http://dx.doi.org/10.5302/J.ICROS.2011.17.12.1248 ISSN:1976-5622 eISSN:2233-4335
I.
서론Ottobock MyoHand, Utha ARM
(EMG) 3
.
100~150N ,
3
.
5
[1-12].
2007 TOUCH BIONIC I-Limb
5
shape-adaptation .
(EMG) 3
.
,
* (Corresponding Author)
: 2011. 7. 15., : 2011. 8. 6., : 2011. 10. 25.
, , , , :
([email protected]/[email protected]/[email protected]/shpark@
korec.re.kr/[email protected])
( : A110969) .
. 1
.
.
,
.
, 5
Development of a Multi-Function Myoelectric Prosthetic Hand with Communicative Hand Gestures
, , , * ,
(Yoon Heo1, Bum Ki Hong1, Eyong Pyo Hong1, Se Hoon Park1, and Mu Seong Moon1)
1
Korea Orthopedics & Rehabilitation Engineering Center
Abstract: In daily life, another major role of human hand is a communicative function using hand gestures besides grasp
function. Therefore, if amputees can express their intention by the prosthetic hand, they can much actively participate in social activities. Thus, this paper propose myoelectric multi-function prosthetic hand which can express 6 useful hand gestures such as Rock, Scissors, Paper, Indexing, Ok and Thumb-up. It was designed as under-actuated structure to minimize volume and weight of the prosthetic hand. Moreover, in order to effectively control various hand gestures by only two EMG sensors, we propose a control strategy that the signal type are expanded as “Strong” and “Light”, and hand gestures are hierarchically classified for the intuitive control. Finally, we prove the validity of the developed prosthetic hand with the experiment.Keywords: EMG (Electromyographic), prosthetic hand, differential mechanism, under-actuated mechanism
Copyright© ICROS 2011
1. .
Fig. 1. Hand gestures for emotion or intension expression.
. II ,
under-actuator III
. IV
2 EMG
,
. EMG strong light
2
.
.
의사표현 기능이 있는 전동의수
II.
body language
7-38-55 ( 7%, 38%,
55%) [15].
( , , ) 90%
.
. 2 ,
4 ( , , , ) 6
. ,
,
indexing, ok,
(thumb-up) 6 .
6
under-actuator .
, I-limb [1] bebionic hand [3]
, 4bar
.
10(5×2) 4
(linear actuator) .
(lateral-grasp)
[7].
1 .
기구부 설계
III.
손가락 구조 1.
Dechev TBM hand 6
,
[8].
. KOREC hand TBM hand
, 3 4
6
4 link .
,
.
2 .
인지 및 약지 모듈 구조 2.
,
. 5
(a) Rock (b) Scissors (c) Paper
(d) OK (e) Indexing (f) Thumb-up
2. 6 .
Fig. 2. 6 representative hand gestures.
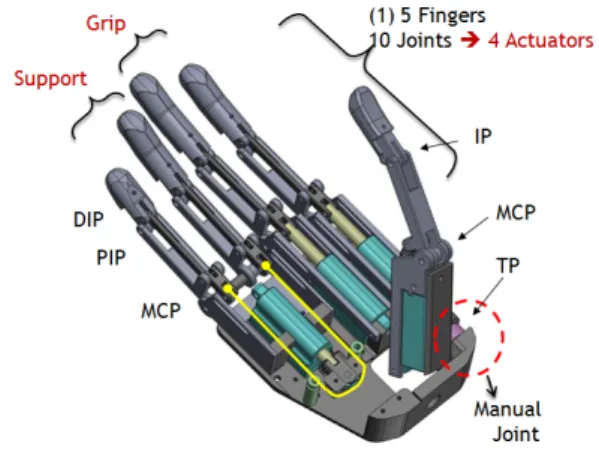
3. .
Fig. 3. Proposed multi-function prosthetic hand.
1. .
Table 1. Prosthetic hand spec.
/ 200mm / 83mm
11 (5×2 active, 1 passive) Power, Precision, Lateral
6
Actuator Firgelli PQ12S, 9N max
[16]
.
6 . 6(b)
MCP
6(c)
. 6(d)
.
4. , .
Fig. 4. Index & middle finger module.
2. .
Table 2. The finger joint size and motion ranges.
(mm) / (deg)
45/(0~90°) 26/(0~80°) 20/10°
45/(0~90°) 32/(0~80°) 20/10°
45/(0~90°) 26/(0~80°) 20/10°
45/(0~90°) 15/(0~80°) 16/10°
53/30° 45/(0~90°) 36/(0~54°)
5. .
Fig. 5. Ring & little finger module.
6. .
Fig. 6. The differential mechanism with Pulley.
제어시스템
IV.
,
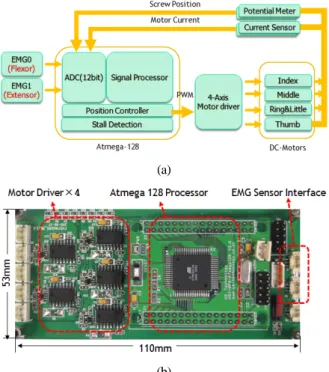
RISC Atmega128
. 7 EMG
2 ADC (Analog Digital Converters) , 4
DC ,
.
ADC EMG
PWM .
. 근전도 신호 분류
1. (EMG Signal Classification)
(a)
(b)
7. (a) , (b) .
Fig. 7. (a) The control system diagram, (b) The developed controller.
8. EMG .
Fig. 8. The position of EMG sensor attachment.
8 EMG (extensor digitorum) (flexor carpi ulnaris)
,
[1,2].
2 open close
.
,
EMG 3bit
language [13]
[14] .
EMG (visual feedback)
EMG
. EMG
, EMG
. , power grasp
strong EMG
, precision grasp
(hand gestures) light EMG
, .
, 9(a) , EMG
(e1)
level 70%
(tx) . 9(b) , EMG
(tx) t1 light EMG , t1
strong EMG .
strong EMG
light EMG 3 3
(extension, flexion, co-contraction) 5 .
제어전략
2. (Control Strategy) 2
3 6
, .
open close normal
,
. 상태
2.1 Normal
, ,
, .
normal .
normal
, ,
. 손동작의 계층적 분류 및 제어전략 2.2
.
, (rock) (paper)
(a) (b)
9. (a) EMG (b) EMG .
Fig. 9. (a) Measurement of EMG duration (b) Classification of EMG control command.
3. EMG .
Table 3. Classified EMG control commands.
Light Strong
Command Flexor Extn. Flexor Extn.
1 1 0 0 CC (Co-Contraction)
0 0 1 0 SF (Strong Flexion)
0 0 0 1 SE (Strong Extension)
1 0 0 0 LF (Light Extension)
0 1 0 0 LE (Light Flexion)
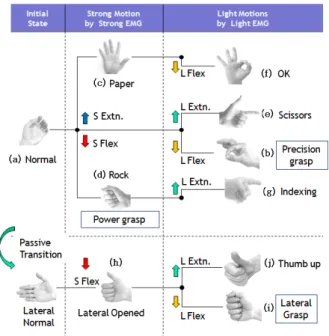
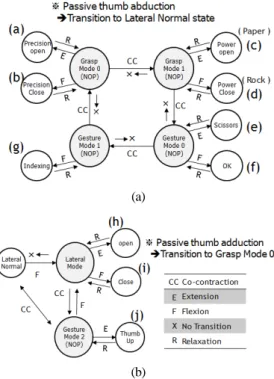
10. 3 6 .
Fig. 10. An hierarchical classification of 3 grasp functions and 6 hand gestures.
, indexing
. 3
6
, .
3 6
, 10
(strong motion) (light motion)
. strong
EMG light EMG
. , ok
strong motion light
motion .
normal (precision
grasp) open normal
. 11
12
(S1)
(S2) .
11
,
normal LF ,
LE (=normal)
.
(power grasp) ,
paper rock
light EMG , 10
. normal
CC
SE SF .
Lateral normal 10
normal
. lateral
opened (lateral grasp) thumb-up
, 4
(hook grasp) lateral normal
lateral opened .
lateral opened LE LF
(thumb-up) .
lateral normal
CC SE
normal .
제어전략의 성능 비교 3.
2 EMG
co-contraction [2] 3
6
. 13
(S1) (S2) .
11. Normal (S1).
Fig. 11. State diagram from the normal state (S1).
12. Lateral normal (S2).
Fig. 12. State diagram from the lateral normal state (S2).
(a)
(b)
13. S1(a) S2(b).
Fig. 13. Control strategy S1(a) and S2(b) by the mode change.
1 ,
, CC
. grasp 0
1 CC 0
3
CC .
4 .
13(a)-(j)
. precision open (a) (e)
, 3
, (j)
lateral
normal 4
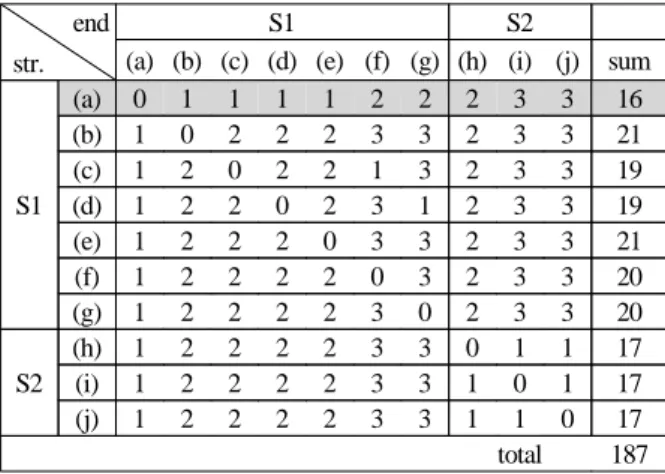
. , 5
,
.
4 5 ,
187 263
.
5 , normal [=precision opened,(a)]
, S2
. normal
.
실험 및 결과
V.
14 .
2 EMG (Ottobock
13E200/60hz) , atmega128
7.4v lithium ion .
EMG 255 65
45 strong light EMG
300ms .
EMG 300ms
light EMG strong EMG
.
4.
Table 4. Number of commands in the mode change method.
end str.
S1 S2
(a) (b) (c) (d) (e) (f) (g) (h) (i) (j) sum
S1
(a) 0 1 2 2 3 3 4 3 3 4 25
(b) 1 0 2 2 3 3 4 3 3 4 25
(c) 4 4 0 1 2 2 3 3 3 4 26
(d) 4 4 1 0 2 2 3 3 3 4 26
(e) 3 3 4 4 0 1 2 3 3 4 27
(f) 3 3 4 4 1 0 2 3 3 4 27
(g) 2 2 3 3 4 4 0 3 3 4 28
S2
(h) 2 2 3 3 4 4 5 0 1 2 26
(i) 2 2 3 3 4 4 5 1 0 2 26
(j) 2 2 3 3 4 4 5 2 2 0 27
total 263
5.
Table 5. Number of commands in the proposed control strategy.
end str.
S1 S2
(a) (b) (c) (d) (e) (f) (g) (h) (i) (j) sum
S1
(a) 0 1 1 1 1 2 2 2 3 3 16
(b) 1 0 2 2 2 3 3 2 3 3 21
(c) 1 2 0 2 2 1 3 2 3 3 19
(d) 1 2 2 0 2 3 1 2 3 3 19
(e) 1 2 2 2 0 3 3 2 3 3 21
(f) 1 2 2 2 2 0 3 2 3 3 20
(g) 1 2 2 2 2 3 0 2 3 3 20
S2
(h) 1 2 2 2 2 3 3 0 1 1 17
(i) 1 2 2 2 2 3 3 1 0 1 17
(j) 1 2 2 2 2 3 3 1 1 0 17
total 187
14. .
Fig. 14. Components of experimental equipments.
(a) Sphere object. (b) Cylindrical object. (c) Small object.
(d) Business card. (e) Hook grasp.
15.
Fig. 15. Grasp experiments.
15
. ,
power, precision, lateral .
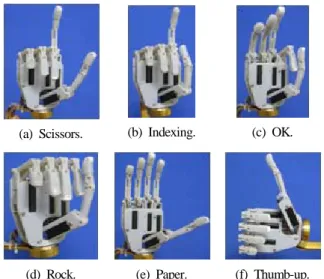
16 6
normal scissor, paper, ok, rock,
indexing thumb-up
. 17 EMG
.
VI.
결론 83 6
. 5
,
11 4
under-actuator .
EMG strong light
EMG
3 5 normal
3 6
. light strong EMG
300ms (signal delay)
.
.
.
.
. (a) Scissors. (b) Indexing. (c) OK.
(d) Rock. (e) Paper. (f) Thumb-up.
16. (KOREC hand) 6 .
Fig. 16. 6 hand gestures by the prosthetic hand (KOREC hand).
17. , Scissors(1), Paper(2), Rock(3), Ok(4), Indexing(5), Thumb-up(6).
Fig. 17. Hand gesture experiments, Scissors(1), Paper(2), Rock(3), Ok(4), Indexing(5), Thumb-up(6).
, .
참고문헌 [1] http://www.touchbionics.com.
[2] http://www.ottobock.com.
[3] http://www.bebionic.com.
[4] J. U. Chu, D. H. Jung, and Y. J. Lee, “Design and con- trol of a multifunction myoelectric hand with new adap- tive grasping and self-locking mechanisms,” International
Conf. on Robotics and Automation, Pasadena, California,
pp. 743-748, May 2008.[5] S. Y. Jung, and I. H, Moon, “Analysis of Grip force for tendon-driven prosthetic hand,” Proc. of Korean Society
of Precision Engineering Conference, pp. 871-872, Jun.
2008.
[6] S. I Ahn, Y. H. Oh, and S. J. Kwon, “Design of a hu- manoid robot hand by mimicking human hand's motion and appearance,”
Journal of Institute of Control, Robotics and Systems (in Korean), vol. 14, no. 1, pp.
62-69, Jan. 2008.
[7] C. M. Light and P. H. Chappell, “Development of a lightweight and adaptable multiple-axis hand prosthesis,”
Medical Engineering & Physics, vol. 22, pp. 679-684,
2000.[8] N. Dechev, W. L. Cleghorn, and S. Naumann, “Multiple finger, passive adaptive grasp prosthetic hand,”
Mechanism Mach Theory, vol. 36, pp. 1157-1173, 2001.
[9] P. J. Kyberd O. E. Holland, P. H. Chappell, S. Smith, R. Tregidgo, R. J. Bagwell, and M. Snaith, “MARCUS:
a two degree of freedom hand prosthesis with hier- archical grip control,” IEEE Trans. of Rehab. Eng., vol.
3, no. 1, pp. 70-76, 1995.
[10] B. J. Choi, S. H. Lee, S. C. Kang, and H. R. Choi,
“Development of anthropomorphic robot hand with tactile sensor: SKKU hand II,” Journal of Control, Automation,
and Systems Engineering (in Korean), vol. 12, no. 6, pp.
831-838, Aug. 2006.
[11] D. H. Jeong, J. U. Chu, and Y. J. Lee, “Development of myoelectric hand with infrared LED-based tactile sensor,”
Journal of Institute of Control, Robotics and Systems (in Korean), vol. 15, no. 8, pp. 831-838, Aug. 2009.
[12] S. H. Park, B. K. Hong, J. K. Kim, E. P. Hong, and M.
S. Mun, “Development of the myoelectric hand with a 2DOF auto wrist module,” Journal
of Institute of Control, Robotics and Systems (in Korean), vol. 17, no.
8, pp. 824-832, Aug. 2011.
[13] J. L. Pons, R. Ceres, E. Rocon, S. Levin, I. Markovitz, B. Saro, D. Reynaerts, W. Van Moorleghem, and L.
Bueno, “Virtual reality training and EMG control of the
MANUS hand prosthesis,” Robotica, vol. 23, pp. 311- 317, 2005.
[14] C. Cipriani, F. Zaccone, S. Micera, and M. C. Carrozza,
“On the shared control of an EMG controlled prosthetic hand: analysis of user-prosthesis interaction,”
IEEE Transactions on Robotics, vol. 24, no. 1, pp. 170-184,
Feb. 2008.[15] http://en.wikipedia.org/wiki/Albert_Mehrabian.
[16] D. T. Pham and W. B. Heginbotham, Robot Grippers:
International Trends in Manufacturing Technology, IFS
Ltd, UK, 1986.허 윤
2003 ( ).
2003
. 2008 . 2009 ~
.
, .
홍 범 기
2003 (
).
. , ․
.
홍 응 표
1990 (
). 2007
( ).
.
, .
박 세 훈
1998 (
). 2006 .
, ,
.
문 무 성
1978 (
). 1982 . 1992
Universityof Minnesota ( ). 1981 1985
. 1993 1994 . 1994
. .