Contents lists available atScienceDirect
Future Generation Computer Systems
journal homepage:www.elsevier.com/locate/fgcs
CoAP-based group mobility management protocol for the
Internet-of-Things in WBAN environment
Moneeb Gohar
a,*,
Jin-Ghoo Choi
b,
Seok-Joo Koh
caDepartment of Computer Science, Bahria University, Islamabad, Pakistan
bDepartment of Information and Communication Engineering, Yeungnam University, Republic of Korea cSchool of Computer Science and Engineering, Kyungpook National University, Republic of Korea
h i g h l i g h t s
• To support mobility management in web based Internet-of-Things environment is critical issue.
• A CoAP-based mobility management protocol, named CoMP has been proposed, but this protocol was designed for a single sensor node mobility.
• To overcome this limitation, this paper propose a CoAP-based group mobility management protocol, named CoMP-G in which one of the body sensor will function as a coordinator and it will exchange all the control messages with web-of-things mobility management system (WMMS) on behalf of other body sensors.
a r t i c l e i n f o Article history:
Received 31 October 2017 Received in revised form 4 May 2018 Accepted 2 June 2018
Available online 6 June 2018 Keywords: CoAP Mobility management Web-based IoT mobility WBAN Group mobility a b s t r a c t
The Constrained Application Protocol (CoAP) has been widely used, as the number of embedded sensors or devices increases. To support mobility management in web based Internet-of-Things environment is critical issue. For this purpose, a CoAP-based mobility management protocol, named CoMP has been proposed, but this protocol was designed for a single sensor node mobility. However, it does not perform well in group-based mobility. To overcome this limitation, we propose a CoAP-based group mobility management protocol, named CoMP-G. In the proposed scheme, one of the body sensor will function as a coordinator and it will exchange all the control messages with web-of-things mobility management system (WMMS) on behalf of other body sensors. Besides, each WMMS maintains the information of the group of body sensors. From the numerical analysis, we proved that the proposed scheme gives the best performance in terms of total signaling and handover delay from the existing CoMP protocol.
© 2018 Published by Elsevier B.V.
1. Introduction
Wireless Networks are the biggest components of network industry where computer networking is done using wireless con-nections by connecting network nodes [1]. With passing days’ different devices like mobile phones are now become the basic needs. So there is a need of Internet Protocol which are especially designed for the mobile devices when they move from one net-work to another. Nowadays, we are not limited to one netnet-work devices, such as the communication becomes Machine to Machine, Human to Machine and Machine to Human and Human to Human, this major penetration introduced the idea of Internet of Things (IoT) [2–5]. IoT serves in many fields like Medical sciences, elec-tronic engineering as well as mechanical engineering. IoT play a
*
Corresponding author.E-mail addresses:[email protected](M. Gohar),[email protected] (S. Koh).
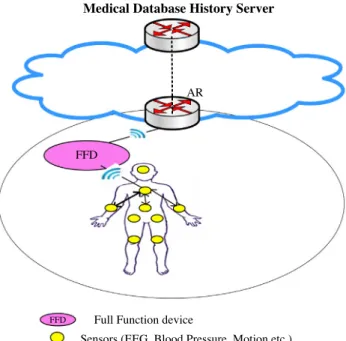
major role in the field of health care [6–8]. Intelligent medical small sensors can be worn on or implanted in the human body. These sensors measured the data and send it to external medical doctor. With these sensors the patient can move from place to another. Many people die from different fatal diseases, when it is diagnosed lately. For this purpose, the Wireless Body Area Network is used to detect early and prevent from the fatal diseases [8–10]. A wireless body area network are the specific types of sensor network which are designed to handle multiple medical sensors placed inside or outside of the body. The generalized model of WBAN is shown in
Fig. 1.
These days, each person has multiple devices that can commu-nicate each other. The communication pattern can be machine-to-machine, machine-to-machine, machine-to-human, and human-to-human. Anything we think of can exchange information to serve human beings. It is the concept of IoT [11]. IoT has found many applications in various fields such as medical science, electronic engineering as well as mechanical engineering [12]. Suppose we
https://doi.org/10.1016/j.future.2018.06.003 0167-739X/©2018 Published by Elsevier B.V.
Fig. 1. Generalized network model of WBAN.
have electric meters in our home that measures the amount of electrical energy consumption. If the meter also has the network ability and sends meter readings to the server, the bills are gener-ated automatically with less time. In this scenario, a machine-to-machine communication is involved.
IoT is very useful in the field of health care. Each patient can carry many sensor devices that evaluate and analyze his or her health state. If the devices can share the measured data with each other or report to the server in the Internet, doctors can know the exact health condition of the patient easily and send an alert in the emergency situation. The Wireless Body Area Network (WBAN) is designed for this application, which is a specialized wireless network handling multiple medical and environmental sensors inside or outside of the human body [13]. WBAN can be used with ECG electrodes, LM35 temperature sensor, blood glucose sensor, and much more [14].
In most wireless sensor network applications, sensor nodes are small, lightweight, inexpensive, and requires to operate perma-nently. Current technology is not able to meet most of the require-ments for the permanent operation of the sensor node due to the slow development of battery technology is realized. Due to the limitation of sensor battery, the researcher designed a new Con-strained Application Protocol (CoAP). CoAP is a RESTful application protocol for low power and constrained devices in Wireless Sensor Networks (WSNs) or Low-power and Lossy Networks (LLNs). The basic communication model for CoAP is the client–server model that exchanges messages between clients and servers. CoAP also provides group communication for effective communication with numerous sensors [15–17].
The Internet Engineering Task Force (IETF) has designed the CoAP group communication using IP multicast. However, multicast-based group communication scheme may not be reliable in WSNs. It is difficult to receive a response message for CoAP client, since connectivity between sensor and client may not be stable. To solve these problems, the unicast-based group communication scheme was developed. However, such unicast-based scheme has low performance for transmission delay and large network over-head. These group communication is for static nodes.
In wireless domain, it is necessary to provide mobility to sensor nodes. So for this purpose, a CoAP-based mobility management
protocol, named CoMP has been proposed, but this protocol was designed for a single sensor node mobility. However, it does not perform well in group-based mobility [18]. To overcome this lim-itation, we propose a CoAP-based group mobility management protocol, named CoMP-G, in which one of the sensor will function as a coordinator and it will exchange all the control messages with web-of-things mobility management system (WMMS) on behalf of other body sensors. Besides, each WMMS maintains the information of the group of mobile sensors.
The rest of this paper is organized as follows. Section 2 de-scribes the existing candidate mobility schemes for comparison. In Section3describes the proposed group-based mobility scheme. Section4demonstrates the performance analysis by comparing the proposed and existing scheme by numerical analysis and results. Section5concludes this paper.
2. Existing candidate scheme
The mobility management protocols in [19–26] may not be fit for supporting the mobility Management of CoAP sensor nodes. This is because the CoAP sensor nodes generally have constrained CPU processing power and memory capacities. The IETF have not addressed these limitations on the design of mobility protocols.
Therefore in [18], the author proposed CoAP-based Mobility Management Protocol (CoMP), which provide mobility manage-ment for CoAP sensor nodes. But this protocol was designed for a single sensor node mobility. In this paper, we will use the group of sensors attached to human body.
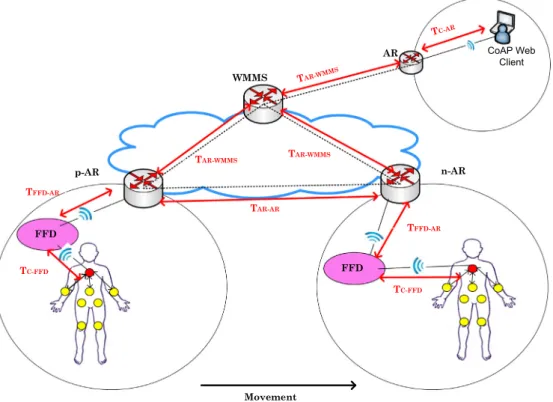
2.1. Network model of existing group mobility management using CoAP
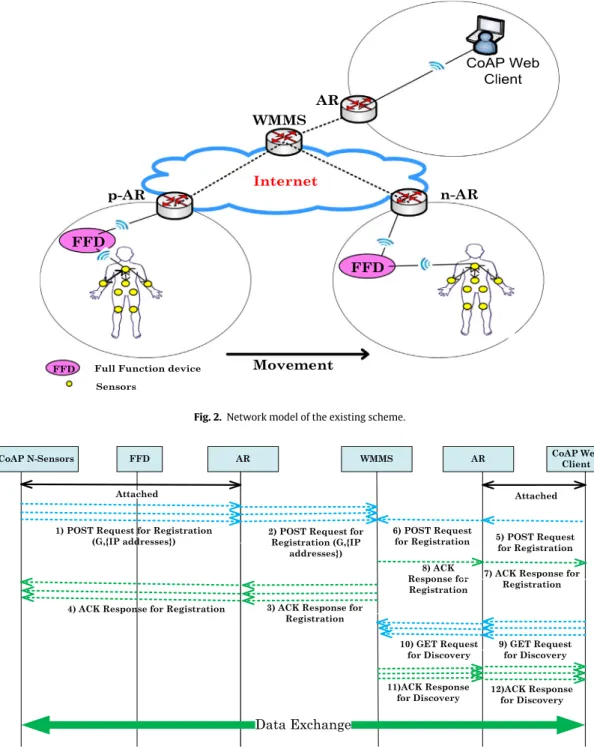
Fig. 2shows the network model of existing mobility manage-ment using CoAP. The existing scheme consider a group of sensors attached to human body which monitors the measured data. All the sensors exchange the control signaling messages with Access Router (AR). The AR domain contains Full-Function Device (FFD). The web-of-things mobility management system (WMMS) main-tains the information of each of sensors. The IP addresses of sensors are permanent, while the IP addresses of AR are temporary. Firstly, the body sensors attached with the previous AR and then it moves to the new AR domain.
2.2. Initial registration and data delivery
The existing CoMP scheme is based on CoAP protocol [18]. As shown inFig. 3, when a set of body sensors are attached with access router (AR), then each body sensor sends POST Request for
Registration message to WMMS via AR (Step 1,2). Upon reception
of this POST Request for Registration message from each of the body sensors, WMMS will update the database and responds with a ACK
Response for Registration to each of the body sensors via AR (Step
3,4).
On the other hand, the CoAP web client also registered with WMMS by exchanging POST Request for Registration and ACK
Re-sponse for Registration messages (Step 5,6,7,8). As the CoAP web
client want to communicate with body sensors, it sends GET
Re-quest for Discovery message for each body sensor to WMMS via
AR (Step 9,10). After finding each body sensor in the database, the WMMS replies with ACK Response for Discovery message to CoAP web client via AR on behalf of each body sensor (Step 11,12). After discovery, the CoAP web client and each body sensors can exchange the data via AR’s.
Fig. 2. Network model of the existing scheme.
Fig. 3. CoMP initial registration and data delivery.
2.3. Handover operations
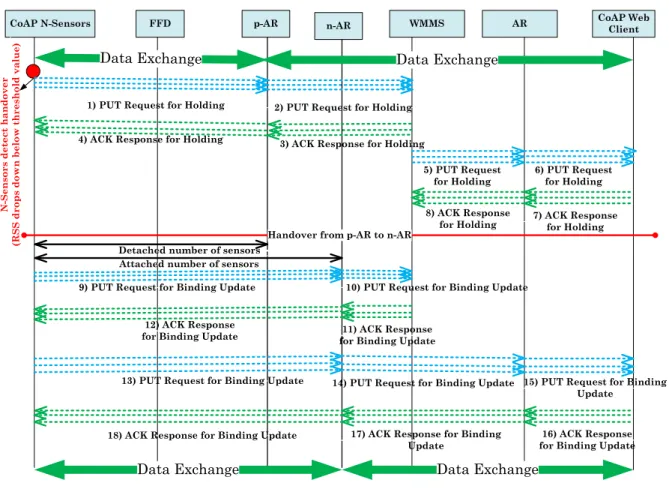
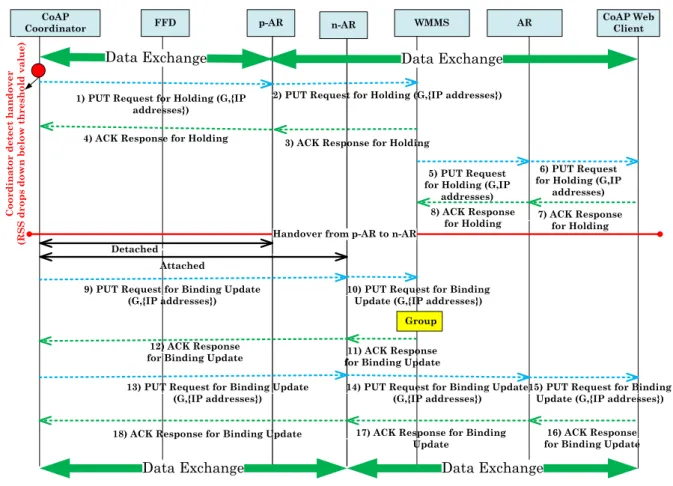
In this section, we consider the case in which the group of sensors moves from previous AR (p-AR) to new AR (n-AR) as shown inFig. 4. In order to perform the handover operation, each of the body sensors first detect the radio signal strength (RSS) from the previous AR. When RSS drops below by a certain threshold value, each of the body sensor starts handover operation by sending PUT
Request for Holding to WMMS via p-AR (Step 1, 2). The WMMS
updates the H_Flag status to 1 for all the body sensors. After that, the WMMS replies with ACK Response for Holding to each body sensor via p-AR (Step 3,4). The WMMS also forwards the PUT
Request for Holding on basis of each body sensor to CoAP web client
via AR (Step 5,6). The CoAP client updates its cache for each sensor. The CoAP web client respond with ACK Response for Holding to
WMMS via AR for each request on the basis of body sensor (Step 7,8).
We now assume that the body sensors changes its point of attachment in the same network domain. When the body sensors is detached from p-AR and attached to n-AR and received new temporary address from new AR (n-AR), each body sensor notifies the WMMS by sending PUT Request for Binding Update via n-AR (Step 9,10). The WMMS update its database for each body sensor and respond with ACK Response for Binding Update to each body sensor via n-AR (step 11,12). The body sensors also updates the CoAP web client by sending PUT Request for Binding Update via n-AR to CoAP web client (Step 13,14,15). The CoAP web client update its cache for each body sensor and replies with ACK Response
Fig. 4. CoMP handover operation.
Now, each body sensor and CoAP web client communication is established through new AR.
3. Proposed scheme
This section first describes the network model of the proposed scheme and then describing the registration and handover opera-tions.
3.1. Network model of group mobility management using CoAP
Fig. 5shows the network model of group mobility management using CoAP. We consider a group of sensors attached to human body which monitors the measured data. One of sensor function as a coordinator which exchange the control signaling messages with Access Router (AR) on behalf of other sensors. The AR domain contains Full-Function Device (FFD). The web-of-things mobility management system (WMMS) maintains the information of the group of sensors which is required to perform mobility as shown in
Table 1. The IP addresses of body sensors are permanent, while the IP addresses of AR’s are temporary. H_Flag indicate the handover status of the group of sensors. If the value of H_Flag is 1, then the corresponding group of body sensors become in handover status. If the value is 0, then the corresponding group of body sensors are not in handover status. A lifetime is the time in which the binding of permanent addresses of the group of sensors and temporary address of the AR are effective.
Initially, the coordinator communicates with CoAP web client in the previous access router (p-AR) domain, and then it moves to a new access router (n-AR) by handover.
3.2. Initial registration and data delivery
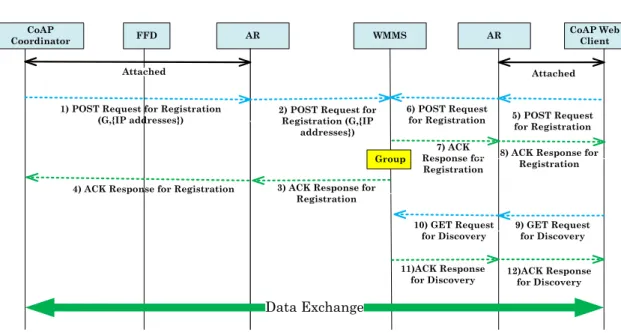
The main purpose of the registration phase is to reduce the amount of control messages.Fig. 6shows the detail initial regis-tration and data delivery of the proposed scheme. When a group of body sensors enter a CoMP AR domain and the coordinator is attached to AR, it sends aggregated POST Request for Registration message, containing the information on group, to WMMS via AR (Step 1, 2). Upon reception of this POST Request for Registration mes-sage from the coordinator, WMMS will make group of body sensors and responds with a ACK Response for Registration to coordinator via AR (Step 3, 4).
On the other hand, the CoAP web client also registered with WMMS by exchanging POST Request for Registration and ACK
Re-sponse for Registration messages (Step 5,6,7,8). As the CoAP web
client want to communicate with body sensors, it sends GET
Re-quest for Discovery message for finding group of body sensors to
WMMS via AR (Step 9,10). After finding group of body sensors in the database, the WMMS replies with ACK Response for Discovery message to CoAP web client via AR (Step 11,12). After discovery, the CoAP web client and coordinator can exchange the data via AR’s.
3.3. Handover operations
In this section, we consider the case in which the group of sensors moves from previous AR (p-AR) to new AR (n-AR) as shown inFig. 7. In order to perform the handover operation, the coordinator first detect the radio signal strength (RSS) from the previous AR. When RSS drops below by a certain threshold value, the coordinator starts handover operation by sending PUT Request
Table 1
Web-of-things mobility management system (WMMS).
Group P_Addr (Sensor IP address) T_Addr (AR IP address) H_Flag Lifetime
1 P_Addr_1
T_Addr
1 P_Addr_2
1 P_Addr_3
Fig. 5. Network model of the proposed scheme.
Fig. 6. Initial registration and data delivery.
H_Flag status to 1. After that, the WMMS replies with ACK Response
for Holding to coordinator via p-AR (Step 3,4). The WMMS also
forwards the PUT Request for Holding for the group to CoAP web client via AR (Step 5,6). The CoAP client updates its cache. The CoAP web client respond with ACK Response for Holding to WMMS via AR (Step 7,8).
We now assume that the coordinator changes its point of at-tachment in the same network domain. When the coordinator is detached from p-AR and attached to n-AR and received new temporary address from new AR (n-AR), the coordinator notifies the WMMS by sending PUT Request for Binding Update via n-AR
(Step 9,10). The WMMS update its database and respond with ACK
Response for Binding Update to coordinator via n-AR (step 11,12).
The coordinator also updates the CoAP web client by sending
PUT Request for Binding Update via n-AR to CoAP web client (Step
13,14,15). The CoAP web client update its cache and replies with
ACK Response for Binding Update to coordinator via n-AR (Step
16,17,18). Now, CoAP coordinator and CoAP web client communi-cation is through new AR.
Fig. 7. Handover operations.
Table 2
Parameters used for analysis.
Parameters Description
Sc Size of control packets (bytes)
NS Number of sensors in the domain
Bw Wired link bandwidth (Mbps) Bwl Wireless bandwidth (Mbps)
Lw Wired link delay (ms) Lwl Wireless link delay (ms)
Ha-b Hop count between node a and b in the network
q Wireless link failure probability Tq Average queuing delay at each node
4. Performance analysis
For performance analysis, we compare the registration and handover delays for the two candidate mobility schemes: CoMP, and CoMP-G.
4.1. Analysis model
We consider a network illustrated in Fig. 8, in which each wired/wireless link is represented by bandwidth, latency, and av-erage queuing delay. We adopt a generic model for Multiple Access Control (MAC) scheme to focus on the analysis of registration delay and handover delay associated with the proposed mobility scheme.
We summarize the notations used in our analysis inTable 2. In the figure, we denote Tx-y(S) by the transmission delay of a
message with size S sent from x to y via the ‘wireless’ link, where each message can experience the failure at the probability of q by using ‘i.i.d’ error model. Then, Tx-y(S) can be expressed as Tx-y(S)
=
[
1/
(1−
q)]×[
(S/
Bwl)+
Lwl]
. In the meantime, we denote Tx-y(S,
Hx-y)by the transmission delay of a message with size S sent from x to y via ‘wired’ link, where Hx-y represents the number of wired
hops between node x and node y. Then, Tx-y(S
,
Hx-y) is expressedas Tx-y(S
,
Hx-y)=
Hx-y× [
(S/
Bw)+
Lw+
Tq]
.4.2. Total signaling delay (TSD)
As shown inFig. 1, when the body sensors are attached to an AR, each body sensor exchange POST Request for Registration and ACK
Response for Registration messages with WMMS. After that WMMS
updates its database. Accordingly, we get the registration delay (RD) of CoMP as follows.
RDCoMP
=
NS× {
2TC -FFD(
Sc) +
2TFFD-AR(
Sc) +
2TAR-WMMS(
Sc)}.
(1)In CoMP, the data delivery delay (DDD) from CoAP web client to body sensors can be calculated as follows. First, the CoAP web client registered with WMMS. After registration, the CoAP web client want to communicate with body sensors. For finding the body sensors, CoAP web client exchanges GET Request for Discovery and ACK Response for Discovery messages for each body sensor with WMMS via AR. After discovery, the CoAP web client and each body sensors can exchange the data via AR’s.
Thus, the data delivery delay (DDD) of CoMP can be represented as follows,
DDDCoMP
=
NS× {
2TC -R(
Sc) +
2TAR-WMMS(
Sc)}.
(2)So, we obtain the TSD of CoMP as
TSDCoMP
=
RDCoMP+
DDDCoMP.
(3)As shown inFig. 4, the CoMP-G uses the aggregated POST
Fig. 8. Network model for performance analysis.
between coordinator and WMMS. Thus, we get the RD of COMP-G as
RDCoMP-G
=
2TC -FFD(
Sc) +
2TFFD-AR(
Sc) +
2TAR-WMMS(
Sc) .
(4)In CoMP-G, the data delivery delay (DDD) from CoAP web client to body sensors can be calculated as follows. First, the CoAP web client registered with WMMS. After registration, the CoAP web client want to find the body sensors to communicate with them. For this purpose, the CoAP web client exchanges GET Request for
Discovery and ACK Response for Discovery messages for body sensor
with WMMS via AR. After discovery, the CoAP web client and each body sensors can exchange the data via AR’s.
Thus, the data delivery delay (DDD) of CoMP-G can be repre-sented as follows,
DDDCoMP-G
=
2TC -R(
Sc) +
2TAR-WMMS(
Sc) .
(5)So, we obtain the TSD of CoMP-G as
TSDCoMP-G
=
RDCoMP-G+
DDDCoMP-G.
(6)4.3. Handover delay (HD)
In this section, we consider handover delay in which the group of sensors moves from previous AR (p-AR) to new AR (n-AR) as shown in Fig. 2. Each of the body sensors first detect the RSS signal from the previous AR. When RSS drops below by a certain threshold value, each of the body sensor starts handover operation by exchanging PUT Request for Holding and ACK Response for Holding with WMMS via p-AR. Then, WMMS also exchange the PUT Request
for Holding and ACK Response for Holding messages for each of body
sensor with CoAP web client via AR. The CoAP client updates its cache for each of body sensor.
When body sensors change its point of attachment and de-tached from p-AR and atde-tached to n-AR, each body sensor ex-changes PUT Request for Binding Update and ACK Response for
Bind-ing Update messages with WMMS. Each body sensor also updates
the CoAP web client by exchanging PUT Request for Binding Update and ACK Response for Binding Update messages. Now, each body sensor and CoAP web client communication is established through new AR. Accordingly, we get the HD of CoMP as follows.
HDCOMP
=
NS× {
2TC -FFD(
Sc) +
2TFFD-AR(
Sc) +
2TAR-WMMS(
Sc)
+
2TC -R(
Sc) +
2TAR-WMMS(
Sc) +
2TC -FFD(
Sc)
+
2TFFD-AR(
Sc) +
2TAR-WMMS(
Sc) +
2TC -FFD(
Sc)
+
2TFFD-AR(
Sc) +
2TAR-AR(
Sc) +
2TC -R(
Sc)}.
(7)In the proposed CoMP-G scheme, when the group of sensors moves from previous AR (p-AR) to new AR (n-AR) as shown in
Fig. 5. Firstly, each of the body sensors detect the RSS signal, if it drops below by a certain threshold value, the coordinator starts handover operation by exchanging PUT Request for Holding and
ACK Response for Holding with WMMS via p-AR. Then, WMMS also
exchange the PUT Request for Holding and ACK Response for Holding messages with CoAP web client via AR. The CoAP client updates its cache for the group.
When body sensors change its point of attachment and de-tached from p-AR and atde-tached to n-AR, coordinator exchanges
PUT Request for Binding Update and ACK Response for Binding Update
messages with WMMS. Coordinator updates the CoAP web client by exchanging PUT Request for Binding Update and ACK Response for
Binding Update messages. Now, each body sensor and CoAP web
client communication is established through new AR. Accordingly, we get the HD of CoMP-G as follows.
HDCOMP-G
=
2TC -FFD(
Sc) +
2TFFD-AR(
Sc) +
2TAR-WMMS(
Sc)
+
2TC -R(
Sc) +
2TAR-WMMS(
Sc) +
2TC -FFD(
Sc)
+
2TFFD-AR(
Sc) +
2TAR-WMMS(
Sc) +
2TC -FFD(
Sc)
+
2TFFD-AR(
Sc) +
2TAR-AR(
Sc) +
2TC -R(
Sc) .
(8)4.4. Numerical results
Based on the equations, we compare the performance of the ex-isting and proposed schemes. For numerical analysis, we configure
Table 3
Default parameter values.
Parameter Default Minimum Maximum
Lwl 15 1 55 Ns 10 1 50 q 0.5 0.1 0.9 HAR-WMMS 5 1 55 HAR-AR 3 HC -AR, HC -FFD, HFFD-AR 1 Tq 5 Lw 2 Sc 50 bytes Bwl 0.25 Mbps Bw 10 Mbps
the default parameter values, as described inTable 3, by referring to [18,27].
4.4.1. Total signaling delay (TSD)
Fig. 9illustrates the impact of wireless link delay (Lwl) on total
signaling delay. We can see in the figure that the total signaling delay linearly increases, as Lwl gets larger for both the candidate
schemes. It is shown in the figure that the proposed CoMP-G scheme perform better than the existing CoMP scheme. This is be-cause coordinator in CoMP-G scheme perform signaling operation with WMMS on behalf of body sensors.
Fig. 10 shows the impact of number of sensors (NS) on
to-tal signaling delay. We observe from the figure that CoMP gives worse performance than the CoMP-G. This is because each of the body sensor exchanges signaling messages with WMMS and also the CoAP web client sends discovery messages to find each body sensors addresses to WMMS. In contrast, the proposed CoMP-G scheme is not effected by the number of sensors. This is because in the proposed scheme the coordinator can exchange the signaling messages with WMMS on behalf of body sensors.
Fig. 11shows the impact of wireless link failure probability on total signaling delay. We observe that the total signaling delay linearly increases, as q gets larger for both the candidate schemes. This is because both the schemes use wireless links for the body sensors. We can see in the figure that the proposed scheme gives better performance than the existing scheme.
Fig. 12illustrates the impact of hop count between AR and WMMS on total signaling delay. From the figure, we can see that hop count between AR and WMMS gives significant impact on both the candidate schemes. In particular, CoMP is more sensitive. This is because each of the body sensor exchanges signaling messages with WMMS. While CoMP-G is less sensitive, this is because the coordinator can exchange the signaling messages with WMMS on behalf of body sensors. We can see in the figure that the proposed scheme performs better than the existing scheme.
4.4.2. Handover delay (HD)
Fig. 13shows the impact of wireless link delay (Lwl) on total
signaling delay. In the figure, we can see, that the handover delay linearly increases, as Lwlgets larger for both the candidate schemes.
The proposed CoMP-G scheme gives better performance than the existing CoMP scheme. This is because in the proposed scheme the coordinator can exchange the signaling messages with WMMS on behalf of body sensors.
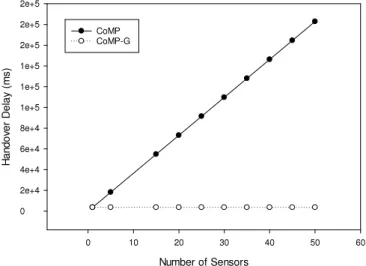
Fig. 14 illustrates the impact of number of sensors (NS) on
handover delay. We notice from the figure that CoMP perform worse than the proposed CoMP-G scheme. This is because each of the body sensor exchanges signaling messages with WMMS. On the other hand, the proposed CoMP-G scheme is not effected by the number of sensors. This is because the coordinator can exchange the signaling messages with WMMS on behalf of body sensors.
Fig. 9. Impact of Lwlon total signaling delay.
Fig. 10. Impact of NSon total signaling delay.
Fig. 11. Impact of q on total signaling delay.
Fig. 15shows the impact of wireless link failure probability on handover delay. We can see in the figure that the total signaling delay linearly increases, as q gets larger for both the candidate schemes. This is because both the schemes use wireless links for
Fig. 12. Impact of HAR-WMMSon total signaling delay.
Fig. 13. Impact of Lwlon handover delay.
the body sensors. As shown in the figure, the proposed scheme gives better performance than the existing scheme.
Fig. 16illustrates the impact of hop count between AR and WMMS on handover delay. From the figure, we can see that CoMP is more sensitive as hop count between AR and WMMS increases. This is because each of the body sensor exchanges signaling mes-sages with WMMS. While CoMP-G is less sensitive, this is because the coordinator can exchange the signaling messages with WMMS on behalf of body sensors.
5. Conclusion
In this paper, we propose a CoAP-based group mobility man-agement protocol, named CoAP-G. In the proposed scheme, one of the sensor will function as a coordinator and it will exchange all the control messages with web-of-things mobility management system (WMMS) on behalf of other sensors. Besides, each WMMS maintains the information of the group of mobile sensors. From the numerical analysis, we proved that the proposed scheme gives the best performance in terms of total signaling and handover delay from the existing CoMP protocol.
Fig. 14. Impact of NSon handover delay.
Fig. 15. Impact of q on handover delay.
References
[1] A. Al-Fuqaha, M. Guizani, M. Mohammadi, M. Aledhari, M. Ayyash, Internet of things: a survey on enabling technolo-gies, protocols, and applications, IEEE Commun. Surv. Tutor. 17 (4) (2015) 2347–2376.
[2] Awais Ahmad, Anand Paul, M. MazharRathore, Hangbae Chang, Smart cyber society: Integration of capillary devices with high usability based on Cyber– Physical system, Future Gener. Comput. Syst. 56 (2016) 493–503.
[3] Guinard. Dominique, et al., Towards physical mashups in the web of things, in: Networked Sensing Systems (INSS), Sixth International Conference on, IEEE, 2009.
[4] M.A. Razzaque, M. Milojevic-Jevric, A. Palade, S. Clarke, Middleware for inter-net of things: a survey, IEEE Interinter-net Things J. 3 (1) (2016) 70–95.
[5] J. Jin, J. Gubbi, S. Marusic, M. Palaniswami, An informa-tion framework for creating a smart city through internet of things, IEEE Internet Things J. 1 (2) (2014) 112–121.
[6] S.M.R. Islam, D. Kwak, M.H. Kabir, M. Hossain, K.-S. Kwak, The internet of things for health care: a comprehensive survey, IEEE Access 3 (2015) 678–708. [7] M. Khan, B.N. Silva, K. Han, Internet of things based energy aware smart home
control system, IEEE Access 4 (2016) 7556–7566.
[8] Mohammad Ghamari, et al., A survey on wireless body area networks for ehealthcare systems in residential environments, MDPI Sens. (2016). [9] Riccardo Cavallari, et al., Survey on wireless body area networks: Technologies
and design challenges, IEEE Commun. Surv. Tutor. 16 (3) (2014).
[10] Raju Sharma, et al., Wireless body area nework–a review, Int. J. Eng. Sci. (2016). [11] Chen Shanzhi, Hui Xu, Dake Liu, Bo Hu, Hucheng Wang, A vision of IoT: Ap-plications, challenges, and opportunities with china perspective, IEEE Internet Things J. 1 (4) (2014) 349–359 52.
[12] Kumar Vinoth, Ontology based public healthcare system in Internet of Things (IoT), Procedia Comput. Sci. 50 (2015) 99–102.
[13] Purna B. Samal, Ping Jack Soh, Guy AE Vandenbosch, UWB all-textile antenna with full ground plane for off-body WBAN communications, IEEE Trans. An-tennas Propag. 62 (1) (2014) 102–108.
[14] Devita Gabriele, Alan Chi Wai Wong, Mark Dawkins, K. Glaros, U. Kiani, Franco Lauria, V. Madaka, et al., A 5mW multi-standard Bluetooth LE/IEEE 802.15. 6 SoC for WBAN applications, in: European Solid State Circuits Conference (ESSCIRC), ESSCIRC 2014-40th, IEEE, 2014, pp. 283–286.
[15] Bormann Carsten, Angelo P. Castellani, Zach Shelby, CoAP: An application protocol for billions of tiny internet nodes, IEEE Internet Comput. 16 (2) (2012) 62–67.
[16] Kovatsch Matthias, Simon Duquennoy, Adam Dunkels, A low-power CoAP for Contiki, in: Mobile Adhoc and Sensor Systems (MASS), IEEE 8th International Conference on, IEEE, 2011.
[17] Z. Shelby, K. Hartke, C. Bormann, The Constrained Application Protocol (CoAP). The Internet Engineering Task Force, Fremont, CA, RFC 7252, 2014. [18] S.M. Chun, H.S. Kim, J.T. Park, CoAP-based mobility management for the
Inter-net of Things, Sensors 15 (2015) 16060–16082.
[19] A.J. Jara, D. Fernandez, P. Lopez, M.A. Zamora, A.F. Skarmeta, Lightweight MIPv6 with ipsec support, Mob. Inf. Syst. 10 (2014) 37–77.
[20] A.J. Jara, D. Fernandez, P. Lopez, M.A. Zamora, A.F. Skarmeta, Lightweight mobile IPv6: A mobility protocol for enabling transparent IPv6 mobility in the internet of things, IEEE Glob. Commun. Conf. 12 (2013) 2791–2797. [21] H. Sungmin, D. Kim, M. Ha, S. Bae, S. Park, W. Jung, J. Kim, SNAIL: An
IP-based wireless sensor network approach to the internet of things, IEEE Wirel. Commun. 17 (2010) 34–42.
[22] A.J. Jara, M.A. Zamora, A.F.G. Skarmeta, An architecture based on internet of things to support mobility and security in medical environments, in: Pro-ceedings of 7th IEEE Consumer Communications and Networking Conference (CCNC), Las Veagas, NV, USA, 9–12 January 2010, pp. 1–5.
[23] C. Kai, Y. Zhimin, C. Rongyi, L. Chenghao, A handoff algorithm based on care-of address pool for hierarchical mobile IPv6, in: Proceedings of 3rd International Conference on Pervasive Computing and Applications, Alexandria, 6–8 Octo-ber 2008, pp. 302–306.
[24] A. Berguiga, H. Youssef, Efficient mobility management in 6LoWPAN wireless sensor networks, in: Proceedings of The Ninth International Conference on Wireless and Mobile Communications (ICWMC 2013), Nice, France, 21–26 July 2013, pp. 244–250.
[25] S. Gligoric. Krco, D. Drajic, S. Jokić, B. Jakovljevic, M2M device management in LTE networks, in: Proceedings of 19th Telecommunications Forum (TELFOR), Belgrade, 22–24 November 2011, pp. 414–417.
[26] F. Ganz, R. Li, P. Barnaghi, H. Harai, A Resource mobility scheme for service-continuity in theinternet of things, in: Proceedings of 2012 IEEE International Conference on Green Computing and Communications, Besançon, France, 20– 23 November 2012, pp. 261–264.
[27]C. Makaya, S. Pierre, An analytical framework for performance evaluation of IPv6-based mobility management protocols, IEEE Trans. Wirel. Commun. 7 (3) (2008) 972–983.
Moneeb Gohar received B.S. degree in Computer Science
from University of Peshawar, Pakistan, and M.S. degree in Technology Management from Institute of Management Sciences, Pakistan, in 2006 and 2009, respectively. He also received Ph.D. degree from the School of Computer Science and Engineering in the Kyungpook National Uni-versity, Korea, in 2012. From September 2012 to Septem-ber 2014, he worked as a Post-Doctoral researcher for Software Technology Research Center (STRC) in Kyung-pook National University, Korea. From September 2014 to September 2016, he worked as a Foreign Assistant Pro-fessor with the Department of Information and Communication Engineering in the Yeungnam University. He has been as a Senior Assistant Professor with the Department of Computer Science in the Bahria University Islamabad, Pakistan since September 2016. His current research interests include Network Layer Protocols, Wireless Communication, Mobile Multicasting, Wireless Sensors Networks, TRILL, Big Data and Internet Mobility.
Jin-Ghoo Choi received his PhD degree from the School
of Electrical Engineering and Computer Science, Seoul Na-tional University in 2005. From 2006 to 2007, he worked for Samsung Electronics as a senior engineer. In 2009, he was with the Department of Electrical and Computer En-gineering in The Ohio State University as a visiting scholar. He joined the Department of Information and Commu-nication Engineering in Yeungnam University as a fac-ulty member in 2010. His research interests include per-formance analysis of communication networks, resource management in wireless networks, and wireless sensor network.
Seok-Joo Koh received the B.S. and M.S. degrees in
Man-agement Science from KAIST in 1992 and 1994, respec-tively. He also received Ph.D. degree in Industrial Engi-neering from KAIST in 1998. From August 1998 to February 2004, he worked for Protocol Engineering Center in ETRI. He has been as a professor with the school of Computer Science and Engineering in the Kyungpook National Uni-versity since March 2004. His current research interests include mobility management in the future Internet, IP mobility, multicasting, and SCTP. He has so far participated in the international standardization as an editor in ITU-T SG13 and ISO/IEC JTC1/SC6.