논문 2012-49-10-4
위성항법시스템기반의 위치오차에 관한 연구
( A Study of Positioning Error Based on the Satellite Navigation System )
박 지 호*, 김 남 혁***
( Chi-Ho Park and Nam-Hyeok Kim )
요 약
본 논문은 위성항법시스템을 이용한 정밀 단독측위에 관한 연구이다. 위성항법시스템이 가지고 있는 내재적인 문제점인 장 애물 등 여러 가지 환경 요인으로 인해 신호를 수신할 수 없는 경우 음영지역과 위치오차 증가 등에 관한 연구논문이다. 논문 에서는 다양한 수신기의 성능 분석과 대도로 중앙, 대도로 측면, 주택가, 고층 건물 주변의 골목길 등 다양한 환경에 따른 위 성 수 와 DOP(Dilution of Precision)변화 그리고 위치오차의 변화 등을 분석하였다. 그리고 환경 변화에 따른 위치오차 발생 범위와 오차 원인을 파악하여, 위성항법시스템의 신뢰성과 안정성을 높이는데 그 목적이 있다.
Abstract
This paper is a study on precise point positioning using global navigation satellite system. This paper studies inherent barriers of global navigation satellite system such as increase in shadowed areas and positioning errors when signals cannot be received due to various environmental factors. It analyzes performance of various receivers, changes in number of satellite and DOP(Dilution of Precision) following changes in environment such as center of a road, side of a road, residential area, high building, and alleys. It also studies changes in positioning error. The objective of this study lies on understanding the range of positioning error following changes in environment and the cause of error, and enhancing the reliability and safety of the global navigation satellite system.
Keywords: Satellite Navigation System, Dilution of Precision
Ⅰ. 서 론
위성항법시스템(GPS : Global Positioning System)은 미국방성에 의해 군사적 목적으로 개발된 위성을 이용 한 전파항법 시스템이다. GPS는 군사적 임무의 효과적 수행을 위해 개발되어 그 유용성은 이미 증명되었고, 최근에는 민간으로 더 많이 응용되고 있으며, 자동차,
* 정회원-교신저자, 대구경북과학기술원 IT융합연구부
(Division of IT Convergence, Daegu Gyeongbuk Institute of Science & Technology)
※ 본 연구는 교육과학기술부에서 지원하는 대구경북 과학기술원 기관고유사업에 의해 수행되었습니다.
(과제번호 : 12-IT-02)
접수일자: 2012년4월30일, 수정완료일: 2012년10월8일
항공기, 인공위성, 선박 등의 위치센서로서 각광을 받고 있다. 이러한 위성은 미국의 GPS이외에 구소련의 GLONASS도 민간에 개방되면서 활용도가 더욱 다양해 지고 있으며, 유럽연합의 Galileo, 중국의 Beiduo/
Compass, 일본의 QZSS 등과 같은 추가적인 위성의 활 용이 가능해 지고 있다.[1∼3] 최근에는 이러한 다양한 위 성들을 통합하고, 기존 시스템을 보완한 전지구적인항 법위성시스템(GNSS : Global Navigation Satellite System)을 연구하고 발전시키고 있다.[4∼7] 하지만 이러 한 노력에도 불구하고 위성항법시스템을 이용한 위치결 정 발전에는 한계가 있다. 여러 가지 내재적인 문제점 이 있지만 그 중 가장 심각한 문제점은 장애물이나 다
른 이유로 위성이 가려져 제대로 수신을 할 수 없어 발 생하는 위치오차의 증가와 실외 음영지역이다. 실제로 전지구의 47%가 실외음영지역이다. 다시 말하면 위성 항법시스템을 이용한 위치결정을 수행하는 경우 전 지 구의 47%에서는 사용할 수 없다는 것이다.[8] 이러한 결 정적인 문제점을 가지고 있는 위성항법시스템은 활용도 에서도 한계를 보여주고 있으며, 신뢰성과 안정성 문제 점은 항상 지적되고 있다. 따라서 본 논문에서는 이러 한 문제점과 신뢰성의 범위를 분석하기 위하여 가용 위 성 수 변화에 따른 DOP 변화와 위치오차의 범위 그리 고 현재 사용 가능한 수신기들의 성능 분석을 통한 수 신기의 문제점 등을 실험을 통해 분석하려고 한다. 또 한, 환경변화로 인한 위성항법시스템의 오차변화율과 원인도 분석한다.
Ⅱ. 본 론
위성항법시스템을 이용한 위치결정은 항상 4개 이상 의 위성으로부터 신호를 수신해야 위치결정이 가능하 다. 하지만 도심지나 산 또는 주택 밀집지역 등에서는 여러 가지 장애물로 인해 항상 4개 이상의 위성을 이용 한 위치결정이 불가능하다. 이러한 경우, 위치오차가 심 각하게 커지거나 음영지역이 발생하게 된다. 이러한 상 황으로 인해 위성항법시스템을 이용한 위치결정은 신뢰 성과 안정성에 심각한 문제점을 보이고 있다. 그림 1은 기본적인 위성항법시스템을 이용한 측정 방정식을 나타 낸다.[1∼4]
그림 1에서 의사거리 측정방정식은 식 1과 같다.
그림 1. 위성항법시스템의 의사거리 측정
Fig. 1. Pseudorange Measurement of Satellite Navigation System.
(1)
여기서, 는 송신시스템 시간, 는 자유공간에서 의 전달 시간=R/C, 는 대류권과 전리층의 지연 시 간, 는 사용자 클럭 편의(bias), 는 위성 클 럭 편의(Bias)이다.
위성항법시스템을 이용한 위치결정을 하는 경우 각 각의 위성으로부터 위의 식과 같은 수식을 만들어 위 치계산을 하게 된다. 그러나 도심지역에서는 고층건물 이나 장애물로 인해 4개 이상의 위성으로부터 신호를 수신받기가 어렵기 때문에 식 4와 같은 식을 만들기가 어렵다. 이러한 이유로 위치결정의 오차가 커지거나, 음영지역이 발생하게 되는 것이다. 따라서 본 논문에서 는 여러 환경에서 가용 위성 수 변화에 따른 DOP변화, 수신기 별 성능 차이, 그리고 위치 오차를 비교 분석 하였다.
Ⅲ. 실 험
1. Novatel사의 DL-V3 수신기
본 실험은 Novatel사의 DL-V3수신기와 CHC사의 B20 그리고 일반적인 GPS수신기 BU-353으로 동시에 대도시 중앙도로, 대도시 측면도로, 고층건물 주변 골목 길, 주택가 그리고 산악지역의 DOP를 측정하였다.
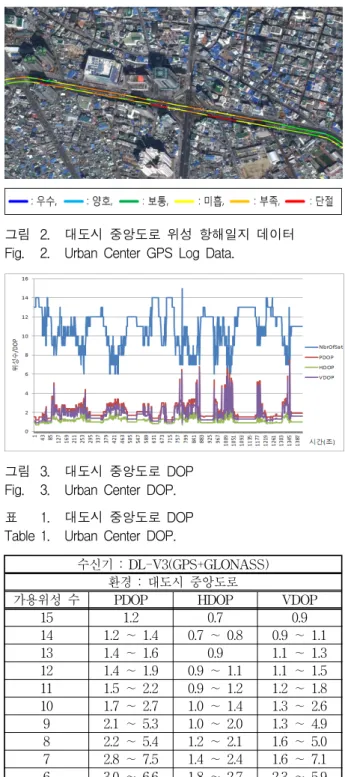
그림 2부터 11까지는 Novatel사의 DL-V3수신기를 사용한 실험 결과이다. 그리고 표 1부터 5는 Novatel사 의 DL-V3수신기를 사용한 경우 가용위성 수 변화에 따른 DOP변화를 나타낸다. 그림 2는 대도시 중앙도로 에서의 위성항법시스템을 적용한 경우 위치오차를 측정 하기위한 위성 항해일지 데이터(GPS Log Data)를 나 타낸다.
그림 3은 대도시 중앙도로에서의 위성항법시스템을
그림 2. 대도시 중앙도로 위성 항해일지 데이터 Fig. 2. Urban Center GPS Log Data.
그림 3. 대도시 중앙도로 DOP Fig. 3. Urban Center DOP.
수신기 : DL-V3(GPS+GLONASS) 환경 : 대도시 중앙도로
가용위성 수 PDOP HDOP VDOP
15 1.2 0.7 0.9
14 1.2 ∼ 1.4 0.7 ∼ 0.8 0.9 ∼ 1.1
13 1.4 ∼ 1.6 0.9 1.1 ∼ 1.3
12 1.4 ∼ 1.9 0.9 ∼ 1.1 1.1 ∼ 1.5 11 1.5 ∼ 2.2 0.9 ∼ 1.2 1.2 ∼ 1.8 10 1.7 ∼ 2.7 1.0 ∼ 1.4 1.3 ∼ 2.6 9 2.1 ∼ 5.3 1.0 ∼ 2.0 1.3 ∼ 4.9 8 2.2 ∼ 5.4 1.2 ∼ 2.1 1.6 ∼ 5.0 7 2.8 ∼ 7.5 1.4 ∼ 2.4 1.6 ∼ 7.1 6 3.0 ∼ 6.6 1.8 ∼ 2.7 2.3 ∼ 5.9
* DOP 10이상은 의미를 부여하지 않고 10으로 한정함.
표 1. 대도시 중앙도로 DOP Table 1. Urban Center DOP.
적용한 경우 위치오차를 측정하기 위한 DOP변화를 측 정하였다.
표 1은 대도시 중앙도로에서의 가용위성 수 변화에 따른 HDOP(Horizontal Dilution of Precision)와 PDOP(Position Dilution of Precision) 그리고 VDOP(Vertical Dilution of Precision)변화를 나타내고 있다.
그림 4. 대도시 측면도로 위성 항해일지 데이터 Fig. 4. Urban Side GPS Log Data.
그림 5. 대도시 측면도로 DOP Fig. 5. Urban Side DOP.
수신기 : DL-V3(GPS+GLONASS) 환경 : 대도시 측면도로
가용위성 수 PDOP HDOP VDOP
14 1.5 0.8 1.2
13 1.5 ∼ 1.6 0.8 ∼ 0.9 1.2 ∼ 1.3 12 1.5 ∼ 1.9 0.9 ∼ 1.1 1.2 ∼ 1.6 11 1.6 ∼ 2.2 0.9 ∼ 1.2 1.4 ∼ 1.9 10 1.7 ∼ 3.0 1.0 ∼ 1.6 1.4 ∼ 2.7 9 1.8 ∼ 5.9 1.0 ∼ 2.3 1.4 ∼ 5.5 8 2.1 ∼ 7.6 1.1 ∼ 3.5 1.6 ∼ 7.4 7 2.3 ∼ 7.7 1.4 ∼ 3.2 1.7 ∼ 6.7 6 3.2 ∼ 10 1.9 ∼ 6.2 2.2 ∼ 10
* DOP 10이상은 의미를 부여하지 않고 10으로 한정함.
표 2. 대도시 측면도로 DOP Table 2. Urban Side DOP.
그림 4는 대도시 측면도로에서의 위성항법시스템을 적용한 경우 위치오차를 측정하기위한 위성 항해일지 데이터를 나타낸다.
그림 5는 대도시 측면 도로에서의 위성항법시스템을 적용한 경우 위치오차를 측정하기 위하여 DOP변화를 측정하였다.
표 2는 대도시 측면 도로에서의 가용위성 수 변화에
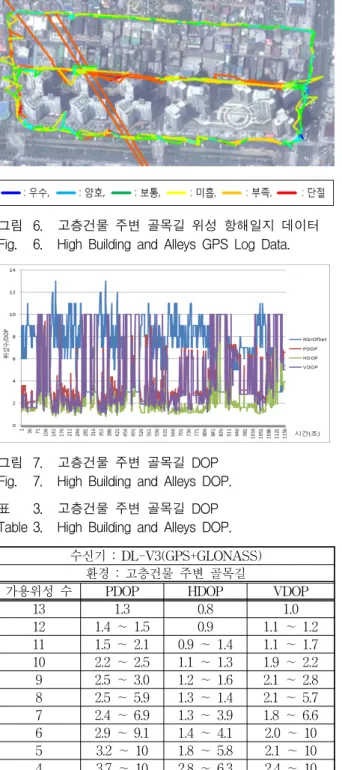
그림 6. 고층건물 주변 골목길 위성 항해일지 데이터 Fig. 6. High Building and Alleys GPS Log Data.
그림 7. 고층건물 주변 골목길 DOP Fig. 7. High Building and Alleys DOP.
수신기 : DL-V3(GPS+GLONASS) 환경 : 고층건물 주변 골목길
가용위성 수 PDOP HDOP VDOP
13 1.3 0.8 1.0
12 1.4 ∼ 1.5 0.9 1.1 ∼ 1.2
11 1.5 ∼ 2.1 0.9 ∼ 1.4 1.1 ∼ 1.7 10 2.2 ∼ 2.5 1.1 ∼ 1.3 1.9 ∼ 2.2 9 2.5 ∼ 3.0 1.2 ∼ 1.6 2.1 ∼ 2.8 8 2.5 ∼ 5.9 1.3 ∼ 1.4 2.1 ∼ 5.7 7 2.4 ∼ 6.9 1.3 ∼ 3.9 1.8 ∼ 6.6 6 2.9 ∼ 9.1 1.4 ∼ 4.1 2.0 ∼ 10 5 3.2 ∼ 10 1.8 ∼ 5.8 2.1 ∼ 10 4 3.7 ∼ 10 2.8 ∼ 6.3 2.4 ∼ 10
* DOP 10이상은 의미를 부여하지 않고 10으로 한정함.
표 3. 고층건물 주변 골목길 DOP Table 3. High Building and Alleys DOP.
따른 DOP변화를 나타내고 있다.
그림 6은 고층건물 주변 골목길에서의 위성항법시스 템을 적용한 경우 위치오차를 측정하기위한 위성 항해 일지 데이터를 나타낸다.
그림 7은 고층건물 주변 골목길에서의 위성항법시스 템을 적용한 경우 위치오차를 측정하기 위하여 DOP변 화를 측정하였다.
그림 8. 주택가 위성 항해일지 데이터 Fig. 8. Residential Area GPS Log Data.
그림 9. 주택가 DOP
Fig. 9. Residential Area DOP.
수신기 : DL-V3(GPS+GLONASS) 환경 : 주택가
가용위성 수 PDOP HDOP VDOP
13 1.5 ∼ 2.0 0.8 ∼ 1.0 1.2 ∼ 1.7 12 1.5 ∼ 2.0 0.9 ∼ 1.1 1.3 ∼ 1.7 11 1.6 ∼ 2.3 0.9 ∼ 1.3 1.3 ∼ 2.0 10 1.8 ∼ 2.5 1.0 ∼ 1.4 1.4 ∼ 2.2 9 2.2 ∼ 3.2 1.2 ∼ 1.7 2.0 ∼ 3.0 8 2.3 ∼ 5.5 1.2 ∼ 2.2 2.0 ∼ 5.3 7 2.7 ∼ 6.4 1.4 ∼ 4.1 2.0 ∼ 6.2 6 2.8 ∼ 8.1 1.5 ∼ 4.2 2.0 ∼ 7.0 5 3.1 ∼ 10 1.8 ∼ 7.4 2.6 ∼ 10
4 5.4 2.7 4.7
* DOP 10이상은 의미를 부여하지 않고 10으로 한정함.
표 4. 주택가 DOP Table 4. Residential Area.
표 3은 고층건물 주변 골목길에서의 가용위성 수 변 화에 따른 DOP변화를 나타내고 있다.
그림 8은 주택가에서의 위성항법시스템을 적용한 경 우 위치오차를 측정하기위한 위성 항해일지 데이터를 나타낸다.
그림 9는 주택가에서의 위성항법시스템을 적용한 경우 위치오차를 측정하기 위하여 DOP변화를 측정하
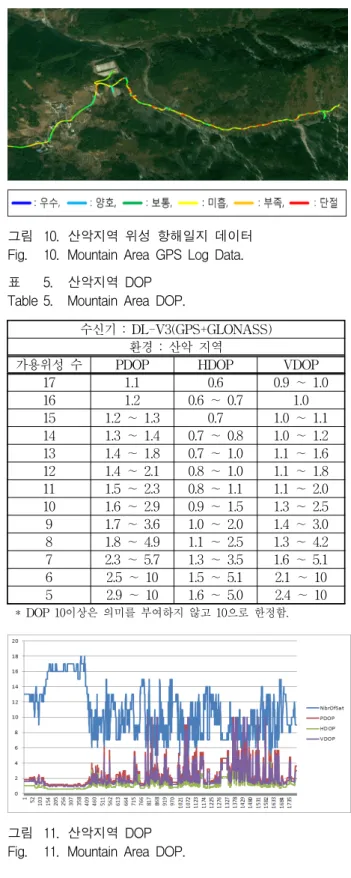
그림 10. 산악지역 위성 항해일지 데이터 Fig. 10. Mountain Area GPS Log Data.
수신기 : DL-V3(GPS+GLONASS) 환경 : 산악 지역
가용위성 수 PDOP HDOP VDOP
17 1.1 0.6 0.9 ∼ 1.0
16 1.2 0.6 ∼ 0.7 1.0
15 1.2 ∼ 1.3 0.7 1.0 ∼ 1.1
14 1.3 ∼ 1.4 0.7 ∼ 0.8 1.0 ∼ 1.2 13 1.4 ∼ 1.8 0.7 ∼ 1.0 1.1 ∼ 1.6 12 1.4 ∼ 2.1 0.8 ∼ 1.0 1.1 ∼ 1.8 11 1.5 ∼ 2.3 0.8 ∼ 1.1 1.1 ∼ 2.0 10 1.6 ∼ 2.9 0.9 ∼ 1.5 1.3 ∼ 2.5 9 1.7 ∼ 3.6 1.0 ∼ 2.0 1.4 ∼ 3.0 8 1.8 ∼ 4.9 1.1 ∼ 2.5 1.3 ∼ 4.2 7 2.3 ∼ 5.7 1.3 ∼ 3.5 1.6 ∼ 5.1 6 2.5 ∼ 10 1.5 ∼ 5.1 2.1 ∼ 10 5 2.9 ∼ 10 1.6 ∼ 5.0 2.4 ∼ 10
* DOP 10이상은 의미를 부여하지 않고 10으로 한정함.
표 5. 산악지역 DOP Table 5. Mountain Area DOP.
그림 11. 산악지역 DOP Fig. 11. Mountain Area DOP.
였다.
표 4는 주택가에서의 가용위성 수 변화에 따른 DOP 변화를 나타내고 있다.
그림 10은 산악지역에서의 위성항법시스템을 적용한 경우 위치오차를 측정하기위한 위성 항해일지 데이터를
나타낸다.
그림 11은 산악지역에서의 위성항법시스템을 적용한 경우 위치오차를 측정하기 위하여 DOP변화를 측정하 였다.
표 5는 산악지역에서의 가용위성 수 변화에 따른 DOP변화를 나타내고 있다.
2. 일반적인 저가 수신기
그림 12부터 21까지는 일반적인 수신기를 사용한 실 험 결과이다. 그리고 표 6부터 10은 일반적인 수신기를
그림 12. 대도시 중앙도로 위성 항해일지 데이터 Fig. 12. Urban Center GPS Log Data.
그림 13. 대도시 중앙도로 DOP Fig. 13. Urban Center DOP.
수신기 : 일반 수신기(GPS) 환경 : 대도시 중앙도로
가용위성 수 PDOP HDOP VDOP
10 1.3 ∼ 1.4 0.8 1.1
9 1.4 ∼ 1.6 0.9 ∼ 1.0 1.1 ∼ 1.4 8 1.5 ∼ 2.7 0.9 ∼ 1.7 1.2 ∼ 2.2 7 1.9 ∼ 3.0 1.1 ∼ 1.8 1.5 ∼ 2.5 6 3.7 ∼ 6.8 2.0 ∼3 .5 3.2 ∼ 5.8
* DOP 10이상은 의미를 부여하지 않고 10으로 한정함.
표 6. 대도시 중앙도로 DOP변화 Table 6. Urban Center DOP.
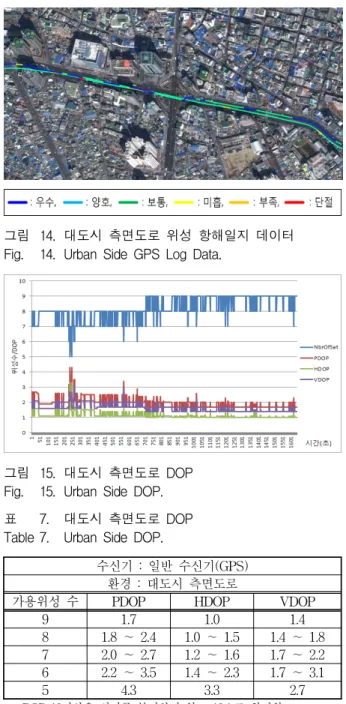
그림 14. 대도시 측면도로 위성 항해일지 데이터 Fig. 14. Urban Side GPS Log Data.
그림 15. 대도시 측면도로 DOP Fig. 15. Urban Side DOP.
수신기 : 일반 수신기(GPS) 환경 : 대도시 측면도로
가용위성 수 PDOP HDOP VDOP
9 1.7 1.0 1.4
8 1.8 ∼ 2.4 1.0 ∼ 1.5 1.4 ∼ 1.8 7 2.0 ∼ 2.7 1.2 ∼ 1.6 1.7 ∼ 2.2 6 2.2 ∼ 3.5 1.4 ∼ 2.3 1.7 ∼ 3.1
5 4.3 3.3 2.7
* DOP 10이상은 의미를 부여하지 않고 10으로 한정함.
표 7. 대도시 측면도로 DOP Table 7. Urban Side DOP.
사용한 경우 가용위성 수 변화에 따른 DOP변화를 나 타낸다. 그림 12는 대도시 중앙도로에서의 위성항법시 스템을 적용한 경우 위치오차를 측정하기위한 위성 항 해일지 데이터를 나타낸다.
그림 13은 대도시 중앙도로에서의 위성항법시스템을 적용한 경우 위치오차를 측정하기 위하여 DOP변화를 측정하였다.
표 6은 대도시 중앙도로에서의 가용위성 수 변화에 따른 DOP변화를 나타내고 있다.
그림 14는 대도시 측면도로에서의 위성항법시스템을 적용한 경우 위치오차를 측정하기위한 위성 항해일지
그림 16. 고층건물 주변 골목길 위성 항해일지 데이터 Fig. 16. High Building and Alleys GPS Log Data.
그림 17. 고층건물 주변 골목길 DOP Fig. 17. High Building and Alleys DOP.
수신기 : 일반 수신기(GPS) 환경 : 고층건물 주변 골목길
가용위성 수 PDOP HDOP VDOP
10 1.4 ∼ 1.5 0.9 1.1 ∼ 1.2
9 1.5 ∼ 1.7 0.9 ∼ 1.0 1.2 ∼ 1.4 8 1.6 ∼ 2.5 1.0 ∼ 1.4 1.2 ∼ 2.0 7 1.7 ∼ 2.8 1.2 ∼ 1.5 1.3 ∼ 2.3 6 2.1 ∼ 3.2 1.5 ∼ 2.1 1.5 ∼ 2.9 5 2.7 ∼ 3.7 1.8 ∼4.0 2.1 ∼ 3.0
* DOP 10이상은 의미를 부여하지 않고 10으로 한정함 표 8. 고층건물 주변 골목길 DOP
Table 8. High Building and Alleys DOP.
데이터를 나타낸다.
그림 15는 대도시 측면도로에서의 위성항법시스템을 적용한 경우 위치오차를 측정하기 위하여 DOP변화를 측정하였다.
표 7은 대도시 측면도로에서의 가용위성 수 변화에 따른 DOP변화를 나타내고 있다.
그림 16은 고층건물 주변 골목길에서의 위성항법시 스템을 적용한 경우 위치오차를 측정하기위한 위성 항 해일지 데이터를 나타낸다.
그림 17은 고층건물 주변 골목길에서의 위성항법시
그림 18. 주택가 위성 항해일지 데이터 Fig. 18. Residential Area GPS Log Data.
그림 19. 주택가 DOP
Fig. 19. Residential Area DOP.
수신기 : 일반 수신기(GPS) 환경 : 주택가
가용위성 수 PDOP HDOP VDOP
8 2.0 ∼ 2.6 1.3 ∼ 1.6 1.5 ∼ 2.4 7 1.7 ∼ 3.1 1.3 ∼ 1.7 1.3 ∼ 2.6 6 2.1 ∼ 4.6 1.5 ∼ 2.5 1.5 ∼ 3.9 5 2.1 ∼ 5.8 1.5 ∼ 3.8 1.5 ∼ 4.3 4 2.2 ∼ 5.8 1.5 ∼ 3.8 1.6 ∼ 4.3 3 4.4 ∼ 4.7 2.6 ∼ 3.0 3.2 ∼ 3.9
* DOP 10이상은 의미를 부여하지 않고 10으로 한정함.
표 9. 주택가 DOP
Table 9. Residential Area DOP.
스템을 적용한 경우 위치오차를 측정하기 위하여 DOP 변화를 측정하였다.
표 8은 고층건물 주변 골목길 도로에서의 가용위성 수 변화에 따른 DOP변화를 나타내고 있다.
그림 18은 주택가에서의 위성항법시스템을 적용한 경 우 위치오차를 측정하기위한 위성 항해일지 데이터를 나타낸다.
그림 19는 주택가에서의 위성항법시스템을 적용한 경우 위치오차를 측정하기 위하여 DOP변화를 측정하 였다.
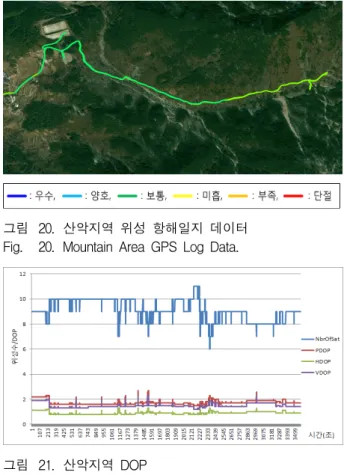
그림 20. 산악지역 위성 항해일지 데이터 Fig. 20. Mountain Area GPS Log Data.
그림 21. 산악지역 DOP Fig. 21. Mountain Area DOP.
수신기 : 일반 수신기(GPS) 환경 : 산악 지역
가용위성 수 PDOP HDOP VDOP
11 1.5 0.8 1.2
10 1.5 ∼ 1.6 0.8 ∼ 0.9 1.3 ∼ 1.4 9 1.6 ∼ 2.2 0.8 ∼ 1.1 1.3 ∼ 2.0 8 1.8 ∼ 2.7 0.9 ∼ 1.3 1.5 ∼ 2.3 7 1.8 ∼ 2.7 1.1 ∼ 1.3 1.5 ∼ 2.3
6 2.3 1.3 1.9
* DOP 10이상은 의미를 부여하지 않고 10으로 한정함.
표 10. 산악지역 DOP Table 10. Mountain Area DOP.
표 9는 주택가에서의 가용위성 수 변화에 따른 DOP 변화를 나타내고 있다.
그림 20은 산악 지역에서의 위성항법시스템을 적용 한 경우 위치오차를 측정하기위한 위성 항해일지 데이 터를 나타낸다.
그림 21은 산악지역에서의 위성항법시스템을 적용한 경우 위치오차를 측정하기 위하여 DOP변화를 측정하 였다.
표 10은 산악지역에서의 가용위성 수 변화에 따른 DOP변화를 나타내고 있다.
3. CHC사의 B20 수신기
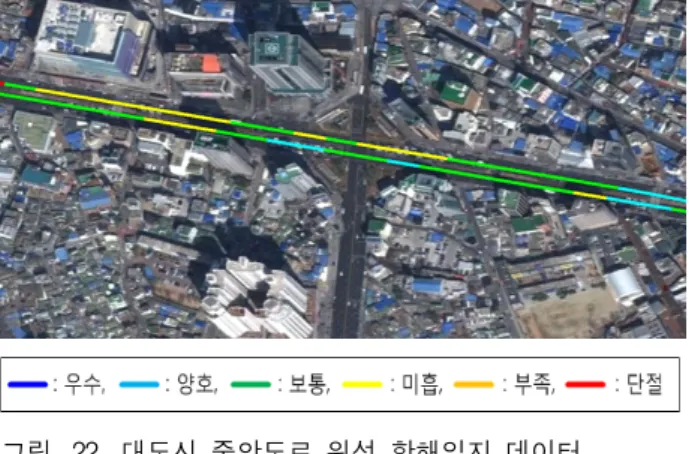
그림 22부터 31까지는 CHC사의 B20 수신기를 사용 한 실험 결과이다. 그리고 표 11부터 15는 CHC사의 B20 수신기를 사용한 경우 가용위성 수 변화에 따른 DOP변화를 나타낸다. CHC사의 B20은 비콘(Beacon)신 호를 수신하여 보정데이터로 사용한다. 그림 22는 대도 시 중앙도로에서의 위성항법시스템을 적용한 경우 위치 오차를 측정하기위한 위성항해일지 데이터를 나타낸다.
그림 23은 대도시 중앙도로에서의 위성항법시스템을 적용한 경우 위치오차를 측정하기 위하여 DOP변화를
그림 22. 대도시 중앙도로 위성 항해일지 데이터 Fig. 22. Urban Center GPS Log Data.
그림 23. 대도시 중앙도로 DOP Fig. 23. Urban Center DOP.
수신기 : B20(GPS) 환경 : 대도시 중앙도로
가용위성 수 PDOP HDOP VDOP
8 1.7 ∼ 3.0 1.0 ∼ 2.0 1.4 ∼ 2.2 7 1.7 ∼ 3.4 1.0 ∼ 1.8 1.4 ∼ 2.8 6 2.1 ∼ 3.5 1.2 ∼ 2.2 1.5 ∼ 3.1 5 2.5 ∼ 10 1.5 ∼ 6.3 2.7 ∼ 10 4 3.9 ∼ 10 2.4 ∼ 10 3.1 ∼ 10
* DOP 10이상은 의미를 부여하지 않고 10으로 한정함.
표 11. 대도시 중앙도로 DOP Table 11. Urban Center DOP.
측정하였다.
표 11은 대도시 중앙도로에서의 가용위성 수 변화에 따른 DOP변화를 나타내고 있다.
그림 24는 대도시 측면도로에서의 위성항법시스템을 적용한 경우 위치오차를 측정하기위한 위성 항해일지 데이터를 나타낸다.
그림 25는 대도시 측면도로에서의 위성항법시스템을 적용한 경우 위치오차를 측정하기 위하여 DOP변화를 측정하였다.
표 12는 대도시 측면도로에서의 가용위성 수 변화에
그림 24. 대도시 측면도로 위성 항해일지 데이터 Fig. 24. Urban Side GPS Log Data.
그림 25. 대도시 측면도로 DOP Fig. 25. Urban Side DOP.
수신기 : B20(GPS) 환경 : 대도시 측면도로
가용위성 수 PDOP HDOP VDOP
8 1.9 ∼ 2.0 1.1 1.6 ∼ 1.7
7 2.0 ∼ 3.3 1.2 ∼ 1.6 1.6 ∼ 2.2 6 2.2 ∼ 4.0 1.4 ∼ 2.9 1.7 ∼ 3.1 5 2.9 ∼ 10 1.5 ∼ 4.6 2.0 ∼ 10 4 3.3 ∼ 10 2.0 ∼ 10 2.5 ∼ 10
* DOP 10이상은 의미를 부여하지 않고 10으로 한정함.
표 12. 대도시 측면도로 DOP변화 Table 12. Urban Side DOP.
그림 26. 고층건물 주변 골목길 위성항해일지 데이터 Fig. 26. High Building and Alleys GPS Log Data.
그림 27. 고층건물 주변 골목길 DOP Fig. 27. High Building and Alleys DOP.
수신기 : B20(GPS) 환경 : 고층건물 주변 골목길
가용위성 수 PDOP HDOP VDOP
7 2.4 ∼ 2.9 1.4 ∼ 1.8 2.0 ∼ 2.3 6 2.6 ∼ 3.7 1.5 ∼ 2.2 2.1 ∼ 2.7 5 3.1 ∼ 7.6 1.9 ∼ 4.0 2.2 ∼ 6.9 4 4.2 ∼ 10 2.0 ∼ 10 2.7 ∼ 10
* DOP 10이상은 의미를 부여하지 않고 10으로 한정함.
표 13. 고층건물 주변 골목길 DOP Table 13. High Building and Alleys DOP.
따른 DOP변화를 나타내고 있다.
그림 26은 고층건물 주변 골목길에서의 위성항법시스 템을 적용한 경우 위치오차를 측정하기위한 위성 항해 일지 데이터를 나타낸다.
그림 27은 고층건물 주변 골목길에서의 위성항법시 스템을 적용한 경우 위치오차를 측정하기 위하여 DOP 변화를 측정하였다.
표 13은 고층건물 주변 골목길에서의 가용위성 수 변 화에 따른 DOP변화를 나타내고 있다.
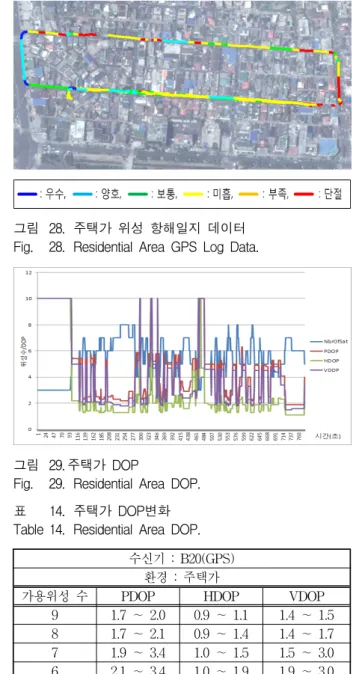
그림 28은 주택가에서의 위성항법시스템을 적용한 경우 위치오차를 측정하기위한 위성 항해일지 데이터를
그림 28. 주택가 위성 항해일지 데이터 Fig. 28. Residential Area GPS Log Data.
그림 29. 주택가 DOP
Fig. 29. Residential Area DOP.
수신기 : B20(GPS) 환경 : 주택가
가용위성 수 PDOP HDOP VDOP
9 1.7 ∼ 2.0 0.9 ∼ 1.1 1.4 ∼ 1.5 8 1.7 ∼ 2.1 0.9 ∼ 1.4 1.4 ∼ 1.7 7 1.9 ∼ 3.4 1.0 ∼ 1.5 1.5 ∼ 3.0 6 2.1 ∼ 3.4 1.0 ∼ 1.9 1.9 ∼ 3.0 5 2.3 ∼ 5.4 1.5 ∼ 3.3 1.9 ∼ 4.4 4 3.7 ∼ 10 1.9 ∼ 7.1 3.1 ∼ 9.3 3 3.7 ∼ 6.8 2.0 ∼ 3.5 3.2 ∼ 5.8
* DOP 10이상은 의미를 부여하지 않고 10으로 한정함.
표 14. 주택가 DOP변화 Table 14. Residential Area DOP.
나타낸다.
그림 29는 주택가에서의 위성항법시스템을 적용한 경우 위치오차를 측정하기 위하여 DOP변화를 측정하 였다.
표 14는 주택가에서의 가용위성 수 변화에 따른 DOP 변화를 나타내고 있다.
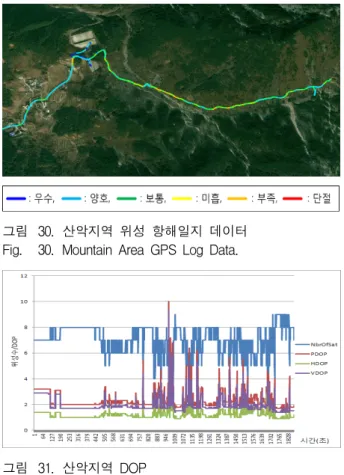
그림 30은 산악지역에서의 위성항법시스템을 적용한 경우 위치오차를 측정하기위한 위성 항해일지 데이터
그림 30. 산악지역 위성 항해일지 데이터 Fig. 30. Mountain Area GPS Log Data.
그림 31. 산악지역 DOP Fig. 31. Mountain Area DOP.
수신기 : B20(GPS) 환경 : 산악 지역
가용위성 수 PDOP HDOP VDOP
9 1.7 ∼ 2.0 0.9 ∼ 1.1 1.4 ∼ 1.7 8 1.7 ∼ 3.1 0.9 ∼ 1.4 1.4 ∼ 2.8 7 1.8 ∼ 3.2 1.0 ∼ 1.4 1.5 ∼ 3.0 6 2.0 ∼ 3.3 1.0 ∼ 1.9 1.7 ∼ 3.0 5 2.7 ∼ 5.2 1.5 ∼ 3.3 1.8 ∼ 4.4 4 3.7 ∼ 10 1.9 ∼ 7.1 3.1 ∼ 9.3 3 3.7 ∼ 6.8 2.0 ∼ 3.5 3.2 ∼ 5.8
* DOP 10이상은 의미를 부여하지 않고 10으로 한정함.
표 15. 산악지역 DOP Table 15. Mountain Area DOP.
를 나타낸다.
그림 31은 산악지역에서의 위성항법시스템을 적용한 경우 위치오차를 측정하기 위하여 DOP변화를 측정하 였다.
표 15는 산악지역에서의 가용위성 수 변화에 따른 DOP변화를 나타내고 있다.
Ⅳ. 결 론
본 논문에서는 다양한 환경에서의 수신기 별 DOP변 화와 위치오차에 대한 실험을 하였다. 위의 실험에서 알 수 있듯이 환경에 따라 위치오차가 얼마나 많이 발 생하는지 파악 할 수 있다. 특히 그림 6은 주변에 30∼
40층 높이의 건물들과 편도 1차선의 좁은 골목길이 있 는 환경으로 위성의 수신이 어렵고, 멀티패스가 심한 열악한 환경이다. 이 환경에서의 위치오차는 심한 곳이 700∼800m 이상 발생하는 곳도 있다. 또한 그림 8의 환 경은 2층 높이의 건물들로 이루어진 주택가 이다. 주변 환경이 열악하지 않으나 한쪽 측면에 높은 건물들로 인 해 위치오차가 600∼700m이상 발생하는 것을 알 수 있 다. 이 정도의 위치오차 값은 위치 값 결정에서 의미를 갖지 못 한다. 이러한 위치오차가 발생하는 원인은 여 러 가지가 있겠지만 주된 원인은 가용위성 수 부족과 멀티패스인 것으로 파악되었다. 특히 확인된 결과에 의 하면 멀티패스 발생 가능성이 높은 환경에서 더욱 위치 오차가 증가한다는 것을 알 수 있었다. 따라서 위성항 법시스템의 정밀도를 향상시키기 위해서는 가용위성 수 를 증가시키는 알고리듬 제안도 중요하지만 높은 빌딩 숲에서 발생하는 멀티패스의 발생에 대한 대책도 시급 한 과제이다.
참 고 문 헌
[1] Elliott D. Kaplan, Understanding GPS : Principles and Applications, Artech House, 1996 [2] Bradford W. Parkinson, James J. Spiker Jr., et
al., Global Positioning System : Theory and Applications, Volume I and Volume II, American Institute of Aeronautics and Astronautics. 1996.
[3] Pratap Mistra, Per Enge, Global Positioning System : Signals, Measurements and Performance, Ganga-Jamuna Press, 2001.
[4] James Bao-yen Tsui, Fundamentals of Blobal System Receivers A Software Approach, John Wiley & Sons, Inc. 2000.
[5] Kai Borre, Dennis M. Akos, Nicolaj Bertelsen, Peter Rinder, Soren Holdt Jensen, A Software-defined GPS and Galileo Receiver, Birkhauser, 2000.
[6] Ramjee Prasad, Marina Ruggieri, Applied Satellite Navigation Using GPS, Galileo, and
저 자 소 개 박 지 호(정회원)
1998년 남서울대학교 정보통신 공학과 학사 졸업.
2001년 광운대학교 전자통신 공학과 석사 졸업.
2008년 광운대학교 전자통신 공학과 박사 졸업.
현재 대구경북과학기술연구원 선임연구원
<주관심분야 : 스테레오 비전, 스테레오 매칭, HW 아키텍쳐>
김 남 혁(정회원)
2009년 서울시립대학교 공간정보 공학과 졸업(학사)
2009년~2011년 9월 (주)팅크웨어 GIS 연구소 연구원 2011년 9월~현재 DGIST 연구원
<주관심분야 : 공간정보공학, GPS, ITS>
Augmentation Systems, Artech House, 2005.
[7] B.Hofmann-Wellenhof, H.Lichtenegger, J.Collins, 서용철 옮김, GPS 이론과 응용, 시그마프레스, [8] Chi-ho Park, Soon Kwon, Chung-Hee Lee,
Woo-Young Jung, “A Study of a Reliable Positioning Based on Technology Convergence of a Satellite Navigation System and a Vision System,” 대한전자공학회지, 제48권 TC편 10호, p20∼p28.