잠수함의 제어판 재밍에 대한 안전운항영역 설정
박종용1․ 김낙완2,†․ 신용구3 서울대학교 공학연구원1
서울대학교 해양시스템공학연구소2 국방과학연구소 제6기술연구본부3
A Study on the Safety Operational Envelope of a Submarine in Jamming
Jong-Yong Park1․ Nakwan Kim2,†․ Yong-Ku Shin3 Institute of Engineering Research, Seoul National University1
Research Institute of Marine Systems Engineering, Seoul National University2 Agency for Defense Development3
This is an Open-Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License(http://creativecommons.org/licenses/by-nc/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
Safety operational envelope (SOE) is the area which guarantees the safety of a submarine from the accident such as jamming and flooding. The maximum safe depth is set to prevent the damage to the hull from increasing water pressure with depth. A minimum safety depth is set to prevent a submarine from the exposure above the free surface and collision against surface ship.
The prediction method for the SOE in the design phase is needed to operate the submarine safely. In this paper, the modeling and calculation methods of the SOE are introduced. Main ballast tank blowing modeling and propeller force modeling are conducted to simulate the accidents and the recovery process. The SOEs are established based on the crash stop and emergency rising maneuver simulation. From the simulation results, it can be known that the emergency rising maneuver is more effective recovery action than the crash stop.
Keywords : Safety operational envelope(SOE, 안전운항영역), Emergency rising maneuver(긴급부상), Crash stop(긴급정지), Main ballast tank blowing(주부력탱크 블로잉)
1. 서 론
잠수함이 실용화되고 대형화 된 이후 전시 공격에 의한 침몰 을 제외하고 평시에만 약 170여 척의 잠수함이 선체재질불량, 해 상충돌, 장비 오작동, 화재, 폭발 등의 이유로 침몰하였다. 잠수 함의 안전사고는 인명피해는 물론 해양오염을 야기한다. 특히 원 자력을 추진동력으로 사용하는 잠수함의 경우 방사능 물질의 유 출로 연결될 수 있는 심각한 문제점을 안고 있다. 잠수함이 최대 잠항심도 근처에서 운항하는 경우 해수 침수나 제어판의 오작동, 즉 재밍(jamming)으로 인해 심도 유지에 실패하여 위험에 처할 수 있다. 스노클(snorkel) 심도 부근 수면 근처에서 운항하는 경 우 파도와 조류와 같은 환경하중이나 제어판 재밍으로 인해 수면 으로 부상하게 되어, 적에게 탐지되거나 수상선과 충돌할 위험성 이 커진다. 과도한 종동요각은 추진계통 등에 예기치 못한 손상 을 입혀 사고를 일으킬 가능성이 있다 (Park, et al., 2016). 이러
한 안전사고의 위험성을 줄이기 위하여 잠수함은 안전운항영역 (Safety Operational Envelope, SOE or Manoeuvring Limitations Diagrams, MLD)을 설정해야 한다. 안전운항영역이란 사고 발생 시 심도 복구에 필요한 이탈심도(excursion depth)를 속도별로 정의하여 도출한 영역이다 (Society of Naval Architects of Korea, 2012). 안전운항영역은 수면 근처에서 운항할 경우 수면 위로의 브로칭(broaching)을 피하고, 깊은 심도에서 운항할 경우 최대 잠항심도 이상으로 이탈하지 않고 안전하게 부상할 수 있도 록 설정한다. 잠수함을 안전하게 운용하기 위하여 설계 초기단계 에서 잠수함의 조종성능을 추정하고 안전운항영역을 도출하여 운용가능범위를 예측하는 방법이 요구된다.
잠수함의 조종운동에 대한 수학함수모형을 제안한 연구는
Gertler and Hagen (1967), Feldman (1979), Watt (2007)가 대
표적이다. Gertler and Hagen (1967)은 잠수함에 작용하는 유체
력을 운동변수와 제어변수의 다항식 모형으로 표현하였다.
Feldman (1979)는 Gertler and Hagen (1967) 모형에 횡교차항 력(crossflow drag) 및 세일보텍스(sail vortex)를 추가하여 잠수 함의 비정상상태 및 비선형 운동특성을 보다 정확하게 표현하였 다. Watt (2007)는 수평면 및 수직면에 국한되지 않은 유체 입사 각도를 정의하여 큰 받음각 및 연성운동에 적합한 식을 제안하였 다. 위와 같은 조종운동모형 내의 유체력 미계수를 추정하기 위 한 연구는 주로 구속모형시험을 통하여 수행되었다. 구속모형시 험 방법은 대표적으로 평면운동장치(Planar Motion Mechanism, PMM) 시험, 회전팔(Rotating Arm, RA) 시험, 원추형시험 (Coning Motion Test, ConMT) 등이 있다. 평면운동장치 시험은 모형을 강제동요 시키는 방향에 따라 수평면운동장치(Horizontal Planar Motion Mechanism, HPMM) 시험 및 수직면운동장치 (Vertical Planar Motion Mechanism, VPMM) 시험으로 나눌 수 있다. Jung, et al. (2014), Jeong, et al. (2016)은 부산대학교 예인수조에서 VPMM을 이용하여 수중운동체의 수직면 유체력 미 계수를 추정한 바 있다. Kim, et al. (2012)은 한국해양과학기술 원 부설 선박해양플랜트연구소에서 Computerized Planar Motion Carriage(CPMC)와 몰수체용 구속모형시험장치를 이용하여 몰수 체의 수평면 및 수직면 유체력 미계수를 추정하였다. Rhee, et al. (2000), Park, et al. (2015)은 서울대학교 예인수조에서 HPMM을 이용하여 수평면 유체력 미계수를 구하고, 모형을 횡방 향으로 90° 회전시켜 고정시킨 후 VPMM 시험을 수행하여 수직 면 유체력 미계수도 도출하였다. Seol, et al. (2005)은 여러 심 도별로 HPMM시험을 수행하여 자유수면과 몰수체와의 거리가 몰수체의 조종운동에 미치는 영향을 파악하고자 하였다. 원추형 시험은 수중에서 여러 가지 원추각과 회전수로 원추형 운동을 강 제로 부여한 후 정상예인상태에서 모형에 가해지는 힘과 모멘트 를 계측하는 시험으로, Davidson Laboratory의 Lewandowski (1991)가 항공기의 유체력 미계수를 추정하기 위해 사용되던 원 추형시험 장비를 잠수함 수조모형시험에 최초로 적용하였다 (Park, et al., 2015). 후에 Rhee, et al. (2000), Park, et al.
(2015)이 원추형 시험 장비를 이용하여 횡동요 관련 유체력 미계 수를 도출한 바 있다. 수조모형시험 뿐 아니라, 풍동시험을 통해 동유체력을 계측하거나 잠수함 주위 유동을 관찰하여 유체역학적 인 특성을 파악하는 등의 연구도 활발히 수행되고 있다 (Nguyen, et al., 1995; Quick, et al., 2012; 2014; Park, 2016).
안전운항영역은 제어판의 오작동 상황을 가정하여 산출할 수 있다. 오작동으로 인하여 상승하는 경우나 하강하는 경우에 따라 대응 방법을 달리할 수 있다. 상승하는 경우에는 추진기 역회전 을 이용한 긴급정지(crash stop), 하강하는 경우에는 긴급부상으 로 사고상황에 대응할 수 있다. Lee (2004)는 선수 수평타(bow plane or sail plane)의 오작동 상황을 가정하고 제어 가능한 선 미 수평타(stern plane)를 이용한 대응으로 안전운항영역을 도출 하였으나, 선수 수평타는 선미 수평타보다 크기가 작아 타효가 작기 때문에 반대의 고장상황, 즉 선미 제어판의 고장상황을 가 정하면 선수 제어판으로는 상승 또는 하강 상황으로부터의 복구 는 불가능해진다. Watt (2007)는 모형시험을 통해 도출된 유체력
미계수를 이용하여, Bettle (2009)는 전산유체역학(Computational Fluid Dynamics, CFD)을 이용하여 긴급부상 시뮬레이션을 수행 하였다. 두 연구 모두 부력탱크(Main Ballast Tank, MBT) 블로잉 (blowing)을 이용한 긴급부상 시뮬레이션을 수행하였으나 선수/
선미 수평타의 오작동 상황은 고려하지 않았고, 추진기의 역회전 상황에 대한 모델링도 수행되지 않았기 때문에 긴급정지에 대한 시뮬레이션은 수행되지 않았다.
본 연구는 추진기가 정회전 하는 일반적인 상황뿐 아니라 전 진 중 역회전(crashback)상황에 대해서도 모델링을 수행하였고, 주 부력탱크 블로잉에 대한 모델링을 수행하였다. 조종운동방정 식 내 유체력 미계수는 저항시험, 사항시험, 평면운동장치시험, 원추형시험 및 제어판 시험을 통하여 도출한 유체력 미계수를 사 용하였다. 선미제어판의 오작동으로 인하여 상승하는 경우는 긴 급정지로, 하강하는 경우는 긴급부상으로 대응하도록 시뮬레이션 하여, 실제 상황에 근접한 방식으로 안전운항영역을 산출하였다.
2. 조종운동방정식
2.1 좌표계
잠수함의 6자유도 운동을 기술하는 좌표계는 지구고정좌표계
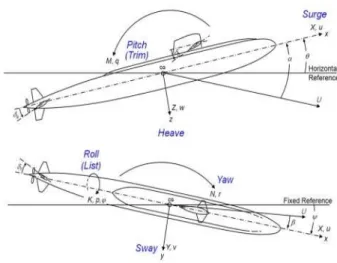
와 물체고정좌표계 로 구성된다. 본 논문에 서는 잠수함의 원통 중심선과 길이방향의 무게중심에서의 횡단 면이 만나는 점을 물체고정좌표계의 원점으로 선정하였다. 긴급 부상 중에는 주 부력탱크 블로잉으로 인해 무게중심이 변하지만, 물체고정좌표계의 원점은 고정시켰다. Fig. 1은 잠수함의 측면에 서 본 평면상의 좌표계 및 위에서 본 평면상의 좌표계를 보여준다.
Fig. 1 Coordinate system
여기서, 는 잠수함의 속도를 의미한다. 는 각각 잠수함
의 전후동요(surge), 좌우동요(sway), 상하동요(heave) 속도를
의미한다. 는 각각 잠수함의 횡동요(roll), 종동요(pitch), 선수동요(yaw) 오일러각(Euler angle)을, , 는 각각 받음각 (angle of attack)과 편류각(drift angle)을 의미한다.
2.2 6자유도 운동방정식
잠수함의 6자유도 운동방정식은 식 (1)과 같다.
(1)
여기서, 은 잠수함의 질량을,
는 각각 하첨자 축들에 대한 관성모멘트를,
는 물체고정 좌표계에 대하여 기술된 잠수함의 무게중심을 의미한다. 파랑과 조류와 같은 환경하중이 작용하지 않는다고 가정하면, 잠수함에 작용하는 외력은 식 (2)와 같이 표현할 수 있다.
(2)
여기서, 하첨자 H, HS, prop, C는 각각 잠수함에 작용하는 동유 체력, 중력과 부력, 추진력 및 제어력을 의미한다. 이러한 외력을 표현하는 방법은 대표적으로 Gertler and Hagen (1967) 모형 및 Feldman(1979) 모형이 있다. Shin and Lee (2005)에 따르면, Gertler and Hagen (1967) 모형은 다른 모형에 비하여 수식이 단순하고, 받음각 18°이하의 조종운동에서 타당한 결과를 주는 장점이 있다. 본 논문에서는 잠수함에 작용하는 외력을 표현하기 위하여 Gertler and Hagen (1967) 모형을 사용하였다. 조종운동 방정식 모형구조에 대한 상세한 설명은 Gertler and Hagen (1967)을 참조하길 바란다.
2.3 주 부력탱크
본 절에서는 긴급부상을 위한 주 부력탱크 블로잉 중 발생하 는 질량, 무게중심, 관성모멘트의 변화에 대한 모델링을 다룬다.
주 부력탱크에서 배출된 물로 인한 잠수함의 무게의 변화는 식 (3)과 같이 표현할 수 있다.
(3)
여기서, 는 각각 잠수함의 무게와 부력을 나타낸다. 부력은 잠수함의 외형이 변하지 않는 한 일정하다. 아래첨자 ‘0’는 배출 이 시작되기 전의 상태를 의미한다. 잠수함 부력 대비 배출된 물 의 비(blown mass fraction)를 의미하는
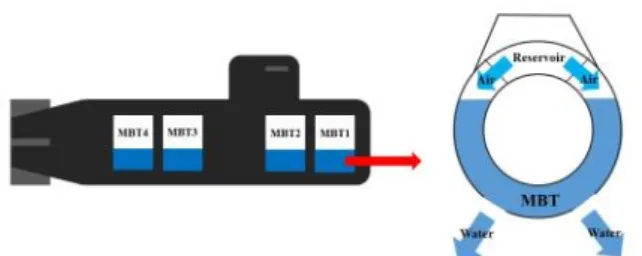
는 배출이 시작되기 전에는 0이며, 일반적으로 주 부력탱크가 모두 비워졌을 때 약 0.1이다. 잠수함은 선체의 길이방향에 따라 여러 개의 부력탱크 가 설치되어 있고, 각각의 부력탱크는 동시 혹은 독립적으로 물 의 배출이 가능하다. 물의 배출 방식은 크게 가스발생기(gas generator)를 이용한 방법과 고압공기를 이용한 방식으로 구분할 수 있다. 가스발생기를 이용한 긴급부상 장치는 hydrazine이나 inert gas를 이용한 장치로 짧은 시간 안에 부력탱크의 물을 비울 수 있기 때문에 긴급한 상황에서의 초기대응이 빠르다. 하지만 장비가 고가여서 상시 시험이 어렵고, 도중에 작동을 중지할 수 없다는 단점이 있다. 고압공기 시스템은 긴급 부상용 압축공기 저장소(reservoir)에 들어있는 다량의 고압(약 250bar)의 압축공 기를 이용하여 공기를 부력탱크로 밀어내어 해수를 배출시키는 시스템이다. 이 시스템은 언제든지 작동을 중지할 수 있다는 장 점을 지니며 대부분의 잠수함에서 채택하고 있다. 본 논문은 대 상 잠수함이 긴급부상 시스템으로 고압공기 시스템을 장착하고 있다고 가정하였다. 부력탱크에서 평형수를 배출시키는 방식에 대한 개념도를 Fig. 2에 도시하였다.
Fig. 2 Conceptual figure of the main ballast tank blowing
평형수의 배출로 긴급부상을 할 때 선수가 선미보다 빨리 들 어올려져야 하기 때문에 선수 쪽 탱크가 가장 크게 설계되며 평 형수 배출도 가장 먼저 이루어진다. 각각의 탱크의 도심 (centroid)은 선체중앙선(hull centerline)에 위치되어 있다고 가정 한다. 긴급부상이 시작되면 선수 쪽 부력탱크의 부피가 가장 크 기 때문에 배출된 평형수 배출로 인한 빈 공간의 도심
은 선수 쪽으로 이동하게 된다. 부력탱크의 개수를 N, 부력탱크들의 부피의 합을
라 정의하면
는 식
(4)와 같이 표현할 수 있다.
(4)
여기서,
는 부력탱크 내부의 공기의 부피, 즉 배출된 물의 부
피를 의미한다.
는 i번째 탱크의 공기의 부피를 의미한다. 물
의 배출이 시작되기 전
는 0이고,
의 최대값은 부력탱크 내부의 모든 물이 배출되었을 때의 부피이므로
와 같다. i번 째 탱크 도심의 전후방향 위치를
라 정의하면, 배출된 물로 인한 빈 공간의 선체 길이방향 도심
는 식 (5)와 같이 표현할 수 있다.
(5)
i번째 탱크 내부 빈 공간의 수직방향 도심
는 부력탱크가 선체중앙에 상하대칭으로 설치되어 있다면, 물의 배출이 시작되 기 전에는 선체 상부에 위치해 있고 물의 배출이 끝나면 선체중 앙선에 위치하게 된다.
의 초기값은 선체 최대반지름의 90%
로 가정, 즉 압력선체의 반지름이 선체 반지름의 90%라 가정하 면
는 식 (6)과 같이 표현할 수 있다.
(6)
잠수함의 무게중심
를
를 이용하여 표현하면 식 (7)과 같다.
(7)
는 각각 물체고정좌표계에 대하여 기술된 잠수함의 부력중심을 의미한다. 물의 배출로 인한 관성모멘트의 변화는 식 (8)과 같이 구할 수 있다.
(8)
는 배출이 시작되기 전 잠수함의 질량을 의미한다. 식 (7) 과 (8)에 표현된 잠수함의 무게중심 및 관성모멘트의 변화는 부 력탱크 내부 공기의 부피인
의 변화를 알아야 구할 수 있다.
는 시간, 탱크의 위치, 잠수함의 심도 및 종동요각의 함수이 다. Mackay (1992)는 긴급부상을 시작한 후 압축공기 저장소 내 부의 공기밀도
을 식 (9)와 같은 지수함수로 가정했다.
(9)
여기서,
는 부력탱크 노즐의 직경 및 특성에 따라 변하는 블 로잉 상수이고,
는 부력탱크에서 물의 배출이 시작되는 시간을 의미한다. 부력탱크 내부 공기의 총 질량은 압축공기 저장소로부 터 배출된 공기질량과 같으므로 식 (9)로부터 식 (10)을 도출할 수 있다.
(10)
압축공기 저장소의 공기배출 시스템(air delivery system)은 식 (11)과 같이 부력탱크 크기에 비례한 질량만큼 공기를 전달할 수 있다고 가정한다.
(11)
i번째 탱크 내부의 공기압은 식 (12)와 같다.
(12)
여기서,
는 대기압,
는 i번째 부력탱크 내부수면이 위치한 심도,
는 i번째 부력탱크 내부 공기의 밀도, 은 공기의 기체 상수, 는 부력탱크 내부의 온도를 의미한다. 식 (12)는 부력탱 크 바닥이 열리고 물이 배출되면서 발생하는 압력의 손실은 없다 고 가정하여 작성된 식이다. 식 (9) ~ 식 (12)를 조합하면 각각 의 부력탱크 내부 공기의 부피를 식 (13)과 같이 계산할 수 있다.
(13)
선체의 종동요각 를 고려하면, 각각 부력탱크의
는 식 (14)와 같이 표현할 수 있다.
sin
(14)
여기서 는 잠수함 선체의 직경을 의미한다. 식 (14)를 식 (13)
에 대입하면 i번째 부력탱크의 전체부피 대비 배출된 물의부피
비인
를 식 (15)로 정리할 수 있다.
(15)
sin
cos
주 부력탱크 블로잉 시뮬레이션을 수행하기 위해 결정해야 하 는 변수를 정리하면 압축공기의 질량, 블로잉 상수, 공기의 기체 상수, 부력탱크 내부의 온도, 주 부력탱크의 전후방향 위치 및 부피이다. 압축공기 질량 및 주 부력탱크의 부피는 Watt (2007) 의 연구에 사용된 대상 잠수함과 본 연구에서 사용한 대상 잠수 함간 배수량에 비례한다고 가정하였고, 주 부력탱크의 전후방향 위치는 길이에 비례한다고 가정하여 결정하였다. 나머지 변수는 Watt (2007)가 사용한 값과 동일한 값을 사용하였다. 결정된 변 수 값은 Table 1에 정리하였다.
Table 1 Parameters of the MBTs blowing model
Item Value
Total air mass m
r03314kg
Blowing constant C
2-0.06
Axial centroid of
MBTs x
T1, x
T2, x
T3, x
T430.1m, 26.0m, -39.7m, -43.8m Volume of MBTs V
T1, V
T2, V
T3, V
T4165.7m
3, 99.4m
3,
99.4m
3, 49.7m
32.4 추력함수
추진기가 전후방향 운동에 미치는 영향은 추진기의 축방향 힘
와 선체 저항
′
의 차이를 의미하는 추력함 수
로 표현한다. 본 논문에서는 추력함수를 속도비(velocity ratio) 로 표현한 Shin (2007)의 연구를 참고하였다. 속도비는 식 (16)과 같이 정의한다.
(16)
여기서
는 주어진 추진기 회전수
로 도달할 수 있는 예상속 도이며 식 (17)과 같이 표현할 수 있다.
(17)
여기서,
는 추진기와 잠수함의 특성에 따른 상수이며 본 논문 에서는 Watt(2007)가 사용한 값인 3.914를 사용하였다. 잠수함 의 속도를 변화시키는 경우, 목표 속도에 상응하는 추진기의 회 전수를 식 (17)에 표현된 속도와 추진기 회전수간의 관계식을 이
용하여 구한다. 목표 속도에 상응하는 추진기의 회전수, 즉 명령 회전수를 본 논문에서
로 정의하였다. 추진기에 어떠한 명령 회전수
가 입력되어도, 추진기의 관성으로 인해 회전수가 즉 각 명령 회전수에 도달할 수 없고 고유의 동역학에 따라 회전수 가 변화하게 된다. 본 연구에서는, 식 (18)과 같은 2차 동역학으 로 추진기의 회전수가 변한다고 가정하였다.
(18)
추진기 동역학의 고유주파수
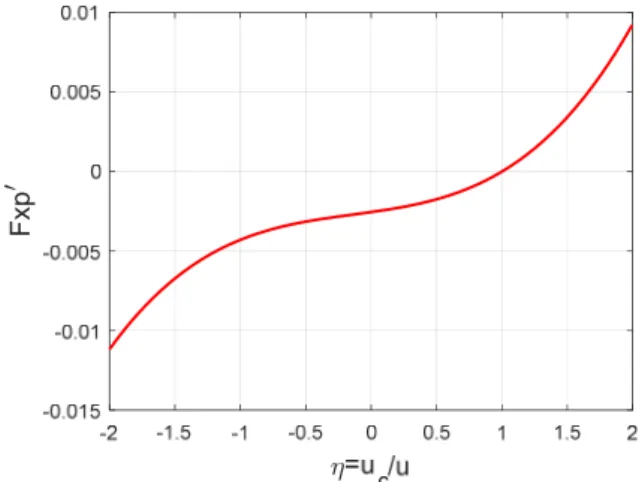
과 감쇠계수 는 각각 Watt (2007)가 사용한 값인 0.1과 0.7이 적용되었다. 속도를 변화시키 기 위해 어떠한 명령 회전수가 결정되면 추진기의 회전수가 식 (18)에 표현된 동역학에 따라서 변화하고, 결과적으로 속도비가 변하게 된다. 본 논문에서는 실적함들의 추력데이터를 이용하여 추력함수를 속도비의 함수로 제시한 Shin (2007)의 연구결과를 적용하였다. Fig. 3은
으로 무차원화 된 추력함수를 보여준다.
Fxp
Fig. 3 Propulsion function
Fig. 3을 보면 속도비가 1인 경우, 즉 현재 추진기의 회전수에 상응하는 예상속도가 잠수함의 현재속도와 같은 경우 추력함수 값은 0이므로, 잠수함은 현재 속도를 유지한다. 속도를 높이기 위해 추진기 회전수를 높이면, 속도비가 1보다 크게 되어 추력함 수 값이 양수가 된다. 추력함수 값이 양수이면 잠수함에 부가적 인 추력이 발생하여 목표 속도에 도달할 때까지 속도는 증가하고 속도비가 1이 되면 속도는 유지된다.
2.5 유체력 미계수 도출
조종운동방정식 내의 유체력 미계수는 수조모형시험과 풍동모
형시험을 통하여 도출되었다. 두 시험 모두 스팅(sting) 타입의 6
분력계가 사용되었다. 예인수조에서는 저항시험-사항시험-평면
운동장치 시험-원추형 시험이 수행되었다. 실제 잠수함은 레이놀
즈수 약 10
8~10
9의 범위에서 운동한다. 척도효과를 줄이기 위해
서는 레이놀즈수를 실제 운동에 최대한 가깝게 맞추어 모형시험 을 수행하는 것이 바람직하다. 서울대학교 예인수조가 보유하고 있는 모형시험시스템의 특성상 레이놀즈수(Reynolds Number, Rn) 3.12×10
6에서 모형시험이 가능하였다. 아음속 풍동 (subsonic wind tunnel)에서 모형시험을 수행하면 유체의 밀도는 작으나, 모형의 크기를 키울 수 있고 풍속 또한 예인속도의 20배 정도로 수행할 수 있기 때문에 수조시험보다 약 1.7배 높은 레이 놀즈수에서 모형시험을 수행할 수 있다. 또한 수조모형시험보다 큰 입사각으로 사항시험이 가능하다. 제어판시험의 경우 수조모형 스케일에서의 제어판의 코드(chord) 길이가 5cm미만으로 매우 작 기 때문에 정확한 각도로 맞추기 어렵고, 각각의 제어판각도의 조 건마다 크레인으로 모형을 물 밖으로 꺼내어 정렬한 후 다시 예인 전차에 탑재해야 하는 등 제어판시험을 수행하는데 어려움이 따 른다. 제어판시험수행의 어려움과 보다 높은 레이놀즈수에서의 시 험수행을 위해, 아음속 풍동에서 사항시험 및 제어판 시험이 수행 되었다. 서로 다른 레이놀즈수에서 수행된 두 시험결과에 대한 비 교검증을 수행하였다. 수조모형시험과 풍동모형시험의 모형크기, 예인 속도 및 풍속, 레이놀즈수를 Table 2에 정리하였다.
Table 2 Parameters of the MBTs blowing model
Item Value
Wind tunnel Towing tank
Model length L 1.92m 1.30m
Velocity U 40m/s 2.4m/s
Reynolds
number Rn 5.11×10
63.12×10
6각각 시험결과 및 유체력 미계수 도출방법에 대한 자세한 설 명은 Park (2016)의 연구에서 확인할 수 있다.
3. 안전운항영역
3.1 안전운항영역 개요
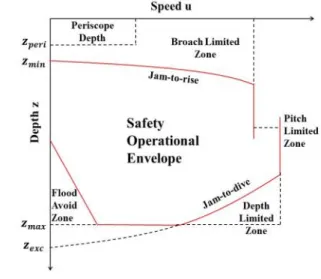
안전운항영역은 제어판의 오작동이나 침수가 발생했을 경우, 적절한 회복 동작을 취했을 때 함의 안전을 보장해주는 속도-심 도-종동요각 영역으로 정의한다. 깊어질수록 증가하는 수압으로 인하여 발생할 수 있는 함의 손상을 방지하기 위한 최대잠항심도 가 설정되고, 수면 근처에서 운항하는 경우 수상함과의 충돌을 피하기 위한 최소운항수심이 설정된다. Fig. 4는 잠수함의 안전 운항영역 도표를 보여준다.
안전운항영역 도표에서 표현된 경계 조건에 대한 설명은 아래 와 같다.
최대잠항심도(maximum safety depth,
max): 잠수함의 정 상상태 최대 운항심도
최대이탈심도(maximum excursion depth,
): 제어판의 오작동으로 인해 잠항하는 경우(jam-to-dive)나 침수와 같은 사
고 상황에서 복구를 수행했을 때 파괴심도(collapse depth) 를 넘지 않는 것을 보장하는 최대의 허용가능심도, 파괴심도는 잠수 함의 압력선체가 더 이상 외압을 지탱할 수 없는 심도를 의미함.
최소운항심도(minimum safety depth,
min): 수면근처에서 운항하는 경우, 수상함과의 충돌을 피하기 위해 설정한 심도
잠망경심도(periscope depth,
): 잠망경(periscope) 또 는 스노클을 운용하기 위한 심도
침수불가영역(flood avoid zone): 깊은 심도에서 낮은 속도 로 운항하는 경우, 침수가 발생했을 때 부상하기 위한 충분한 운동 에너지를 갖지 못하므로 이를 방지하기 위하여 설정된 제한영역
수면끌림제한영역(broach limited zone): 제어판의 오작동으 로 인해 상승(jam-to-rise)하여 해면상에 노출 또는 수상함과의 충돌을 피하기 위해 제한한 영역
종동요각 제한영역(pitch limited zone): 과도한 종동요각으 로 인해 추진계통이 손상을 받게 되거나 다른 예기치 못한 손상 을 방지하기 위해 설정된 제한영역, 긴급부상 중에는 제한을 벗 어날 수도 있음.
심도제한영역(depth limited zone): 제어판의 오작동이나 침 수로 인해 최대잠항심도를 이탈하는 것을 방지하기 위해 설정된 제한영역
Fig. 4 SOE diagram
3.2 사고상황 및 대응수단
잠수함의 운항 중 발생할 수 있는 사고 상황은 재밍과 침수가 있다. 재밍은 최종지시 타각에서 선미 혹은 선수 수평타가 제어 불능한 상태가 되는 경우, 조종시스템 고장으로 인하여 선미 혹 은 선수 수평타가 영구적으로 전타하는 경우로 나뉜다. 침수는 함 손상으로 인한 해수의 유입을 의미한다. 재밍 상황에서 회복 하기 위한 대응수단은 아래와 같이 정리할 수 있다.
정상적으로 작동 가능한 다른 제어판의 반대 타효를 이용
추진기 역회전을 이용한 긴급정지
주 부력탱크 블로잉을 이용한 긴급부상
침수 상황에서 대응하는 수단은 아래와 같다.
선수 ․ 선미 수평타를 상승 방향으로 전타
가속
주 부력탱크 블로잉을 이용한 긴급부상
3.3 안전운항영역 설정
안전운항영역은 앞서 설명한 사고 상황마다 다르게 정의될 수 있다. 본 논문에서는 선미 수평타가 오작동 하는 경우만을 고려하 였으며, 침수가 발생한 경우는 고려하지 않았다. 제어판으로 인한 사고 상황은 제어판의 오작동 방향에 따라 수면으로 떠오르는 경 우와 잠항하는 경우로 나눌 수 있고, 각 상황마다 대응방법을 달 리해야 한다. 수면으로 떠오르는 경우 주 부력탱크 블로잉의 사용 은 불가하므로, 오작동이 일어나지 않은 선수 수평타를 잠수하는 방향으로 조작함과 동시에 추진기 역회전을 이용하여 정지하는 방법인 긴급정지로 대응할 수 있다. 안전운항영역의 jam-to-rise 경계는 긴급정지를 수행하는 동안 초기심도에서부터 벗어난 심도 에 최소운항심도를 더해주어 구할 수 있다. 본 논문에서 최소운항 심도는 최대잠항심도 대비 4%에 위치한다고 가정하였다.
제어판의 오작동으로 인하여 잠항하는 상황에서는 긴급부상을 이용하여 대응할 수 있다. 긴급부상은 작동 가능한 제어판은 선 수의 종동요각을 키울 수 있는 방향(bow up)으로 조작함과 동시 에, 추진기 회전을 멈추어 잠항속도를 감소시켜 타효를 줄인다.
동시에 함수 부력탱크만을 블로잉하여 선수의 종동요각을 키우 고, 종동요각이 0° 이상이 되면 함미 부력탱크를 블로잉하고 추 진기 회전을 증가시켜 빠르게 부상할 수 있도록 한다. 안전운항 영역의 jam-to-dive 경계는 속도별로 최대잠항심도 혹은 최대이 탈심도로 결정한다. 임의의 속도에서 최대이탈심도가 최대잠항심 도보다 큰 경우, 즉 최대잠항심도에서 운항하고 있을 때 사고가 발생해도 긴급부상을 수행하면 파괴심도를 넘지 않는 경우에는 jam-to-dive경계를 최대잠항심도로 결정된다. 임의의 속도에서 최대잠항심도가 최대이탈심도보다 큰 경우는 jam-to-dive경계를 최대이탈심도로 결정한다. 최대이탈심도는 초기심도를 최대잠항 심도로부터 조금씩 낮춰가며 긴급부상 시뮬레이션을 수행하여 파괴심도를 넘지 않는 것을 보장하는 최대의 초기심도를 찾는 방 법으로 산출한다. 본 연구에서 파괴심도는 최대잠항심도 대비 120%에 위치한다고 가정하였다.
안전운항영역을 설정하는 데 있어 고려해야 할 요인으로 반 응 시간(reaction time)이 있다. 반응시간이란 사고 후 대응수단 을 취할 때까지 걸리는 시간을 의미하며, 사고의 인지시간과 대 응수단을 시작할 때까지 걸리는 시간의 합으로 정의된다. 사고의 인지시간은 사고를 인식하고 대응수단을 가동시키는 순간까지의 시간을 의미한다. 반응시간은 승무원의 훈련 정도에 따라 달라진 다. 본 연구에서는 사고를 인지하는데 필요한 시간이 5초, 복구수 단을 시작하는 데 필요한 시간이 10초가 소요된다고 가정하였다.
본 논문에서는 앞서 설명한 방법으로 긴급정지 및 긴급부상 시뮬레이션을 수행하였다. 초기속도조건으로 설계속도 대비 초기 속도
를 0.1-1까지 0.1간격으로 설정하였다. 시뮬레
이션이 시작되고 20초 후에 심도를 변경하기 위한 제어판 조작 이 시작되는데, 선미 수평타의 오작동이 일어나 +13° 혹은 -13°
에서 제어불능 상태가 되는 경우를 가정하였다. 안전운항영역을 설정하기 위한 시뮬레이션 조건을 정리하면 Table 3과 같다.
Table 3 Simulation conditions for the SOE set-up
Item Value
Jam-to-rise Jam-to-dive Stern plane jamming angle -13° 13°
Bow plane reaction angle -35° 35°
Initial speed / design
speed 0.1-1, 0.1 interval Minimum safety depth /
Maximum safety depth 0.04 Collapse depth /
Maximum safety depth 1.2
Reaction time 15s
긴급정지 시뮬레이션에 앞서 긴급부상 시뮬레이션을 수행하였 다. 긴급부상을 시작하여 잠항을 멈추고 초기에 운항하고 있던 심도에 대비하여 10% 이상 떠오르게 되면 복구가 성공했다고 가 정하고 시뮬레이션을 종료하였다. 초기심도는 최대잠항심도에서 수행하였고, 오버슈트로 인하여 파괴심도를 넘는 경우에는 초기 심도를 조금씩 줄여가며 시뮬레이션을 재수행하여 최대이탈심도 를 찾았다. 긴급부상 시뮬레이션 결과의 예로 설계속도 대비 초 기속도 0.8에 대한 분석만을 다루고 나머지 시뮬레이션 결과는 수록하지 않았다. Fig. 5와 Fig. 6은 긴급부상 시뮬레이션 결과를 보여준다.
Fig. 5 Emergency rising maneuver simulation results (depth, pitch, speed, and propeller revolution)
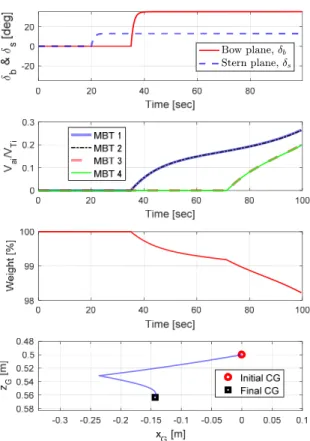
Fig. 6 Emergency rising maneuver simulation results (control surfaces, air volume fraction, weight, and CG)
Fig. 6의 첫번째 그래프는 선수 ․ 선미 수평타각을 보여준다.
시뮬레이션이 시작되고 20초 후에 잠항을 시작하는 상황에서 선 미 수평타의 오작동이 일어나 13°에 고정된다. 오작동이 일어난 후 15초 후에 사고를 인지하고 대응하여 잠수함이 잠항하는 반 대 방향으로 움직일 수 있도록 고장이 일어나지 않은 선수 수평 타를 양의 방향으로 전타 하는 것을 볼 수 있다. Fig. 5의 세, 네 번째 그래프는 각각 선속과 추진기의 회전수를 보여준다. 타효를 줄이기 위하여 추진기 회전을 감소시킨다. 약 72초에 양의 종동 요각이 되면서 추진기 회전수를 증가시켜 선속이 빨라지는 것을 알 수 있다. Fig. 5의 첫, 두 번째 그래프는 잠수함의 심도 및 종 동요각의 변화를 보여준다. 20초 이후 선미 수평타의 오작동으로 선수가 아래를 향하게 되어 잠항이 시작된다. 주 부력탱크 블로 잉과 선수 수평타의 전타로 인하여 잠항 상황에서부터 벗어나는 것을 알 수 있다. Fig. 6의 두 번째 그래프는 i번째 부력탱크의 전체 부피
대비 물의 배출로 인한 빈 공간의 부피
를 보 여준다. 긴급부상 초기에 함수 주 부력탱크인 1, 2번 부력탱크의 블로잉이 먼저 시작되고, 종동요각이 0°이상이 되자 함미 주 부 력탱크인 3, 4번 부력탱크의 블로잉이 시작되는 것을 알 수 있 다. 1, 2번 부력탱크의 25%, 3, 4번 부력탱크의 20% 정도의 배출이 되었을 때 제어판 오작동으로 인한 잠항으로부터 복구되 는 것을 알 수 있다. Fig. 6의 3번째 그래프는 잠수함 무게의 변 화를 보여준다. 사고에서 복구될 때까지 배수량의 약 2%만큼의 평형수가 배출되는 것을 알 수 있다. Fig. 6의 4번째 그래프는
시뮬레이션 동안의 잠수함 무게중심의 변화를 보여준다. 붉은 원 모양은 초기의 무게중심을 의미하며 검은 사각형은 시뮬레이션 종료 시점에서의 무게중심을 의미한다. 긴급부상 시스템이 가동 된 후 1, 2번 부력탱크에서 출수가 먼저 이루어지기 때문에 잠수 함의 길이방향 무게중심(Longitudinal Center of Gravity, LCG)이 선미 쪽으로 이동하다가 3, 4번 부력탱크의 출수가 이루어짐으로써 다시 앞쪽으로 이동하는 것을 알 수 있다. 잠수함 수직방향 무게중 심(Vertical Center of Gravity, VCG)은 약 6 cm정도 낮아진다.
초기속도가 긴급부상에 미치는 영향을 파악하기 위하여 선속 별 긴급부상 시뮬레이션 결과를 비교해 보았다. 시뮬레이션 결과 중, 오버슈트가 커서 최대이탈심도가 최대잠항심도보다 작은 선 속 0.8, 0.9, 1조건에서의 계산결과를 Fig. 7에 비교하였다.
Fig. 7 Comparison of the emergency rising maneuvering simulation results
속도별 긴급부상 시뮬레이션 결과를 비교해 보면, 속도가 빠 를수록 잠수함에 작용하는 제어판의 모멘트가 크기 때문에 종동 요각 변화의 크기가 더 커진다. 종동요각이 아래를 향한 상태에 서 속도가 빠르면 그만큼 심도의 변화도 빠르게 이루어지므로 초 기 운항심도로부터 심도이탈(depth excursion)이 커지는 것을 알 수 있다. 속도가 빠를수록 오버슈트(overshoot)가 크기 때문에 사고부터 복구되는 시간도 오래 걸리는 것을 확인할 수 있다. 시 뮬레이션으로 결정한 속도 별 최대이탈심도에서 사고가 일어나 도 긴급부상을 수행하면 파괴심도를 넘지 않는 것을 알 수 있다.
다음으로 제어판 오작동으로 인해 수면으로 떠 오르는 상황에
서부터 복구하기 위한 대응방법인 긴급정지 시뮬레이션을 수행
하였다. 초기심도는 0.6
max로 설정하였고, 수면으로 떠오르는
사고에서는 추진기의 역회전을 시작하여 함이 정지하게 되면 복
구가 성공했다고 가정하였다. 본 장에서는 긴급정지 시뮬레이션
결과의 예로 설계속도 대비 초기속도 0.8에 대한 분석을 다루고
나머지 시뮬레이션 결과는 수록하지 않았다. Fig. 8은 긴급정지
시뮬레이션 결과를 보여준다.
Fig. 8 Crash stop simulation results
시뮬레이션 시작 20초 후 심도변경을 수행하고, 제어판의 오 작동으로 인해 종동요각이 커지면서 선체가 수면으로 향하게 되 어 초기에 운항하고 있는 심도로부터 이탈하는 것을 알 수 있다.
사고를 인지하고 반응한 35초부터 추진기의 역회전이 시작되고 선수 제어판은 선체를 잠항하기 위한 방향으로 조작한다. 복구수 단의 가동으로 인해 종동요각이 줄어들게 되고 선체도 점차 멈추 는 것을 확인할 수 있다. 초기속도가 긴급정지에 미치는 영향을 파악하기 위하여 선속조건 0.2, 0.6, 1에서의 긴급정지 시뮬레이 션 결과를 Fig. 9에 비교해 보았다.
속도의 변화가 표현된 첫 번째 그래프를 보면 초기 속도가 빠 를수록 정지하기 까지 걸린 시간이 큰 것을 알 수 있다. 속도가 빠를수록 제어판의 모멘트가 크기 때문에 종동요각 변화의 크기 가 더 크다. 초기속도가 빠를수록 상대적으로 긴 시간 동안 큰 종동요각으로 움직였기 때문에 심도이탈 역시 큰 것을 확인할 수 있다. 속도별 긴급부상 시뮬레이션 결과들을 종합하여 jam-to-dive 경계를 도출하고, 속도별 긴급정지 시뮬레이션 결과 들을 종합하여 jam-to-rise 경계를 도출하여 설정된 안전운항영 역은 Fig. 10과 같다.
속도가 빠를수록 심도이탈이 커지게 때문에 운항영역 경계의 폭이 줄어드는 것을 알 수 있다. 주 부력탱크 블로잉을 이용한 긴급부상이 추진기 역회전을 이용한 긴급정지보다 더 빠르고 효 과적인 대응수단이기 때문에 긴급부상을 이용하여 도출된 아래 쪽 안전운항영역이 긴급정지를 이용하여 도출된 위쪽 안전운항 영역보다 더 넓은 것을 알 수 있다.
Fig. 9 Comparison of the crash stop simulation results
Fig. 10 Safety operational envelope of the submarine
4. 결 론
본 연구는 제어판의 재밍으로 인한 사고가 발생하였을 때, 잠
수함의 안전한 복구를 보장하는 안전운항영역을 예측하기 위한
방법을 제시하였다. 안전운항영역 설정에 앞서 잠수함의 6자유도
운동방정식 모델링 및 유체력 미계수 도출이 선행되었다. 조종운
동방정식은 Gertler and Hagen (1967) 모형을 바탕으로 작성되
었다. 안전운항영역 도출을 위한 시뮬레이션 상황인 긴급부상 및
긴급정지 상황을 모사하기 위해 추진기 및 주 부력탱크 블로잉에
대한 모델링이 수행되었다. 안전운항영역을 구성하고 있는 각 변
수들에 대한 설명과, 잠수함에서 발생할 수 있는 사고 상황 및
대응수단을 정리하고 설명하였다. 속도 별 긴급부상 및 긴급정지 시뮬레이션을 통하여 대상 잠수함에 대한 안전운항영역을 설정 하였고, 아래와 같은 결과를 도출할 수 있었다.
긴급부상 및 긴급정지 시 초기진입 속도가 빠르면 그만큼 심도의 변화도 빠르게 이루어져 초기운항심도로부터 심도이탈이 커지고 사고로부터 복구되는 시간도 오래 걸린다.
주 부력탱크 블로잉을 이용한 긴급부상이 추진기 역회전을 이용한 긴급정지보다 더 효과적인 대응수단이다.
후 기
본 연구는 국방과학연구소(UE120033DD)의 지원으로 수행된 연구결과 중 일부임을 밝히며, 연구비 지원에 감사드립니다.
References
Bettle, M.C. Gerber, A.G. & Watt, G.D., 2009.
Unsteady analysis of the six DOF motion of a buoyantly rising submarine. Computers & Fluids, 38(9), pp.1833-1849.
Feldman, J., 1979. DTNSRDC revised standard submarine equation of motion. DTNSRDC SPD-0393-09. Maryland: David W. Taylor Naval Ship R&D Center.
Feldman, J., 1995. Method of performing captive-model experiments to predict the stability and control characteristics of submarines.
CRDKNSWC-HD-0393-25. Maryland: Carderock Division Naval Surface Warfare Center.
Gertler, M. & Hagen, G.R., 1967. Standard equation of motion for submarine simulation. NSRDC-Report SR 009 01 01, Task 0102. Maryland: David W.
Taylor Naval Ship R&D Center.
Jeong, J.H. Han, J.H. Ok, J. Kim, H.D. Kim, D.H.
Shin, Y.K. & Lee, S.K., 2016. Prediction of hydrodynamic coefficients for underwater vehicle using rotating arm test. Journal of the Korean Society of Ocean Engineers, 30(1), pp.25-31.
Jung, J.W. Jeong, J.H. Kim, I.G. & Lee, S.K., 2014.
Experimental study on hydrodynamic coefficients of autonomous underwater glider using vertical planar motion mechanism test. Journal of the Korean Society of Ocean Engineers, 28(2), pp.119-125.
Kim, Y.G., Yun, K.H., Kim, S.Y. & Kim, D.J., 2012.
Captive model test of submerged body using
CPMC. Journal of the Society of Naval Architects of Korea, 49(4), 296-303.
Lee, J.H., 2004. A study on the safety operational envelope of a submerged body considering 6-DOF motion. Master’s Thesis, Seoul National University, Republic of Korea.
Lewandowski, E., 1991. Tests of a submarine model in coning motion. Davidson laboratory technical Report 2660. New Jersey: Stevens Institute of Technology.
Mackay, M., 1992. DREA submarine simulation program version 0.2 (DSSP02) - Release notes, DREA TC 92/308, April, DISTRIBUTION LIMITED.
Atlantic: Defence Research and Development Canada.
Nguyen, V.D., Drolet, Y. & Watt, G.D., 1995.
Interference of various support strut configurations in wind tunnel tests on a model submarine.
Proceedings of the 33rd Aerospace Sciences Meeting and Exhibit, Reno, Nevada, January 1995.
Park, J.Y., 2016. Design of a safety operational envelope protection system for a submerged body.
Ph.D Thesis. Seoul National University, Republic of Korea.
Park, J.Y. Kim, N. Rhee, K.P. Yoon, H.K. Kim, C.
Jung, C. Ahn, K. & Lee, S., 2015. Study on coning motion test for submerged body. Journal of the Korean Society of Ocean Engineers, 29(6), pp.436-444.
Park, J.Y. Kim, N. & Shin, Y.K., 2016. Design of Pitch Limit Detection Algorithm for Submarine . Journal of the Korean Society of Ocean Engineers, 30(2), pp.134-140.
Quick, H. Widjaja, R. Anderson, B. Woodyatt, B.
Snowden A.D. & Lam, S., 2012. Phase I experimental testing of a generic submarine model in the DSTO low speed wind tunnel. DSTO Technical Note, DSTO-TN-1101. Australia: Defence Science and Technology Organisation.
Quick, H. Widjaja, R. Anderson, B. Woodyatt, B.
Snowden, A.D. & Lam, S., 2014. Phase II experimental testing of a generic submarine model in the DSTO low speed wind tunnel. DSTO Technical Note, DSTO-TN-1274. Australia: Defence Science and Technology Organisation.
Rhee, K.P. Yoon, H.K. Sung, Y.J. Kim, S.H. & Kang,
J.N., 2000. An experimental study on hydrodynamic
coefficients of submerged body using planar motion
mechanism and coning motion device. International Workshop on Ship Maneuverability, 2000, pp.1-20.
Seol D.M. Rhee, K.P. & Yeo, D.J., 2005. An experimental study of the submerged depth effect on the manoeuvrability in a horizontal plane of an underwater vehicle. Journal of the Korean Society of Ocean Engineers, 42(6), pp.551-558.
Shin, Y.K. & Lee S.K., 2005. A study on the modeling of hydrodynamic coefficient for the emergency maneuver simulation of underwater vehicle, Journal of the Society of Naval Architects of Korea, 42(3), pp.601-607.
Shin, Y.K., 2007. Prediction of hydrodynamic coefficients for maneuvering of underwater vehicles.
Ph.D Thesis. Pusan National University, Republic of Korea.
Society of Naval Architects of Korea, 2012. Warship.
Textbooks: Republic of Korea. pp.358-360.
Watt, G.D., 2007. Modelling and simulating unsteady six degrees-of-freedom submarine rising maneuvers. DRDC Atlantic TR 2007-008. Atlantic:
Defence Research and Development Canada.
박 종 용 김 낙 완 신 용 구