大 韓 土 木 學 會 論 文 集 第26卷 第4D 號·2006年 7月 pp. 573~580
交 通 工 學
강우 및 밝기에 따른 신호교차로
포화차두시간 분석에의 적응 뉴로-퍼지 적용
Applying the ANFIS to the Analysis of Rain and Dark Effects on the Saturation Headways at Signalized Intersections
김경환*·정재환**·김대현***
Kim, Kyung Whan · Chung, Jae Whan · Kim, Daehyon
···
Abstract
The Saturation headway is a major parameter in estimating the intersection capacity and setting the signal timing. But Exist- ing algorithms are still far from being robust in dealing with factors related to the variation of saturation headways at sig- nalized intersections. So this study apply the fuzzy inference system using ANFIS. The ANFIS provides a method for the fuzzy modeling procedure to learn information about a data set, in order to compute the membership function parameters that best allow the associated fuzzy inference system to track the given input/output data. The climate conditions and the degree of brightness were chosen as the input variables when the rate of heavy vehicles is 10-25 %. These factors have the uncertain nature in quantification, which is the reason why these are chosen as the fuzzy variables. A neuro-fuzzy inference model to estimate saturation headways at signalized intersections was constructed in this study. Evaluating the model using the statistics of R
2, MAE and MSE, it was shown that the explainability of the model was very high, the values of the statistics being 0.993, 0.0289, 0.0173 respectively.
Keywords : ANFIS, neuro-fuzzy, saturation headway, fuzzy inference system
···
요 지
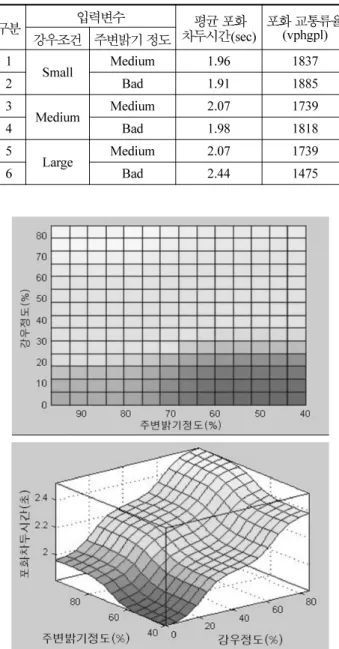
포화차두시간은 신호시간 설계와 교차로 용량추정에 있어서 중요한 변수 중에 하나이다. 그러나 현재의 기법은 신호교차로 에서 포화차두시간에 영향을 미치는 요인들 중 정성적인 요인들을 다루기에는 부적절하다. 본 연구에서는 퍼지적 성격을 가 진 정성적 인자인 강우조건과 주변 밝기정도를 선택하여 ANFIS를 이용해서 현장에서 관측된 관측치와 입ㆍ출력 데이터 집 합의 학습을 통해 퍼지근사추론 모형을 구축하였다. 강우조건은 강우량에 따라 3개의 퍼지변수로, 주변 밝기정도는 2개의 퍼 지변수로 구분하였다. 이렇게 구축된 모형의 예측력은 검증자료를 이용한 관측치와 추론치를 비교함으로써 평가되었다. 결정 계수와 오차 및 분산정도를 나타내는 척도인 평균절대 오차(MAE)와 평균제곱근 오차(MSE)가 각각 0.993, 0.0289, 0.00173으로 나타나 본 모형의 설명력이 높은 것으로 평가 된다.
핵심용어 : ANFIS, 뉴로-퍼지, 포화차두시간, 퍼지추론 시스템
···
1. 서 론
1.1 연구의 배경 및 목적
우리나라의 자동차 보유대수가 2005 년 12 월 기준으로
1500 만대에 이르고 국내 운전면허증 소지자가 2004 년 12 월
기준으로 2300 만 명에 이르러 본격적인 자동차시대에 접어
들게 되었다 . 이에따라 자동차 증가로 인한 교통문제는 오늘
날 우리사회의 심각한 문제가 되고 있다 . 이러한 문제를 해 결하기 위하여 도로시설의 확충 및 운영의 효율화가 필요하 나 교통시설 및 운영은 이를 따르지 못하고 있는 실정이다 .
그로 인해 곳곳에서 차량정체와 지체가 발생하고 있다 . 그 중에서 신호교차로에서의 교통 처리에 따른 문제가 매우 심 각하다 . 교차로에서의 교통신호는 각 방향별 교통 흐름의 일
부 또는 전부를 주기적으로 멈추게 하므로 교차로에 대기행 렬이 발생하게 된다 . 교차로에서의 교통운영 분석을 위해 많 은 영향변수들을 고려하는데 그 중에서 가장 중요한 변수로
작용하는 것이 교차로 내에서의 차두시간 (Time Headway) 이
다 . 특히 차두시간은 단속류 (Interrupted Traffic Flow) 에서 교통 시뮬레이션을 하는데 중요한 요소로서 작용한다 . 또한 교차로에서의 포화 차두시간은 교차로의 용량산정 , 서비스
*정회원·경상대학교도시공학과교수ㆍ환경및지역발전연구소고문ㆍ공학박사
(E-mail : [email protected])
**경상대학교도시공학과대학원도시공학전공석사과정
(E-mail : [email protected])
***정회원ㆍ전남대학교교통물류학부교통학전공조교수ㆍ공학박사