LiDAR 자료를 이용한 을숙도 지역 3차원 습지 구분도 제작
3D Wetlands Classification Mapping of Eulsukdo Area Using LiDAR Data
이재원1)·이기철2)·김용석3)·위광재4)
Lee, Jae One · Yi, Gi Chul · Kim, Yong Suk · We, Kwang Jae
Abstract
In line with the rapid settlement of information society, the demand for geospatial information and its applications are dramatically increasing. The Project of National Geographic Information System(NGIS) is actively on going to meet up-to-dateness and accuracy of geospatial data. It is fact that the public interest in environmental issues is increas- ing than ever in accordance with the restoration of the four major rivers, core project of Green New Deal Policy, and the event of the Ramsar General Meeting.
Because the Nakdong River Estuary is a place of great importance in both aspects of wetland and environment con- servation, a variety of researches related to this area are progressing. Although artificial developments and natural phe- nomena are rapidly changing the topography and ecosystem of this area, the effort to build topographic DB for change monitoring is very slow. This study describes a Lidar surveying project over the restored wetland Eulsukdo, the southermost part of the Nakdong River, to establish precise topographic DB throughout producing 3D topographical maps and wetland classification maps. The results of this study will make a large contribution to the systematic mainte- nance and management for the restored Eulsukdo wetland.
Keywords : Nakdong Estuary, Eulsukdo, Lidar, 3D maps, Wetland classification
초 록
오늘날 신속한 정보화 사회의 정착에 따라 지형공간정보의 수요와 활용이 급격히 증가하고 있으며, 해마 다 변화하는 지형공간자료의 최신성과 정확성을 충족시키기 위해 국가지리정보체계 구축사업이 활발히 진 행되고 있다. 그 중에서도 최근 정부의 뉴딜녹색정책의 핵심인 4대강 살리기 사업, 국제 습지보전 협약인 람 사르(Ramsar) 총회의 개최 등으로 어느 때보다 환경 분야에 대한 관심이 높아지고 있는 실정이다.
한편, 낙동강 하구 지역은 습지는 물론 환경 분야에서의 보전가치가 매우 높아 관련분야에서 다양한 연구 가 진행되고 있다. 하지만, 이 지역은 인위적 개발과 자연 현상으로 인한 지형과 생태계의 변화가 급속히 진 행되고 있으나 이러한 변화 모니터링의 기본자료인 지형 DB 구축은 매우 미흡한 실정이다. 본 연구에서는 이러한 현실을 감안하여 낙동강 하구에 속하는 을숙도 복원습지를 대상으로 항공 LiDAR 측량을 수행하여 3 차원 지형도와 식생분류를 통한 습지 구분도를 제작하여 정밀 지형 DB를 구축하였다. 이러한 정밀 지형 DB 는 향후 을숙도 복원습지의 체계적인 유지관리에 크게 기여할 것으로 사료된다.
핵심어 : 낙동강 하구, 을숙도, 항공 LiDAR, 3차원 지형도, 습지 구분도
1) 정회원·동아대학교 토목해양공학부 교수(E-mail: [email protected]) 2) 동아대학교 도시조경학부 교수(E-mail: [email protected])
3) 교신저자·정회원·동아대학교 토목공학부 공학박사(E-mail: [email protected]) 4) 정회원·한진정보통신(주) GIS기술연구소 차장(E-mail: [email protected])
1. 서 론
습지(Wetland)는 지구상에 존재하는 가장 중요한 자연 생태계 중의 하나이다. 지구상의 습지는 남극을 제외한 지구 표면의 약 7%를 차지하고 있으며 5대주에 걸쳐 열 대 지역으로부터 한대에 이르기까지 골고루 분포되어 있다. 또한 습지는 지구의 수많은 화학, 물리 및 유전인 자의 생산장(source), 저장소(sink) 및 변화의 산실(trans- former)로서 인류에게 오랜 기간 동안 매우 귀중한 역할 을 하고 있으며 습지가 가지고 있는 역할 중 자연적인 기능과 이를 활용한 인공적인 기능 등 그 가치가 매우 크다고 할 수 있다(박수영 등, 2000).
하지만, 습지의 가치에 대하여 국토개발이라는 전제 조건 하에 많은 습지들이 훼손되고 소실되어져 왔으며, 이에 대하여 관련기관에서는 구체적인 실태파악이 이루 어지지 못하고 있는 실정이다.
습지관리에 대한 국내외 연구 동향을 살펴보면, 미국 의 경우 습지 목록 제작을 위하여 수년간에 걸친 습지의 분류체계에 대한 연구를 수행하였으며, 1977년 10월 초 안을 완성하여 미전역을 대상으로 국가습지목록(NWI : National Wetland Inventory)을 제작하였으며, NWI는 미 국 전역을 기후, 지질, 토양 및 식물 등의 습지서식처로 서의 요소와 관리 문제를 고려해 4단계(Domain-Division- Province-Section)로 구분된 10개의 대규모 생태권역으로 구분하여 연구를 수행하고 있다. 그리고 1980년대 미국 오하이오주 자연자원부에서는 Landsat TM 자료에 의한 원격탐사 기법과 GIS를 결합하여 오하이오주 전 지역의 습지목록(OWI : Ohio Wetland Inventory)을 3년간의 자료 를 기반으로 DB를 구축하였다(NWI, 2009).
일본의 경우 1972년부터 지속적인 연구와 조사를 통 하여 내륙과 연안습지에 대하여 체계적인 습지목록을 제작하고 있으며, 최근에는 원격탐사 등 첨단 분석기법 을 활용하여 습지 DB를 구축하고 있다.
국내에서는 1979년 건설교통부에서 간척자원 용도지 역 계획조사를 통하여 처음으로 연안갯벌 등의 습지 면 적을 조사하였으며, 주로 1:75,000과 1:50,000의 지형도 및 해도를 이용하여 분석하였다. 하지만 이러한 조사방 법은 많은 오차가 수반되며 정확한 습지를 구분하기에 는 한계가 있었으며, 국토개간을 위하여 1980~2000년도 에 대규모 매립공사를 실시함으로써 소실되어진 습지 또한 정확히 파악되어지지 못하고 있는 실정이다.
이기철 등(1996)은 Landsat 5호 TM 영상을 이용하여
서해연안 지역에 대한 연안습지 목록 개발에 대하여 원 격탐사 기법을 이용하여 습지를 효과적으로 관리하는 제안을 하였으며, 이기철 등(2004)은 GIS와 RS를 이용하 여 낙동강 하구 일대의 생태계 변화와 상태 관련자료를 GIS DB로 구축하고 생태지도를 작성하였다.
윤성윤(1999)은 내륙습지생태에 대하여 조사하고 이 를 토대로 보전 방안을 제안하였으며, 홍재상(1999)은 해양습지 생태계에 대하여 조사하고 주변 환경에 미치 는 영향에 대하여 분석하였다.
국외에서의 연구는 Barbara 등(2005)은 미국 캘리포니 아 San Dieguito 갯벌 습지에 대하여 1928년, 1945년, 1975년에 대한 항공사진을 이용하여 습지 변화를 분석 하였으며, Rebecca(2005)는 Missouri Coteau 초원의 빙하 지역에 대하여 Landsat ETM+와 SPOT5 영상을 이용하여 습지를 추출하는 연구를 수행하였다.
최근 들어, 습지에 대한 중요성이 많이 부각됨으로서 이에 대한 연구를 점진적이고 체계적으로 수행하고 있 는 실정이다.
본 연구에서는 첨단 측량 기법인 항공 레이져 측량 (Airbone LiDAR Survey) 기법을 적용하여 낙동강 하구 해 안 습지에 대하여 3차원 습지 구분도를 제작하고자 한다.
2. 습지 구분 및 범위
2.1 습지 정의
습지보전법(1999년 8월 7일 시행)에 의하면“습지”란 담수·기수 또는 염수가 영구적 또는 일시적으로 그 표 면을 덮고 있는 지역으로서 내륙습지 및 연안습지를 말 한다. “내륙습지”는 육지 또는 섬안에 있는 호 또는 소 와 하구 등의 지역, “연안습지”는 만조시에 수위선과 지 면이 접하는 경계선으로부터 간조시에 수위선과 지면이 접 하 는 경 계 선 까 지 의 지 역 으 로 정 의 하 고 있 다 (UNDP/GEF, 2004).
람사르(Ramsar)협약에서의 습지는 자연적이든, 인공적 이든, 영구적이든, 임시적이든, 물이 정체되어 있든, 흐 르고 있든, 담수이든, 기수이든, 염수이든 관계없이 소택 지, 습원, 이탄지 또는 물로 된 지역을 말하며, 여기에서 간조시에 수심이 6m를 넘지 않는 해역을 포함하여 지칭 한다. 즉 갯벌, 호수, 하천, 양식장, 해안은 물론 논도 포 함되는 포괄적인 범주로 정의하고 있다(Ramsar, 2008).
미국의 환경보호청(미국 환경부 산하부처)과 미공병단 이 1970년 대 이후 법제정을 목적으로 사용하고 있는
습지의 정의에서는“습지는 빈번히 또는 일정 기간 이상 동안 물에 잠겨 있거나 젖어있는 곳이며, 일반적으로 물 기가 많은 지역에 적응해 살아가는 생물들에게 적당한 식생을 제공해 주는 장소”로 정의한다(NWI, 2009).
2.2 습지의 가치 및 범위
최근에는 개발보다는 보전과 복원의 중요성이 부각되 면서 습지의 가치가 한층 더 높아지고 있다. 이에 대한 습지의 가치는 우선 조류, 어류 등 각종 야생 동물의 서 식처 제공 및 인간의 레크레이션 제공 등의 생태학적 가 치, 그리고 습지 자체는 막대한 물을 저장하고 있으며 자연적으로 형성된 홍수조절기능과 자연 댐 역할을 하 는 수문학적 가치, 또한 습지는 물과 함께 독특한 경관 을 만들어내고, 자연과 함께 역동적인 공간을 창출해내 는 경관적 가치, 마지막으로 수질정화, 수자원확보, 농 업, 교통, 휴양 등의 제공으로 얻는 막대한 경제적 가치 로 평가할 수 있다. 그림 1에는 습지의 범위를 도식적으 로 나타내었다(박수영 등, 2000).
3. 항공 LiDAR 측량 및 처리
3.1 실험범위 및 자료
본 연구를 수행하기 위한 적절한 대안은 우선, 해안 사구 습지가 잘 발달된 지역이어야 하며, 국제적으로 습 지 보전 가치가 중요한 지역일 것이며, 습지 생태계가 잘 보전 되어져 있는 지역이어야 한다. 그리고 향후 4대 강 정비 등으로 인하여 낙동강 하구 습지에 대한 많은 변화가 예상되는 중요한 지역임을 감안하여 연구지역을 낙동강 하구로 설정하게 되었다. 하지만 낙동강 하구 전 지역에 대하여 실험하기에는 그 범위가 너무 넓기 때문
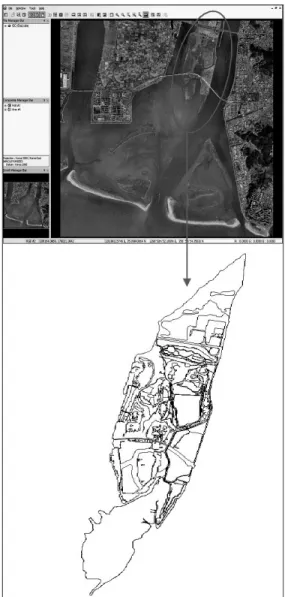
에 습지의 중요한 지역 중 하나인 을숙도 지역으로 한정 하게 되었다. 그림 2에는 연구지역의 현황도와 표 1은 본 연구에 적용된 실험 자료에 대하여 정리하여 제시하 였다.
그림 1. 습지의 범위
그림 2. 연구지역 현황도(낙동강 하구) 표 1. 실험 자료
분 류 취득년도 비 고
항공 LiDAR 수치지형도
2009년 03월 01일 (08:30 ~ 15:00) 2005년(국토지리정보원)
H : 30cm V : 15cm 1 : 5,000
3.2 항공 LiDAR 측량
그림 3에는 항공 LiDAR 촬영의 처리 흐름도를 나타내 었다. 우선 촬영 작업계획을 수립한 후 비행과 보안관련 촬영허가를 득하여야 한다. 촬영허가가 완료되면 영상취 득을 위한 최적의 기상조건을 고려하여 촬영 작업이 수 행되며 대개 구름이 없는 맑은 날, 태양앙각을 고려하여 오전 10시부터 오후 3시 사이에 촬영 작업을 수행한다.
일반적으로 항공사진의 촬영과 LiDAR 촬영을 분리하여 실시하고 있으나 본 연구에서는 디지털 영상과 LiDAR Point 자료를 동시에 취득하였다. 이렇게 취득된 자료로 부터 항공삼각측량, 도화 및 편집과정 등을 거쳐 지형도
제작과 정사사진 및 3차원 입체 동영상 등을 구축하고자 한다. 표 2에는 촬영시 기상조건 및 취득 자료에 대하여 정리하였으며, 2009년 3월 1일 촬영, 최저 저수위는 7cm, 최고 고수위는 153cm, 평균해면은 95.3cm이다.
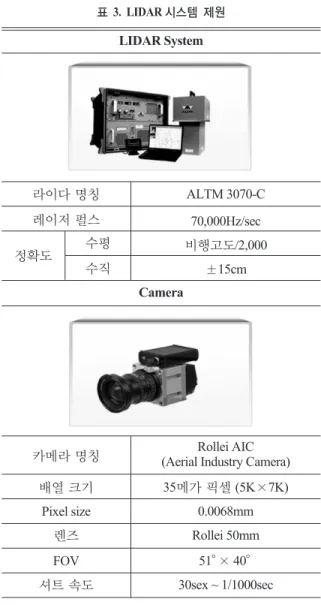
그림 4에는 항공기에 LiDAR 시스템을 설치하는 과정과 촬영허가 후 김포공항에서 이륙하여 연구대상지역에 대 하여 촬영하는 모습을 나타내었다. 그리고 표 3은 LiDAR 시스템과 촬영 카메라의 제원에 대하여 정리하였다.
그림 3. 항공 LiDAR 처리 흐름도
그림 4. 시스템 설치 및 촬영 표 2. 촬영 여건 및 취득 영상
분 류 촬영 사항
기상 조건
최저/최고위 평균해면(MSL)
촬영면적 취득영상수 비행고도(픽셀크기)
2009년 03월 01일 (맑음, 9.5℃, 3.1m/s)
7cm / 153cm (15:58) / (10:53)
95.3cm 63.24㎢
18코스, 451매(80% 중복) 1,300m(23cm)
그림 5에는 연구지역에 대한 촬영코스 설계를 나타내 었다.
3.3 라이다 전처리(GPS/INS)
영상의 외부표정요소를 구하기 위하여 촬영동안 취득 된 GPS와 INS 데이터를 통합하는 전처리 과정을 수행하 였다.(그림 6).
그림 7에는 Raw data에 대한 정보 설정 및 좌표계 설정을 통하여 3차원 Point data를 처리하는 과정을 나타내었다.
표 3. LIDAR 시스템 제원 LIDAR System
Camera 라이다 명칭
레이저 펄스
카메라 명칭 배열 크기
Pixel size 렌즈 FOV 셔트 속도
정확도 수평
수직
ALTM 3070-C 70,000Hz/sec 비행고도/2,000
±15cm
Rollei AIC (Aerial Industry Camera)
35메가 픽셀 (5K×7K) 0.0068mm Rollei 50mm
51。× 40。
30sex ~ 1/1000sec
그림 5. 연구지역 촬영코스 설계
그림 6. 라이다 전처리(GPS / INS)
그림 7. Raw data 처리 과정
3.4 라이다 후처리(DEM, DSM, 등고선도) 처리된 Raw data를 이용하여 후처리과정(정표고 변환, GRS80)을 거쳐 그림 8, 9와 같이 을숙도 지역의 DEM과 DSM을 제작하였다.
표 4에는 라이다 데이터 정보에 대하여 나타내었으며, GRS80좌표계로 변환하여 생성하였다. 그리고 라이다 점 의 총수는 DEM의 경우 약 380만개, DSM의 경우 약 550 만 개 가 생 성 되 어 , 점 밀 도 는 DEM(1.09pt/㎡ ), DSM(1.57pt/㎡)이다.
그림 10은 을숙도 지역에 대하여 20cm 간격의 등고선 을 자동 추출한 결과이다.
4. 3차원 습지 구분도 제작
4.1 습지추출 방법
실험지역의 습지를 구분하기 위하여 아래와 같이 습 지 목록을 정리하여 구분하였다.
그림 8. 을숙도 지형도 제작(DEM)
그림 9. 을숙도 지형도 제작(DSM)
표 4. 라이다 데이터 정보(DEM, DSM) 라이다 데이터 정보(DEM) 좌표계 TM 동부 GRS80
점개수 3,834,530
점밀도(pt./㎡) 1.09
점 사이 간격 1m
라이다 데이터 정보(DSM) 좌표계 TM 동부 GRS80
점개수 5,504,795
점밀도(pt./㎡) 1.57 점 사이 간격 0.5-1.3m
그림 10. 을숙도 등고선 추출(0.2m)
4.1.1 수치도화 및 습지 추출
그림 11에는 을숙도 지역에 대하여 수치도화를 수행 한 결과를 바탕으로 제작된 습지 지역 추출의 기본이 되 는 지형도를 보여주고 있다.
4.1.2 최소 거리법
최소 거리법(Minimum Distance Classifier)은 입력 화소 로부터 모든 분류 항목의 검증 자료에 대한 중심까지의 거리를 계산하여 그 거리가 가장 짧은 분류 항목으로 해 당 화소의 항목을 설정하게 되며 식(1)과 같이 처리한다 (유복모 등, 2003).
(1)
: 영상 자료의 밴드개수
: 해당 화소의 밴드의 수치 화소값 : A분류 항목 검증 자료의 밴드별 평균값
4.2 최소거리법을 통한 식생분류
그림 12에는 다양한 식생분류 기법을 적용한 결과 본 연구에서는 최소거리법이 가장 양호하게 분류되어졌다.
표 5에는 최소거리법 처리를 수행하였으며, Kappa 계수 를 적용하여 정확도 분석을 나타내었다.
그림 11. 을숙도 지역 도화 및 습지추출
그림 12. 감독분류(최소거리법)
표 5. Kappa 계수 정확도 분석
Class Producer's User's
사구 100.00 45.66
도로 0.00 0.00
습지 69.66 48.58
건물 58.22 100.00
논밭 80.20 70.51
해수 96.58 98.25
세모고랭이 33.26 68.16
Overall Accuracy 0.9374 The KHAT Statistic 0.9363
4.3 을숙도 지역 습지 분류
을숙도 지역에 대한 습지 및 토지 구분을 위하여 추출 된 도화 결과와 식생분류를 바탕으로 토지 구분도를 제 작하였다. 표 6에는 을숙도 지역에 대한 토지 구분 비율 을 분석하여 나타내었다. 을숙도 지역의 습지는 을숙도 하단 부분에 대부분 분포하였으며, 이곳의 자연습지 비 율이 약 21% 정도임을 알 수 있었다.
4.4 을숙도 지역 습지 단면도 제작
을숙도 지역에 대하여 습지 단면도를 그림 14와 같이 나타내었다. 을숙도 지역에 대한 등고선 제작을 기반으
로 총 8개의 횡단면도를 나타내었으며, 5번째 단면도에 대하여 습지 구분도를 표현하였다.
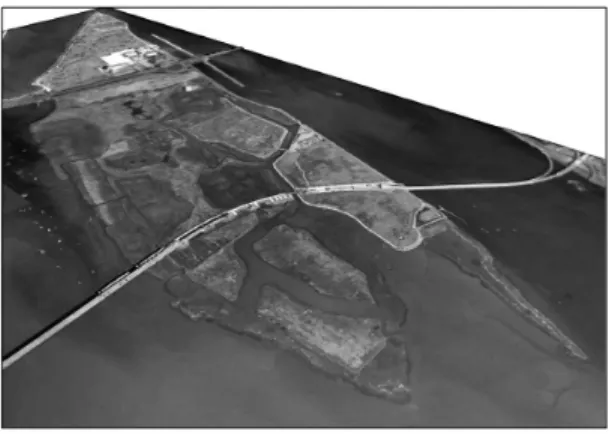
4.5 을숙도 지역 3차원 경관도 제작
을숙도 지역에 대하여 3차원 지형모델링 제작과 정사 보정 영상을 이용하여 그림 15와 같이 3차원 입체 경관 도를 제작하였다. 이러한 3차원 경관도를 바탕으로 관광 그림 13. 을숙도 지역 습지 구분도
표 6. 을숙도 지역 습지 비율 분석
구분 색상 면적(㎡㎡) 비율(%)
갈대 748,550 17
건물 234,319 5
녹지 825,318 18
도로 83,950 2
매립토사 422,554 9
세모고랭이 387,000 9
수로 860,985 19
해안 습지 925,430 21
합계 4,488,106 100
그림 14. 습지 구분도(횡단면도)
자원 관리, 정밀 생태조사, 침수 모델링, 지형 변화 모니 터링 등 그 활용분야가 넓을 것으로 판단된다.
5. 결 론
본 연구에서는 항공 LiDAR 자료를 이용하여 을숙도 지역에 대하여 도화 및 식생 분류를 수행하였고, 이를 통하여 을숙도 지역의 습지 분석을 한 결과 다음과 같은 결론을 얻을 수 있었다.
항공 LiDAR 자료를 이용하여 을숙도 지역에 대한 공 간정보를 취득하였으며, 이를 바탕으로 을숙도 지역에 대한 DEM과 DSM, 그리고 등고선(0.2m)을 제작하였다.
그리고 최소거리법을 적용하여 식생분류(감독분류)를 하였으며, 습지분류 정확도는 0.94로 나타났다. 이를 통하 여 총 8개의 토지 구분도로 분류하여 면적 및 비율을 정량 적으로 나타내었다. 습지 추출은 갈대, 세모고랭이, 해안 습지로 구분하여 나타내었으며 실험면적에 대하여 이들의 비율이 약 47%정도가 분포되어져 있음을 알 수 있었다.
을숙도 지역의 등고선 제작(0.2m)을 기반으로 횡단면 도를 제작 하였으며, 각 단면에 대한 습지 구분도를 나 타내었다.
본 연구를 기반으로 3차원 습지 구분도 제작에 대하여 다양한 기법을 제시하고 장기간 습지 모니터링을 수행 한다면 습지정보시스템의 중요한 자료로서 그 활용방안 이 클 것으로 기대된다.
감사의 글
이 논문은 2008년도 정부재원(교육인적자원부 학술연
구조성사업비)으로 한국학 술진흥재단의 지원을 받아 연구되었음(KRF-2008-314-D00432).
참고문헌
박수영, 윤성윤, 이기철, 김귀곤, 배덕효, 김형수 (2000), 습지학원론, 은혜기획, pp. 17-35.
윤성윤 (1999), 경상남도 내륙습지생태보전 방안, 경남 개발연구원, pp. 1-94.
이기철, 이원화, 윤해순, 남춘희, 김구연, 김승환, 서상 현 (2004), GIS와 RS를 이용한 생태지도 작성기법에 관한 기초연구, 한국지리정보학회 논문집, 한국지리 정보학회, 제 7권, 제 3호, pp. 57-69.
이기철, 임병선, 우창호, 양효식 (1996), 지리정보체계와 원격탐사에 의한 연한습지 목록 개발에 관하여, 한국 지형공간정보학회 논문집, 한국지형공간정보학회, 제 4권, 제 2호, pp. 149-159.
유목모, 토니쉥크 (2003), 현대 디지털사진측량학, 피어 슨에듀케이션코리아, pp. 93-144.
홍재상 (1999), 해양습지 생태계의 이해와 환경영향 평가, (사)한국습지보전연구회, 습지보전을 위한 환경영향 평가, pp. 3-48.
Barbara, J. K. and Joy, N. M. (2005), Wetland change analy- sis of San Dieguito lagoon, California, USA:1928-1994, Wetlands, The Society of Wetland Scientists, Vol. 25, No.
3, pp. 780-787.
National Wetlands Inventory(NWI). (2009), U.S. Fish &
Wildlife Service, http://www.fws.gov /wetlands.
Ramsar(2008), The 10th Meeting of the Conference of the Contracting Parties to the Convention on Wetlands, http://
www.ramsar2008.go.kr/main/index.jsp.
Rebecca, L. P., Ofer, B. and Edward, S. D. (2005), Remote wetland assessment for Missouri Coteau prairie glacial basins, Wetlands, The Society of Wetland Scientists, Vol.
25, No. 2, pp. 335-349.
United Nations Development Program (UNDP/
GEF). (2004), 환경부 국가습지보전사업관리단, http://www.koreawetland.org.
그림 15. 을숙도 지역 3차원 경관도
(접수일 2009. 09. 29, 심사일 2009. 10. 14, 심사완료일 2009. 12. 18)