자료의 지면정보 추출기법의 정확도 평가 LiDAR
Accuracy Assessment of Ground Information Extracting Method from LiDAR Data
최연웅* ・ 최내인** ・ 이준환*** ・ 조기성****
Choi, Yun Woong ・ Choi, Nei In ・ Lee, Joon Whoan ・ Cho, Gi Sung
要 旨
본 연구에서는LiDAR자료로부터의 지면정보 추출기법들에 대한 정확도를 평가하였다 특히 포인트 형태의 벡터자. , 료인LiDAR원시자료를 직접 활용하는 기법과 정규격자형식의DSM형식으로 변형하여 활용하는 기법의 정확도를 비교하였다 정규격자형식의 자료를 이용하는 방법으로는 경계추출 및 필터링 기법을 이용하는 방법 평균필터링에. , 의하여 생성된 추세면을 이용하는 방법을 적용하였으며 벡터구조의 원시, LiDAR자료를 직접 활용하는 기법으로써
및 엔트로피를 이용하는 방법을 적용하였다 또한 수작업을 통하여 제작된 및 수치지도의
Local Maxima . , DEM
축척별 오차허용범위를 이용하여 정확도 평가를 수행하였으며 경계검출 및 필터링 추세면, , , Local Maxima,엔트로 피를 이용한 각 기법의DEM의 평균 오차는0.27m, 2.43m, 0.13m, 0.10m로써 엔트로피를 이용한 방법이 가장 높은 정확도를 나타내었다 또한 벡터형식의. , LiDAR원시자료를 직접 이용하는 방법이 격자형식으로 변환하는 방법에 비하여 상대적으로 높은 정확도를 나타내었다.
핵심용어
:
LiDAR, 수치표고모형 지면정보추출 정확도평가, ,Abstract
This study assessed the accuracies of the ground information extracting methods from the LiDAR data. Especially, it compared two kinds of method, one of them is using directly the raw LiDAR data which is point type vector data and the other is using changed data to DSM type as the normal grid type. The methods using Local Maxima and Entropy methods are applied as a former case, and for the other case, this study applies the method using edge detection with filtering and the generated reference surface by the mean filtering. Then, the accuracy assessment are performed with these results, DEM constructed manually and the error permitted limit in scale of digital map. As a results, each DEM mean errors of methods using edge detection with filtering, reference surface, Local Maxima and Entropy are 0.27m, 2.43m, 0.13m and 0.10m respectively. Hence, the method using entropy presented the highest accuracy. And an accuracy from a method directly using the raw LiDAR data has higher accuracy than the method using changed data to DSM type relatively.
Keywords : LiDAR, DEM, Ground Information Extraction, Accuracy Assessment
연구논문서 론 1.
정확한 지형정보를 획득하려는 연구는 인류가 생겨나 면서부터 시작되었으며 대표적인 차원 정보의 취득방, 3 법으로는 항공영상 위성영상 직접측량 등을 이용하는, , 방법이 있다 그러나 대량의 자료를 한번에 취득하기 어. , 려울 뿐만 아니라 처리과정 및 처리방법이 매우 복잡함
에도 불구하고 여러 분야에서 필요로 하는 소요정확도를 만족시키지 못하는 실정이다 그러나 최근 차원 정보. , 3 취득방법으로써 대량의 자료를 직접 취득할 수 있으며, 그 처리과정의 자동화가 가능한LiDAR(Light Detection
시스템이 등장하였다 And Range) .
LiDAR 시스템은 GPS(Global Positioning System), 레이저 주사기 INS(Inertial Navigation System), (Laser 년 월 일 접수 년 월 일 채택
2006 8 30 , 2006 10 9
* 교신저자 전북대학교 공업기술연구센터 연구원 공학박사・ , ([email protected])
** 비회원 유 대산이엔씨 대표이사 전북대학교 토목공학과 박사과정・( ) , ([email protected])
*** 비회원 전북대학교 전자정보공학부 교수・ ([email protected])
**** 정회원 전북대학교 토목공학과 교수 공업기술연구센터 연구원・ , ([email protected])
가지의 첨단 장비가 결합된 시스템으로써 레이
Scanner) 3 ,
저가 물체에 반사되는 정보 그 순간의, GPS와INS정보를 통합하여 대상물의 직접적인 3차원정보를 획득한다.
시스템을 통해 취득된 정보는 차원 포인트
LiDAR 3 (X,Y,Z)
형태의 자료로써 부가적으로 레이저의 반사강도, (Intensity) 정보 멀티리턴, (Multi Return)정보를 함께 취득할 수 있다. 또한 일부 시스템에서는 디지털카메라를 보조장비로 장착 함으로써 대상지역에 대한 항공사진도 취득할 수 있다.
시스템의 등장으로 인하여 기존 항공사진측량 LiDAR
에 비하여 효율적이고 경제적으로 대량의 차원 정보를, 3 획득할 수 있게 되었으며, DEM(Digital Elevation Model) 과 같은 차원 자료 구축과정의 자동화 가능성 또한 증가3 하였다 그러나. , LiDAR시스템에서는 레이저 펄스가 투 과하지 못하는 건물지역 등에서는 수목과 같은 자연지물 및 건물 등의 인공지물이 모두 포함된DSM(Digital Surface 형식의 자료를 취득하게 되어 시스템으로
Model) LiDAR
부터 취득한 DSM으로부터DEM을 추출하기 위해서는 건물 등의 지물을 제거하는 전처리 과정이 필요하다 이( 근상,2003).특히 수치지도에서는 표고정보를 취득할 수, 없는 건물 등의 인공지물이 제거된DEM과 같은 지면정 보는 홍수범람예측 및 홍수위험지도 제작 해수면 상승, 에서의 인공지물의 영향 등을 예측하는데 중요한 자료로 사용될 수 있다.
따라서 최근 도심지, DEM제작을 위하여LiDAR자료 로부터 건물객체와 같은 비지면 자료를 분류하기 위한 다양한 알고리즘이 개발되었다 이와 관련하여. , Sithole과 은 기존에 발표된 가지 서로 다른 알고 Vosselman(2003) 8
리즘을 적용하고 결과를 비교하였으며 국내에서는 유환, 희 등(2005)이LiDAR원시 자료를 정규격자형식으로 변 환하고 서로 다른 가지 필터링 기법을 적용하여 고층건3 물과 저층건물지역에서의 적용결과를 분석한바 있다.
그러나 대부분의 선행연구들에서는 자료변환 과정에, 서 원시자료의 정확도를 유지할 수 없는 단점에도 불구 하고 수치해석상의 잇점을 이유로 포인트 형태의 벡터자 료인LiDAR원시자료를 정규격자 형식으로 변환하여 사 용하고 있다.
본 연구에서는 선행연구들에서 제시된 바 있는LiDAR 자료로부터 지면정보를 추출하는 기법들에 대한 정확도 를 평가하고자 한다 특히 포인트 형태의 벡터자료인. , 원시자료를 직접 활용하는 기법과 정규격자형식 LiDAR
의DSM형식으로 변형하여 활용하는 기법의 정확도를 비교함으로써 상대적으로 정확한 차원 정보의 취득이3 어려운 도심지역에 대한 지형정보 취득기법의 정확도를 평가하는데 목적이 있다.
연구내용 2.
본 연구에서는 먼저 LiDAR 원시자료로부터 LiDAR 을 생성하였으며 정규격자형식의 자료를 이용하는
DSM ,
방법으로는 라플라시안(Laplacian) 연산자를 이용하여 추 출된 경계에 대하여 중간값 필터링을 수행함으로써 건물지 역을 제거하고DEM을 생성하는 방법 최연웅 등( , 2005) ,과 전체지역에 대한 평균필터링에 의하여 생성된 추세면을 이 용하여 건물지역을 제거함으로써DEM을 생성하는 방법 (Priestnall et. al., 2000;Jaafar and Priestnall, 1999;Jaafar et.
을 사용하였다 al., 1999) .
벡터구조의 원시LiDAR자료를 직접 활용하는 기법으로 써 엔트로피(Entropy)이론을 적용하여LiDAR포인트를 군 집화하여 분류하는 기법 최연웅( , 2005)과Local Maxima를 이용한 기법 김형태( , 2000)을 적용하여 건물 지역의LiDAR 포인트를 제거하고DEM을 생성하였다.
또한 최종적으로는 수작업을 통하여 전체, LiDAR자 료중 건물 포인트를 제거하여 구축한DEM을 정확도 평 가를 위한 기준자료로 활용하여 각 기법에 대한 정확도 를 평가하였다.
적용 및 고찰 3.
연구대상지역 및 자료구축 3.1
본 연구의 대상지역은 경상남도 마산시 일원으로써 특 히, LiDAR자료 처리 기법의 도심지에서 건물의 높이에 따른 지면정보 분류 정확도를 평가할 수 있도록 높은건 물과 낮은건물이 복합적으로 분포하고 있는 지역을 연구 대상지역으로 하였다 이 지역은 지면으로부터 약. 30m의 높은 건물과5m의 낮은건물이 분포하고 있으며 특히 건, 물들이 조밀하게 분포하고 있어 지면정보를 분류하는데 어려움이 많은 지역이다 그림 은 대상지역에 대한 항공사. 1
그림
1. 연구대상지역
진으로 자료 취득시CCD카메라로부터 취득된 영상이다. 사용된 LiDAR 시스템은 캐나다Optech사의 ALTM
레이저 스케너 사의
3070 , Novatel Millenium 2000 GPS 및Applanix LN 200 INS로 구성되어있으며 비행설계내, 역은 표 과 같다1 .
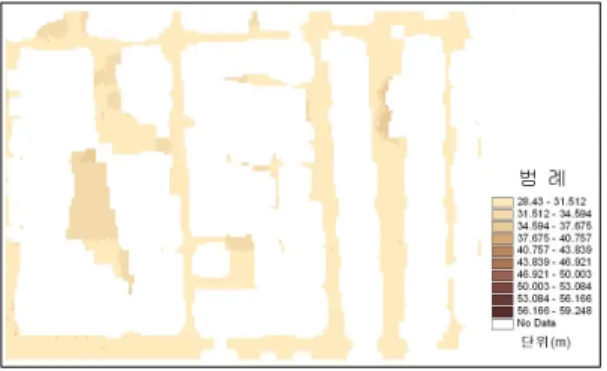
또한 그림, 2및 그림 은 각각 연구대상지역 표고 분포3 와 대상지역에 대하여 원시자료로부터 제작된1m DSM 을 나타낸다.
경계검출 및 필터링 알고리즘을 이용하는 방법 3.2
이 방법은 그림 에서와 같이 취득된4 LiDAR원시자료 를 이용하여DSM을 생성하고 경계검출 알고리즘을 이 용하여 경계를 추출한 후 경계로 추출된 셀에 대하여 필 터링을 수행하는 과정을 계속 반복하여DSM상의 건물들
을 모두 제거하는 방법으로써 경계검출 알고리즘과 필터, 링 기법을 혼합하여 사용하였다.
본 연구에서는 경계검출 알고리즘과 필터링 기법으로 검출된 경계의 윤곽선들이 폐곡선을 이루고 명암이 점차, 적으로 변화되는 영역에 대해서는 반응을 보이지 않으며, 다른 연산자들 보다 더욱 뚜렷한 경계를 검출하는 특징을 갖는 라플라시안 연산자 최형일 외( , 1997)를 사용하였다. 또한 낮은지역을 확장시키거나 지역내 표고값을 평준, 화 시키는 최소값 필터 및 평균값 필터에 비하여 상대적 으로 우수한 결과를 나타내는 중간값 필터를 적용하여 건물지역을 제거하였다.
먼저 취득된 대상지역에 대한1m해상도의DSM으로 부터 라플라시안 연산자를 이용하여 최초의 첫 번째 에 지를 추출한다 에지로 추출된 셀에 대하여. 5×5크기의 중간값 필터를 적용하였으며 필터링, 과정에서 선택되는 개의 셀 중 이미 경계로 추출된 셀은 연산에서 제외하 24
였다 또한 연산에 사용되는 셀의 개수가 최소 개를 넘. , 9 지 않는 경우 필터의 크기를 증가시키도록 하여 주변 셀 의 영향을 충분히 반영할 수 있도록 하였으며 경계검출, 과정에서 필터링까지의 과정을 더 이상의 경계셀이 추출 되지 않을 때까지 반복함으로써DSM상의 건물들을 모 두 제거하여 대상지역에 대한DEM을 추출하였다.
그림 는 라플라시안 연산자를 이용한 대상지역5 DSM 표
1. 비행설계내역
항목 제원
비행고도 1400m
점 밀도 0.5points/m2
주사 빈도 70kHz
최대 주사 범위 20°
그림
2. 대상지역의
LiDAR 표고 분포그림
3. 대상지역 DSM
그림
4. 추출된 경계에 대한 필터링 개요
그림
5. 최초 경계검출결과
의 최초 경계검출 결과로써 잡음에 민감한 라플라시안, 연산자의 특성상 다소 많은 에지가 검출되었으나 잡음, 을 제거하기 위하여 가우시안 스무딩 등의 작업을 선행 하는 경우 최초DSM을 변형시킬 수 있으며 본 연구에서, 적용한 기법은 검출된 경계셀이 잡음에 의하여 잘못 검 출 되었다 하더라도 결과적으로는 검출된 에지셀이 모두 주변셀에 의하여 제거되기 때문에 본 연구에서는 잡음 제거를 위한 작업은 수행하지 않았다.
또한 그림 은 경계검출 알고리즘을 이용하여 지면정, 6 보를 추출하여 제작된 대상지역DEM을 나타낸다.
평균필터링에 의한 추세면을 이용하는 방법 3.3
이 방법은 취득된LiDAR 원시자료를 이용하여DSM 을 생성하고 가장 간단한 선형 필터로서 일반적으로 잡 음을 제거하기 위한 평활화 기법으로 사용되는 평균필터 링을 수행하여 생성된 추세면을 이용하는 방법으로써, 평균 필터링에 의하여 생성된 추세면은 그림 에서와 같7 이 건물과 같이 높은 지역보다는 낮은쪽에 지면과 같이, 낮은 지역보다는 높은쪽에 위치하게 된다.
따라서 생성된 추세면과 원시, DSM과의 차연산을 이 용하여 추세면보다 높은 건물지역은 제거함으로써 원시
으로부터 건물지역을 제거한다
DSM .
먼저 최초 생성된1m DSM으로부터3×3부터39×39까 지 대상지역내의 가장 큰 건물이 제거 될 때까지 다양한 크기의 필터를 적용하여 평균필터링을 수행하여 추세면 을 생성하였으며 생성된, DEM과 최초DSM과의 차연산 을 통하여 건물지역을 제거하였다 그러나. , LiDAR자료 의 불규칙적인 분포와 보간에 의한 영향에 따라 건물 경 계선이 불규칙한 모양을 보일 뿐만 아니라 건물에 의한 폐색지역에서는 자료 취득이 누락되어DSM 제작시 건 물의 경계선부분이 매끄럽게 생성되지 않는 문제점들이 있다 따라서 추출된 건물지역 주변으로. 2m의 버퍼지역 을 형성하여 건물지역과 함께 제거하였으며 그림 과 같, 8 은 결과를 나타내었다 또한 그림 는 추세면을 이용하. , 9 여 제작한 대상지역DEM이다.
를 이용하는 방법 3.4 Local Maxima
를 이용하는 방법은 벡터 형식의
Local Maxima LiDAR
그림
6. 경계검출 및 필터링 알고리즘을 이용하여 제작된
DEM0 10 20 30 40 50 60 70 80 90 100
0 5 10 15 20 25 30 35 40
거리(m) 높이(m)
LiDAR DSM 추세면
지표면 지표면
건물
그림
7. 추세면에 의한 지형지물 제거 기법
그림
8. 추세면을 통한 건물지역 제거결과
그림
9. 추세면을 이용하여 제작된 DEM
자료를 격자형식의DSM으로 변환하지 않고 직접 사용 하는 방법으로 그림10에서와 같이 필터의 크기와 높이 임계값을 가정하고 필터에 포함된 지역의 최저 높이값을 계산한 후 계산된 최저 높이 보다 이미 가정된 임계값, 이상 높은 지역을 선택하는 방법이다.
필터의 크기와 높이 임계값은 건물에 대 Local Maxima
한 사전지식을 활용하여 정해지는 변수로서 높이의 임, 계값은 건물 최소 높이값을 고려하여 정해져야 한다 또. 한 필터의 크기는 건물을 포함할 수 있을 정도의 크기로, 정해져야 하며 필터의 경사가 대상지역 경사도 보다 크, 도록 선택되어야 한다 즉 경사가 급한 언덕에 존재하는. , 건물을 분할해 내기 위해서는 건물이 높고 최대건물의 크기가 작아 필터의 크기가 작을수록 유리하다 그러나. , 대상지 내에 큰 건물이 존재하는 경우 필터 크기가 커져 야 하지만 지면 경사가 큰 지역에서는 지면이 건물로 분 할되어 버리는 문제가 발생할 수 있다 따라서 이러한. , 경우 작은 크기의 필터를 사용하여 건물을 분할하고 문, 제 지역에 대해서 편집해주는 과정이 필요하다.
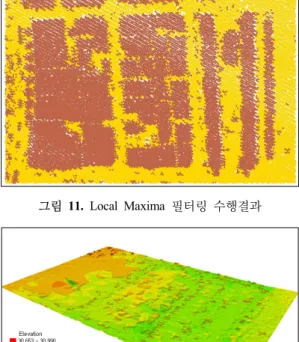
본 연구에서는 초기가정으로 대상지역내 비교적 큰 건 물을 기준으로 건물의 최대크기를35m로 가정하였으며, 건물의 최저높이는 일반적인 아파트의 층 높이인1 2.5m 로 가정하였다 그림. 11은 대상지역에 대한 필터링을 수 행결과를 나타내며 그림, 12는 원시LiDAR자료로부터 지면 포인트를 추출하고 추출된 지면포인트만을 이용하 여 제작한 DEM을 나타낸다.
엔트로피를 이용하는 방법 3.5
엔트로피를 이용하는 방법은 원시LiDAR자료의 표고 값에 대한 엔트로피를 계산하고 이를 이용하여 건물등의 경계지역 포인트들을 추출하며 추출된 경계 포인트들을, 표고값에 대하여 군집화 하여 분류함으로써 지면 및 비 지면 정보를 추출하는 방법이다.
엔트로피는 물리학에서 기원하였으며 이론적으로는,
물질계가 흡수하는 열량과 절대온도와의 비로 정의되며, 적용하는 분야에 따라 열역학적 엔트로피 통계적 엔트, 로피 정보이론적 엔트로피로 구분할 수 있다, .
은 정보이론적 관점에서 엔트로피를 식 과
Shannon (1)
같이 정의 하였다(Shannon, 1948).
(1)
단, 는 사건 가 발생할 확률이며,
≦ ≦
의 엔트로피에 관한 정의에서 엔트로피는 확 Shannon
률에 관한 함수로서 확률이50%일 때 최대값을 갖는다. 이를DSM과 같은 차원자료에 적용하는 경우 지면과 같3 이 표고값 분포가 일정한 지역에서는 임의의 한 점이 지 면 혹은 건물을 나타내게 될 확률이0혹은 에 가까워짐1 으로써 엔트로피는 낮아지게 된다 반면 지면과 건물의. , 경계지역과 같이 표고값의 분포가 일정하지 않은 지역에
그림
10.
Local Maxima필터링 기법의 개념그림
11.
Local Maxima 필터링 수행결과그림
12.
Local Maxima를 이용하여 제작된 DEM서는 임의의 한점이 지면인지 건물인지에 관한 불확실성 이 증가하게 되고 확률은0.5에 가까워짐으로써 엔트로 피가 증가하게 된다.
엔트로피를 이용한 경계검출 알고리즘은 이러한 원리 를 이용하고 있으며 지면자료는 주변의 비지면자료에, 비하여 낮은 표고값을 갖는다는 것과 지면은 갑작스럽게 변화하지 않는다는 단순한 사실에 기반을 두고 있는 다 른 경계추출 알고리즘과는 달리 표고값의 분포가 얼마“ 나 불규칙적인가?”,혹은 얼마나 많은 불확실성을 내포하“ 고 있는가?”하는 사실에 기반을 두고 있다(Bouzouba and Radouane, 2000; Ferraro, et al., 2002).
본 연구에서는 임의의LiDAR포인트에 대하여 일정 반경의 버퍼링을 수행하고 버퍼영역 내의 인접 포인트를 검색함으로써 엔트로피를 계산하는 알고리즘을 적용하 여 벡터형식의LiDAR원시자료에 엔트로피를 이용한 경 계검출 알고리즘을 적용하였다.
임의의LiDAR포인트를 기준으로 주변 지역을 방향8 으로 구분하여 각 지역마다의 포인트를 한 개씩 검색하 고 해당 포인트까지 총 개의 포인트를 이용하여 엔트로9 피를 계산하였으며 그림, 13과 같은 엔트로피 분포 결과 를 나타내었다.
또한 각, LiDAR포인트들에 대한 계산된 엔트로피와 표고값 및 각 포인트들간의 인접성을 고려하여 식별자를 부여함으로써 그림14와 같이 건물 등의 지형지물정보와 지면정보를 분류할 수 있었으며 그림, 15는 이들 중 지면 정보만을 이용하여 제작한DEM을 나타내고 있다.
지면정보 추출 정확도 비교 3.6
본 연구에서는LiDAR원시자료로부터 표고값 및 대상 지역 항공사진을 참고하여 건물지역을 수작업으로 제거 하여 제작한DEM을 기준자료로 활용하여 각 지면정보 추출기법에 대한 추출정확도를 비교하였다 그림. 16은 수작업으로 건물지역LiDAR포인트를 제거하여 제작한 DEM이다.
정확도 비교방법으로는 각각의 방법을 통하여 제작된 의 모든 격자에서의 표고값을 기준 과 비교하
DEM DEM
였으며 수치지도 작업내규상의 축척, 1:1,000수치지도 및 축척1:5,000수치지도에서의 표고값 허용오차인0.3m와
를 만족하지 못하는 격자를 오차로 판정하였다
1.0m .
표 는 수치지도 작업내규 제 장 제 조에서 제시하고2 1 10 있는 수치지도의 축척별 오차의 허용범위이며 표 은 본, 3
그림
15. 엔트로피를 이용하여 제작된 DEM
그림
16. 수작업에 의해 제작된 DEM
그림13. 대상지역 엔트로피 계산 결과
그림
14. 엔트로피를 이용한 지면 포인트 추출 결과
연구에서 적용한 각 지면정보 추출기법에 대한 정확도 비교 결과로써 오차로 판정된 격자의 갯수와 전체 격자 갯수(24,892 )개 에 대한 오차 격자의 비율을 나타낸다.
본 연구에서 적용된 방법들 중 엔트로피를 이용한 방법 의 평균오차가0.10m로 가장 작게 나타났다 또한 전체. , 격자 개수 중 각각87%와99%의 격자가 축척 1:1,000 및 축척1:5,000 수치지도의 표고에 대한 최대 허용오차 범위를 만족하는 것으로 파악되었으며 다른 방법에 비, 해 우수한 결과를 나타내었다.
그러나 추세면을 이용하는 방법에서는 전체 격자 개수, 의56.8%및34.6%가 각각 축척1:1,000및 축척1:5,000 수치지도의 표고 허용오차를 만족하지 못하는 결과를 보 이고 있으며 평균오차 또한, 2.43m로써 매우 크게 나타 났다 이것은 대상지역의 특성이 지면자료 보다는 높은. 표고값을 갖는 건물지역이 많아 전체 지역에 대하여 평 균필터링을 통하여 추세면을 생성하는 과정에서 지면자 료의 영향을 충분히 반영하지 못함으로써 결과적으로 최 종DEM에서 많은 오차를 나타낸 것으로 판단된다 따라. 서 본 연구대상지역과 같이 건물이 밀집되어 나타나 상, 대적으로 지면자료가 불충분한 지역에서는 추세면을 이 용한 방법은 적용이 어려울 것으로 판단된다.
또한 경계검출기법을 이용한 방법에서는 평균오차가, 로 나타났으며 축척 수치지도를 기준으로 전 0.27m , 1:1,000
체 격자의 약70%에 불과했던 최대허용오차범위를 만족하 는 격자의 개수가 축척1:5,000수치지도를 기준으로 할 때 약95%까지 증가하여 비교적 양호한 결과를 보이고 있다. 그러나 격자자료로의 변환을 거치지 않고 벡터형식의,
자료에 직접 적용하는Local Maxima나 엔트로피를 이용 하는 방법은 각각 약84%, 87%의 격자가 축척1:1,000 수치지도 최대허용오차기준을 만족하고 있으며 축척, 수치지도의 최대허용오차기준에 대해서는 각각 1:5,000
의 격자가 기준을 만족하고 있다 또한 평
98.4%, 99.1% . ,
균오차 또한 각각0.13m, 0.10m로써 격자자료로의 변환 과정을 거치는 방법에 비하여 상대적으로 매우 높은 정 확도를 보이고 있다.
따라서, LiDAR자료의 처리시 자료의 구조를 격자구 조로 변환하는 것은 자료의 정확도를 떨어뜨리는 요인이 될 수 있음을 알 수 있다.
특히 엔트로피를 이용하는 기법이, Local Maxima를 이 용하는 기법에 비하여 다소 높은 정확도를 보이고 있다. 이것은Local Maxima를 이용하는 기법은LiDAR원시자 료를 지면자료와 건물지역과 같은 비지면자료로 분류하는 과정에서 초기가정을 만족시키지 못하는 비지면자료를 완 전하게 제거하지 못하는데서 발생하는 것으로 보인다.
결 론 4.
본 연구에서는LiDAR자료로부터 지면정보만을 추출 하는 기법으로 경계검출 알고리즘을 이용하는 방법 추, 세면을 이용하는 방법, Local Maxima를 이용하는 방법, 엔트로피를 이용하는 방법을 적용하여DEM을 생성함으 로써 지면정보를 추출하고 수작업으로 제작된DEM과 각 격자에서의 표고값을 비교함으로써 정확도를 평가하 였으며 다음과 같은 결론을 얻을 수 있었다.
표
2. 수치지도의 축척별 오차의 허용범위
도화축척 표 준 편 차 최 대 오 차
평면위치 등고선 표고점 평면위치 등고선 표고점 비 고
1/1,000 0.2m 0.3m 0.15m 0.4m 0.6m 0.3m
1/5,000 1.0m 1.0m 0.5m 2.0m 2.0m 1.0m
1/25,000 5.0m 3.0m 1.5m 10.0m 5.0m 2.5m
표
3. 적용기법에 대한 오차 격자의 개수 및 평균오차
지면정보 추출방법 오차격자의 개수 오차격자 비율( )
평균오차(m) 축척 1:1,000기준 축척 1:5,000 기준
격자자료 경계검출 7,498(30.1%) 1,268(5.1%) 0.27
추세면 14,137(56.8%) 8,611(34.6%) 2.43
벡터자료 Local Maxima 4,127(16.6%) 388(1.6%) 0.13
엔트로피 3,209(12.9%) 222(0.9%) 0.10
수치지도작성작업내규 제 장 제 조
( 1 10 )
첫째 경계검출 알고리즘 추세면, , , Local Maxima,엔트 로피를 이용하는 방법으로 제작된DEM의 평균 오차는 각각0.27m, 2.43m, 0.13m, 0.10m로써 엔트로피를 이용 한 방법이 가장 높은 정확도를 나타내었다.
둘째 축척, 1:1,000및 축척1:5,000수치지도의 표고에 대한 최대 허용오차를 고려할 때 엔트로피를 이용한 방 법이 전체 격자의 개수 중 각각87%와99%의 격자가 최 대허용오차범위를 만족하였으며 다른 방법에 비해 우수, 한 결과를 나타내었다.
셋째 벡터형식의, LiDAR원시자료로부터 직접 건물지 역을 제거하고 지면정보를 추출하는 방법이 격자형식으 로 변환하는 방법에 비하여 높은 정확도를 나타내었다.
감사의 글
이 논문은2004년도 한국학술진흥재단의 지원에 의하 여 연구되었음.(KRF-2004-042- D0019)
참고문헌
김형태 건물레이어 자동구축을 위한 데이터와
1. , 2000, GIS Lidar
항공사진의 융합 박사학위논문 서울대학교. , .
2.이근상 고덕구 조기성, , , 2003, “항공레이저측량 자료를 이용한 시가지 건축밀도 평가에 관한 연구”,한국지리정보학회지 제, 6
권, 3 , pp. 95-106.호 최연웅 조기성
3. , , 2005, “도시지역LiDAR DSM으로부터DEM추출 기법 연구”,한국지형공간정보학회논문집 제 권 호, 13 , 1 , pp. 19-25.
최연웅 자료로부터 이론을 이용한 건물
4. , 2005, LiDAR Entropy 추출기법 연구 박사학위논문 전북대학교, , . 최형일 이근수 이양원
5. , , , 1997,영상처리 이론과 실제 홍릉과학, 출판사, pp. 100-117
6. Bouzouba, K., and Radouane, L., 2000, “Image identification and estimation using the maximum entropy principle”, Pattern Recognition Letters, Vol. 21, No. 8, pp. 691-700.
7. Ferraro, M., Boccignone, G., and Caelli, T., 2002, “Entro- py-based representation of image information”, Pattern Recognition Letters, Vol. 23, No. 12, pp. 1391-1398.
8. Jaafar, J., Priestnall, G., 1999, “A Critical evaluation of the potential of automated building height extraction from stereo imagery for land use change detection”. In: B. Gittings(ed.).
“Innovations in GIS 6”, Taylor and Francis, London, pp.
213-222.
9. Jaafar, J., Priestnall, G., Mather, P. M., Vieira, C. A., 1999,
“Construction of DEM from LiDAR DSM using morphological filtering”,Proceedings of the 25th International Conference of the Remote Sensing Society, pp. 299-306.
10. Priestnall G., Jaafar J. and Duncan A, 2000, “Extraction urban features from LiDAR digital surface models”, Computers, Environment and Urban Systems, Vol. 24, pp.
65-78.
11. Shannon, C. E., 1948, “A mathematical theory of communication”, The Bell System Technical Journal, Vol. 27, pp. 379-423.