문에서는 모델 기반의 부품 설계 방법을 제안하였다. 플랩제어시스템은 주 제어 밸브, 고장-안전 밸브, 솔레노이드 밸브, LVDT, 구동 모터 등으로 구성된다. 주제어밸브는 주로 스 풀과 슬롯으로 구성된다. 주제어밸브의 중요한 설계변수는 슬롯의 폭 (Slot Width), 오버 랩(Overlap) 및 간극(Clearance)이다. AMESim을 활용하여 주 제어 밸브의 유로를 모델링하고 해석하였다. 제안된 설계 절차를 적용한 결과 허용된 가공오차 범위 내에서 요구 성능을 충족함을 확인하였다.
Key Words: Flap Control System(플랩제어시스템), Main Control Valve(주제어 밸브), Fail-safe(고장-안전), Solenoid Valve(솔레노이드 밸브), Flow Rate(유량)
1. 서 론
본 논문에서는 플랩제어시스템(flap control system) 의 유량을 제어하는 핵심 부품인 주제어밸브(MCV;
main control valve)의 해석 모델을 통한 설계 결과를 제시한다. 플랩은 항공기의 이차 비행조종시스템 (secondary flight control system)으로서 항공기 플래 퍼론(flaperon) 외측에 각각 부착되어 항공기의 이착륙
시 날개에 작용하는 항력과 양력을 변화시키는 장치이 다[1]. 전기를 동력원으로 활용하여 플랩 전체를 구동 시키는 응용이 존재함에도 불구하고[2, 3], 현실적인 이유로 현재까지 대부분의 항공기에서는 유압을 동력 원으로 활용하여 항공기 플랩을 구동시킨다[4]. 이 때 항공기 구동 시스템은 매우 정밀한 유량 제어를 필요 로 하며, MCV는 그것을 정밀 제어하는 부품이다. 따 라서 MCV 설계 완성도에 따라 플랩제어시스템의 성 능이 결정된다고 할 수 있다.
MCV 설계는 대부분 실제 제작하면서 얻은 시험 결 과 및 경험 데이터를 기반으로 기계가공(machining)작 업 및 반복-오차(trial and error)에 의존하여 진행된다.
Received: Dec. 04, 2018 Revised: Jul. 10, 2019 Accepted: Jul. 16, 2019
† Corresponding Author
Tel: +82-41-538-7957, E-mail: [email protected]
Ⓒ The Society for Aerospace System Engineering
Fig. 1 Three Physical Domain of Flap Control System 하지만 초정밀 유량 제어 밸브를 설계하는 경우 초
기 설계 단계에서부터 해석에 기반한 설계로 초기 접 근해야만 원하는 성능에 쉽게 접근할 수 있으며 비용 및 일정의 부담을 줄일 수 있다[5]. 따라서 모델 기반 설계(Model-based design)접근에 의한 설계 초기 접 근이 매우 중요하다[4, 6-8]. 하지만, 설계의 해석적 접근의 중요성에도 불구하고 군사 보안 상의 이유로 인해 실제 항공기 MCV 설계 요구도 및 해석적 접근 에 대해 자세히 설명하는 연구 결과는 부족한 실정이 다. 본 논문에서는 플랩제어시스템의 주요 구성품인 주제어밸브의 설계 목표를 설정하고 초기 설계단계에 서 기존의 반복-오차 법 대신 모델 기반의 부품 설계 방법을 제안하였다.
2. 플랩제어시스템
2.1 플랩제어시스템의 전자/유압/기계 도메인 먼저 항공기 플랩제어시스템의 전반적인 구성과 MCV에 대해 개략적으로 설명한다. 실제의 전자식 비 행제어는 Flap의 위치 및 MCV 스트로크(stroke) 변위 의 제어 루프를 포함하는데, 비행제어 컴퓨터(FLCC;
flight control computer)가 RVDT(rotary variable differential transformer), LVDT(linear variable differential transformer)로부터 각각의 측정치를 전달 받아 제어를 수행한다. 이들은 각각 전체 구조 상
‘High/Low Level Control Loop’에 해당하며, 결과적으 로 비행제어 컴퓨터는 MCV를 구동시키기 위해 구동 모터(force motor)로 들어가는 전류를 제어함으로써 유압 밸브를 통과하는 유량을 제어할 수 있다. 많은 경우 소형의 유압제어 밸브와 유압 모터를 활용하여, 항공기 구동장치의 동력을 생성 및 제어하며, 유압 모 터로부터 생성된 기계적 동력은 토크 튜브(torque
tube)를 통하여 RGA(rotary geared actuator)로 전달 되어 플랩을 회전시킨다. 이와 같은 과정을 요약하였 을 때, Fig. 1에서와 같이 항공기 플랩제어시스템은 크 게 전자 영역, 유압 영역, 기계 영역의 3가지 영역으로 이루어진다고 볼 수 있다. 각각 영역은 제어 루프로부 터 측정치를 받아 제어 명령을 만들고 전달하며, 제어 된 유량을 통해 동력을 생성하고, 동력을 플랩으로 전 달하여 운동을 발생시킨다[1].
2.2 활용 소프트웨어 및 주제어밸브
일반적으로 전자 영역은 그것의 배치(layout)을 설계 하는 시스템 업체(system vendor), 그것을 실제로 구 현하는 구성품 업체(component vendor)와 플랩 작동 기(flap actuator)를 제작하는 시스템-구성품 납품업체 (system-component vendor)의 체계통합(system integration) 파트 간 협업에 의해 구현된다. 이 때, MATLAB/Simulink 등의 지배방정식 기반 소프트웨어 는 피드백 루프(feedback loop)를 포함한 시스템 구현 에서 다른 소프트웨어와의 호환 및 인터페이스 (interface)가 용이하므로 전자 영역 설계의 협업 작업 시 그것의 시스템 및 제어 성능을 검증하는 용도로 많 이 사용된다. 다만 유압 영역을 모델링 하는데 있어, Simulink 모델은 유압의 미세한 거동은 살피기가 어려 우며, 그것을 구현하기 위하여 많은 시간과 노력이 필 요하다. 따라서, 항공기 개발 과정에서 항공기 구동기 를 개발하는 시스템 엔지니어의 경우, 대표적인 유압 전문 소프트웨어인 AMESim[9-13]을 Simulink와 병 행, 연동하여 활용하거나, 개별로 운용하여 부품 및 시 스템 개발에 활용한다[1, 7]. 본 논문에서는 AMESim 16.0을 활용하여 MCV를 설계하였다.
Figure 1의 제어모듈(control module)은 유압 영역 의 가장 앞선 위치에 있으며 크게 MCV, FSV(fail- safe valve), SOV(solenoid valve), LVDT, 구동 모터
등으로 구성된다. 그 중 비행제어 컴퓨터로부터 아날 로그 입력을 직접적으로 전달받는 MCV는 크게 스풀 (spool)과 슬리브(sleeve)로 구성되며, 일반적으로 Fig.
2[14]와 같은 형상을 가진다. 실제 가공의 어려움에도 불구하고, 소량으로 초 정밀한 유량 제어를 목표로 하 는 항공기의 유압제어에서 슬리브의 유압 포트는 일반 적인 유압 밸브와는 달리 사각 슬롯으로 가공되어, 선 형의 유량 제어를 달성한다. MCV 성능은 가공오차에 의해 아주 예민하게 변하므로 MCV 가공 오차는 최대 2 μm 단위의 수준까지는 가공이 가능해야만 항공기 레벨에서 요구하는 엄격한 요구도를 달성할 수 있다.
3. 주제어밸브 설계 기준
아래에서 항공기 시스템 설계 요구도 중 MCV의 설 계기준(design criteria)을 제시하고, 이를 개략적으로 설명한다. MCV의 요구도 항목은 다음과 같다.
1) Maximum Flow Rate
2) Null Flow Gain (±0.05X Valve Stroke) 3) ±25% Flow Gain (±0.25X Valve Stroke) 4) Null Pressure Gain (+0.012X Valve Stroke) 5) Null Coincidence
6) Null Leakage
군사 보안 상의 이유로 인해 실제 요구도의 구체적 인 수치를 제시할 수 없으므로 문자를 활용하여 수치 를 나타내었다. MCV 전체 설계 변위는 고정되어 있으 며, 이를 X라고 하였을 때, 중립유량게인(null flow gain), ±25% 유량게인, 중립압력게인(null pressure gain)을 각각 ±0.05X, ±0.25X, 0.012X 에서 평가한 다. 1-6)의 요구도 항목 등 항공기 시스템 레벨 요구 도는 각각 문장으로 명확하게 명시되어 있으며, MCV 요구도를 간략하게 풀어 쓰면 다음과 같다.
Fig. 2 Sectional View of Main Control Valve 요구도 1)은 전 스트로크(full stroke) X 변위에서의
유량이 주어진 요구도 상의 최대 유량 Y의 ±A%의 범 위 안에 있을 것을 명시한다. 요구도 2)는 MCV Spool의 ±0.05X 밸브 변위에서 주어진 공칭유량게인 (nominal flow gain) Z의 50~200%를 유지할 것을 명 시한다. 요구도 3)은 MCV 스풀의 ±0.25X 밸브 변위 에서 Z의 ±10 %을 벗어나지 않을 것을 요구하며, 요 구도 4)는 MCV 스풀의 양 포트를 막았을 때의 MCV 밸브 변위+0.012X에서의 C1 포트 압력이 최대하중압 력(load pressure) K의 40% 보다 커야 할 것을 요구 한다. 항공기 전체에 걸쳐 공급 압력 𝑃𝑠과 리턴 압력 𝑃𝑟은 고정되어 있으므로, 𝑃𝑠와 𝑃𝑟의 차가 이론 상의 최 대하중압력 K가 된다. (i.e., 𝑃𝑠− 𝑃𝑟=K) 요구도 5)는 중 립 위치에서 실린더 압력이 공급압력 P의 33~66% 안 에 있을 것을 요구한다. 마지막으로 요구도 6)은 중립 위치에서 Y의 3%를 초과하지 않을 것을 요구한다.
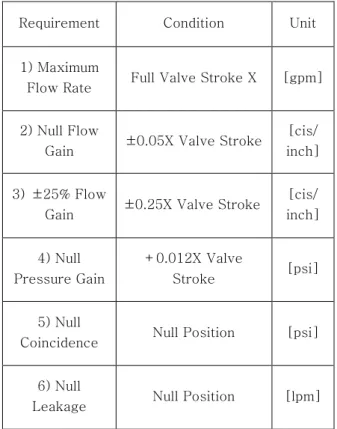
위의 설명을 구체적인 수치가 드러내지 않는 선에서 간략하게 정리하면 Table 1, 2와 같으며, 주어진 평가 조건 하에서 유온 조건은 상온을 기본으로 모든 조건 을 만족시키는 MCV를 설계해야만 한다.
Table 1 Requirements and Evaluation Condition Requirement Condition Unit
1) Maximum
Flow Rate Full Valve Stroke X [gpm]
2) Null Flow
Gain ±0.05X Valve Stroke [cis/
inch]
3) ±25% Flow
Gain ±0.25X Valve Stroke [cis/
inch]
4) Null Pressure Gain
+0.012X Valve
Stroke [psi]
5) Null
Coincidence Null Position [psi]
6) Null
Leakage Null Position [lpm]
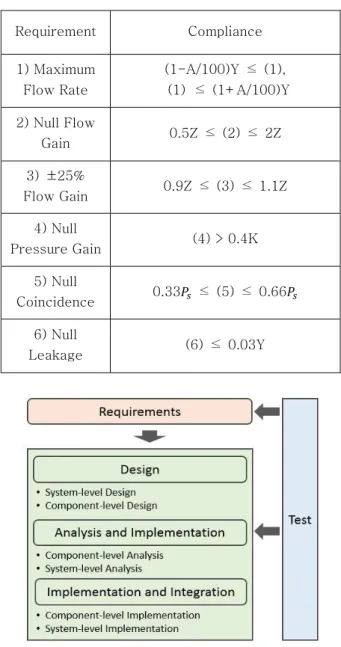
Table 2 Compliance Condition of Requirements
Requirement Compliance 1) Maximum
Flow Rate
(1-A/100)Y ≤ (1), (1) ≤ (1+A/100)Y 2) Null Flow
Gain 0.5Z ≤ (2) ≤ 2Z 3) ±25%
Flow Gain 0.9Z ≤ (3) ≤ 1.1Z 4) Null
Pressure Gain (4) > 0.4K 5) Null
Coincidence 0.33𝑃𝑠 ≤ (5) ≤ 0.66𝑃𝑠 6) Null
Leakage (6) ≤ 0.03Y
Fig. 3 Model-based Development Process
4. 주제어밸브의 모델기반 설계
4.1 초기 개발과정
초기 개발 단계에서 일반적으로 모델 해석 결과를 설계에 활용할 때, Fig. 3에서와 같은 과정을 거친다.
실제 시제품(prototype) 이나 요구도에 의존하여 설계 하기보다 개발 과정에서 활용이 가능한 초기 모델을 기반으로 설계하며, 해석 모델은 시스템 및 구성 부품 의 설계 및 시뮬레이션, 실제 시험을 지원한다[4, 5].
모델을 중심으로 설계를 진행하면, 비용이 너무 많이 들거나, 시간이 많이 걸리거나, 위험한 상황에서 효율 적으로 시스템 성능을 분석할 수 있다. 또한 Fig. 3에 서 알 수 있는 바와 같이 시험 결과는 설계 및 해석, 그리고 요구도에까지 영향을 미치므로 개발 중간 과정
에서 요구도 변경의 사유가 되기도 한다. 해석 모델은 선제적으로 시험 결과를 예측할 수 있어야 하므로, 합 리적이고 일관된 경향의 모델 개발이 필수적으로 필요 하다. 그럼에도 불구하고 항공기 개발의 초기 단계에 서는 제한된 시간과 경제적 자원으로 인해, 개발 시작 시점에서부터 시험 결과를 활용하여 해석 모델을 개발 하는 것은 어렵다. 따라서, 초기 해석 모델은 엔지니어 의 경험과 시뮬레이션 및 과거 시험 데이터 등에 의해 시험 결과와의 해석오차를 줄이는 한편, 추후 시험결 과의 경향을 따를 수 있도록 개발되고 추후 개발이 진 행됨에 따라 부분 검증 시험을 통해 모델의 각 세부 부품을 미세하게 검증하여 세부 설계 변수(design parameter)들을 조정하는 과정을 거친다. 이 논문에서 는 항공기 시스템 개발 과정에서 부분 검증 시험 직전 의 전체 시스템 성능해석 모델 중 제어 모듈의 부분 모델을 활용하여, MCV 요구도의 만족 여부를 예측한 다.
4.2 주제어밸브 모델 및 설계결과
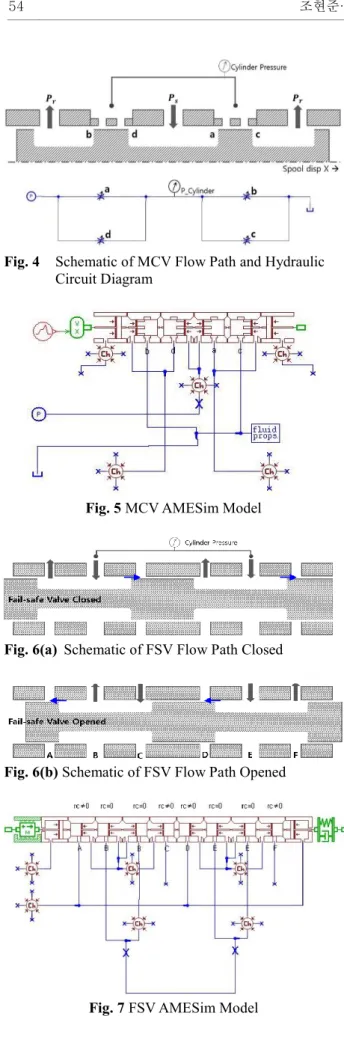
먼저 MCV 실제 유로에 바탕으로 모델을 구현한 후, 결과를 추출하여 성능 여유를 상대적으로 더 확보할 수 있는 설계 치수를 선택한다. Figure 4은 MCV 유로 및 유압 회로도 이고 Fig. 5은 MCV의 AMESim 모델 이다. MCV 실제 유로를 모델링 함으로써 MCV Spool 변위에 따른 각 포트에서의 압력 강하, 챔버(chamber) 압력 등이 MCV 설계에 반영될 수 있으며, 이를 통해 추후 MCV 세부 설계에 활용할 수 있는 의미 있는 데 이터를 추출하는 것이 가능하다.
Figure 6의 위 그림은 고장-안전 모드 시 FSV가 닫 혔을 때, 아래 그림은 정상 동작 시 FSV가 열렸을 때 로 A, B, C, D, E, F 포트는 각각 리턴 탱크, 실린더, MCV C1 포트, 리턴 탱크, 실린더, MCV C2 포트로 연 결된다. Figure 6의 화살표 방향에서 알 수 있는 바와 같이 FSV가 닫혔을 때 (고장-안전 모드) 열렸을 때 (정상동작 모드) 서로 유체 흐름의 방향이 다르며, FSV 모델은 하나의 모델로 각 모드의 유체 흐름을 모 두 반영해야만 한다. 즉, Fig. 6에서 FSV가 닫혔을 때 는 C1, C2 방향, 열렸을 때는 리턴 탱크 방향의 각기 다른 방향으로의 누유가 발생하며, 또한 C1, C2 포트 에서의 유체 흐름의 방향이 서로 반대인 것을 확인하 자. 한편, 제3장에서의 요구도 성능 4) Pressure Gain 은 Fig. 6 FSV의 C1, C2 포트가 연결된 실린더 유로 를 차단한 후 실린더 압력 차의 기울기로서 계산하며, 요구도 성능 5) Null Coincidence는 Fig. 6의 C1, C2 포트가 서로 연결된 상태에서의 한쪽 포트의 압력을 측정함으로써 계산된다.
Fig. 4 Schematic of MCV Flow Path and Hydraulic Circuit Diagram
Fig. 5 MCV AMESim Model
Fig. 6(a) Schematic of FSV Flow Path Closed
Fig. 6(b) Schematic of FSV Flow Path Opened
Fig. 7 FSV AMESim Model
Fig. 8 Control Module Model for Pre-Test FSV 모델은 항공기 정상 동작 모드에서 고장-안전 모드로 변환될 때, 밸브가 받는 힘, 반응 시간 (response time), 모드 변환 압력 (fail-safe pressure) 등의 영향을 올바르게 파악하기 위해 섬세한 작업에 의해 구현되어야만 하며, 유압 전문 소프트웨어를 활 용하였을 때, FSV의 모델은 하나의 모델로 밸브 포트 의 개/폐에 따라 정상 모드, 고장-안전 모드의 전혀 다른 유로를 동시에 형성해야만 하므로 일반적으로 MCV 모델링에 비해 더 어렵다. 한편, FSV의 고장-안 전 모드 해석 결과는 비행 제어컴퓨터로부터 고장-안 전 모드 변환 명령을 받아 FSV에 전달하는 SOV의 설 계와도 연관된다. SOV는 유량에 따른 압력 강하의 성 능이 SOV의 크기 및 기계적 반응 시간을 결정하며, 기술 수준이 높은 전문 업체 수준에서 SOV 반응 시간 은 25 msec 이하의 응답 시간을 갖고 1 msec 단위로 설계된다. 이 논문에서는 FSV 움직임에 따른 각종 고 장-안전 모드에 대한 성능 해석결과는 다루지 않는 것 으로 한다.
Figure 8은 MCV와 FSV및 SOV를 포함하는 제어 모듈 모델이다. Fig. 8 모델은 시스템 모델[1]에서의 그것과 달리 제어 모듈 구성품인 구동 모터와 LVDT 를 포함하지 않는데, 이 모델이 제3장의 MCV의 핵심 요구도 1-6)의 해석결과를 관찰하고 특정 변위에서의 유량 또는 압력의 변화를 추출하기에 충분하기 때문이 다. 즉, MCV 변위를 직접 입력으로 하였으며, 추후에 진행할 실제 시험 입력과 입력의 시간 및 형태를 동일 하게 적용하였다. 해석을 통해서 과도 상태 결과가 나 타남에도 불구하고, 실제 시험 시 전 스트로크 X에 이 르는 총 입력 시간은 과도 상태의 유량 또는 압력 결 과 값이 추출되는 것을 되도록 피하기 위하여 짧은 변 위라도 충분히 긴 시험 시간을 설정하는 것이 좋다.
MCV 성능에 영향을 끼치는 주요 설계 변수는 MCV
슬롯 폭(slot width) {a,d},{b,c}, 오버 랩(overlap) {a,d},{b,c}, 간극(clearance) 이다. 이를 각각 𝑊{𝑎,𝑑}, 𝑊{𝑏,𝑐}, 𝑂{𝑎,𝑑}, 𝑂{𝑏,𝑐}, 𝑟𝑐라고 하자. 여기서 a-d의 위 치는 Fig. 4에서 명시된 위치를 참고하도록 한다. 각 주요 변수의 설계는 스풀의 접힘(retraction) 및 펼침 (extraction)을 모두 고려해야만 하며 안정적인 요구도 만족 및 구동을 위해 대칭 형상을 선택한다. FSV의 포 트 크기 및 스풀과 슬리브의 크기, 오버 랩 구간의 길 이 등 치수(dimension)은 MCV의 그것에 비해 MCV 주요 요구도에의 영향성이 극히 미미하여 주요 설계변 수로 설정하지 않는다. 다음의 Fig. 7부터 Fig. 12에서 MCV 주요 설계 변수를 고려한 설계에 의한 해석 결 과를 확인할 수 있다.
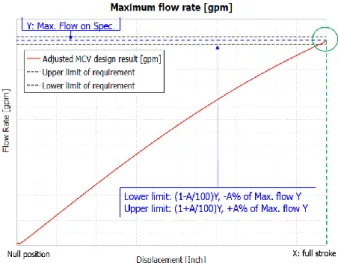
Fig. 7 Maximum Flow Rate Compliance for Adjusted MCV Design
Fig. 8 Null Flow Gain Compliance for Adjusted MCV Design
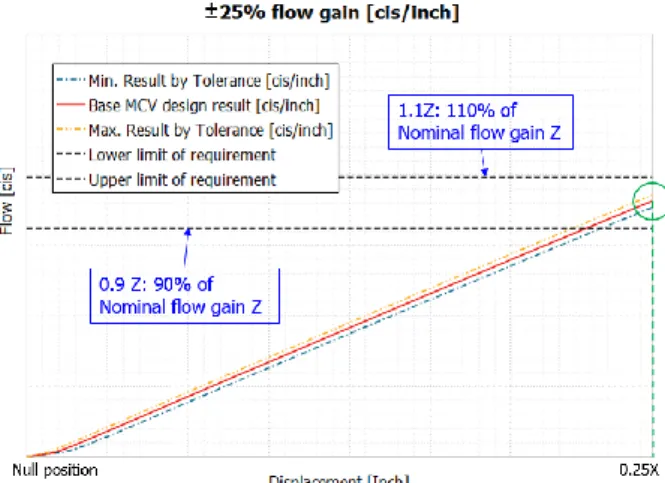
Fig. 9 ±25% Flow Gain Compliance for Adjusted MCV Design
Fig. 10 Null Pressure Gain Compliance for Adjusted MCV Design
Fig. 11 Null Coincidence Compliance for Adjusted MCV Design
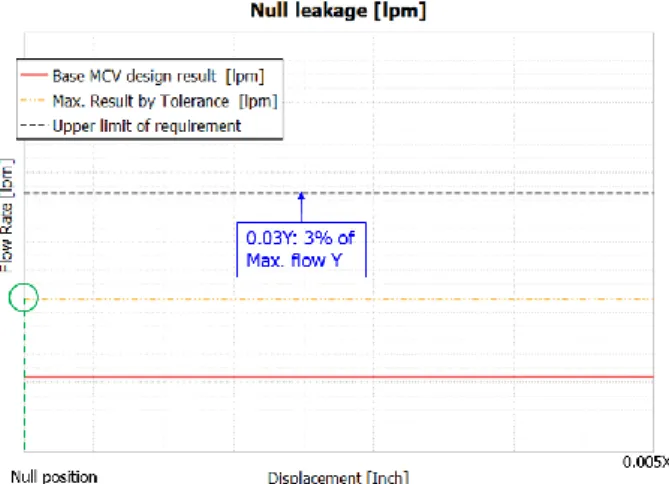
Fig. 12 Null Leakage Compliance for Adjusted MCV Design
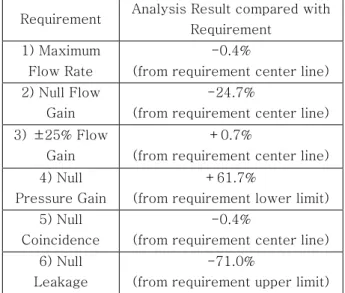
Table 3 Analysis Results for Adjusted MCV Design Requirement Analysis Result compared with
Requirement 1) Maximum
Flow Rate
-0.4%
(from requirement center line) 2) Null Flow
Gain
-24.7%
(from requirement center line) 3) ±25% Flow
Gain
+0.7%
(from requirement center line) 4) Null
Pressure Gain
+61.7%
(from requirement lower limit) 5) Null
Coincidence
-0.4%
(from requirement center line) 6) Null
Leakage
-71.0%
(from requirement upper limit)
실제 시험 시 가공 공차에 의해 +,- 방향에서의 시 험 값이 달라지므로, 엄격한 가공 공차가 보장되어야 만 +,- 방향에서 동시에 요구도를 만족할 수 있다. 실 제 가공 공차는 1 um ~2 um 수준이다.
MCV 설계 결과를 구체적인 수치로 제시할 수 없어 각 요구도에 대한 성능 여유를 백분율로 Table 3에 정 리하였다. Figure 7에서 Fig. 12까지 및 Table 3에서 성능 1-3), 5)는 요구도가 상한선, 하한선이 동시에 주 어지므로 상한선, 하한선의 중앙 선으로부터의 성능 여유를 계산하였으며, 성능 4), 6) 은 요구도가 각각 하한선, 상한선 단독으로 주어지므로 각 요구도 하한 선, 상한선으로부터의 성능 여유를 계산하였다. 따라서, 성능 1-3), 5) 는 계산 값이 작을수록 성능 여유가 큰 것이며, 성능 4), 6) 은 계산 값이 클수록 성능 여유가 큰 것이다. Table 3으로부터 모델에 기반하여 설계 결 과가 충분한 성능 여유를 가지는 것을 알 수 있다.
Figure 8의 중립유량게인 그래프 양상으로부터 중립 위치에서의 누설(leakage)과 함께 전형적인 Overlap 유량 곡선이 확인된다. 또한 이는, Fig. 10의 중립압력 게인 그래프의 변곡점 구간에서도 확인할 수 있다.
MCV Slot은 사각 형상이므로 전 변위 X에 대해 유량 이 선형적으로 증가한다. 이 때, 오버 랩 구간에서는 다음의 식[15]이 적용되므로 압력 변화가 유량에 비례 하여 선형적으로 변화한다.
Q = 𝑤ℎ3
12𝜇𝐿∆𝑃, 𝑖𝑓 (𝑤 ≫ ℎ)
w, h, 𝜇, L, ΔP는 각각 포트가 열릴 때의 사각 슬롯 의 너비, 유로의 높이 (i.e., 𝑟𝑐 /2), 유체의 점성, 오버 랩 구간의 길이, 그리고 압력 강하를 가리킨다. 본 논 문에서 설계한 MCV 사각 슬롯 w는 h에 비해 10,000 배 이상이므로 위의 식이 적용될 수 있다. 위의 식은 오버 랩 구간을 지나기 전의 층류 유동일 때 유량을 지배한다. 반면, 오버 랩 이후에 나타나는 2차 곡선 구 간은 난류 유동으로 유량 방정식에 의해 유량이 지배 되며, 압력과 유량의 관계가 2차 곡선의 양상을 가진 다. 즉, Fig. 10의 변곡점 구간은 오버 랩을 지나 MCV 슬롯이 열리게 되는 시작점을 나타낸다.
5. 공차 해석 및 요구도 준수
5.1 공차 해석
아래에서 실제 제작 시 가공공차에 따른 성능 해석 과정과 결과를 설명한다. Figure 7에서 Fig. 12의 해석 결과는 실제 제작 시 공차에 따른 성능 변화를 고려하 지 않은 것으로 임의의 가공공차가 조합된 조건 하에 서도 요구도를 항상 달성할 수 있어야만 한다. 따라서, 다음의 과정을 통해 공차 해석을 진행한다.
(1) 밸브 설계의 이론 및 경험 결과를 통해 MCV 성 능에 영향을 미치는 주요 설계 변수들을 식별하고, 식 별된 각 변수들의 실제 성능 영향성을 해석한다.
(2) 축적된 제작 및 가공 경험에 근거하여, 설계 변 수들 각각의 제작 가능한 가공 공차 값의 최소 값을 바탕으로 합리적인 가공 공차 범위를 산출한다.
(3) (1)의 기본 설계 치수에 대해 허용된 공차 범위 에 따른 설계 변수들의 가공 편차 범위를 설정한다.
(4) 각 설계 변수들의 가공 편차 범위 내 모든 경우 의 수에 따른 성능 변화를 추출하여 MCV 성능의 최 소 값, 최대 값을 모두 데이터화 한다.
(5) (4)의 결과에서 요구도 만족을 유지하는 설계 치 수 조합들을 식별한다.
(6) 구조해석을 활용하여, (5)에서 식별한 설계 치수 조합들의 구조적 타당성을 검토한다.
(7) (6)에서 식별한 설계 치수 조합들에 대해 성능 여유를 수치화한 후, 가장 안정적으로 요구도를 만족 할 수 있는 설계 치수 조합을 식별한다.
5.2 모델을 활용한 요구도 준수 설계
4.2절에서와 같이 𝑊{𝑎,𝑑}, 𝑊{𝑏,𝑐}, 𝑂{𝑎,𝑑}, 𝑂{𝑏,𝑐}, 𝑟𝑐 의 MCV 주요 설계 변수를 고려하고, 해석 결과를 추출한 다. 각 설계 변수는 가공 공차에 의해 최소, 기본, 최 대 값이 발생한다. 단, 𝑟𝑐 는 가공 가능한 설계 치수를 기본 값으로 하고, 가공공차에 의한 최대 값을 고려하 여 2가지 경우를 설계 범위로 하였다. 따라서 가공공 차에 의한 162가지 경우의 성능해석 결과를 비교할 수 있으며, 해석 결과를 Fig. 13에서 Fig. 18과 Table 4에 나타내었다.
Fig. 13 Tolerance Analysis Results for Maximum Flow Rate
Fig. 14 Tolerance Analysis Results for Null Flow Gain
Fig. 15 Tolerance Analysis Results for ±25% Flow Gain
Fig. 16 Tolerance Analysis Results for Null Pressure Gain
Fig. 17 Tolerance Analysis Results for Null Coincidence
Fig. 18 Tolerance Analysis Results for Null Leakage Table 4 Tolerance Analysis Results
Requirement Analysis Result Compared With Requirement
1) Maximum Flow Rate
-1.2%(min)/-0.4%(base)/
+0.4% (max) 2) Null Flow
Gain
-34.1%(min)/-24.7%(base)/
-17.3(max) 3) ±25% Flow
Gain
-1.8%(min)/+0.7%(base)/
+3.1%(max) 4) Null
Pressure Gain +3.9%(min)/+61.7%(base) 5) Null
Coincidence
-23.1%(min)/-0.4%(base)/
+22.7%(max) 6) Null
Leakage -71.0%(base)/-41.0%(max)
Table 4의 결과를 Table 3의 결과와 비교하였을 때, 가공공차에 의해 성능 여유가 줄어드는 것을 확인할 수 있다. 특히, 성능 2), 5)의 경우 가공공차에 의한 성 능변화의 최소, 최대 값이 성능 1), 3)에 비해 상대적 으로 크다. 이는 가공공차 발생 값이 1 um ~2 um 안 에 있는 것을 고려하였을 때, 매우 극적인 것으로 보 여진다. 또한 성능 4), 6)은 요구도가 범위로 주어지지 않았고, 각각 하한선, 상한선으로 주어졌음에도 불구하 고, 가공공차에 의한 성능 변화가 30% 이상인 것으로 확인된다. MCV 설계 변수들의 1-6) 성능에의 영향성 이 서로 다른 것을 고려하였을 때, 위의 결과는 반응 성이 빠름에도 불구하고 상대적으로 성능 여유가 적은 언더 랩(underlap) 설계를 선택하지 않는 이유가 된다.
언더 랩 설계와 최대 가공공차를 적용하였을 때 중 립누설(null leakage) 요구도 6)을 만족하면서 다른 요 구도를 동시에 만족시키는 설계 치수를 찾는 것은 어 려웠다. 여기서 성능 6)은 오버 랩 설계 적용 시 𝑊{𝑎,𝑑}, 𝑊{𝑏,𝑐}, 𝑂{𝑎,𝑑}, 𝑂{𝑏,𝑐}, 𝑟𝑐 가 각각 최대, 최대, 최소, 최소, 최대 값이 될 때 최대 누유가 발생한다. 이는 Overlap 구간의 유량을 지배하는 식에서 유량이 MCV 슬롯의 너비와 스풀-슬리브 간 틈새가 클수록, Overlap 구간 길이가 작을수록 유량이 증가한다는 점 에서 분명하게 확인된다. 결론적으로, 제4-5장의 과정 을 통해 MCV를 설계한 결과 제3장에서 명시된 엄격 한 MCV 요구도를 모두 만족시키며, 가공공차에 의한 성능저하를 고려하더라도, 성능 여유를 확보 할 수 있 는 것을 확인할 수 있다.
6. 결론 및 앞으로의 과제
항공기에 적용되는 플랩제어시스템의 제어 모듈 부 분 모델을 활용하여 핵심 부품인 MCV의 요구도 만족 을 확인하였다. 본 논문의 설계 과정 및 결과는 항공 기 플랩제어시스템의 주제어밸브 설계 시 기존의 경험 에 근거한 반복-오차 방식과는 별개로 모델에 기반한 알려진 설계 결과가 없다는 점에서 의의가 있다. 해석 결과, 허용된 가공공차 적용 시에도 성능 여유를 확보 하면서 요구도를 여전히 만족함을 확인함으로써, MCV 설계를 선제적으로 완료할 수 있었다. 앞으로의 과제 는 다음과 같다.
1) 부분 검증 시험을 위한 주제어밸브, 고장-안전 밸브의 시제품을 제작하고, 성능 시험결과를 추출하여 모델 해석 결과와 비교 검증한다.
2) 해석-시험 간 오차로부터 세부 설계 변수들을 조 정하고, 시험 과정 상의 오류를 식별하는데 활용한다.
3) 전체 시스템 모델에 연결하여 전체 플랩제어시스 템의 상세 모델을 완성한다.
현재의 MCV 모델을 수정, 발전시켜 제어 모듈 개발 에 성공적으로 활용할 수 있으며, 개발 과정에서 필연 적으로 발생하는 시간, 경제적 자원들을 단축시킬 수 있을 것으로 생각된다.
References
[1] H. Cho, C. Joo, K. Kim, and S. Park, “Performance analysis model for flap actuation system using MATLAB/Simulink,” International Journal of Aerospace System Engineering, vol. 4, no. 1, pp. 13-21, Jun. 2017.
[2] Y. Nam and H. Park, “Analysis on the dynamics characteristics of a DDV actuation system of a FBW aircraft,” Journal of the Korean Society for Aeronautical and space Sciences, vol. 34, no. 3, pp. 74-80, Mar. 2006.
[3] G. Yoon, H. Park, and K. Jang, “The state of the art and application of actuator in Aerospace,” Journal of the Korean Society of Propulsion Engineers, vol. 14, no. 6, pp.
89-102, Dec. 2010.
[4] D. Noh, Y. Yoon, D. Kim, S. Kim, S. Kim, S. Park, K.
Choi, and J. Jang, “Development and application of thermal hydraulic simulation model for aircraft- EHA(Electro-Hydrostatic Actuator),” Journal of the Korean Society for Simulation, vol. 23, no. 2, pp. 17-24, 2014.
[5] M. Ahn and H. Cho, “Study on mathematical modeling for hydraulic control performance of main control valve having rectangular slots,” Proc. of SASE Fall Conference 2017, Busan, Korea, pp. 399-400, Nov. 2017.
[6] Y. Kim, H. Yoon, and S. Kim, “A Model-based design and testing approach for the UAV flight control computer,”
Proc. of the Korean Society for Aeronautical and Space Sciences 2015, Jeongseon, Korea, pp. 620-633, Apr. 2015.
[7] H. Park, S. Jang, S. Baek, and J. Byun, “HILS simulation model integration guidelines using Model-based design and MATLAB Simulink,” Proc. of the Korean Society for Aeronautical and Space Sciences 2016, Jeju, Korea, pp.
796-797, Nov. 2016.
[8] D. Han, Y. Kim, C. Lee, D. Lee, and K. Cho, “A study on verify of UAV flight control software simulated flight using Model-based development and X-plane simulator,”
Journal of the Korean Society for Aeronautical and Space Sciences, vol. 43, no. 2, pp. 166-171, Feb. 2015.
[9] J. Park, S. Baek, and Y. Kim, “A study on dynamic characteristics for systems selector valve in power package of KT-1 hydraulic system using AMESim,” Proc.
of the Korean Society for Aeronautical and Space Sciences 2011, Yongpyong, Korea, pp. 992-996, Nov.
2011.
[10] Y. Chung, S. Park, C. Jeong, Y. Jeong, and S. Yang, “A study on modeling and simulation of hydraulic system for a wheel loader using AMESim,” Journal of the Korean Fluid Power Systems Society, vol. 7, no. 4, pp. 1-8, Dec.
2012.
[11] K. Lee and K. Song, “Research trends and development applications on mobile hydraulic using AMESim,”
Journal of the Korean Society of Fluid Power and Construction Equipments, vol. 9, no. 1, pp. 52-55, 2012.
[12] C. Joo, “Model design for performance analysis of leading-edge flap actuation system,” Proc. of the SASE Fall Conference 2016, Muju, Korea, pp. 416-417, Nov.
2016.
[13] W. Borutzky, Bond graph modeling of engineering systems, 1st Ed., Springer, Berlin, 2011.
[14] X. Pan, G. Wang, and Z. Lu, “Flow field simulation and a flow model of servo-valve spool valve orifice,” Journal of the Energy Conversion and Management, vol. 52, no. 10, pp. 3249-3256, 2011.
[15] H. E. Merritt, Hydraulic Control Systems, 1st Ed., John Wiley & Sons Inc., New York, 1991.
![Fig. 1 Three Physical Domain of Flap Control System 하지만 초정밀 유량 제어 밸브를 설계하는 경우 초 기 설계 단계에서부터 해석에 기반한 설계로 초기 접 근해야만 원하는 성능에 쉽게 접근할 수 있으며 비용 및 일정의 부담을 줄일 수 있다[5]](https://thumb-ap.123doks.com/thumbv2/123dokinfo/5101546.326696/2.892.107.793.149.404/physical-하지만-초정밀-밸브를-설계하는-단계에서부터-해석에-근해야만.webp)