DOI:10.5302/J.ICROS.2011.17.3.236 ISSN:1976-5622 eISSN:2233-4335
I. 서론
. (state space)
(sliding surface) ,
[1-3].
1 (linear combination) .
(exponentially stable) 0
,
. Zhihong
0
4], Park
[5].
[6,7].
.
, 0
1
( ) ,
0 1
. DC
motor .
* (Corresponding Author)
: 2010. 12. 19., : 2010. 12. 27., : 2010. 12. 30.
, , :
([email protected]/[email protected]/[email protected])
문제 정의 II.
(canonical form)
2 .
(1)
∈, ∈,
,
.
.
. (2)
, (signum
function) , .
(3) ,
[5-7].
. (3)
.
제어기 설계 III.
, ,
0 .
정리 1: ,
, 0
(relaxation time, ) .
(4)
증명: ≧ , (2) .
Design of Extended Terminal Sliding Mode Control Systems
, , *
(Young-Hun Jo1, Yong-Hwa Lee1, and Kang-Bak Park1)
1Korea University
Abstract: The terminal sliding mode control schemes have been studied a lot since they can guarantee that the state error gets to zero in a finite time. However, the conventional terminal sliding surfaces have been designed using power function whose exponent is a rational number between 0 and 1, and whose numerator and denominator should be odd integers. It is clearly restrictive. Thus, in this paper, we propose a novel terminal sliding surface using power function whose exponent can be a real number between 0 and 1.
Keywords: terminal sliding surface, SMC (Sliding Mode Control), nonlinear control
Copyright© ICROS 2011
. (5)
0 (relaxation time)
, .
⇔
⇔
⇔
(6)
, .
⇔
⇔
(7)
, (2) .
. (8)
(8) (6)~(7)
.
(9)
(7) (9) .
(10)
(10) ,
. .
정리 2: (1) ,
0 .
(11)
.
증명: .
. (12)
≧ , .
(13)
≧ , (2) .
⇔ . (14)
(14) (13) ,
.
(15)
.
(16)
(15) (16) (11)
.
(17)
(17) , 0
() .
≦
(18)
(18)
. (12) (positive
definite function) , (17) (negative definite function) ( )
( ) .
1
0 .
0 .
(singular point) .
.
(19)
실험 결과 IV.
DC
( , , ) . DSP
, 1msec. ,
, , .
, (3)
0 1
[5-7].
,
. ,
짝수
홀수 , 홀수
짝수 .
1~4 ,
. 1 ,
0 .
2
. ,
,
.
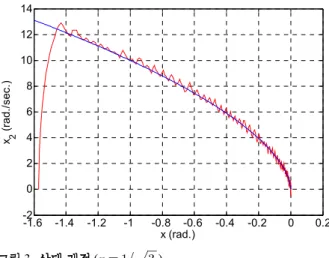
3 , 4
0 0.2 0.4 0.6 0.8 1
-1.6 -1.4 -1.2 -1 -0.8 -0.6 -0.4 -0.2 0 0.2
Time (sec.)
Output (rad.)
1. () ( ).
Fig. 1. The output () ( ).
0 0.2 0.4 0.6 0.8 1
-14 -12 -10 -8 -6 -4 -2 0 2
Time (sec.)
sliding variable ( s)
2. () ( ).
Fig. 2. The sliding variable () ( ).
-1.6 -1.4 -1.2 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 -2
0 2 4 6 8 10 12 14
x (rad.) x 2 (rad./sec.)
3. ( ).
Fig. 3. The phase portrait ( ).
0 0.2 0.4 0.6 0.8 1
-5 0 5 10 15 20 25
Time (sec.)
Input ( u)
4. () ( ).
Fig. 4. The input () ( ).
0 0.2 0.4 0.6 0.8 1
-1.6 -1.4 -1.2 -1 -0.8 -0.6 -0.4 -0.2 0 0.2
Time (sec.)
Output (rad.)
5. () ( ).
Fig. 5. The output () ( ).
.
5~6 짝수
홀수 ,
. 5 ,
, 0
. 6
.
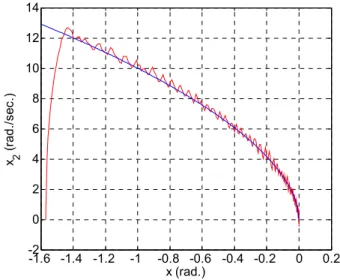
7~8 홀수
짝수 ,
. 7 ,
, 0
. 8
.
,
0 1
.
-1.6 -1.4 -1.2 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 -2
0 2 4 6 8 10 12 14
x (rad.) x 2 (rad./sec.)
8. () ( ).
Fig. 8. The output () ( ).
V. 결론
. ,
, 0 1
,
0 1 .
.
참고문헌
[1] V. I. Utkin, “Variable structure systems with sliding mode,” IEEE Trans. on Automatic Control, vol. 22, no.
2, pp. 212-222, Apr. 1977.
[2] J. Y. Hung, W. Gao, and J. C. Hung, “Variable struc- ture control: a survey,” IEEE Trans. on Industrial Electronics, vol. 40, no. 1, pp. 2-22, Feb. 1993.
[3] C. Edwards and S. K. Spurgeon, Sliding Mode Control, Taylor & Francis Ltd, 1998.
[4] M. Zhihong, A. P. Paplinski, and H. R. Wu, “A robust terminal sliding mode control scheme for rigid robotic manipulators,” IEEE Trans. on Automatic Control, vol.
39, no. 12, pp. 2464-2469, Dec. 1994.
[5] K. B. Park and J. J. Lee, “Comments on a robust termi- nal sliding mode control scheme for rigid robotic manip- ulators,” IEEE Trans. on Automatic Control, vol. 41, no.
5, pp. 761-762, May 1996.
[6] L. Wang, T. Chai, and L. Zhai, “Neural-network based terminal sliding-mode control of robotic manipulators in- cluding actuator dynamics,” IEEE Trans. on Industrial Electronics, vol. 56, no. 9, pp. 3296-3304, Sep. 2009.
[7] Y. Feng, J. Zheng, X. Yu, and N. V. Truong, “Hybrid terminal sliding-mode observer design method for a per- manent-magnet synchronous motor control system,” IEEE Trans. on Industrial Electronics, vol. 56, no. 9, pp.
3424-3431, Sep. 2009.
-1.6 -1.4 -1.2 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 -2
0 2 4 6 8 10 12 14
x (rad.) x 2 (rad./sec.)
6. ( ).
Fig. 6. The phase portrait ( ).
0 0.2 0.4 0.6 0.8 1
-1.6 -1.4 -1.2 -1 -0.8 -0.6 -0.4 -0.2 0 0.2
Time (sec.)
Output (rad.)
7. () ( ).
Fig. 7. The output () ( ).
2009 . 2009 ~
.
, .
1990 (
). 1992 (KAIST)
( ). 1997
. 1997 ~1999 2 . 1997 12 ~
1999 2 (KIT)
. 1999 3 ~ .
, , ,
.
2010 . 2010 ~
.
, .