열차제어시스템의 아키텍처 기반 고가용도 모델 적용에 관한 연구
A Study on the Architecture-based Model of High Availability of Railway Control Systems
이경행 † ·권용수 1
Kyoung-Haing Lee · Yong-Soo Kwon
1. 서 론
최근고가용도시스템구축을위한 노력은리눅스 데이터 시스템
,
자바시스템응용서버,
이동통신시스템및각종네트 워크관리시스템등에서도나타나고있다.
고가용도는시스 템의고장이발생했을때중단없는서비스를제공할수있 는능력을말하며,
흔히“Five-9's”
시스템이라부르는99.999%
의가용도를의미한다
[1].
현대철도시스템은 무인화·자동화 방향으로기술이급속히발전하고있으며특히
,
열차제 어시스템은승객의안전성과 신뢰성확보차원에서 고가용 도시스템으로설계되어져야한다.
기존의연구에서는단순시 스템의 가용도 모델을 적용하였으며,
하드웨어 리던던시(redundancy)
와빠른소프트웨어복구메커니즘,
다양한고장에따른 다양한수리방법
(manual, automatic switchover)
및 시간등을반영하지않아오늘날첨단고가용도철도시스템의 적용에어려움이있다
[8,9].
이러한관점에서본 논문은다양한시스템특성에따라적용될수있는고가용도모델
링의 방법론을제시하고철도시스템 중고가용성이반드시 요구되어지는열차제어시스템에대한아키텍처기반의고가 용도 모델을제시하였다
.
제시된 모델은UML2.0
의상태전 의다이어그램을활용하여시스템인터페이스와추적성을보 장하였다.
2. 시스템 가용도 관리체계
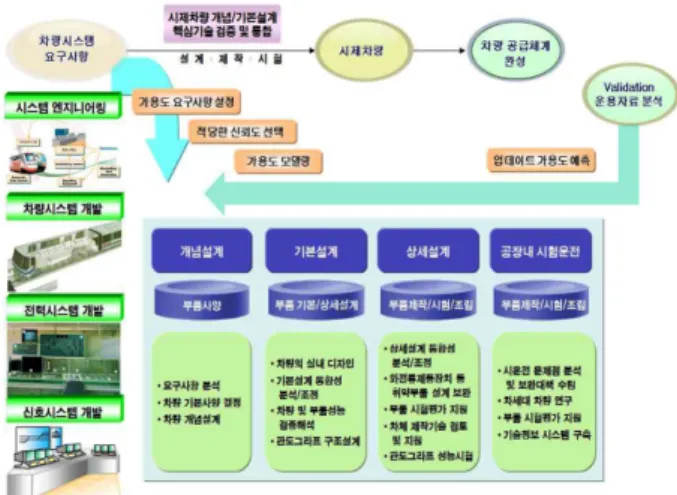
2.1 시스템 가용도(System Availability)일반적인철도시스템의개발과정은
Fig. 1
과같이 요구사항분석
,
설계,
제작,
시험/
평가및 공급체계완성으로 이루 어지며,
개발각단계별로시스템엔지니어링프로세스(
요구사항분석
,
기능분석/
할당,
설계조합및 시스템분석/
통제)
가반복된다
[2].
개념설계단계에서는시스템가용도요구사항이 설정되며
,
이를만족하는시스템아키텍처와적당한신 뢰도기술이선택되어진다.
이를기반으로정량적인시스 템 성능특성과실현가능성을보증하는가용도 모델링을실 시한다.
모델링을통해산출된가용도는기본/
상세설계,
개발및시험과정을통해업데이트되며
,
양산후확인(validation)
과 운용자료분석과정을통해설정된요구사항과의갭(gaps)
을Abstract
This work describes an availability model of highly available systems to achieve Five-9's availability. Modern railway systems have raised users’ expectations of powerful “always on” services. The crucial characteristics of these highly available services are essential to many modern businesses area, such as telecommunications, railway systems, information operations, Web-based businesses, and so on. The architecture-based model of system availability is useful to assess the fea- sibility of meeting a high availability target. The Markov model approach is straightforward for relative system engineers to adapt when they model highly available system failure and the failure recovery process. This work proposed the improved availability model through UML2.0. It is shown that the architecture-based model of system availability is a good reasonable by its application of the railway systems.
Keywords
: System availability, Markov model, Five-9's
초 록 본 연구는
Five-9's
가용도를 달성하기위한 고가용도시스템의가용도 모델을 기술한다.
현대의 철도시 스템은 지속적으로 서비스가 제공되어야 하는 고가용도 시스템으로 이러한 고가용도 서비스의 중요한 특성은 이동통신,
철도시스템,
정보운영 및 웹기반 사업 등 많은 현대의 사업에 필수적이며,
아키텍처기반의 시스템 가 용도 모델은 고가용도목표의 만족여부를평가하는 데 매우유용하다.
마코브 모델접근은 관련 시스템엔지니어 가 시스템고장 및 고장복구 프로세스를 모델링할 때 직관적으로 적용가능하다.
본 연구는UML2.0
을 사용하여 개선된 가용도 모델을 제시하였다.
이러한 아키텍처기반의 시스템 가용도 모델은 철도시스템에 매우 의미있게 적용될 수 있다.
주요어 : 시스템가용도
,
마코브모델†
교신저자 : 국방대학교 무기체계학과 E-mail : [email protected]
1
국방대학교 무기체계학과
식별한다
.
갭이존재하면가용도와신뢰도를개선하기위한로드맵핑및 투자등을 고려해야한다
[1].
시스템 가용도는시스템이주어진시간동안 요구된기능을정상적으로 수행
할확률로서정의되며
[1], Table 1
과같이 규격,
목적및 관련분야에따라 다양한가용도모델이사용된다
.
철도시스템 과같은고가용도시스템은자동적으로고장을감지,
경보,
분리및복구하는
(
일부품목에대한스위칭,
자동고장복구등)
기능을 보유하고 있으며
,
일부의 능력손실에도 주기능성(primary functionality)
을 유지할 수 있다.
따라서철도시스템은요소
(element)
뿐만아니라서비스관 점의가용도가더중점적으로고려되어져야한다.
그러나지 금까지발표되었던대부분의철도분야논문에서는고가용도를고려하지않았으며
,
최근에발표된2008
년도정인수등[8]
은철도차량의정량적 신뢰성·가용성·유지보수성목표값설정에관한연구에서
IEC62278
을,
그리고2007
년도서용준 등
[9]
의 자기부상시스템 서비스가용도에서도MIL-
HDBK-338B
를적용함으로써고가용도를 직접적으로다루지 않았다
.
2.2 고가용도 시스템 설계를 위한 개념적 모델 고가용도시스템은고장탐지기에의해 잠재적인고장
,
제품속성
(
하드웨어/
소프트웨어)
및비제품속성(
절차상의실수,
운용자에의한오작동및화재등
)
고장등이자동적으로탐지되어야한다
. Fig. 2
와 같이고장이탐지되면시스템로직(system logic)
에 의해 고장을진단및 분리하고 하드웨어/
소프트웨어메커니즘에의해적합한복구활동을실시한다
.
자동적인 복구가실패할경우 운용자의매뉴얼복구활동을 실시한다
.
Fig. 2
Model of high-availability systems 3. 마코브 가용도 모델링
이전에는 단순시스템의 가용도만을주로고려하였으나
, 2009
년 발표된미 국방부의RAM-C Report Manual[6]
에서는 복잡시스템의 가용도를 산정하는데 있어서 마코브
(Markov)
적접근방법을적극권장하고있다.
그러나, RAM-
C Report Manual
에서는Table 1
과 같이 이전의모델을 장비
(materiel)
와 운용의관점으로만기술할뿐 구체적인마코브 모델링의방법론은언급되어있지 않다
.
마코브모델은 스토케스틱(stochastic)
프로세스의적용으로시간과공간에관하여이산적으로혹은연속적으로시스템을모델링하는것 이다
.
가용도를모델링하는방법에는RBD(Reliability Block Diagram),
마코브 모델, Fault tree
모델, Minimal cut-set method, Petri-net, Monte Carlo simulation
등이있으며,
이Table 1
Availability definitiom
구 분 가 용 도
MIL-HDBK- 338B[3]
·순간가용도
·임무가용도
·정상상태가용도
·성취가용도
·고유가용도
EN50126[4]
·가용도IEC62278[5]
·운용가용도
·성취가용도
·고유가용도
DoD RAM-C Report Manual[6]
·물자가용도
·운용가용도
TL 9000's QMSH[7]
·서비스가용도 - 고전적 - 고객관점
A t
( )1
∆
t --- ∫
0∆t A t
( )d t
∆
lim t
→0= A m
(t
2– t
1)1
t
2– t
1--- t A t
( )d t
1
t
2= ∫ A s A t
( )t lim
→∞=
A a Uptime Uptime Downtime + ---
=
A i MTBF MTBF MTTR + ---
=
A TUT
TUT TDT +
--- MTBF MTTR --- MTBF +
= =
A o Uptime Uptime Downtime + ---
=
A o TUT
TUT TDT + PM + TDT CM ---
=
A i MTBF MTBF MTTR + ---
=
A m MTBM MTBM MDT + ---
=
A o Uptime Uptime Downtime + ---
=
A TUT
TUT TDT +
--- MTTF MTTR --- MTTF +
= =
A
Service time Outage Loss
×Outage events ∑
–
Service time
---
=
Fig. 1
Application process of system availability
중마코브모델은시스템엔지니어나설계자가직관적으로시 스템고장및고장복구프로세스를 모델링할때적용할수있 는좋은방법중의하나이다
.
마코브모델은마코브체인이론을기초로 하며상향식
(bottom-up)
으로시스템,
하부시스템 및 구성품
(component)
의 부분고장,
능력손실(capacity
loss)
및수리전략을세부적으로수립할수있는장점이있다
.
따라서여기서는시스템의구성요소및 상태의순서와 기능에대한모델링이가능하고시스템아키텍처의연관성및 추적성을보장하는UML(Unified Modeling language) 2.0
의 상태전이다이어그램을사용하여마코브모델링을수행하였 으며,
이를 기반으로 시스템 가용도를 도출하였다.
3.1 마코브 모델 기본이론
여기서
,
상태전이다이어그램은시스템가용도에대한 포 괄적인이해를돕기 위해시스템의가능한상태와한 상태 에서다른상태로전이되는사건의전반적인확률을나타낸 다. Fig. 3
에서상태1
은 정상작동이며,
상태2
는 시스템고장이인식되어복구
(recovery)
가 시작되는상태이며,
상태3
은고장이 발생되었지만인식되지않아 복구활동이시작되 지않은상태를의미한다
.
여기서λ,
µ,
C는각각고장율,
수 리율,
회복인자(coverage factor)
를 나타낸다.
만약시스템이고장나서탐지되었다면시스템은상태
1
에서2
로전이(
Cλ)
되며
,
수리가완료되면µR의수리율을가지고상태1
로 전 이된다.
시스템고장이탐지되지않았을경우에는상태1
에 서3
으로 전이((1-
C)
λ)
되며,
고장이탐지되면상태3
에서2
로 전이
(
µSFD)
된다.
Fig. 3
Markov model for a simplex system
따라서
,
각 상태에서Input
과Output
은 같고모든 확률의합은
1
이므로 다음과 같은 방정식을 세울 수 있다.
상태
1: (1)
상태
2: (2)
상태
3: (3)
상태
3: (4)
(1)
의식에(3)
을 더한식, (3)
식, (4)
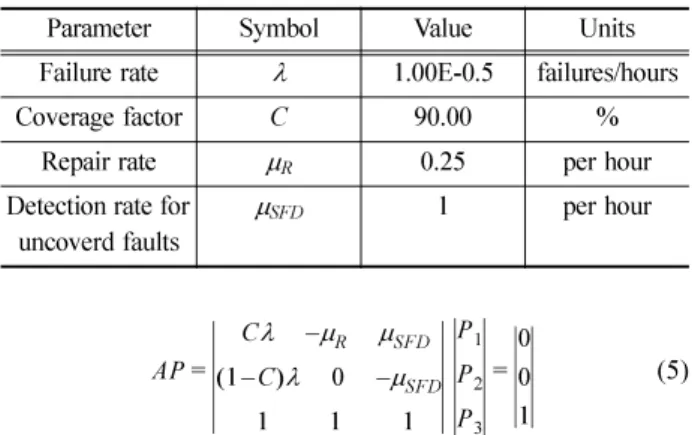
의 식을AP=
R형태 의Matrix
로 표현하면 식(5)
와 같다.
(5)
Table 2
의수치는고가용도설계방법을제시하기위한임의의 값이며
,
λ는 하드웨어의 경우MIL-HDBK-217F
나Telcordia SR-332 Issue 2
등의방법론으로Relex
와같은도 구를이용하여구할수있다[10].
또한,
회복(coverage)
은시 스템에 의해고장이탐지되어 자동적으로복구가시작되는 확률이며,
하드웨어와소프트웨어로구분되어계산된다.
C 는 하드웨어의경우고장삽입 테스트와야전운용자료를토대로예측되며
,
대부분80~95%(
네트워크요소는95~99%)
이다
.
소프트웨어도고장삽입테스트 등을통해 전형적으로80~95%(
잘 설계된고장탐지메커니즘의경우95~99%)
로예측될수 있다
.
하드웨어 C의 하한(lower limit)
과 소프트웨어는 각각 식
(6), (7)
과 같이 나타낼 수 있다.
(6)
(7)
µR과 µSFD은 시스템특성에맞게시스템계층구조상의최하
위 레벨인부품
(part)
단위의시간당비율로서나타낸다.
이와 같은방법으로 임의로설정된
Table 2
의 값을식(5)
에대입하면
,
식(8)
과 같다.
(8)
det(
A − λI)
≠ 0이므로A-1가존재하며,
P=
A-1R에따라A-1와P는 각각 식
(9), (10)
과 같이 구해진다.
(9)
µ
R P
2– C
λP
1–
(1 – C
)λP
1= 0
µ
SFD P
3+ C
λP
1–
µR P
2= 0 1 – C
( )λ
P
1–
µSFD P
3= 0 P
1+ + P
2P
3= 1
AP C
λ–
µR
µSFD
1 – C
( )λ
0 –
µSFD
1 1 1
P
1P
2P
30 0 1
= =
C H W
⁄automatically Recovered Events RE
( )H W ∑
⁄All critical events
H W ∑
⁄---
≥
C S W
⁄Unique critical alarms Manually RE
S W ∑
⁄S W ∑
⁄–
Unique critical alarms
S W ∑
⁄---
=
AP 0.000009 0.25 – 1 0.000001 0 1 –
1 1 1
P
1P
2P
30 0 1
= =
A
–13.99983601 4.999795 0.999959 3.99984
– – 3.9998 4 10
× –53.998 10
× –6– 1 1 10
× –6=
Table 2
Input parameters for modeling example
Parameter Symbol Value Units
Failure rate
λ1.00E-0.5 failures/hours
Coverage factor
C90.00 %
Repair rate
µR0.25 per hour
Detection rate for
uncoverd faults
µSFD1 per hour
(10)
Table 3
은 식(10)
에서 계산된각 상태에서의 확률을 도표로나타낸것이며
,
전체상태인1
년이525,960
분이므로불가동시간은불가동상태인
2, 3
의시간을합산한21.57
분이다.
마코브적접근은프아송
/
지수분포와같은시스템의행동이일정한고장과복구율을갖는제차성
(homogenous),
무기억성
(memoryless)
의 확률분포에적합하다.
이는외부의영향에대해고장과복구율이상태가전이되는각시간에서일 정한시스템에적용된다는것이다
.
만약확률이시간의함 수이거나이산스텝일경우에는 다른접근방법을 적용해야 한다.
3.2 Active-Active Model
Active-Active Model
은 한유닛(unit)
이다운되었을때 다른유닛으로작동이전환될때까지
50%
의능력손실이발생하는 이중의
(duplex)
시스템에 적용이 가능하다.
적용가능한대표적인장비로는허브및라우터등이있다
.
한 유닛의고장시 자동적으로탐지되었을 경우상태
4
로전이되며
,
고장복구에성공시에는상태2
로,
실패시에는 상태5
로전이된다.
이때 수동적인복구과정이시작되어성공시 상태
2
로전이되어수리과정이시작되고,
실패시 상 태6
으로전이되어모든유닛이고장상태가 된다.
한유닛의고장이자동적으로탐지되지않았을경우탐지될때 까 지 상태
3
으로전이되며,
탐지된이후에는같은절차가반복된다
.
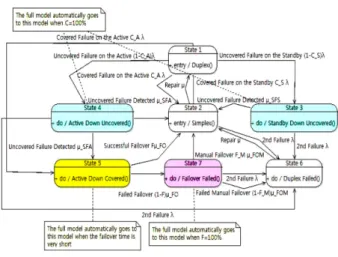
완전결함복구(failover),
순간결함복구및모든 고장이 탐지된 순간결함복구를 포함한 이러한 과정을
Full Active-Active Model
이라하며,
이를UML2.0
을사용하여모델링 한 것을
Fig. 4
와 같이 나타냈다.
그림에서완전결함복구는자동적으로결함이완전복구되 는 것으로
F
값이1(100%)
이 되며, State 5
는 생략된다.
순 간 결함복구는결함복구 시간이매주짧게발생하는것으로State 4, 5
가 생략된다.
모든고장이 탐지된순간결함복구는 C값이
1(100%)
이 되며, State 4, 5
및6
이 생략된다.
3.3 Active-Standby Model
Active-Standby Model
은한유닛이서비스를제공하는동안보조유닛이대기상태
(standby)
에있는이중의형상품목에 사용된다.
대표적인시스템의유형으로데이터베이스서버를 들 수 있다
.
Active-Standby Model
은Active-Active Model
에서상태3
이 추가된 것으로 작동 중인 유닛에 대한 고장 시에는
Active-Active Model
의 과정과 동일하며,
대기상태에있는유닛이고장날경우자동적으로탐지되면상태
2
로,
자동적 으로탐지되지않으면상태3
으로전이된다.
작동상태유닛의수동복구실패와대기상태유닛의탐지가실패할경우상 태
6
으로전이되어모든유닛이고장상태가된다.
즉, Active-
Standby Model
에서는첫번째데이터베이스서버가고장시대기상태에 있는서버로재지정이 이루어져서비스가시작
되는 시스템에사용된다
.
이를UML2.0
을 사용하여모델링한 것을
Fig. 5
에 나타냈다.
Fig. 5
Full active-standby markov model
Active-Active Model
과 마찬가지로완전결함복구는F
값이
1(100%)
이되며, State 7
는생략된다.
순간결함복구는결함복구시간이매주짧게발생하는것으로
State 5, 7
이 생략된다
.
모든고장이탐지된순간결함복구는 C값이1(100%)
이 되며
, State 3, 4, 5
및7
이 생략된다.
3.4 N+K Redundancy Model
N+K Redundancy Model
은N
개의유닛이서비스를제공하는동안
K
개의유닛이보조상태(spare)
에 있는시스템의P A
–1R 0.999959 3.99984 10
× –59.99959 10
× –7= =
Table 3
Probability solution and downtime
State Probability Minutes/year
1 0.999959 525,938.44
2 3.9998E-05 21.04
3 9.9996E-07 0.53
Fig. 4
Full Active-active markov model
경우해당된다
.
이는서비스중인N
개의유닛중1
개의유 닛이고장날때까지K
개의유닛은작동하지않는것으로 시스템에필요한능력이N
개라는 것을의미한다.
대표적인 시스템은네트워크화되어있는보조시스템을포함하며서버 가 클러스터링(clustering)
되는대용량서버,
많은사용자에 게동시에서비스를제공해야하는웹사이트등이해당된다.
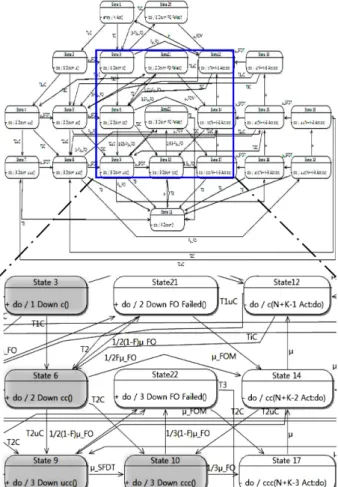
Fig. 6
은서버의 하중이유한의임의시간으로 재분배되는
N+K Load Shared Redundancy Model
을UML2.0
을 사 용하여모델링한것이다.
그림에서수동적인고장복구가요 구될시 기술자가자동탐지되지않은모든고장을발견할 수 있고,
각각의상태는능력손실이 발생하는것으로가정 하였다. N+K Load Shared Redundancy Model
은N
개의 유 닛중1
개가고장시 시스템이다운되지만, K
개의유닛중1
개가고장시에는시스템이정상작동된다.
그림은능력손실을고려하여
Active-Standby Model
을확장한것으로상태2~11
은N
개의유닛중 고장이발생하여시스템이다운된것이며
,
상태12~19
는K
개의유닛중고장이발생하였지만시스템의 다운에는 영향이 없는 것을 보여준다
.
Fig. 6
에서 수동결함복구에대한요구가 발생할때 기술자는 시스템에서 자동적으로 탐지하지 못한 모든 고장
(uncovered fault)
에대한탐색을실시한다.
각각의상태는능 력손실에 따라 구분된다.
3.5 N-out-of-M Redundancy Model
N-out-of-M system
은M
개의구성품(component)
중N
개 가 운용중인시스템으로KTX-II
추진시스템의경우전원공급단
,
팬터그래프,
전동기및냉각기등이해당된다.
냉각기의 경우하나의팬
(fan)
이 고장시 다른팬이더 고속으로 작동하여냉각시스템을유지해야한다
.
기존의철도논문 에서활용되었던RBDs(Reliability Block Diagrams)
모델은이항분포를기반으로시스템의신뢰도를계산한다
[13]. RBDs
는 마코브모델과 비교시고장탐지확률과고장복구프로
세스가고려되지않으므로
N-out-of-M system
을모델링하는데는 부적합하다
. N-out-of-M Redundancy Model
은N+K
Redundancy Model
과유사하며,
고장복구가즉시일어난다는 차이점이있다
.
그림에서작동중인N
을제외한M
개의구성품중
1
개가고장시 자동탐지되면상태2
로,
자동탐 지 되지않으면상태8
로전이된다.
상태8
에서1
개의구성품이더 고장시 자동탐지되면상태
3
으로,
자동탐지되지않으면상태
9
로전이된다. Fig. 7
은이러한과정을M
개까지 반복적으로
UML2.0
을 사용하여 모델링한 것이다.
Fig. 7
N-out-of-M redundancy model
4. 열차제어시스템의 고가용도 모델링 적용
승객 안전에중요한 역할을담당하는철도시스템의열차 제어시스템은 일반적으로 널리 사용되고 있는
PES (Programmable Electronic System)
를 사용하고 있다[12].
PES
는 하드웨어,
펌웨어 및응용소프트웨어로구성되어있으며
, WBS(Work Breakdown Structure)
는Fig. 8
과 같다[13].
특히,
열차의속도,
가속도,
현재및 예정위치에기초해서정확한제어신호를계산하고
,
이러한신호정보를인터Fig. 6
N+K load shared redundancy model
Fig. 8Train control system WBS using tool(relex)
페이스카드를통해열차구동신호로변환하는열차제어시스 템의제어보드는고가용도및신뢰도측면에서매우중요하 다
.
아키텍처는 컴포넌트의구조,
그들의관계및설계를관리하는원리와지침으로 정의된다
[14].
기존의 모델과는달리마코브프로세스는단일유닛별로가용도를합산하여 전 체시스템의가용도를도출하는정교한방법으로도구를활 용한아키텍처의 구현이가능하다
.
따라서본 연구에서는Fig. 8
과같이열차제어시스템의가장중요한단일유닛인제어보드하드웨어를대상으로
Active-Standby
마코브모델 링을 적용하여 가용도를 도출하고자 한다.
각 상태에서
Input
과Output
은 같고모든확률의 합은1
이므로 다음과 같은 방정식을 세울 수 있다
.
상태
1: (1
−CA)
λP1+
CAλP1+
CSλP1+ (1
−C)
λP1=
P2µ(11)
상태
2: (
µ+λ)
P2=
CsλP1+
FµFOP5+ FMµFOMP7+µP6+ µSFSP3
(12)
상태
3: (1
−CSλ)
P1=
µSFSP3+
λP3(13)
상태
4: (1
−CAλ)
P1=
µSFSP4+
λP4(14)
상태
5:
µSFAP4+
CAλP1=
FµFOP5+ (1
−F)
µFOP5(15)
상태
6:
λP3+
λP2+
λP7+
λP4+ (1
−FM)
µFOMP7=
µP6(16)
상태
7: (1
−F)
µFOP5=
FMµFOMP7+
λP7+
(1
−FM)
µFOMP7(17)
(11)~(17)
식을 형태의Matrix
로 표현하면 식(18)
과 같다.
(18)
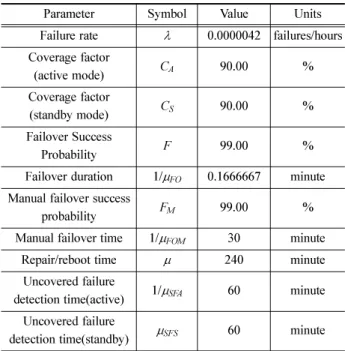
Table 4
는 기존에발표된논문에서구해진열차제어시스템의고장자료를활용한가정값이며
[11],
이값을식(18)
에 대입하여각 상태에서의확률을계산하고시간으로 환산하여나타내면
Table 5
와같다.
불가동시간은불가동상태4, 5,
6
및7
의시간을 합한0.2393
분이며, 1
년이525,960
분이므로 불가용도는
0.2393/525,960
이고가용도는99.9999545%
가된다
.
즉, Table 4
에서가정값의적절한설정여부가고가용도시스템설계의결정적임을알 수있다
.
따라서가정값 의민감도분석등을 통해 고가용도시스템을설계해야한다
. Table 1
에 나타난고전적 가용도모델은하드웨어 리던던시와빠른 소프트웨어복구메커니즘이고려되지 않았으
며
,
다양한고장에따른다양한수리방법(manual, automatic
switchover
등)
과시간등을반영하지않아대부분의현대고가용도시스템에적용하는데어려움이있다
.
또한장비대수 를기준으로가용도를산출하는모델은설계자/
개발자차원에서조작이가능하며
,
자료의부정확성에따라실제가용도와다르게 산출될우려가있다
.
시간을기준으로하는가 용도산출방식도MTBF
에예방정비가포함되지않으므로운 용가용도 측면에서개발업체와운용자가간책임의 한계소 지가 있다.
따라서,
고가용도시스템의목표를 달성하기위 해서는본연구에서제시한마코브모델을적용한가용도모 델링이 바람직하다.
Fig. 9
Active-standby markov model using tool(UML2.0)
Table 4
Assumed parameter value for control board hardware
Parameter Symbol Value Units
Failure rate
λ0.0000042 failures/hours
Coverage factor
(active mode)
CA90.00 %
Coverage factor
(standby mode)
CS90.00 %
Failover Success
Probability
F99.00 %
Failover duration 1/
µFO0.1666667 minute Manual failover success
probability
FM99.00 %
Manual failover time 1/
µFOM30 minute
Repair/reboot time
µ240 minute
Uncovered failure
detection time(active) 1/
µSFA60 minute Uncovered failure
detection time(standby)
µSFS60 minute
Table 5
Probability solution and downtime
State Probability Minutes/year
1 0.999956 525,938.44
2 3.3599E-05 17.6715
3 1.0079E-05 5.3009
4 4.2E-07 0.2209
5 1.16E-08 0.0061
6 2.5E-09 0.0013
7 2.09E-08 0.0110
Total Downtime 0.2393
Fig. 9
에서설계한모델을기반으로 산출된가용도는 열 차제어시스템전체로확장될수있다.
구성품을하드웨어와 소프트웨어를분리하여모델링하고,
이에따른계산결과를 합산하면전체시스템의고장시간및 가용도를산출할수 있 다.
5. 결 론
본연구는현대의복잡한 철도시스템에적합한 고가용도
를 적용을위해
UML2.0
을 사용하여마코브적접근방법을통한아키텍처기반의고가용도시스템을모델링하였고
,
이 를기반으로고가용도모델을제시하였다.
제시된고가용도 모델은기존의 고전적인가용도산출방법의제한사항을 해결할수있으며
, UML2.0
을통해자료의추적성을보장할수있다
.
또한설계/
운용자및시스템엔지니어가시스템고장및 고장복구 프로세스를 모델링할 때 쉽게 적용가능하다.
참고문헌
[1] Eric Bauer, Xuemei Zhang, Douglas A. Kimber (2009) Practi- cal System Reliability, IEEE.
[2] K.-R. Chung (2006) A Design Process Based on System Engi- neering and Its Development Strategy to High Speed Rolling Stock,
Journal of the Korean Society for Railway, 9(4), pp. 18- [3] DoD (1998) “MIL-HDBK-338B”, pp. 5-70-5-87. 25.
[4] EN50126 (1999) The European Standard, Railway applica- tions The specification and demonstration of Reliability, Avail-
ability, Maintainability and Safety, pp. 60-61.
[5] IEC62278 (2002) Railway applications-The specification and demonstration of Reliability, Availability, Maintainability and Safety(RAMS).
[6] DoD (2009) “Reliability, Availability, Maintainability and Cost Rationale Report Manual”, pp. 5-70-5-87.
[7] TL 9000 Quality Measurement System, Measurements Hand- book, Release 4.0 (2006), QuEST Forum.
[8] I.-S. Chung, K.-W. Lee (2008) Study on Setting up the Quanti- tative RAM Goals for Rolling Stocks,
Journal of the Korean Society for Railway, 11(6), pp. 390-397.
[9] Y.-J. Seo, H.-K. Yang (2008) “Service Availability of the Urban Maglev System in Korea”, Maglev 2008, San Diego CA, USA.
[10] Telcordia Technologies (2006) Reliability Prediction Proce- dure for Electronic Equipment Issue 2,
Special Report SR-332. [11] K.-W. Lee, I.-S. Chung (2007) Reliability Allocation Model for KTX-II High Speed Train,
Journal of the Korean Society for Railway, 10(3), pp. 319-326.
[12] S.-C. Suh, J.-W. Lee (2009) Reliability Analysis for Train Con- trol System by Software Fault Tolerance Techniques,
Journalof the Korean Society for Railway
, 12(6), pp. 1043-1048.
[13] D.-O Shin, J.-H. Lee (2006) A Study on the Reliability Dem- onstration for Korea High Speed Train Control System,
Jour-nal of the Korean Society for Railway
, 9(4), pp.419-424.
[14] IEEE STD 610.12 as extended in the C4ISR AF v.2.0.
접수일(2010년 5월 18일), 수정일(2011년 1월 28일), 게재확정일(2011년 1월 30일)