서론 I.
, ,
.
,
.
, ,
. ,
GPS INS ,
. ,
. [1]
.
,
* (Corresponding Author)
: 2008. 9. 30., : 2008. 10. 30.
, , , , , :
([email protected]/[email protected]/[email protected]/whtjsdud1 [email protected]/[email protected]/[email protected])
2008 ( )
(KRF-2007-331- D00086)
. ,
/ .
. , .
. 0
,
. 3 , 3
[2].
3 .
,
.
SeaScan ,
[3]. SeaScan
.
. 3
,
. 1
, .
Vision Based Estimation of 3-D Position of Target for Target Following Guidance/Control of UAV
,
*, , , ,
(Jong-Hun Kim, Dae-Woo Lee, Kyeum-Rae Cho, Seon-Yeong Jo, Jung-Ho Kim, and Dong-In Han)
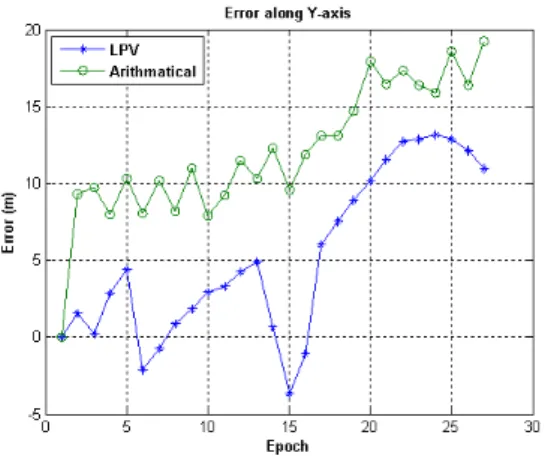
Abstract : This paper describes methods to estimate 3-D position of target with respect to reference frame through monocular image from unmanned aerial vehicle (UAV). 3-D position of target is used as information for surveillance, recognition and attack. In this paper. 3-D position of target is estimated to make guidance and control law, which can follow target, user interested. It is necessary that position of target is measured in image to solve 3-D position of target. In this paper, kalman filter is used to track and output position of target in image. Estimation of target's 3-D position is possible using result of image tracking and information of UAV and camera. To estimate this, two algorithms are used. One is methode from arithmetic derivation of dynamics between UAV, carmer, and target. The other is LPV (Linear Parametric Varying). These methods have been run on simualtion, and compared in this paper.
Keywords : estimation of 3-D position, monocular vision, kalman filter, LPV (Linear Parametric Varying)
.
,
.
. , ,
[4].
,
. [5],
. 3
.
3 , LPV
. LPV(Linear Parametric Varying)
,
. ,
, , .
LPV 3
,
.
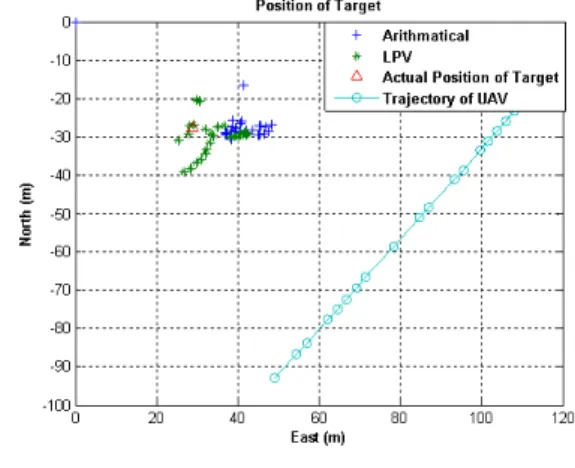
, LPV
. ,
,
.
.
, II
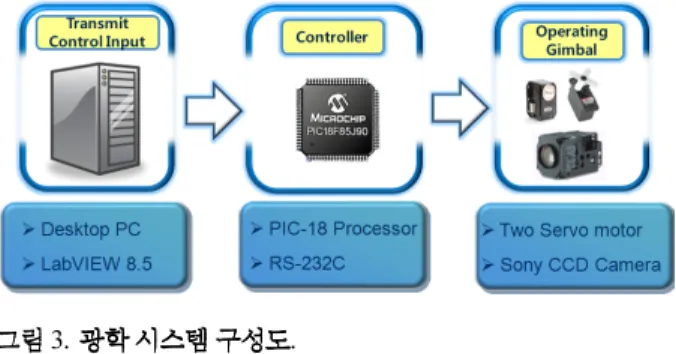
시스템 구성 및 영상 추적 II.
하드웨어 구성 1.
3 ,
. LabVIEW .
.
.
(FCC), .
, ,
. 2 .
,
, .
FCC
LabVIEW ,
, .
,
. LabVIEW
.
.
3 ,
. 3
. , 1. Seascan .
Fig. 1. Seascan System.
2. .
Fig. 2. Description of UAV experiment.
. RF .
. 좌표계 구성 2.
3
LPV 4
.
3 , ,
.
,
(1) .
(1) ,
,
.
2 , .
(1)
, (2) .
(2) ,
,
. (1), (2)
,
5 .
,
3 (3), (4) [6].
(3)
(4)
, , , , , 3
. 3
,
3 .
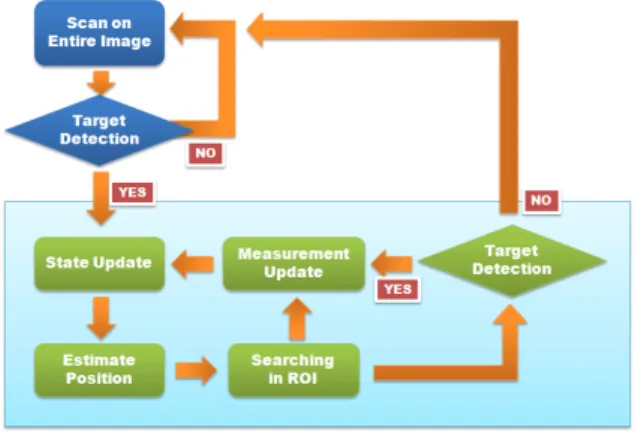
칼만 필터를 이용한 영상 추적 3.
.
.
.
.
.
RGB (Red, Green, Blue) .
RGB .
, .
,
. 2
,
- .
.
, (5), (6) .
(5)
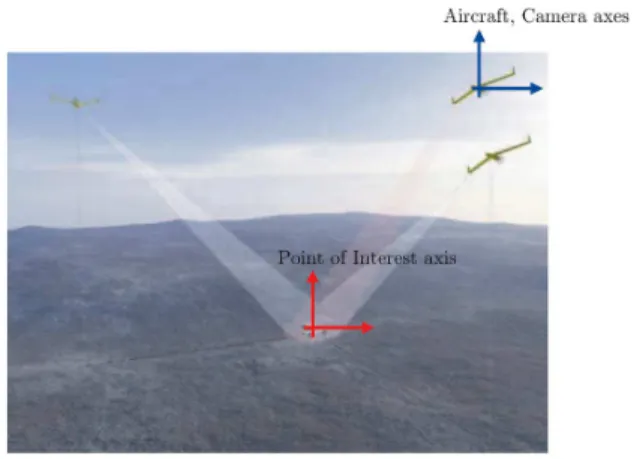
3. .
Fig. 3. Description of optical system.
4. 3 .
Fig. 4. 3-D coordinate system.
5. .
Fig. 5. Camera coordinate system.
(6)
( ∆) ∆
. (6)
, [ , ], .
.
,
. 6
,
7 .
차원 위치 측정을 위한 기하학적 유도 III. 3
II 2 3
.
, .
,
.
가정 1.
.
가정 2. ,
.
가정 3. ,
.
3
.
, (7) .
(7)
3 ,
(8) .
(8)
,
,
.
1 0 ,
3
.
,
(9) .
∥ ∥
(9)
IV. LINEAR PARAMETRIC VARYING 3
.
, 3 .
. 3
,
. ,
, ,
LPV 3
. LPV (10)
, .
(10)
6. .
Fig. 6. Sequence of Kalman Filter.
7. .
Fig. 7. Result of target tracking using kalman filter.
LPV 3 ,
(11) .
(11)
,
, ,
,
.
(12) ,
(13) .
(12)
(13)